JP4766031B2 - 倒立型移動体および倒立型移動体の制御方法 - Google Patents
倒立型移動体および倒立型移動体の制御方法 Download PDFInfo
- Publication number
- JP4766031B2 JP4766031B2 JP2007274769A JP2007274769A JP4766031B2 JP 4766031 B2 JP4766031 B2 JP 4766031B2 JP 2007274769 A JP2007274769 A JP 2007274769A JP 2007274769 A JP2007274769 A JP 2007274769A JP 4766031 B2 JP4766031 B2 JP 4766031B2
- Authority
- JP
- Japan
- Prior art keywords
- inverted
- inverted state
- moving body
- state
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 58
- 230000005856 abnormality Effects 0.000 claims description 106
- 230000002159 abnormal effect Effects 0.000 claims description 36
- 238000001514 detection method Methods 0.000 claims description 14
- 238000005259 measurement Methods 0.000 claims description 11
- 230000001133 acceleration Effects 0.000 description 21
- 238000010586 diagram Methods 0.000 description 6
- 230000005484 gravity Effects 0.000 description 6
- 210000002414 leg Anatomy 0.000 description 5
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000002474 experimental method Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000009191 jumping Effects 0.000 description 1
- 210000003127 knee Anatomy 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/08—Control of attitude, i.e. control of roll, pitch, or yaw
- G05D1/0891—Control of attitude, i.e. control of roll, pitch, or yaw specially adapted for land vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K11/00—Motorcycles, engine-assisted cycles or motor scooters with one or two wheels
- B62K11/007—Automatic balancing machines with single main ground engaging wheel or coaxial wheels supporting a rider
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Mechanical Engineering (AREA)
- Motorcycle And Bicycle Frame (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
以下に、図1から図5を参照しつつ本発明の実施の形態1にかかる倒立型移動体および倒立型移動体の制御方法について説明する。
図6から図8を参照しつつ本発明の実施の形態2にかかる倒立型移動体および倒立移動体の制御方法について説明する。この実施形態に係る移動体は、前述の実施の形態1において説明した移動体とほぼ同様の構成を備えるが、前述の実施形態と異なり、回転体(駆動輪)の回転角度と、移動体本体の傾斜角速度の2つについて、その実測値と推定値の偏差を各々求め、これらの偏差に基づいて倒立状態の異常を検知するとともに、その異常度合いを判断するものである。以下、詳細に説明する。本実施形態においては、前述の実施形態において説明した移動体の各構成と同一または同様の構成であるため、その具体的な構成については説明を省略するものとする。
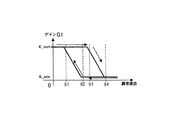
本実施形態に係る倒立型移動体においては、具体的には、移動体本体10の傾斜角速度の実測値と推定値の偏差xを横軸、回転体(駆動輪)の回転角速度の実測値と推定値の偏差yを縦軸とした位相平面において、移動体1の移動中に得られる偏差の値(x,y)を前記位相平面内に座標として配置することで、移動体の倒立状態の異常を検知する。
10・・・移動体本体
11・・・搭乗台
12・・・座席
13・・・背当て部
14・・・脚支持部
15・・・足載置部
18・・・接続部材
18a・・・加速度センサ(速度推定部)
18b・・・ジャイロ(測定部)
20・・・制御ボックス
21,22・・・モータ(駆動部)
23・・・制御部
23a・・・記憶領域
24・・・回転角センサ(測定部)
25・・・バッテリー
26・・・検出部
31,32・・・駆動輪(回転体)
P・・・床面
Claims (21)
- 断面が円形の回転体と、
前記回転体を回転駆動させる駆動部と、
前記回転体を保持する移動体本体と、
前記駆動部を制御し、床面に接する前記回転体の回転駆動を制御することで前記移動体本体の倒立状態を維持する制御部と、
前記回転体の回転角速度を検出する第1のセンサと、
前記移動体本体に作用する外力及び前記移動体本体の傾斜状態の少なくとも1つを検出する第2のセンサと、を備える倒立型移動体であって、
前記制御部が、前記移動体本体の傾斜状態に基づいて得られた信号に所定のゲインを乗じ、倒立状態を維持するための前記回転体の駆動量を算出するとともに、前記第1のセンサの出力値及び前記第2のセンサの出力値の少なくとも1つに基づいて前記移動体本体の倒立状態が正常か否かを判断し、前記移動体本体の倒立状態が異常であると判断した場合には、前記ゲインを低減することを特徴とする倒立型移動体。 - 前記制御部が、前記第1のセンサの出力値及び前記第2のセンサにより出力される前記移動体本体の傾斜状態に基づいて前記移動体本体の倒立状態の異常度合いを検知し、前記移動体本体の倒立状態の異常度合いに応じて、前記ゲインを低減する度合いを変化させることを特徴とする請求項1に記載の倒立型移動体。
- 前記移動体本体の倒立状態の異常度合いに応じた前記ゲインの上限値および下限値を定め、前記制御部が、前記上限値および下限値の間でゲインを変化させることを特徴とする請求項2に記載の倒立型移動体。
- 前記移動体本体の速度を検出する速度検出部をさらに備えるとともに、
前記制御部が、前記移動体本体の傾斜状態に基づいて得られた信号に所定のゲインを乗じた値と、前記速度検出部により検出された前記移動体本体の速度に基づいて得られた信号に所定のゲインを乗じた値とに基づいて、倒立状態を維持するための前記回転体の駆動量を算出することを特徴とする請求項1乃至3いずれか1項に記載の倒立型移動体。 - 前記制御部が、前記移動体本体の倒立状態が異常であると判断した場合に、前記移動体本体の速度に基づいて得られた信号に乗じるゲインを増大させることを特徴とする請求項4に記載の倒立型移動体。
- 前記移動体本体の速度を推定する速度推定部をさらに備え、
前記制御部が、前記移動体本体の倒立状態が異常であると判断した場合に、前記速度推定部により推定された速度に基づいて目標速度を定め、該目標速度を得るように,前記移動体本体の速度に基づいて得られた信号に乗じるゲインを増大させることを特徴とする請求項4または5に記載の倒立型移動体。 - 前記移動体本体の鉛直方向に対する傾斜角度、傾斜角速度、前記回転体の回転角度および回転角速度からなる4つのパラメータの実測値を同時に取得する測定部と、前記測定部により取得した4つのパラメータの実測値のうち、選択した3つのパラメータの実測値と前記回転体の制御量に基づいて、選択しなかった他の1つのパラメータの値を推定する推定部をさらに備え、
前記選択しなかったパラメータの推定値と実測値との偏差に基づいて、前記移動体本体の倒立状態の異常を検知することを特徴とする請求項1乃至6いずれか1項に記載の倒立型移動体。 - 前記実測値と推定値との偏差の大きさに基づいて、前記移動体本体の倒立状態の異常度合いを判断することを特徴とする請求項7に記載の倒立型移動体。
- 前記4つのパラメータの実測値のうち、3つのパラメータを少なくとも2通り以上選択し、その各々について得られた、他の1つのパラメータの推定値と実測値との偏差に基づいて、前記移動体本体の倒立状態の異常を検知することを特徴とする請求項7または8に記載の倒立型移動体。
- 前記4つのパラメータのうち、前記移動体本体の鉛直方向に対する傾斜角度の実測値と推定値、および前記回転体の回転角速度の実測値と推定値を各々求め、これらの実測値と推定値との偏差に基づいて前記移動体本体の倒立状態の異常を検知することを特徴とする請求項7乃至9いずれか1項に記載の倒立型移動体。
- 前記移動体本体の鉛直方向に対する前記傾斜角度の実測値と推定値の偏差、および前記回転体の回転角速度の実測値と推定値の偏差を連続的かつ同時に取得し、これらの偏差の値を、傾斜角度の実測値と推定値の偏差を一方の軸、前記回転体の回転角速度の実測値と推定値の偏差を他方の軸とした位相平面内に座標として配置することで得られる軌道に基づいて、前記移動体本体の倒立状態の異常を検知することを特徴とする請求項9に記載の倒立型移動体。
- 前記位相平面において、予め所定の領域を定めるとともに、得られた軌道が前記領域から離れた距離に基づいて、前記移動体本体の倒立状態の異常度合いを判断することを特徴とする請求項11に記載の倒立型移動体。
- 前記位相平面における軌道の傾きに基づいて、前記移動体本体の倒立状態の異常度合いを判断することを特徴とする請求項11に記載の倒立型移動体。
- 前記移動体本体が、搭乗者を載置する搭乗台を有することを特徴とする請求項1乃至13いずれか1項に記載の倒立型移動体。
- 前記回転体が、前記移動体本体の移動方向に対して両側に平行に設けられた一対の車輪であり、該車輪が各々独立して回転制御可能であることを特徴とする請求項1乃至14いずれか1項に記載の倒立型移動体。
- 断面が円形の回転体と、
前記回転体を回転駆動させる駆動部と、
前記回転体を保持する移動体本体と、
前記駆動部を制御し、床面に接する前記回転体の回転駆動を制御することで前記移動体本体の倒立状態を維持する制御部と、
前記回転体の回転角速度を検出する第1のセンサと、
前記移動体本体に作用する外力及び前記移動体本体の傾斜状態の少なくとも1つを検出する第2のセンサと、を備える倒立型移動体の倒立状態を制御する制御方法であって、
前記移動体本体の傾斜状態を示す信号を取得する傾斜状態取得ステップと、
取得した前記移動体本体の傾斜状態に基づいて得られた信号に所定のゲインを乗じて倒立状態を維持するための前記回転体の駆動量を算出する駆動量算出ステップと、を備えるとともに、
前記制御部が、前記第1のセンサの出力値及び前記第2のセンサの出力値の少なくとも1つに基づいて前記移動体本体の倒立状態が正常か否かを判断する倒立状態判断ステップと、
前記制御部が、前記移動体本体の倒立状態が異常であると判断した場合に、前記ゲインを低減するゲイン低減ステップとをさらに備えることを特徴とする倒立型移動体の制御方法。 - 前記倒立状態判断ステップにおいて、前記制御部が、前記第1のセンサの出力値及び前記第2のセンサにより出力される前記移動体本体の傾斜状態に基づいて前記移動体本体の倒立状態の異常度合いを検知し、
前記ゲイン低減ステップにおいて、前記制御部が、前記移動体本体の倒立状態の異常度合いに応じて、前記ゲインを低減する度合いを変化させることを特徴とする請求項16に記載の倒立型移動体の制御方法。 - 前記ゲイン低減ステップにおいて、前記移動体本体の倒立状態の異常度合いに応じた前記ゲインの上限値および下限値を定め、前記制御部が、前記上限値および下限値の間でゲインを変化させることを特徴とする請求項17に記載の倒立型移動体の制御方法。
- 前記移動体本体の速度を検出する速度検出ステップをさらに備えるとともに、
前記駆動量算出ステップおいて、傾斜状態取得ステップで取得された前記移動体本体の傾斜状態に基づいて得られた信号に所定のゲインを乗じた値と、速度検出ステップで検出された前記移動体本体の速度に基づいて得られた信号に所定のゲインを乗じた値とに基づいて、倒立状態を維持するための前記回転体の駆動量を算出することを特徴とする請求項16乃至18いずれか1項に記載の倒立型移動体の制御方法。 - 前記倒立状態判断ステップにおいて、前記制御部が、前記移動体本体の倒立状態が異常であると判断した場合に、前記移動体本体の速度に基づいて得られた信号に乗じるゲインを増大させるゲイン増大ステップをさらに備えることを特徴とする請求項19に記載の倒立型移動体の制御方法。
- 前記移動体本体の速度を推定する速度推定ステップをさらに備え、
前記倒立状態判断ステップにおいて、前記制御部が、前記移動体本体の倒立状態が異常であると判断した場合に、前記駆動量算出ステップおいて、速度推定ステップにより推定された速度に基づいて定められた目標速度を得るように、前記回転体の駆動量を算出することを特徴とする請求項19または20に記載の倒立型移動体の制御方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007274769A JP4766031B2 (ja) | 2007-10-23 | 2007-10-23 | 倒立型移動体および倒立型移動体の制御方法 |
| PCT/JP2008/066712 WO2009054207A1 (ja) | 2007-10-23 | 2008-09-17 | 倒立型移動体および倒立型移動体の制御方法 |
| US12/440,980 US8560152B2 (en) | 2007-10-23 | 2008-09-17 | Inverted type moving body and method of controlling same |
| CN2008801129296A CN101836171B (zh) | 2007-10-23 | 2008-09-17 | 倒立型移动体以及倒立型移动体的控制方法 |
| EP08832768.9A EP2083340B1 (en) | 2007-10-23 | 2008-09-17 | Inverted type movable body and control method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007274769A JP4766031B2 (ja) | 2007-10-23 | 2007-10-23 | 倒立型移動体および倒立型移動体の制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009104360A JP2009104360A (ja) | 2009-05-14 |
| JP4766031B2 true JP4766031B2 (ja) | 2011-09-07 |
Family
ID=40579314
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007274769A Expired - Fee Related JP4766031B2 (ja) | 2007-10-23 | 2007-10-23 | 倒立型移動体および倒立型移動体の制御方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8560152B2 (ja) |
| EP (1) | EP2083340B1 (ja) |
| JP (1) | JP4766031B2 (ja) |
| CN (1) | CN101836171B (ja) |
| WO (1) | WO2009054207A1 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5306951B2 (ja) * | 2009-09-18 | 2013-10-02 | 本田技研工業株式会社 | 倒立振子型車両 |
| JP5330200B2 (ja) * | 2009-11-13 | 2013-10-30 | 本田技研工業株式会社 | 倒立振子型車両の制御装置 |
| JP5330199B2 (ja) * | 2009-11-13 | 2013-10-30 | 本田技研工業株式会社 | 倒立振子型車両の制御装置 |
| JP5330198B2 (ja) * | 2009-11-13 | 2013-10-30 | 本田技研工業株式会社 | 倒立振子型車両の制御装置 |
| JP5488095B2 (ja) * | 2010-03-23 | 2014-05-14 | トヨタ自動車株式会社 | 倒立型移動体及びその制御方法 |
| JP5652043B2 (ja) * | 2010-08-06 | 2015-01-14 | トヨタ自動車株式会社 | 倒立型移動体、その制御方法及び制御プログラム |
| JP5595978B2 (ja) * | 2011-05-28 | 2014-09-24 | 双葉電子工業株式会社 | 遠隔制御機器の駆動制御装置 |
| JP5983457B2 (ja) * | 2013-02-19 | 2016-08-31 | トヨタ自動車株式会社 | 倒立二輪車及びその制御方法 |
| JP5800110B2 (ja) * | 2013-10-10 | 2015-10-28 | 株式会社村田製作所 | 手押し車 |
| CN108068938B (zh) * | 2016-11-11 | 2020-01-03 | 广东高标电子科技有限公司 | 一种双轮车速度控制方法及系统 |
| JP6920871B2 (ja) * | 2017-04-24 | 2021-08-18 | 本田技研工業株式会社 | 倒立振子型車両 |
| JP2019043494A (ja) * | 2017-09-07 | 2019-03-22 | トヨタ自動車株式会社 | 倒立二輪車 |
| CN111596653A (zh) * | 2020-04-09 | 2020-08-28 | 北京理工大学 | 一种消防机器人及其控制方法、电子设备 |
| CN115320763B (zh) * | 2021-11-19 | 2024-06-07 | 钭俊龙 | 一种操作容易的两轮电动平衡车及控制方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4926333A (en) * | 1988-04-20 | 1990-05-15 | Mitsubishi Jidosha Kogyo Kabushiki Kaisha | Traction control apparatus |
| DE4000423C2 (de) | 1990-01-09 | 1998-10-08 | Dorst Masch & Anlagen | Presse zur Herstellung maßhaltiger Preßlinge aus pulverförmigem Material |
| AU774742B2 (en) | 1999-03-15 | 2004-07-08 | Deka Products Limited Partnership | Control system and method for wheelchair |
| JP4162995B2 (ja) | 2000-10-13 | 2008-10-08 | デカ・プロダクツ・リミテッド・パートナーシップ | 個人用輸送車の制御 |
| EP1529556B1 (en) * | 2003-11-04 | 2013-02-20 | Toyota Jidosha Kabushiki Kaisha | Travelling apparatus and method for controlling thereof |
| JP4948416B2 (ja) | 2004-10-08 | 2012-06-06 | セグウェイ・インコーポレイテッド | ピッチ調節による乗り物の制御 |
| JP4635692B2 (ja) * | 2005-04-12 | 2011-02-23 | トヨタ自動車株式会社 | 車両装置及びその制御方法 |
| JP4872276B2 (ja) * | 2005-09-02 | 2012-02-08 | トヨタ自動車株式会社 | 走行体 |
| JP4802622B2 (ja) * | 2005-09-06 | 2011-10-26 | トヨタ自動車株式会社 | 走行体および走行体の動作調節方法 |
| JP4600223B2 (ja) * | 2005-09-12 | 2010-12-15 | トヨタ自動車株式会社 | 走行体および走行体の動作調節方法 |
| CN100511326C (zh) * | 2005-10-18 | 2009-07-08 | 中国科学技术大学 | 两轮遥控小车倒立摆及其平衡控制方法 |
| JP4802692B2 (ja) * | 2005-12-09 | 2011-10-26 | トヨタ自動車株式会社 | 走行体 |
-
2007
- 2007-10-23 JP JP2007274769A patent/JP4766031B2/ja not_active Expired - Fee Related
-
2008
- 2008-09-17 CN CN2008801129296A patent/CN101836171B/zh not_active Expired - Fee Related
- 2008-09-17 EP EP08832768.9A patent/EP2083340B1/en not_active Expired - Fee Related
- 2008-09-17 US US12/440,980 patent/US8560152B2/en not_active Expired - Fee Related
- 2008-09-17 WO PCT/JP2008/066712 patent/WO2009054207A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| CN101836171B (zh) | 2012-07-04 |
| EP2083340A1 (en) | 2009-07-29 |
| EP2083340A4 (en) | 2011-04-27 |
| WO2009054207A1 (ja) | 2009-04-30 |
| EP2083340B1 (en) | 2013-10-23 |
| CN101836171A (zh) | 2010-09-15 |
| US8560152B2 (en) | 2013-10-15 |
| US20100179749A1 (en) | 2010-07-15 |
| JP2009104360A (ja) | 2009-05-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4766031B2 (ja) | 倒立型移動体および倒立型移動体の制御方法 | |
| KR101158372B1 (ko) | 도립 차륜형 이동체 및 그 제어 방법 | |
| JP4605204B2 (ja) | 倒立振子型移動体、及びその制御方法 | |
| JP4735598B2 (ja) | 倒立車輪型移動体、及びその制御方法 | |
| JP5024652B2 (ja) | 車両 | |
| US8014923B2 (en) | Travel device | |
| JP5065206B2 (ja) | 移動体、倒立型移動体、及びその制御方法 | |
| JP2007062682A (ja) | 走行体 | |
| JP4978622B2 (ja) | 倒立型移動体及びその異常判断方法 | |
| JP2007168602A (ja) | 二輪移動台車 | |
| JP2008241462A (ja) | 車輪半径推定装置 | |
| JP4973303B2 (ja) | 倒立型移動体および倒立型移動体の移動停止方法 | |
| JP5167077B2 (ja) | 移動体、及びその制御方法 | |
| JP2009101897A (ja) | 倒立車輪型移動体、及びその制御方法 | |
| JP2012020739A (ja) | 走行体 | |
| JP5228560B2 (ja) | 倒立走行ロボット及びその制御方法 | |
| JP4941226B2 (ja) | 倒立型移動体および倒立型移動体の制御方法 | |
| JP5133632B2 (ja) | 倒立型移動体 | |
| JP5092683B2 (ja) | 倒立車輪型移動体及びその制御方法 | |
| JP2009101817A (ja) | 倒立車輪型移動体及びその制御方法 | |
| JP4766159B2 (ja) | 倒立振子型移動体、及びその制御方法 | |
| JP2008229788A (ja) | 倒立型移動体 | |
| JP2013199215A (ja) | 車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090204 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100907 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100929 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110214 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110517 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110530 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140624 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |