JP4729337B2 - ジンバル機構を備えた転写装置及び同装置を用いる転写方法 - Google Patents
ジンバル機構を備えた転写装置及び同装置を用いる転写方法 Download PDFInfo
- Publication number
- JP4729337B2 JP4729337B2 JP2005132974A JP2005132974A JP4729337B2 JP 4729337 B2 JP4729337 B2 JP 4729337B2 JP 2005132974 A JP2005132974 A JP 2005132974A JP 2005132974 A JP2005132974 A JP 2005132974A JP 4729337 B2 JP4729337 B2 JP 4729337B2
- Authority
- JP
- Japan
- Prior art keywords
- mold
- frame
- gimbal
- movable body
- holding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
- Moulds For Moulding Plastics Or The Like (AREA)
- Shaping Of Tube Ends By Bending Or Straightening (AREA)
Description
(A)被成形層は、上記紫外線硬化樹脂、熱可塑性樹脂のほか、いずれのものでもよい。被成形層の材料に応じてその軟化及び/又は硬化手段を選定することができる。
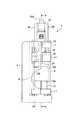
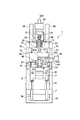
3 本体フレーム
5 上部フレーム(支持フレーム)
7 下部フレーム(ベースフレーム)
9 タイバ
10 固定台
11 可動テーブル
13 被成形品
15 支持台
19 可動体
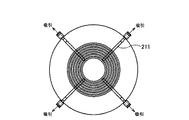
21 リニアガイド(案内手段)
23,24 スライダ(案内手段)
25 ボールネジ機構
26 ボールネジナット
27 ボールネジ軸
29 軸受
31 中空軸
33 サーボモータ
35 出力軸
41 型
42 紫外線光源
42A 光ファイバ
42B 反射ミラー
42C,43A 貫通穴
43 型支持プレート
45 ジンバル機構
46 ロードセル
47 旋回台
50 バランスシリンダ(バランス取り手段)
52 ピストンロッド
54 上カバー
56 下カバー
58 シリンダ
60 成形室
Claims (5)
- 成形材料が供給される成形用の基板を搭載するテーブルと、
同テーブル面に対向して配置された転写用の型を下面に固定保持する型保持体と、
前記型保持体を一方の面側に保持すると共に他方の面側に凸球面部を形成してなる第1のジンバル部材と、
前記第1のジンバル部材の凸球面部と対接する凹球面部を形成した第2のジンバル部材と、
前記第2のジンバル部材を保持し、前記テーブル面に対し上下方向に進退可能な可動体と、
前記可動体を上下方向に進退駆動せしめるサーボモータを含む可動体駆動手段と、
前記第1のジンバル部材の姿勢を調整保持するための姿勢調整及び保持手段とを有し、
前記姿勢調整及び保持手段は、前記第1のジンバル部材を前記第2のジンバル部材に向けて真空引きするため前記第2のジンバル部材内部に形成され且つ前記凹球面部に開口された真空引き用の管路と同真空引き用の管路に接続された真空引き装置を有し、
前記真空引き装置は、真空による吸引力を調整する調整手段を有し、
前記真空による吸引力の調整手段は、前記真空引き用の管路を増減自在に備えることにより真空度を調整する構成であることを特徴とするジンバル機構を備えた転写装置。 - 成形材料が供給される成形用の基板を搭載するテーブルと、
同テーブル面に対向して配置された転写用の型を下面に固定保持する型保持体と、
前記型保持体を一方の面側に保持すると共に他方の面側に凸球面部を形成してなる第1のジンバル部材と、
前記第1のジンバル部材の凸球面部と対接する凹球面部を形成した第2のジンバル部材と、
前記第2のジンバル部材を保持し、前記テーブル面に対し上下方向に進退可能な可動体と、
前記可動体を上下方向に進退駆動せしめるサーボモータを含む可動体駆動手段と、
前記第1のジンバル部材の姿勢を調整保持するための姿勢調整及び保持手段とを有するジンバル機構を備えた転写装置において、
略L字型のフレームと、
前記フレームのL字型の下部に一体的に設けられた下部フレームと、
前記下部フレームに一端を固着され、前記L字型の垂直部に互いに平行に伸びる複数のタイバと、
前記複数のタイバの他端に固着された上部フレームと、
前記下部フレームと前記上部フレームとの間にあって前記タイバに沿って移動自在に配置された前記可動体と、
前記フレームから前記可動体の左右両側面のほぼ中央位置まで突出したフレーム突出部と、
前記フレーム突出部と前記可動体の左右両側面のほぼ中央位置とを前記タイバに沿って移動自在に係合接続する案内手段と、
前記上部フレームに取り付けられ、前記可動体を前記案内手段に沿って移動させるための前記サーボモータを含む可動体駆動手段を有することを特徴とするジンバル機構を備えた転写装置。 - 成形材料が供給される成形用の基板を搭載するテーブルと、
同テーブル面に対向して配置された転写用の型を下面に固定保持する型保持体と、
前記型保持体を一方の面側に保持すると共に他方の面側に凸球面部を形成してなる第1のジンバル部材と、
前記第1のジンバル部材の凸球面部と対接する凹球面部を形成した第2のジンバル部材と、
前記第2のジンバル部材を保持し、前記テーブル面に対し上下方向に進退可能な可動体と、
前記可動体を上下方向に進退駆動せしめるサーボモータを含む可動体駆動手段と、
前記第1のジンバル部材の姿勢を調整保持するための姿勢調整及び保持手段とを有するジンバル機構を備えた転写装置を用いて転写を行なう方法であって、
前記可動体の下降中で前記型が前記基板に接触する直前の所定下降位置までは前記第1のジンバル部材の姿勢を保持し、前記所定下降位置に達したとき前記第1のジンバル部材の姿勢をフリー状態とし、且つ低速にして成形材料に対する成形動作を行なうことを特徴とする転写方法。 - 請求項3に記載の転写方法において、
前記第1のジンバル部材の姿勢を調整保持するための前記姿勢調整及び保持手段が前記第1のジンバル部材を前記第2のジンバル部材に真空吸引することからなり、前記第1のジンバル部材の姿勢保持は真空吸引を強くして吸着状態となし、当該姿勢のフリー状態は真空吸引を弱めることにより遂行されることを特徴とする転写方法。 - 本体フレームの一端側に備えられたベースフレームと、
前記ベースフレームに対向して前記本体フレームの他端側に備えられた支持フレームと、
前記ベースフレームと前記支持フレームとを一体的に連結した複数のタイバと、
前記本体フレームの左右両側に備えたガイドフレームの間に配置され、前記ベースフレームと前記支持フレームとの間において前記タイバに沿って移動自在な可動体と、
前記可動体の中心に対して対称的な位置を前記タイバに沿って移動する方向に案内するように前記両側のガイドフレームに備えられた案内手段と、
前記案内手段に沿って前記可動体を移動するために前記支持フレームに装着された駆動手段とを備え、
前記ベースフレーム又は前記可動体の一方に、転写用の型を保持する型保持体又は前記型により転写される被成形品を支持する支持台を、ジンバル機構を介して備え、
前記ベースフレーム又は前記可動体の他方に、前記ジンバル機構に装着した前記型保持体と対向する支持台又は前記ジンバル機構に装着した前記支持台と対向する型保持体を備えていることを特徴とする転写装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005132974A JP4729337B2 (ja) | 2005-04-28 | 2005-04-28 | ジンバル機構を備えた転写装置及び同装置を用いる転写方法 |
| US11/403,984 US7648354B2 (en) | 2005-04-28 | 2006-04-14 | Transfer apparatus having gimbal mechanism and transfer method using the transfer apparatus |
| TW095114106A TWI295623B (en) | 2005-04-28 | 2006-04-20 | Transfer apparatus having gimbal mechanism and transfer method using the transfer apparatus |
| DE102006019644.9A DE102006019644B4 (de) | 2005-04-28 | 2006-04-27 | Übertragungseinrichung mit einem Kardangelenkmechanismus und Übertragungsverfahren unter Verwendung der Übertragungseinrichtung |
| KR1020060037888A KR100747855B1 (ko) | 2005-04-28 | 2006-04-27 | 짐벌 기구를 구비한 전사 장치 및 전사 장치를 이용한 전사방법 |
| US12/633,183 US8318074B2 (en) | 2005-04-28 | 2009-12-08 | Transfer apparatus having gimbal mechanism and transfer method using the transfer apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005132974A JP4729337B2 (ja) | 2005-04-28 | 2005-04-28 | ジンバル機構を備えた転写装置及び同装置を用いる転写方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006305930A JP2006305930A (ja) | 2006-11-09 |
| JP2006305930A5 JP2006305930A5 (ja) | 2008-05-15 |
| JP4729337B2 true JP4729337B2 (ja) | 2011-07-20 |
Family
ID=37473367
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005132974A Active JP4729337B2 (ja) | 2005-04-28 | 2005-04-28 | ジンバル機構を備えた転写装置及び同装置を用いる転写方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4729337B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108962812B (zh) * | 2018-09-06 | 2023-06-27 | 重庆科技学院 | 一种旋转型芯片卡具的使用方法 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63261405A (ja) * | 1987-04-17 | 1988-10-28 | Sanyo Mach Works Ltd | 昇降位置決め装置 |
| JPH04319414A (ja) * | 1991-02-28 | 1992-11-10 | Philips Gloeilampenfab:Nv | 表面構造をもつ物体の製造方法及び装置 |
| JPH08259245A (ja) * | 1995-03-24 | 1996-10-08 | Olympus Optical Co Ltd | 光学素子成形装置の偏芯調整機構 |
| JP2001135634A (ja) * | 1999-11-10 | 2001-05-18 | Nippon Telegr & Teleph Corp <Ntt> | 薄膜形成装置 |
| JP2004103232A (ja) * | 2002-09-12 | 2004-04-02 | Komag Inc | パターン化されたメディア製造のためのディスク位置合わせシステム |
| JP2004291607A (ja) * | 2002-05-17 | 2004-10-21 | Konica Minolta Holdings Inc | 成形型ユニットの調整方法及び成形装置 |
| WO2004093171A1 (ja) * | 2003-04-11 | 2004-10-28 | Scivax Corporation | パターン形成装置、パターン形成方法 |
| JP2005052841A (ja) * | 2003-08-01 | 2005-03-03 | Meisho Kiko Kk | 高精度プレス機 |
| JP2005101201A (ja) * | 2003-09-24 | 2005-04-14 | Canon Inc | ナノインプリント装置 |
| JP2007296530A (ja) * | 2004-07-29 | 2007-11-15 | Scivax Kk | 傾き調整機能付きプレス装置、傾き調整機能付きパターン形成装置、型の傾き調整方法 |
-
2005
- 2005-04-28 JP JP2005132974A patent/JP4729337B2/ja active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63261405A (ja) * | 1987-04-17 | 1988-10-28 | Sanyo Mach Works Ltd | 昇降位置決め装置 |
| JPH04319414A (ja) * | 1991-02-28 | 1992-11-10 | Philips Gloeilampenfab:Nv | 表面構造をもつ物体の製造方法及び装置 |
| JPH08259245A (ja) * | 1995-03-24 | 1996-10-08 | Olympus Optical Co Ltd | 光学素子成形装置の偏芯調整機構 |
| JP2001135634A (ja) * | 1999-11-10 | 2001-05-18 | Nippon Telegr & Teleph Corp <Ntt> | 薄膜形成装置 |
| JP2004291607A (ja) * | 2002-05-17 | 2004-10-21 | Konica Minolta Holdings Inc | 成形型ユニットの調整方法及び成形装置 |
| JP2004103232A (ja) * | 2002-09-12 | 2004-04-02 | Komag Inc | パターン化されたメディア製造のためのディスク位置合わせシステム |
| WO2004093171A1 (ja) * | 2003-04-11 | 2004-10-28 | Scivax Corporation | パターン形成装置、パターン形成方法 |
| JP2005052841A (ja) * | 2003-08-01 | 2005-03-03 | Meisho Kiko Kk | 高精度プレス機 |
| JP2005101201A (ja) * | 2003-09-24 | 2005-04-14 | Canon Inc | ナノインプリント装置 |
| JP2007296530A (ja) * | 2004-07-29 | 2007-11-15 | Scivax Kk | 傾き調整機能付きプレス装置、傾き調整機能付きパターン形成装置、型の傾き調整方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006305930A (ja) | 2006-11-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8318074B2 (en) | Transfer apparatus having gimbal mechanism and transfer method using the transfer apparatus | |
| JP4500183B2 (ja) | 転写装置 | |
| KR100806231B1 (ko) | 가공장치, 가공방법 및 칩의 제조방법 | |
| US7448865B2 (en) | Transcript apparatus | |
| JP2009200345A (ja) | 加工装置 | |
| JP4701008B2 (ja) | ジンバル機構を備えた転写装置 | |
| JP2006326992A5 (ja) | ||
| JP5666082B2 (ja) | 転写装置およびプレス装置 | |
| JP4732801B2 (ja) | ジンバル機構を備えた転写装置及び同装置を用いた転写方法 | |
| JP4729337B2 (ja) | ジンバル機構を備えた転写装置及び同装置を用いる転写方法 | |
| JP4854313B2 (ja) | 転写装置における制御装置 | |
| JP4856941B2 (ja) | ジンバル機構を備えた転写装置及び同装置を用いる転写方法 | |
| JP2006326991A5 (ja) | ||
| JP2006305930A5 (ja) | ||
| JP4732800B2 (ja) | ジンバル機構を備えた転写装置及び同装置を用いた転写方法 | |
| JP5328869B2 (ja) | 転写用の型の製造方法 | |
| JP2006326980A5 (ja) | ||
| JP4857050B2 (ja) | ジンバル機構を備えた転写装置 | |
| JP5224930B2 (ja) | 転写装置 | |
| JP2008000945A (ja) | 転写用の型 | |
| JP2013048249A (ja) | 転写方法および転写装置 | |
| JP2019201183A (ja) | ステージ装置、リソグラフィ装置、および物品の製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080326 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080326 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110125 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110127 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110317 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110405 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110418 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4729337 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140422 Year of fee payment: 3 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |