JP4755490B2 - ブレ補正方法および撮像装置 - Google Patents
ブレ補正方法および撮像装置 Download PDFInfo
- Publication number
- JP4755490B2 JP4755490B2 JP2005352376A JP2005352376A JP4755490B2 JP 4755490 B2 JP4755490 B2 JP 4755490B2 JP 2005352376 A JP2005352376 A JP 2005352376A JP 2005352376 A JP2005352376 A JP 2005352376A JP 4755490 B2 JP4755490 B2 JP 4755490B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- target pixel
- pixel block
- vector
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/73—Deblurring; Sharpening
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/50—Image enhancement or restoration using two or more images, e.g. averaging or subtraction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/681—Motion detection
- H04N23/6811—Motion detection based on the image signal
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/682—Vibration or motion blur correction
- H04N23/683—Vibration or motion blur correction performed by a processor, e.g. controlling the readout of an image memory
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20021—Dividing image into blocks, subimages or windows
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Studio Devices (AREA)
- Image Analysis (AREA)
Description

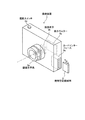
まず、本発明の実施の形態1にかかる撮像装置について説明する。図1は、この実施の形態1にかかる撮像装置の構成を示すブロック図である。また、図2は、この実施の形態1にかかる撮像装置の概要構成を示す斜視図である。図1に示すように、この実施の形態1にかかる撮像装置1は、被写体像を撮像して画像信号を生成する撮像部2と、撮像部2が生成した画像信号を処理する画像処理部3と、各種指示情報が入力される入力部4と、各種情報を表示する表示部5と、音声情報の入出力処理を行う音声入出力部6と、外部装置との間で情報通信を行う通信部7と、各種情報を記憶する記憶部8と、外部装置との間でデータの受け渡しを行うための携帯型記録媒体9と、撮像装置1の全体の処理および動作を制御する制御部Cとを備える。撮像部2、画像処理部3、入力部4、表示部5、音声入出力部6、通信部7、記憶部8および携帯型記録媒体9は、制御部Cに電気的に接続され、制御部Cは、これらの各構成部位を制御する。
X’=T・X+S ・・・(1)
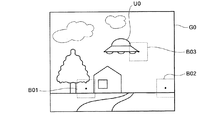
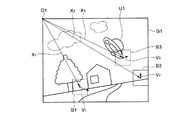
ここで、アフィン変換前後の図形の対応する任意の点を示す位置ベクトルをそれぞれXおよびX’とし、アフィン変換の線形変換部分を示す変換係数であるマトリックスをTとし、アフィン変換のシフト変換部分を示す変換係数であるベクトルをSとしている。ただし、図3−2に示すようにシフトおよび回転からなる画像のブレの場合、線形変換を示すマトリックスTは、回転角がφである反時計回りの回転変換を示す回転マトリックスR(φ)に置き換えることができる。なお、対象画像G1および基準画像G0の一部の被写体は、基準画像G0中の被写体像U0と対象画像G1中の被写体像U1の関係に示すように、画像のブレとは別に位置および姿勢を変化させており、この変化は、アフィン変換によって補正されない。
Xc=(w1・X1+w2・X2+・・・+wn・Xn)/w ・・・(7)
Vc=(w1・V1+w2・V2+・・・+wn・Vn)/w ・・・(8)
また、回転マトリックスR(φ)は、次式(9)によって表わされる。
X’=R(φ)・X+{Xc−Vc−R(φ)・Xc} ・・・(11)
このアフィン変換では、画像処理部3は、座標原点O1を中心に対象画像G1を反時計周りに回転角φだけ回転し、この回転した対象画像G1をシフトベクトルS=Xc−Vc−R(φ)・Xcによってシフトする。
X’=(R(φ)・(X−Xc)+Xc)−Vc ・・・(12)
すなわち、式(11)に示したアフィン変換は、式(12)に示すように、位置重心ベクトルXcが示す各位置ベクトルXiの重み付き重心を中心に対象画像G1を反時計回りに回転角φだけ回転し、この回転した対象画像G1をベクトル(−Vc)によってシフトする変換に置き換えることができる。この場合、式(11)に示したアフィン変換の演算に比して、画像処理部3が行う演算を簡易にすることができ、画像処理部3の処理負荷を軽減して処理速度を向上させることができる。
X’=R(φ)・X−Vc ・・・(13)
wi=warea+(Vi・Vi)/k2 ・・・(15)
ただし、画素エリアAsに応じた重み付け係数をwareaとし、動きベクトルViの大きさを規格化する係数をkとしている。係数kは、動きベクトルViの大きさの最大値を画素数単位で想定した数値である。たとえば、動きの激しいスポーツ等を撮影する場合、動きベクトルViの大きさが大きくなる可能性が高いので係数kの値を大きく設定し、風景等を撮影する場合、動きベクトルViの大きさが大きくなる可能性が低いので係数kの値を小さく設定するようにすればよく、被写体に応じて適宜変更できるようにするとよい。
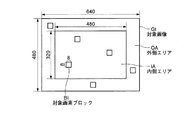
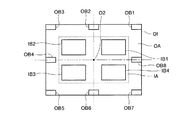
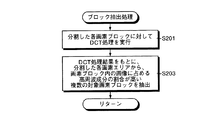
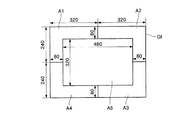
つぎに、本発明の実施の形態2について説明する。上述した実施の形態1では、対象画像を分割した各画素エリアAsから複数の対象画素ブロックBiを抽出し、画像のブレに対応するアフィン変換の変換係数を高精度に演算するようにしていたが、この実施の形態2では、対象画像の4つの隅領域から2つの対象画素ブロックBiを抽出し、簡易かつ高速にアフィン変換の変換係数を演算するようにしている。
S=VS1 ・・・(18)
2 撮像部
2a 撮像光学系
2b 撮像素子
2c A/D変換部
3 画像処理部
3a 画像処理制御部
3b 画像選択部
3c 画素エリア分割部
3d 画素ブロック抽出部
3e 動きベクトル演算部
3f 重み設定部
3g 変換係数演算部
3h 画像補正演算部
3i フレームメモリ
4 入力部
4a 撮影スイッチ
5 表示部
5a 表示モニター
6 音声入出力部
7 通信部
8 記憶部
9 携帯型記録媒体
9a カードインターフェース
A1〜A4 画素エリア
B1〜B6,B01,B02,B03,Bi,BS1,BS2,IB1〜IB4,OB1〜OB8 画素ブロック
G0,G1,Gt 対象画像
O1,O2,Os 座標原点
V1〜V3,VS1,VS2 動きベクトル
X,X1〜X3 位置ベクトル
Claims (14)
- 撮像装置によって撮像された複数の画像の中から、画像のブレを補正する対象となる対象画像および該補正の基準となる基準画像を選択する画像選択ステップと、
前記対象画像から、画像の中央部に近い内寄りに位置する対象画素ブロックと、画像の周辺部に近い外寄りに位置する対象画素ブロックの2つの対象画素ブロックを少なくとも抽出するブロック抽出ステップと、
前記ブロック抽出ステップによって抽出された各対象画素ブロックの位置に対応する前記基準画像上の位置から該各対象画素ブロックの位置までの移動量を示す動きベクトルを演算するベクトル演算ステップと、
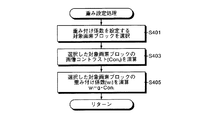
前記ベクトル演算ステップによって演算された各動きベクトルの前記画像のブレに対する信頼度をもとに、前記各対象画素ブロックの重み付け係数を設定する重み設定ステップと、
所定の座標原点を基準とした前記各対象画素ブロックの位置ベクトル、前記各動きベクトルおよび前記重み設定ステップによって設定された各重み付け係数をもとに、前記対象画像をアフィン変換するための変換係数を演算する係数演算ステップと、
前記係数演算ステップの演算結果をもとに前記対象画像をアフィン変換して該対象画像のブレを補正する補正演算ステップと、
を有し、
前記重み設定ステップは、
(a)前記各対象画像で内寄りに位置する画素ブロックの重み付け係数よりも前記各対象画像で外寄りに位置する対象画素ブロックの重み付け係数を大きく設定する、
(b)前記各対象画素ブロックの動きベクトルの大きさが大きいほど重み付け係数を大きく設定する、
(c)前記各対象ブロックのうち、前記アフィン変換における前記変換係数の線形変換成分およびシフト成分にそれぞれ対応する回転マトリックスおよびシフトベクトルの演算精度に対する重要度が高いほど重み付け係数を大きく設定する、
の何れかの手順に基づいて前記各対象画素ブロックの重み付け係数を設定することを特徴とするブレ補正方法。 - 前記係数演算ステップは、前記各対象画素ブロックに対応する前記各位置ベクトル、前記各動きベクトルおよび前記各重み付け係数をそれぞれXi(i=1,2,・・・,n)、Vi(i=1,2,・・・,n)およびwi(i=1,2,・・・,n)とし、該各重み付け係数の総和をwとした場合、前記各位置ベクトルの重み付き重心を示す位置重心ベクトルXcをXc=(w1・X1+w2・X2+・・・+wn・Xn)/wによって演算し、前記各動きベクトルの重み付き重心を示す動き重心ベクトルVcをVc=(w1・V1+w2・V2+・・・+wn・Vn)/wによって演算し、前記変換係数の線形変換成分に対応する回転マトリックスの回転角φを数式1によって演算することを特徴とする請求項1に記載のブレ補正方法。
- 前記係数演算ステップは、前記変換係数のシフト成分に対応するシフトベクトルSをS=Xc−Vcによって演算し、
前記補正演算ステップは、前記回転マトリックスによって前記位置ベクトルの重み付き重心を中心に前記回転角だけ反時計周りに前記対象画像を回転した後、前記シフトベクトルによって該対象画像をシフトすることを特徴とする請求項2に記載のブレ補正方法。 - 前記ブロック抽出ステップおよび前記重み設定ステップは、前記位置重心ベクトルがゼロベクトルとなるように、それぞれ前記対象画素ブロックを抽出し、前記重み付け係数を設定することを特徴とする請求項2または3に記載のブレ補正方法。
- 前記係数演算ステップは、前記回転角φだけ反時計回りに回転変換を行う前記回転マトリックスをR(φ)として、前記変換係数のシフト成分に対応するシフトベクトルSをS=R(−φ)・(Xc−Vc)−Xcによって演算し、
前記補正演算ステップは、前記シフトベクトルによって前記対象画像をシフトした後、前記回転マトリックスによって前記座標原点を中心に前記回転角だけ反時計方向に該対象画像を回転することを特徴とする請求項2に記載のブレ補正方法。 - 前記係数演算ステップは、前記各動きベクトルの大きさが所定値よりも小さい場合、数式1を近似した数式2によって前記回転角φを演算することを特徴とする請求項2に記載のブレ補正方法。
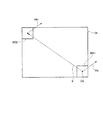
- 前記ブロック抽出ステップは、前記対象画像の各隅に位置する隅領域のうち異なる2つの該隅領域のそれぞれから前記対象画素ブロックを抽出し、
前記係数演算ステップは、前記2つの隅領域から抽出された対象画素ブロックのうち一方の対象画素ブロックの位置を前記座標原点とし、該座標原点に位置する前記対象画素ブロックに対応する前記位置ベクトル、前記動きベクトルおよび前記重み付け係数をそれぞれX1,V1およびw1とし、前記重み設定ステップによって、前記座標原点に位置する対象画素ブロックに対する前記重み付け係数および他方の対象画素ブロックに対する前記重み付け係数がそれぞれ1および0に限りなく近づけられた場合、数式1を近似した数式3によって前記回転角φを演算することを特徴とする請求項2に記載のブレ補正方法。
- 前記複数の画像は、動画像であり、
前記各対象画素ブロックは、前記動画像の圧縮符号化処理中に行われるフレーム間予測処理の処理対象となるブロックであり、
前記各動きベクトルは、前記フレーム間予測処理中に演算されることを特徴とする請求項2〜7のいずれか一つに記載のブレ補正方法。 - 被写体からの光を集光して被写体像を結像する撮像光学系と、
前記被写体像に対応する画像を撮像する撮像手段と、
前記撮像手段によって撮像された複数の画像の中から、画像のブレを補正する対象となる対象画像および該補正の基準となる基準画像を選択する画像選択手段と、
前記対象画像から、画像の中央部に近い内寄りに位置する対象画素ブロックと、画像の周辺部に近い外寄りに位置する対象画素ブロックの2つの対象画素ブロックを少なくとも抽出するブロック抽出手段と、
前記ブロック抽出手段によって抽出された各対象画素ブロックの位置に対応する前記基準画像上の位置から該各対象画素ブロックの位置までの移動量を示す動きベクトルを演算するベクトル演算手段と、
前記ベクトル演算手段によって演算された各動きベクトルの前記画像のブレに対する信頼度をもとに、前記各対象画素ブロックの重み付け係数を設定する重み設定手段と、
所定の座標原点を基準とした前記各対象画素ブロックの位置ベクトル、前記各動きベクトルおよび前記重み設定手段によって設定された各重み付け係数をもとに、前記対象画像をアフィン変換するための変換係数を演算する係数演算手段と、
前記係数演算手段の演算結果をもとに前記対象画像をアフィン変換して該対象画像のブレを補正する補正演算手段と、
を備え、
前記重み設定手段は、
(d)前記各対象画像で内寄りに位置する画素ブロックの重み付け係数よりも前記各対象画像で外寄りに位置する対象画素ブロックの重み付け係数を大きく設定する、
(e)前記各対象画素ブロックの動きベクトルの大きさが大きいほど重み付け係数を大きく設定する、
(f)前記各対象ブロックのうち、前記アフィン変換における前記変換係数の線形変換成分およびシフト成分にそれぞれ対応する回転マトリックスおよびシフトベクトルの演算精度に対する重要度が高いほど重み付け係数を大きく設定する、
の何れかの処理に基づいて前記各対象画素ブロックの重み付け係数を設定することを特徴とする撮像装置。 - 前記係数演算手段は、前記各対象画素ブロックに対応する前記各位置ベクトル、前記各動きベクトルおよび前記各重み付け係数をそれぞれXi(i=1,2,・・・,n)、Vi(i=1,2,・・・,n)およびwi(i=1,2,・・・,n)とし、該各重み付け係数の総和をwとした場合、前記各位置ベクトルの重み付き重心を示す位置重心ベクトルXcをXc=(w1・X1+w2・X2+・・・+wn・Xn)/wによって演算し、前記各動きベクトルの重み付き重心を示す動き重心ベクトルVcをVc=(w1・V1+w2・V2+・・・+wn・Vn)/wによって演算し、前記変換係数の線形変換成分に対応する回転マトリックスの回転角φを数式4によって演算することを特徴とする請求項9に記載の撮像装置。
- 前記係数演算手段は、前記変換係数のシフト成分に対応するシフトベクトルSをS=Xc−Vcによって演算し、
前記補正演算手段は、前記回転マトリックスによって前記位置ベクトルの重み付き重心を中心に前記回転角だけ反時計周りに前記対象画像を回転した後、前記シフトベクトルによって該対象画像をシフトすることを特徴とする請求項10に記載の撮像装置。 - 前記ブロック抽出手段および前記重み設定手段は、前記位置重心ベクトルがゼロベクトルとなるように、それぞれ前記対象画素ブロックを抽出し、前記重み付け係数を設定することを特徴とする請求項10または11に記載の撮像装置。
- 前記係数演算手段は、前記各動きベクトルの大きさが所定値よりも小さい場合、数式4を近似した数式5によって前記回転角φを演算することを特徴とする請求項10に記載の撮像装置。
- 前記ブロック抽出手段は、前記対象画像の各隅に位置する隅領域のうち異なる2つの該隅領域のそれぞれから前記対象画素ブロックを抽出し、
前記係数演算手段は、前記2つの隅領域から抽出された対象画素ブロックのうち一方の対象画素ブロックの位置を前記座標原点とし、該座標原点に位置する前記対象画素ブロックに対応する前記位置ベクトル、前記動きベクトルおよび前記重み付け係数をそれぞれX1,V1およびw1とし、前記重み設定手段によって、前記座標原点に位置する対象画素ブロックに対する前記重み付け係数および他方の対象画素ブロックに対する前記重み付け係数がそれぞれ1および0に限りなく近づけられた場合、数式4を近似した数式6によって前記回転角φを演算することを特徴とする請求項10に記載の撮像装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005352376A JP4755490B2 (ja) | 2005-01-13 | 2005-12-06 | ブレ補正方法および撮像装置 |
| US11/320,454 US7773828B2 (en) | 2005-01-13 | 2005-12-28 | Method and device for stabilizing an image by applying an affine transform based on a weighted average of motion vectors |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005006771 | 2005-01-13 | ||
| JP2005006771 | 2005-01-13 | ||
| JP2005352376A JP4755490B2 (ja) | 2005-01-13 | 2005-12-06 | ブレ補正方法および撮像装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006222933A JP2006222933A (ja) | 2006-08-24 |
| JP4755490B2 true JP4755490B2 (ja) | 2011-08-24 |
Family
ID=36653318
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005352376A Expired - Fee Related JP4755490B2 (ja) | 2005-01-13 | 2005-12-06 | ブレ補正方法および撮像装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7773828B2 (ja) |
| JP (1) | JP4755490B2 (ja) |
Families Citing this family (86)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7471846B2 (en) | 2003-06-26 | 2008-12-30 | Fotonation Vision Limited | Perfecting the effect of flash within an image acquisition devices using face detection |
| US8989453B2 (en) | 2003-06-26 | 2015-03-24 | Fotonation Limited | Digital image processing using face detection information |
| US8896725B2 (en) | 2007-06-21 | 2014-11-25 | Fotonation Limited | Image capture device with contemporaneous reference image capture mechanism |
| US7565030B2 (en) | 2003-06-26 | 2009-07-21 | Fotonation Vision Limited | Detecting orientation of digital images using face detection information |
| US9692964B2 (en) | 2003-06-26 | 2017-06-27 | Fotonation Limited | Modification of post-viewing parameters for digital images using image region or feature information |
| US8682097B2 (en) | 2006-02-14 | 2014-03-25 | DigitalOptics Corporation Europe Limited | Digital image enhancement with reference images |
| US8155397B2 (en) | 2007-09-26 | 2012-04-10 | DigitalOptics Corporation Europe Limited | Face tracking in a camera processor |
| US7844076B2 (en) | 2003-06-26 | 2010-11-30 | Fotonation Vision Limited | Digital image processing using face detection and skin tone information |
| US7616233B2 (en) | 2003-06-26 | 2009-11-10 | Fotonation Vision Limited | Perfecting of digital image capture parameters within acquisition devices using face detection |
| US8593542B2 (en) | 2005-12-27 | 2013-11-26 | DigitalOptics Corporation Europe Limited | Foreground/background separation using reference images |
| US8330831B2 (en) | 2003-08-05 | 2012-12-11 | DigitalOptics Corporation Europe Limited | Method of gathering visual meta data using a reference image |
| US7792970B2 (en) | 2005-06-17 | 2010-09-07 | Fotonation Vision Limited | Method for establishing a paired connection between media devices |
| US8498452B2 (en) | 2003-06-26 | 2013-07-30 | DigitalOptics Corporation Europe Limited | Digital image processing using face detection information |
| US7574016B2 (en) | 2003-06-26 | 2009-08-11 | Fotonation Vision Limited | Digital image processing using face detection information |
| US7620218B2 (en) | 2006-08-11 | 2009-11-17 | Fotonation Ireland Limited | Real-time face tracking with reference images |
| US7440593B1 (en) | 2003-06-26 | 2008-10-21 | Fotonation Vision Limited | Method of improving orientation and color balance of digital images using face detection information |
| US7269292B2 (en) | 2003-06-26 | 2007-09-11 | Fotonation Vision Limited | Digital image adjustable compression and resolution using face detection information |
| US9129381B2 (en) | 2003-06-26 | 2015-09-08 | Fotonation Limited | Modification of post-viewing parameters for digital images using image region or feature information |
| US8948468B2 (en) | 2003-06-26 | 2015-02-03 | Fotonation Limited | Modification of viewing parameters for digital images using face detection information |
| US8645294B1 (en) * | 2004-02-03 | 2014-02-04 | Hrl Laboratories, Llc | Method for image registration utilizing particle swarm optimization |
| US8320641B2 (en) * | 2004-10-28 | 2012-11-27 | DigitalOptics Corporation Europe Limited | Method and apparatus for red-eye detection using preview or other reference images |
| US7315631B1 (en) | 2006-08-11 | 2008-01-01 | Fotonation Vision Limited | Real-time face tracking in a digital image acquisition device |
| KR100736041B1 (ko) * | 2005-06-30 | 2007-07-06 | 삼성전자주식회사 | 에러 은닉 방법 및 장치 |
| NZ571839A (en) * | 2006-03-29 | 2010-05-28 | Univ Curtin Tech | Testing surveillance camera installations |
| JP2007306106A (ja) * | 2006-05-09 | 2007-11-22 | Sony Corp | 撮像装置、撮像方法、およびプログラム |
| WO2008023280A2 (en) | 2006-06-12 | 2008-02-28 | Fotonation Vision Limited | Advances in extending the aam techniques from grayscale to color images |
| US7916897B2 (en) | 2006-08-11 | 2011-03-29 | Tessera Technologies Ireland Limited | Face tracking for controlling imaging parameters |
| US7403643B2 (en) | 2006-08-11 | 2008-07-22 | Fotonation Vision Limited | Real-time face tracking in a digital image acquisition device |
| US8055067B2 (en) | 2007-01-18 | 2011-11-08 | DigitalOptics Corporation Europe Limited | Color segmentation |
| JP2008219755A (ja) * | 2007-03-07 | 2008-09-18 | Fujifilm Corp | 手振れ判定装置、手振れ判定方法、プログラム及び撮像装置 |
| JP2009015749A (ja) * | 2007-07-09 | 2009-01-22 | Seiko Epson Corp | 画像表示装置、画像表示方法、およびプログラム |
| US8538195B2 (en) * | 2007-09-17 | 2013-09-17 | Raytheon Company | Hyperspectral image dimension reduction system and method |
| JP5052301B2 (ja) * | 2007-11-21 | 2012-10-17 | オリンパス株式会社 | 画像処理装置、画像処理方法 |
| JP5048542B2 (ja) * | 2008-02-07 | 2012-10-17 | オリンパス株式会社 | 画像処理装置及び画像処理プログラム |
| JP4940164B2 (ja) * | 2008-02-07 | 2012-05-30 | オリンパス株式会社 | 撮像装置及び撮像方法 |
| US20090201427A1 (en) * | 2008-02-12 | 2009-08-13 | Brian Heng | Method and system for pixel adaptive weighted median filtering for block motion vector decomposition |
| KR101442610B1 (ko) * | 2008-02-18 | 2014-09-19 | 삼성전자주식회사 | 디지털 촬영장치, 그 제어방법 및 제어방법을 실행시키기위한 프로그램을 저장한 기록매체 |
| US7924317B2 (en) * | 2008-03-12 | 2011-04-12 | Aptina Imaging Corporation | Method and apparatus for reducing motion blur in digital images |
| US8644642B2 (en) | 2008-04-30 | 2014-02-04 | Nec Corporation | Image quality evaluation method, system, and program based on an alternating-current component differential value |
| WO2009133900A1 (ja) * | 2008-04-30 | 2009-11-05 | 日本電気株式会社 | 画質評価システム、方法およびプログラム |
| WO2009150696A1 (ja) * | 2008-06-10 | 2009-12-17 | 富士通株式会社 | 画像補正装置および画像補正方法 |
| WO2009149601A1 (en) * | 2008-06-13 | 2009-12-17 | Shanghai Hewlett-Packard Co., Ltd | Processing a super-resolution target image |
| WO2010012448A2 (en) | 2008-07-30 | 2010-02-04 | Fotonation Ireland Limited | Automatic face and skin beautification using face detection |
| JP5029543B2 (ja) * | 2008-09-09 | 2012-09-19 | 富士通株式会社 | 符号化装置および符号化プログラム |
| US8238694B2 (en) * | 2008-10-03 | 2012-08-07 | Microsoft Corporation | Alignment of sharp and blurred images based on blur kernel sparseness |
| EP2175416A1 (en) * | 2008-10-13 | 2010-04-14 | Sony Corporation | Method and system for image deblurring |
| WO2010100677A1 (ja) * | 2009-03-05 | 2010-09-10 | 富士通株式会社 | 画像処理装置およびぶれ量算出方法 |
| US8379917B2 (en) | 2009-10-02 | 2013-02-19 | DigitalOptics Corporation Europe Limited | Face recognition performance using additional image features |
| CN102576464B (zh) * | 2009-10-22 | 2015-09-09 | 皇家飞利浦电子股份有限公司 | 对准来自标本的有序堆叠的图像 |
| US8179446B2 (en) * | 2010-01-18 | 2012-05-15 | Texas Instruments Incorporated | Video stabilization and reduction of rolling shutter distortion |
| KR101426417B1 (ko) * | 2010-02-05 | 2014-08-07 | 삼성테크윈 주식회사 | 영상 안정화 시스템 및 방법 |
| TW201136298A (en) * | 2010-04-12 | 2011-10-16 | Novatek Microelectronics Corp | Filter and filtering method for reducing image noise |
| JP2011233039A (ja) | 2010-04-28 | 2011-11-17 | Sony Corp | 画像処理装置、画像処理方法、撮像装置、およびプログラム |
| JP5543280B2 (ja) * | 2010-06-01 | 2014-07-09 | キヤノン株式会社 | 画像処理装置、画像処理方法 |
| CN102474573B (zh) | 2010-06-11 | 2016-03-16 | 松下电器(美国)知识产权公司 | 图像处理装置以及图像处理方法 |
| JP2012075088A (ja) * | 2010-09-03 | 2012-04-12 | Pentax Ricoh Imaging Co Ltd | 画像処理システムおよび画像処理方法 |
| US8849054B2 (en) | 2010-12-23 | 2014-09-30 | Samsung Electronics Co., Ltd | Digital image stabilization |
| US9031354B2 (en) | 2011-03-31 | 2015-05-12 | Raytheon Company | System and method for post-detection artifact reduction and removal from images |
| US9064308B2 (en) | 2011-04-13 | 2015-06-23 | Raytheon Company | System and method for residual analysis of images |
| US8675989B2 (en) | 2011-04-13 | 2014-03-18 | Raytheon Company | Optimized orthonormal system and method for reducing dimensionality of hyperspectral images |
| KR101773845B1 (ko) * | 2011-05-16 | 2017-09-01 | 삼성전자주식회사 | 휴대용 단말기에서 입력 처리 방법 및 장치 |
| US9036936B2 (en) * | 2011-06-20 | 2015-05-19 | Fujifilm Corporation | Image processing device, image processing method, and image processing program |
| JP2013041387A (ja) | 2011-08-15 | 2013-02-28 | Sony Corp | 画像処理装置、画像処理方法、撮像装置、電子機器、及び、プログラム |
| US8842937B2 (en) * | 2011-11-22 | 2014-09-23 | Raytheon Company | Spectral image dimensionality reduction system and method |
| US8810666B2 (en) * | 2012-01-16 | 2014-08-19 | Google Inc. | Methods and systems for processing a video for stabilization using dynamic crop |
| US8655091B2 (en) | 2012-02-24 | 2014-02-18 | Raytheon Company | Basis vector spectral image compression |
| KR101804215B1 (ko) * | 2012-03-06 | 2017-12-05 | 삼성전자주식회사 | 강건하게 비균일 모션 블러를 추정하는 방법 및 장치 |
| US9147265B2 (en) | 2012-06-04 | 2015-09-29 | Raytheon Company | System and method for rapid cluster analysis of hyperspectral images |
| US8660360B1 (en) | 2012-08-03 | 2014-02-25 | Raytheon Company | System and method for reduced incremental spectral clustering |
| JP6057629B2 (ja) * | 2012-09-07 | 2017-01-11 | キヤノン株式会社 | 画像処理装置、その制御方法、および制御プログラム |
| JP6253312B2 (ja) * | 2012-09-10 | 2017-12-27 | キヤノン株式会社 | 制御装置、制御装置を備えるアクチュエータ、画像振れ補正装置、交換用レンズ、撮像装置、及び自動ステージ |
| US8805115B2 (en) | 2012-11-02 | 2014-08-12 | Raytheon Company | Correction of variable offsets relying upon scene |
| WO2014075022A1 (en) * | 2012-11-12 | 2014-05-15 | Behavioral Recognition Systems, Inc. | Image stabilization techniques for video surveillance systems |
| KR101783990B1 (ko) * | 2012-12-21 | 2017-10-10 | 한화테크윈 주식회사 | 디지털 영상 처리 장치 및 영상의 대표 움직임 예측 방법 |
| JP2014225108A (ja) * | 2013-05-16 | 2014-12-04 | ソニー株式会社 | 画像処理装置、画像処理方法およびプログラム |
| KR102072014B1 (ko) * | 2013-09-16 | 2020-01-31 | 에스케이 텔레콤주식회사 | 영상 흔들림 보정을 이용한 영상 안정화 장치 및 방법 |
| TWI536319B (zh) * | 2014-06-24 | 2016-06-01 | 瑞昱半導體股份有限公司 | 去雜訊方法以及影像系統 |
| US9684970B2 (en) * | 2015-02-27 | 2017-06-20 | Qualcomm Incorporated | Fast adaptive estimation of motion blur for coherent rendering |
| CN106296578B (zh) * | 2015-05-29 | 2020-04-28 | 阿里巴巴集团控股有限公司 | 一种图像处理方法及装置 |
| JP6725979B2 (ja) * | 2015-11-27 | 2020-07-22 | キヤノン株式会社 | 像ブレ補正装置及びその制御方法、記憶媒体 |
| US9838594B2 (en) * | 2016-03-02 | 2017-12-05 | Qualcomm Incorporated | Irregular-region based automatic image correction |
| CN116233416A (zh) * | 2017-01-16 | 2023-06-06 | 世宗大学校产学协力团 | 影像编码/解码方法 |
| CN110211105B (zh) * | 2019-05-24 | 2021-09-07 | 厦门美柚股份有限公司 | 一种模糊图像检测方法、装置及系统 |
| EP3912556A1 (en) * | 2020-05-19 | 2021-11-24 | Koninklijke Philips N.V. | X-ray imaging system |
| CN114693532B (zh) * | 2020-12-28 | 2025-10-03 | 富泰华工业(深圳)有限公司 | 图像校正方法及相关设备 |
| JP2023062881A (ja) * | 2021-10-22 | 2023-05-09 | キヤノン株式会社 | 撮像装置およびその制御方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2595841B2 (ja) * | 1991-07-17 | 1997-04-02 | 松下電器産業株式会社 | 動き検出回路 |
| JP2989364B2 (ja) * | 1992-03-12 | 1999-12-13 | シャープ株式会社 | 画像処理装置及び画像処理方法 |
| US6205259B1 (en) * | 1992-04-09 | 2001-03-20 | Olympus Optical Co., Ltd. | Image processing apparatus |
| JP3279417B2 (ja) | 1993-12-27 | 2002-04-30 | オリンパス光学工業株式会社 | カメラ |
| US5923786A (en) * | 1995-07-17 | 1999-07-13 | Sony Corporation | Method and device for encoding and decoding moving images |
| JPH0937255A (ja) | 1995-07-19 | 1997-02-07 | Sony Corp | 動きパラメータ検出装置および動きパラメータ検出方法、並びに画像符号化装置 |
| JPH0998424A (ja) * | 1995-09-29 | 1997-04-08 | Matsushita Electric Ind Co Ltd | アフィン変換パラメータ抽出方法及び装置 |
| US5986668A (en) * | 1997-08-01 | 1999-11-16 | Microsoft Corporation | Deghosting method and apparatus for construction of image mosaics |
| JP3006560B2 (ja) | 1997-09-10 | 2000-02-07 | 日本電気株式会社 | 位置合わせ装置及び位置合わせプログラムを記録したコンピュータが読み取り可能な記録媒体 |
| US6597816B1 (en) * | 1998-10-30 | 2003-07-22 | Hewlett-Packard Development Company, L.P. | Correcting distortion in an imaging system using parametric motion estimation |
| JP2000161913A (ja) | 1998-12-01 | 2000-06-16 | Philips Japan Ltd | 複数の物体を相互に位置合わせする方法及び装置 |
| JP2000224462A (ja) * | 1999-02-02 | 2000-08-11 | Minolta Co Ltd | カメラシステム |
| US6628711B1 (en) * | 1999-07-02 | 2003-09-30 | Motorola, Inc. | Method and apparatus for compensating for jitter in a digital video image |
| JP2003018604A (ja) * | 2001-07-04 | 2003-01-17 | Matsushita Electric Ind Co Ltd | 画像信号符号化方法、画像信号符号化装置および記録媒体 |
| US7221776B2 (en) * | 2001-10-31 | 2007-05-22 | Arcsoft, Inc. | Video stabilizer |
| JP2004015376A (ja) * | 2002-06-06 | 2004-01-15 | Canon Inc | 像振れ防止装置およびカメラ |
| EP1377040A1 (en) * | 2002-06-19 | 2004-01-02 | STMicroelectronics S.r.l. | Method of stabilizing an image sequence |
-
2005
- 2005-12-06 JP JP2005352376A patent/JP4755490B2/ja not_active Expired - Fee Related
- 2005-12-28 US US11/320,454 patent/US7773828B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006222933A (ja) | 2006-08-24 |
| US20060153472A1 (en) | 2006-07-13 |
| US7773828B2 (en) | 2010-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4755490B2 (ja) | ブレ補正方法および撮像装置 | |
| US8411154B2 (en) | Image processing apparatus for calculating global motion vector of plurality of image frames | |
| CN102439966B (zh) | 图像处理设备和方法 | |
| JP6106921B2 (ja) | 撮像装置、撮像方法および撮像プログラム | |
| JP5720275B2 (ja) | 撮像装置および撮像方法 | |
| US20110096143A1 (en) | Apparatus for generating a panoramic image, method for generating a panoramic image, and computer-readable medium | |
| US8965105B2 (en) | Image processing device and method | |
| US12002279B2 (en) | Image processing apparatus and method, and image capturing apparatus | |
| US10013632B2 (en) | Object tracking apparatus, control method therefor and storage medium | |
| JP6491581B2 (ja) | 画像処理装置およびその制御方法ならびにプログラム | |
| CN100487522C (zh) | 模糊校正方法及摄像装置 | |
| US20140028894A1 (en) | Digital photographing apparatus and method of controlling same | |
| JP6564284B2 (ja) | 画像処理装置および画像処理方法 | |
| US10430660B2 (en) | Image processing apparatus, control method thereof, and storage medium | |
| JP6178646B2 (ja) | 撮像装置及び像振れ補正処理方法 | |
| KR20170034299A (ko) | 자세 추정 장치, 자세 추정 방법 및 기록 매체에 저장된 컴퓨터 프로그램 | |
| JP7690282B2 (ja) | 被写体追尾装置およびその制御方法 | |
| WO2015198478A1 (ja) | 画像歪み補正装置、情報処理装置および画像歪み補正方法 | |
| JP6099973B2 (ja) | 被写体領域追跡装置、その制御方法及びプログラム | |
| JP2017174094A (ja) | 画像処理装置、画像処理方法及びプログラム | |
| JP5353141B2 (ja) | プログラム、カメラ、画像処理装置、及び画像の合焦度算出方法 | |
| JP2022095312A (ja) | 撮像装置 | |
| JP6525693B2 (ja) | 画像処理装置及び画像処理方法 | |
| JP2015055988A (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| JP7278737B2 (ja) | 撮像装置及びその制御方法、並びにプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080903 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101019 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101026 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101224 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110524 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110527 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140603 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4755490 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140603 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |