JP4635771B2 - 印刷装置、スティックスリップ対応方法、プログラム、および印刷システム - Google Patents
印刷装置、スティックスリップ対応方法、プログラム、および印刷システム Download PDFInfo
- Publication number
- JP4635771B2 JP4635771B2 JP2005224573A JP2005224573A JP4635771B2 JP 4635771 B2 JP4635771 B2 JP 4635771B2 JP 2005224573 A JP2005224573 A JP 2005224573A JP 2005224573 A JP2005224573 A JP 2005224573A JP 4635771 B2 JP4635771 B2 JP 4635771B2
- Authority
- JP
- Japan
- Prior art keywords
- print head
- carriage
- motor
- stick
- control unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Landscapes
- Character Spaces And Line Spaces In Printers (AREA)
Description
(A)媒体に対して印刷を施す印刷ヘッドと、
(B)前記印刷ヘッドを移動させるためのモータと、
(C)前記印刷ヘッドを所定の方向に沿って案内するためのガイド部と、
(D)前記印刷ヘッドの移動速度を検出する速度検出部と、
(E)前記速度検出部により検出された前記移動速度に基づき、前記印刷ヘッドがスティックスリップ動作を行っているか否かを判定する判定部と、
(F)前記モータを制御するモータ制御部であって、
前記印刷ヘッドを前記ガイド部に沿って所定の速度以下にて定速移動させて目標停止位置にて停止させるべく前記モータを制御する際に、
前記印刷ヘッドを前記目標停止位置にて停止させるために前記モータに対して実行するブレーキ制御のブレーキ力は、前記印刷ヘッドがスティックスリップ動作を行っていると判定されなかったときよりも、前記印刷ヘッドがスティックスリップ動作を行っていると判定されたときの方が大きいモータ制御部と、
を備えたことを特徴とする印刷装置である。
本明細書及び添付図面の記載により、少なくとも以下の事項が明らかとなる。
(B)前記印刷ヘッドを移動させるためのモータと、
(C)前記印刷ヘッドを所定の方向に沿って案内するためのガイド部と、
(D)前記印刷ヘッドがスティックスリップ動作を行っているか否かを判定する判定部と、
(E)前記モータを制御するモータ制御部であって、
前記印刷ヘッドを前記ガイド部に沿って所定の速度以下にて定速移動させて目標停止位置にて停止させるべく前記モータを制御する際に、
前記印刷ヘッドを前記目標停止位置にて停止させるために前記モータに対して実行するブレーキ制御のブレーキ力が、前記判定部により前記印刷ヘッドがスティックスリップ動作を行っていると判定された場合と、前記判定部により前記印刷ヘッドがスティックスリップ動作を行っていると判定されていない場合とで異なるモータ制御部と、
(F)を備えたことを特徴とする印刷装置。
(B)前記印刷ヘッドを移動させるためのモータと、
(C)前記印刷ヘッドを所定の方向に沿って案内するためのガイド部と、
(D)前記印刷ヘッドがスティックスリップ動作を行っているか否かを判定する判定部と、
(E)前記モータを制御するモータ制御部であって、
前記印刷ヘッドを前記ガイド部に沿って所定の速度以下にて定速移動させて目標停止位置にて停止させるべく前記モータを制御する際に、
前記印刷ヘッドを前記目標停止位置にて停止させるために前記モータに対して実行するブレーキ制御のブレーキ力が、前記判定部により前記印刷ヘッドがスティックスリップ動作を行っていると判定された場合と、前記判定部により前記印刷ヘッドがスティックスリップ動作を行っていると判定されていない場合とで異なるモータ制御部と、
(F)を備え、
(G)前記判定部により前記印刷ヘッドがスティックスリップ動作を行っていると判定された場合の前記ブレーキ力が、前記判定部により前記印刷ヘッドがスティックスリップ動作を行っていると判定されていない場合に比べて大きく、
(H)前記印刷ヘッドの現在位置を検出するための位置検出部を備え、前記モータ制御部は、前記位置検出部の検出結果に基づき、前記モータを制御し、
(I)前記モータ制御部は、前記モータを制御するための制御信号を生成し、
(J)前記判定部は、前記制御信号に基づき、前記印刷ヘッドがスティックスリップ動作を行っているか否かを判定し、
(K)前記モータ制御部が前記印刷ヘッドを前記ガイド部に沿って所定の速度以下にて定速移動させて目標停止位置にて停止させるべく前記モータを制御する際とは、前記印刷ヘッドを当該印刷ヘッドに設けられた開口部を閉塞するキャッピング装置まで移動させる際であり、
(L)前記モータ制御部が前記印刷ヘッドを前記ガイド部に沿って所定の速度以下にて定速移動させて目標停止位置にて停止させるべく前記モータを制御する際とは、前記印刷ヘッドに設けられた光学センサにより、印刷しようとする媒体の幅を検出するために前記印刷ヘッドを前記ガイド部に沿って移動させる際であり、
(M)前記モータ制御部が前記印刷ヘッドを前記ガイド部に沿って所定の速度以下にて定速移動させて目標停止位置にて停止させるべく前記モータを制御する際とは、前記印刷ヘッドに搭載されたカートリッジを交換するために前記印刷ヘッドを所定位置まで移動させる際であり、
(N)前記印刷ヘッドは、前記媒体に対して印刷を施すために前記媒体に向けてインクを吐出するノズルを備えていることを特徴とする印刷装置。
前記印刷ヘッドがスティックスリップ動作を行っているか否かを判定するステップと、
前記印刷ヘッドを目標停止位置にて停止させるためのステップであって、
前記印刷ヘッドを前記目標停止位置にて停止させるために前記モータに対して実行するブレーキ制御のブレーキ力が、前記印刷ヘッドがスティックスリップ動作を行っていると判定された場合と、前記印刷ヘッドがスティックスリップ動作を行っていると判定されていない場合とで異なるステップと、
を有することを特徴とするスティックスリップ対応方法。
前記印刷ヘッドがスティックスリップ動作を行っているか否かを判定するステップと、
前記印刷ヘッドを目標停止位置にて停止させるためのステップであって、
前記印刷ヘッドを前記目標停止位置にて停止させるために前記モータに対して実行するブレーキ制御のブレーキ力が、前記印刷ヘッドがスティックスリップ動作を行っていると判定された場合と、前記印刷ヘッドがスティックスリップ動作を行っていると判定されていない場合とで異なるステップと、
を実行することを特徴とするプログラム。
前記印刷装置は、媒体に対して印刷を施す印刷ヘッドと、
前記印刷ヘッドを移動させるためのモータと、
前記印刷ヘッドを所定の方向に沿って案内するためのガイド部と、
前記印刷ヘッドがスティックスリップ動作を行っているか否かを判定する判定部と、
前記モータを制御するモータ制御部であって、前記印刷ヘッドを前記ガイド部に沿って所定の速度以下にて定速移動させて目標停止位置にて停止させるべく前記モータを制御する際に、前記印刷ヘッドを前記目標停止位置にて停止させるために前記モータに対して実行するブレーキ制御のブレーキ力が、前記判定部により前記印刷ヘッドがスティックスリップ動作を行っていると判定された場合と、前記判定部により前記印刷ヘッドがスティックスリップ動作を行っていると判定されていない場合とで異なるモータ制御部と、
を備えたことを特徴とする印刷システム。
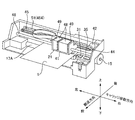
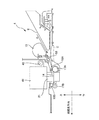
本発明に係る印刷装置の実施の形態について、インクジェットプリンタ1を例にして説明する。図1〜図4は、そのインクジェットプリンタ1を示したものである。図1は、そのインクジェットプリンタ1の外観を示す。図2は、そのインクジェットプリンタ1の内部構成を示す。図3は、そのインクジェットプリンタ1の搬送部の構成を示す。図4は、そのインクジェットプリンタ1のシステム構成を示す。
紙検知センサ53により検知された媒体Sは、搬送ローラ17Aによって、印刷が実施されるプラテン14へと順次搬送される。搬送ローラ17Aの対向位置には、フリーローラ18Aが設けられている。このフリーローラ18Aと搬送ローラ17Aとの間に、媒体Sを挟み込むことによって、媒体Sをスムーズに搬送する。
プラテン14へと送り込まれた媒体Sは、ヘッド21から吐出されたインクによって順次印刷される。プラテン14は、ヘッド21と対向して設けられ、印刷される媒体Sを下側から支持する。
印刷が施された媒体Sは、排紙ローラ17Bにより順次、プリンタ外部へと排出される。排紙ローラ17Bは、搬送モータ15と同期に駆動されていて、当該排紙ローラ17Bに対向して設けられたフリーローラ18Bとの間に媒体Sを挟み込んで、媒体Sをプリンタ外部へと排出する。
次にこのインクジェットプリンタ1のシステム構成について説明する。このインクジェットプリンタ1は、図4に示すように、バッファメモリ122と、イメージバッファ124と、コントローラ126と、メインメモリ127と、通信インターフェース129と、キャリッジモータ制御部128と、搬送制御部130と、ヘッド駆動部132とを備えている。
ヘッド駆動部132は、コントローラ126からの命令に従って、イメージバッファ124に格納された印刷データに基づき、ヘッド21に設けられた各色のノズルを駆動制御する。
なお、キャリッジモータ制御部128は、本実施形態では、キャリッジ41(ヘッド21)を移動させるためのキャリッジモータ42を制御することから、「モータ制御部」に相当する。
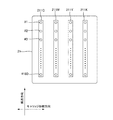
図5は、ヘッド21の下面部に設けられたインクのノズルの配列を示した図である。ヘッド21の下面部には、同図に示すように、イエロ(Y)、マゼンタ(M)、シアン(C)、ブラック(K)の各色ごとにそれぞれ複数のノズル♯1〜♯180からなるノズル列、即ちシアンノズル列211C、マゼンダノズル列211M、イエロノズル列211Y、およびブラックノズル列211Kが設けられている。
<エンコーダの構成>
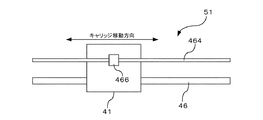
図6は、リニア式エンコーダ51の構成を概略的に示したものである。リニア式エンコーダ51は、リニア式エンコーダ符号板464と、検出部466とを備えている。リニア式エンコーダ符号板464は、図2に示すように、インクジェットプリンタ1内部のフレーム側に取り付けられている。一方、検出部466は、キャリッジ41側に取り付けられている。キャリッジ41がガイドレール46に沿って移動すると、検出部466がリニア式エンコーダ符号板464に沿って相対的に移動する。これによって、検出部466は、キャリッジ41の移動量を検出する。
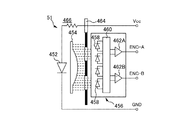
図7は、この検出部466の構成を模式的に示したものである。この検出部466は、発光ダイオード452と、コリメータレンズ454と、検出処理部456とを備えている。検出処理部456は、複数(例えば4個)のフォトダイオード458と、信号処理回路460と、例えば2個のコンパレータ462A、462Bとを有している。
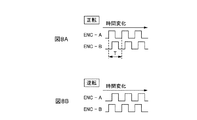
図8A及び図8Bは、キャリッジモータ42の正転時及び逆転時における検出部466の2つの出力信号の波形を示したタイミングチャートである。図8A及び図8Bに示すように、キャリッジモータ42の正転時及び逆転時のいずれの場合も、パルスENC−AとパルスENC−Bとは位相が90度だけ異なっている。キャリッジモータ42が正転しているとき、即ち、キャリッジ41がガイドレール46に沿って移動しているときは、図8Aに示すように、パルスENC−AはパルスENC−Bよりも90度だけ位相が進み、キャリッジモータ42が逆転しているときは、図8Bに示すように、パルスENC−AはパルスENC−Bよりも90度だけ位相が遅れる。そして、パルスENC−A及びパルスENC−Bの1周期Tは、キャリッジ41がリニア式エンコーダ符号板464のスリット間隔を移動する時間に等しい。
キャリッジモータ制御部128の構成について詳しく説明する。図9は、キャリッジモータ制御部128の回路構成の一例を示したブロック構成図である。キャリッジモータ制御部128は、同図に示すように、位置演算部331と、減算器332と、ゲイン333と、速度演算部334と、減算器335と、比例要素336Aと、積分要素336Bと、微分要素336Cと、加算器337と、PWM回路338と、加速制御部339Aと、タイマ339Bとを有する。
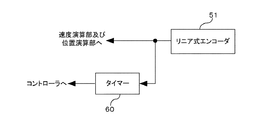
速度演算部334は、リニア式エンコーダ51の出力パルスのパルス周期を計測し、このパルス周期に基づいてキャリッジモータ42の回転速度Vcを演算する。なお、この速度演算部334は、「速度検出部」に相当する。
減算器335は、ゲイン333から出力される目標速度Vtと、速度演算部334により検出された検出速度Vcとの速度偏差ΔVを演算する。
QP(j)=ΔV(j)×Gp ………(1)
QI(j)=QI(j−1)+ΔV(j)×Gi ………(2)
QD(j)={ΔV(j)−ΔV(j−1)}×Gd ………(3)
加算器337は、比例要素336Aの比例成分QPと、積分要素336Bの積分成分QIと、微分要素336Cの微分成分QDとを加算する。これら3つの成分、即ち比例成分QP、積分成分QIおよび微分成分QDの加算結果ΣQは、デューティ信号として、PWM回路338に出力される。
加算結果ΣQは、次の式(4)により得ることができる。
ΣQ(j)=QP(j)+QI(j)+QD(j) ………(4)
PWM回路338は、加算器337の加算結果ΣQに応じた制御信号を生成する。ドライバ340は、この制御信号に基づいてキャリッジモータ42を駆動する。ドライバ340は、例えば複数個のトランジスタを備えており、PWM回路338からの制御信号に基づいて、トランジスタをオン・オフさせることで、キャリッジモータ42に電圧を印加する。
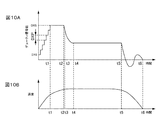
図10Aは、PWM回路338に入力されるデューティ信号の時間変化のグラフである。図10Bは、キャリッジモータ42の速度変化のグラフである。以下、これらの図を用いて、キャリッジモータ42の駆動について説明する。
次に前述したインクジェットプリンタ1の印刷動作について説明する。ここでは、「双方向印刷」を例にして説明する。図11は、インクジェットプリンタ1の印刷動作の処理手順の一例を示したフローチャートである。以下で説明される各処理は、コントローラ126が、メインメモリ127からプログラムを読み出して、当該プログラムに従って、キャリッジモータ制御部128や搬送制御部130、ヘッド駆動部132などを各々制御することにより実行される。
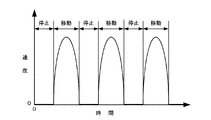
このようなインクジェットプリンタ1にあっては、長期間にわたり使用されなかったりした場合などに、キャリッジ41(印刷ヘッド)がガイドレール46に沿ってうまく滑らなくなり、キャリッジ41の移動速度が周期的に速くなったり遅くなったり、またキャリッジ41が動いたり停まったりする動作を繰り返す、いわゆるスティックスリップ動作(しゃくとり動作ともいう)を行ってしまうことがあった。
このようなスティックスリップ動作をキャリッジ41が行うのは、キャリッジモータ制御部128がキャリッジモータ42を介してキャリッジ41を所定の速度以下にて定速移動させようとした場合である。つまり、キャリッジ41が所定の速度を上回る速度にて定速移動する場合、即ち例えば、キャリッジ41が、印刷実行時等において非常に高速で移動する場合には、スティックスリップ動作はほとんど発生しない。ここでいう所定の速度とは、キャリッジ41がスティックスリップ動作を行う可能性のある上限の速度のことをいう。
キャリッジ41に搭載されたインクカートリッジ48(図2参照)がユーザー等により交換される場合である。インクカートリッジ48がユーザー等により交換される場合には、インクカートリッジ48がユーザー等により交換し易いように所定の位置までキャリッジ41を移動させる必要がある。この場合に、ユーザー等が不用意にキャリッジ41と接触しないようにするために、キャリッジ41を所定の速度以下にてゆっくりと低速移動させる必要がある。
キャリッジ41がキャッピング装置35(図2参照)が設けられた位置まで移動する場合である。印刷を行わないとき(待機時など)などには、ヘッド21のノズル♯1〜♯180の目詰まりを防止するために、キャリッジ41がキャッピング装置35の設置位置まで移動してヘッド21のノズル♯1〜♯180を封止する動作が行われる。このような場合に、キャリッジ41を所定の速度以下にてゆっくりと低速移動させる。
電源が投入されたときに、キャリッジ41がキャッピング装置35から離れて、印刷処理の実行準備、例えば、ヘッド21のノズル♯1〜♯180のクリーニング等を行うために、イニシャル動作を開始する。このような場合に、キャリッジ41を所定の速度以下にてゆっくりと低速移動させる。
キャリッジ41に設けられた光学センサ(図示外)により、インクジェットプリンタ1がこれから印刷しようとする媒体Sの幅を検出するために、キャリッジ41がガイドレール46に沿って移動する。このとき、媒体Sの幅を精度良く調べるために、キャリッジ41が所定の速度以下にてゆっくりと低速移動する。
このようなスティックスリップ動作をキャリッジ41が行った場合、キャリッジ41を目標停止位置にてスムーズに停止させることができず、ヘッド21が目標停止位置付近にて行ったり来たりするなどの不具合が発生することがあった。これによって、ユーザーが故障ではないかと不安に思う虞があった。このようなことから、ヘッド21がスティックスリップ動作を行ったときには、これを速やかに検知して、ヘッド21を目標停止位置にて停止させることができるように対応する必要がある。
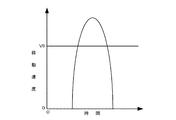
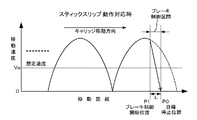
キャリッジ41の移動速度に基づき、キャリッジ41がスティックスティック動作を行ったか否か判定する。この判定方法の1つとして、キャリッジ41の移動速度が所定のしきい値V0を超えたときに、キャリッジ41がスティックスリップ動作を行っていると判定する方法がある。キャリッジ41がスティックスリップ動作を行った場合には、図13Aに説明するように、キャリッジ41の移動速度は、キャリッジ41が動き出すと、急激に上昇する。このときのキャリッジ41の移動速度は、本来のキャリッジ41の移動速度よりもずっと速い速度にまで達する。このことから、適当な所定のしきい値V0を設定して、キャリッジ41の移動速度が、この所定のしきい値V0を超えたか否かを調べることで、キャリッジ41がスティックスリップ動作を行ったか否か簡単にチェックすることができる。
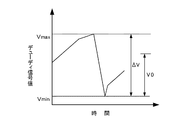
キャリッジモータ制御部128がキャリッジモータ42を制御するために生成する制御信号に基づき、キャリッジ41がスティックスリップ動作を行ったか否かを判定する。ここで、制御信号としては、例えば、キャリッジモータ制御部128のPWM回路338(図9参照)に入力されるデューティ信号に基づき判定をする。
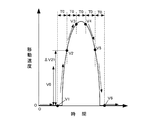
ここでは、キャリッジ41の加速度に基づき、キャリッジ41がスティックスリップ動作を行ったか否かを判定する。ここで、加速度は、キャリッジモータ制御部128の速度演算部334(図9参照)により取得する。つまり、速度演算部334は、リニア式エンコーダ51からの出力に基づき検出したキャリッジ41の移動速度を所定の時間間隔にて周期的に出力する。コントローラ126は、速度演算部334から周期的に送られてきたキャリッジ41の移動速度の差分からキャリッジ41の加速度を取得し、この差分に基づき、キャリッジ41がスティックスリップ動作を行ったか否かを判定する。
ここでは、キャリッジ41の移動開始から移動終了までの間に、キャリッジ41の移動速度が所定の許容下限値以下になった時間を計測するタイマーの計測時間に基づき、キャリッジ41がスティックスリップ動作を行ったか否かを判定する。
また、キャリッジ41がスティックスリップ動作を行ったか否かを判定する方法としては、これら(1)〜(4)以外の他の方法により実施しても良い。
本実施形態にかかるインクジェットプリンタ1では、このようにしてキャリッジ41がスティックスリップ動作を行っていると判定された場合に、キャリッジ41を目標停止位置にてスムーズに停止させることができるようにするために、次のような対応策を実行する。
ブレーキ制御とは、キャリッジ41を停止または減速させるための制御のことをいう。本実施形態では、キャリッジモータ制御部128は、生成する制御信号の信号値を小さくすることによりブレーキ制御を実施することになる。実際には、キャリッジ41が目標停止位置P0に近付くと、コントローラ126からの目標停止位置P0と、位置演算部331により検出された現在位置との位置偏差が減少して、図9にて説明したPWM回路338からドライバ340に制御信号として信号値の小さい制御信号または負の信号値の制御信号が出力されることになる。
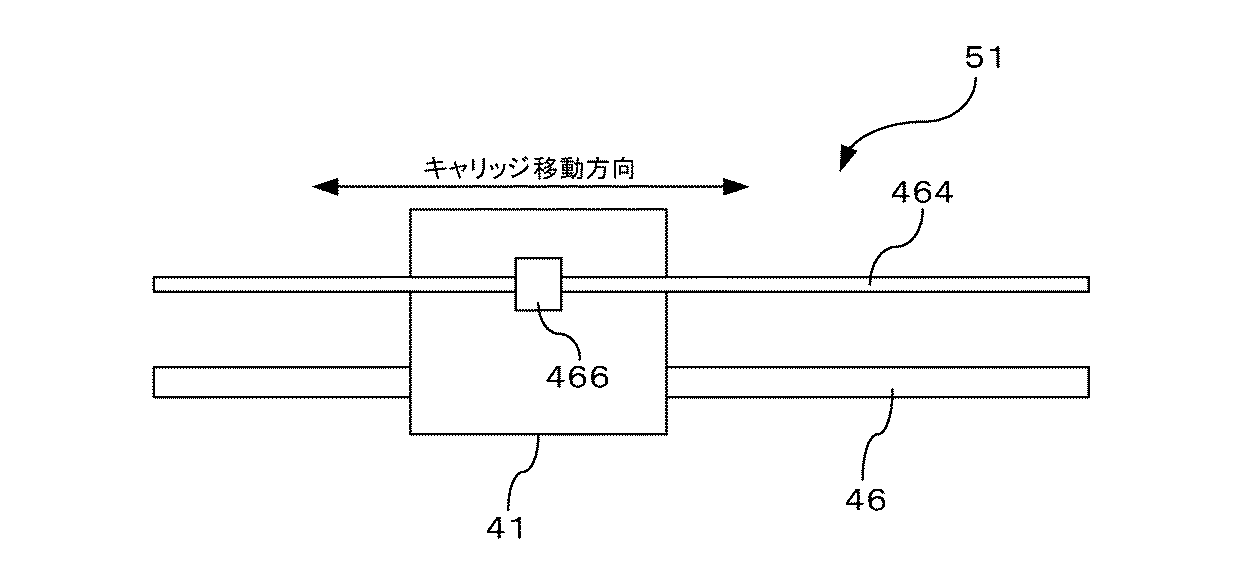
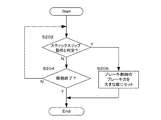
図20は、コントローラ126の対応処理の一例を説明したフローチャートである。コントローラ126は、キャリッジモータ制御部128がキャリッジ41を所定の速度以下にて定速移動させようとした際に、まず、キャリッジ41がスティックスリップ動作を行っていると判定されたか否かをチェックする(S202)。ここで、キャリッジ41がスティックスリップ動作を行っていると判定されていない場合には、コントローラ126は、次にステップS204へと進み、キャリッジ41の移動が終了したか否かをチェックする(S204)。
本実施形態にあっては、キャリッジ41がスティックスリップ動作を行っていると判定された場合には、キャリッジモータ制御部128がキャリッジモータ42に対して、キャリッジ41がスティックスリップ動作を行っていると判定されていない場合よりも大きなブレーキ力にてブレーキ制御を実行するから、キャリッジ41を停止させる際には、キャリッジ41を十分に減速させることができる。これにより、キャリッジ41を目標停止位置にて的確に停止させることができる。
図21は、キャリッジモータ制御部の他の構成例について説明したものである。このキャリッジモータ制御部350は、図21に示すように、通常速度制御部352と、低速制御部354と、制御選択部356と、PWM回路338とを備えている。ここで、通常速度制御部352は、キャリッジ41を通常速度で移動させるための制御部である。また、低速制御部354は、キャリッジ41を先に説明したように所定の速度以下にて低速移動させるための制御部である。これら通常速度制御部352および低速制御部354については、後で詳しく説明する。
ここで、通常速度制御部352は、例えば、図9にて説明したような、PID制御にてキャリッジモータ42の制御を行うような制御部により構成される。具体的には、例えば、図9に用いて説明したように、リニア式エンコーダ51の出力パルスに基づきキャリッジモータ42の回転位置を演算する位置演算部331と、コントローラ126から送られてくる目標停止位置と、位置演算部331により検出された検出位置との位置偏差を演算する減算器332と、減算器332から出力される位置偏差にゲインKpを乗算して目標速度Vtを出力するゲイン333と、リニア式エンコーダ51の出力パルスに基づきキャリッジモータ42の回転速度Vcを演算する速度演算部334と、ゲイン333から出力される目標速度Vtと、速度演算部334により検出された検出速度Vcとの速度偏差ΔVを演算する減算器335と、速度偏差ΔVに定数Gpを乗算し、比例成分QPを出力する比例要素336Aと、速度偏差に定数Giを乗算したものを積算し、積分成分QIを出力する積分要素336Bと、現在の速度偏差ΔV(j)(ここで、jは時刻を示す)と、1つ前の速度偏差ΔV(j−1)との差に定数Gdを乗算し、微分成分QDを出力する微分要素336Cと、これら各演算要素336A、336B、336Cの演算出力QP、QIおよびQDを加算する加算器337とを備えている。そして、この加算器337の加算結果が、図21に示すように、通常速度制御部352から出力されてPWM回路338に入力される。
図22は、低速制御部354の一例について説明したものである。この低速制御部354は、同図に示すように、ホールド制御部360と、タイマ割込制御部362と、エンコーダ割込制御部364と、周期カウンタ366と、位置カウンタ368と、制御選択部370と、タイマカウンタ372と、第一選択部374と、微分速度制御部376と、第二選択部378とを備えている。
このようなキャリッジモータ制御部350において、キャリッジ41を目標停止位置に停止させるときに実行するブレーキ制御のブレーキ力を大きくする場合には、低速制御部354のホールド制御部360から出力される信号が増幅されるように設定する。つまり、このキャリッジモータ制御部350では、キャリッジ41を目標停止位置に停止させる場合には、低速制御部354によりキャリッジモータ42を制御する。低速制御部354は、キャリッジ41を停止させる際に、ホールド制御部360によりキャリッジモータ42を制御することから、このホールド制御部360から出力される信号の信号値が増幅されるように設定することで、キャリッジを目標停止位置に停止させるためのブレーキ制御のブレーキ力を大きくすることができる。
次に、本発明に係る印刷システムの一実施形態として、印刷装置としてインクジェットプリンタ1を備えた場合を例に説明する。図23は、印刷システムの一実施形態の外観構成を示したものである。この印刷システム300は、コンピュータ140と、表示装置304と、入力装置306とを備えている。コンピュータ140は、パーソナルコンピュータなどをはじめとする各種コンピュータにより構成される。
以上、一実施形態に基づき、本発明に係るプリンタ等の印刷装置について説明したが、上記の実施の形態は、本発明の理解を容易にするためのものであり、本発明を限定して解釈するためのものではない。本発明は、その趣旨を逸脱することなく、変更または改良され得るとともに、本発明には、その等価物が含まれることは言うまでもない。特に、以下に述べる実施形態であっても、本発明に係る印刷装置に含まれるものである。
前述した実施の形態では、印刷ヘッド(ヘッド21)が、インクを吐出するノズル♯1〜♯180を有し、各ノズル♯1〜♯180からそれぞれインクを吐出して印刷をするようになっていたが、ここでいう印刷ヘッドにあっては、必ずしもこのようなヘッド21に限らない。つまり、媒体に対して印刷を施すのであれば、どのような形態の印刷ヘッドであっても構わない。
前述した実施の形態では、「モータ」としてキャリッジモータ42が、プーリ44と、タイミングベルト45とを介してキャリッジ41を移動させていたが、「印刷ヘッド」を移動させるための「モータ」にあっては、必ずしもこのようなモータに限らない。つまり、媒体に対して印刷を施す印刷ヘッドを移動させるためのモータであれば、どのようなモータであっても構わない。
前述した実施の形態では、印刷ヘッド(ヘッド21、キャリッジ41)を所定の方向に沿って案内する「ガイド部」として、印刷ヘッド(ヘッド21、キャリッジ41)を横方向に直線状に案内するガイドレール46が開示されていたが、「ガイド部」にあっては、必ずしもこのようなガイドレール46のみとは限らない。つまり、印刷ヘッド(ヘッド21、キャリッジ41)を所定の方向に沿って案内するためのガイド部であれば、どのようなタイプのガイド部であっても構わない。
前述した実施の形態では、「モータ制御部」としてキャリッジモータ制御部128を例にして、モータ(キャリッジモータ42)に対してPID制御を実行するモータ制御部について説明したが、ここでいう「モータ制御部」にあっては、必ずしもこのようなモータ制御部に限らない。つまり、「モータ」を制御する制御部であれば、モータを制御する制御方式はどのような方式であっても構わない。例えば、PID制御等以外の他の方式によりモータを制御するモータ制御部であっても構わない。
前述した実施の形態では、ブレーキ制御として、キャリッジモータ制御部128が制御信号として信号値の小さい制御信号を生成する制御方法や、制御信号として負の信号値の制御信号を生成する方法、この他に、ブレーキ機構(減速機構)等によりキャリッジ41の移動やキャリッジモータ42の回転駆動を外部から機械的に抑制する方法について説明したが、ブレーキ制御としては、これらの方法に限らない。キャリッジ41を停止させるための制御であれば、どのような方法であっても構わない。
前述した実施の形態では、印刷装置としては、前述したようなインクジェットプリンタ1の場合を例にして説明したが、このような印刷装置に限らず、他の方式によりインクを吐出するインクジェットプリンタであっても良い。
また、この他に、印刷装置としては、前述したインクジェットプリンタ1以外に、媒体に対して印刷を施し、かつ所定の方向に沿って移動可能に設けられた印刷ヘッドを備えた印刷装置であれば、どのようなタイプの印刷装置であっても構わない。
使用するインクについては、顔料インクであっても良く、また染料インクなど、その他各種インクであっても良い。
インクの色については、前述したイエロ(Y)、マゼンダ(M)、シアン(C)、ブラック(K)の他に、ライトシアン(LC)やライトマゼンダ(LM)、ダークイエロ(DY)をはじめ、例えば、レッドやバイオレット、ブルー、グリーンなど、その他の色のインクを使用しても良い。
媒体については、普通紙やマット紙、カット紙、光沢紙、ロール紙、用紙、写真用紙、ロールタイプ写真用紙等をはじめ、これらの他に、OHPフィルムや光沢フィルム等のフィルム材や布材、金属板材などであっても構わない。すなわち、印刷対象となり得るものであれば、どのような媒体であっても構わない。
5 操作ボタン、6 表示ランプ、7 排紙トレイ、8 給紙トレイ、
13 給紙ローラ、14 プラテン、15 搬送モータ、17A 搬送ローラ、
17B 排紙ローラ、18A フリーローラ、18B フリーローラ、
21 ヘッド、31 ポンプ装置、35 キャッピング装置、41 キャリッジ、
42 キャリッジモータ、44 プーリ、45 タイミングベルト、
46 ガイドレール、48 インクカートリッジ、49 カートリッジ装着部、
51 リニア式エンコーダ、53 紙検知センサ、60 タイマー、
122 バッファメモリ、124 イメージバッファ、126 コントローラ、
127 メインメモリ、128 キャリッジモータ制御部、
129 通信インターフェース、130 搬送制御部、132 ヘッド駆動部、
134 ロータリ式エンコーダ、140 コンピュータ、
211Y イエロノズル列、211C シアンノズル列、211M マゼンダノズル列、
211K ブラックノズル列、331 位置演算部、332 減算器、
333 ゲイン、334 速度演算部、335 減算器、336A 比例要素、
336B 積分要素、336C 微分要素、337 加算器、338 PWM回路、
339A 加速制御部、339B タイマ、340 ドライバ、
342 キャリッジモータ制御部、344 停止制御部、346 イナーシャ演算部、
348 周期計測部、350 キャリッジモータ制御部、352 通常速度制御部、
354 低速制御部、356 制御選択部、360 ホールド制御部、
362 タイマ割込制御部、364 エンコーダ割込制御部、366 周期カウンタ、
368 位置カウンタ、370 制御選択部、372 タイマカウンタ、
374 第一選択部、376 微分速度制御部、378 第二選択部、
452 発光ダイオード、454 コリメータレンズ、
456 検出処理部、458 フォトダイオード、460 信号処理回路、
462A コンパレータ、462B コンパレータ、
464 リニア式エンコーダ符号板、466 検出部
Claims (13)
- (A)媒体に対して印刷を施す印刷ヘッドと、
(B)前記印刷ヘッドを移動させるためのモータと、
(C)前記印刷ヘッドを所定の方向に沿って案内するためのガイド部と、
(D)前記印刷ヘッドの移動速度を検出する速度検出部と、
(E)前記速度検出部により検出された前記移動速度に基づき、前記印刷ヘッドがスティックスリップ動作を行っているか否かを判定する判定部と、
(F)前記モータを制御するモータ制御部であって、
前記印刷ヘッドを前記ガイド部に沿って所定の速度以下にて定速移動させて目標停止位置にて停止させるべく前記モータを制御する際に、
前記印刷ヘッドを前記目標停止位置にて停止させるために前記モータに対して実行するブレーキ制御のブレーキ力は、前記印刷ヘッドがスティックスリップ動作を行っていると判定されなかったときよりも、前記印刷ヘッドがスティックスリップ動作を行っていると判定されたときの方が大きいモータ制御部と、
を備えたことを特徴とする印刷装置。 - 前記印刷ヘッドの現在位置を検出するための位置検出部を備え、
前記モータ制御部は、前記位置検出部の検出結果に基づき、前記モータを制御することを特徴とする請求項1に記載の印刷装置。 - 前記モータ制御部は、前記モータを制御するための制御信号を生成することを特徴とする請求項1又は2に記載の印刷装置。
- 前記判定部は、前記制御信号に基づき、前記印刷ヘッドがスティックスリップ動作を行っているか否かを判定することを特徴とする請求項3に記載の印刷装置。
- 前記印刷ヘッドの加速度を検出する加速度検出部を備え、
前記判定部は、前記加速度検出部により検出された前記加速度に基づき、前記印刷ヘッドがスティックスリップ動作を行っているか否かを判定することを特徴とする請求項1〜3のいずれか1項に記載の印刷装置。 - 前記印刷ヘッドの移動開始から移動終了までの間に、前記印刷ヘッドの移動速度が所定の許容下限値以下になった時間を計測するタイマーを備え、
前記判定部は、前記タイマーの計測時間に基づき、前記印刷ヘッドがスティックスリップ動作を行っているか否かを判定することを特徴とする請求項1〜3のいずれか1項に記載の印刷装置。 - 前記モータ制御部が前記印刷ヘッドを前記ガイド部に沿って所定の速度以下にて定速移動させて目標停止位置にて停止させるべく前記モータを制御する際とは、前記印刷ヘッドを当該印刷ヘッドに設けられた開口部を閉塞するキャッピング装置まで移動させる際であることを特徴とする請求項1〜6のいずれか1項に記載の印刷装置。
- 前記モータ制御部が前記印刷ヘッドを前記ガイド部に沿って所定の速度以下にて定速移動させて目標停止位置にて停止させるべく前記モータを制御する際とは、前記印刷ヘッドに設けられた光学センサにより、印刷しようとする媒体の幅を検出するために前記印刷ヘッドを前記ガイド部に沿って移動させる際であることを特徴とする請求項1〜7のいずれか1項に記載の印刷装置。
- 前記モータ制御部が前記印刷ヘッドを前記ガイド部に沿って所定の速度以下にて定速移動させて目標停止位置にて停止させるべく前記モータを制御する際とは、前記印刷ヘッドに搭載されたカートリッジを交換するために前記印刷ヘッドを所定位置まで移動させる際であることを特徴とする請求項1〜8のいずれか1項に記載の印刷装置。
- 前記印刷ヘッドは、前記媒体に対して印刷を施すために前記媒体に向けてインクを吐出するノズルを備えていることを特徴とする請求項1〜9のいずれか1項に記載の印刷装置。
- (A)媒体に対して印刷を施す印刷ヘッドを当該印刷ヘッドを所定の方向に沿って案内するガイド部に沿って所定の速度以下にて定速移動させるべくモータを制御するステップと、
(B)前記印刷ヘッドの移動速度を検出するステップと、
(C)検出した前記移動速度に基づき、前記印刷ヘッドがスティックスリップ動作を行っているか否かを判定するステップと、
(D)前記印刷ヘッドを目標停止位置にて停止させるためのステップであって、
前記印刷ヘッドを前記目標停止位置にて停止させるために前記モータに対して実行するブレーキ制御のブレーキ力は、前記印刷ヘッドがスティックスリップ動作を行っていると判定されなかったときよりも、前記印刷ヘッドがスティックスリップ動作を行っていると判定されたときの方が大きいステップと、
を有することを特徴とするスティックスリップ対応方法。 - (A)媒体に対して印刷を施す印刷ヘッドを当該印刷ヘッドを所定の方向に沿って案内するガイド部に沿って所定の速度以下にて定速移動させるべくモータを制御するステップと、
(B)前記印刷ヘッドの移動速度を検出するステップと、
(C)検出した前記移動速度に基づき、前記印刷ヘッドがスティックスリップ動作を行っているか否かを判定するステップと、
(D)前記印刷ヘッドを目標停止位置にて停止させるためのステップであって、
前記印刷ヘッドを前記目標停止位置にて停止させるために前記モータに対して実行するブレーキ制御のブレーキ力は、前記印刷ヘッドがスティックスリップ動作を行っていると判定されなかったときよりも、前記印刷ヘッドがスティックスリップ動作を行っていると判定されたときの方が大きいステップと、
を実行することを特徴とするプログラム。 - コンピュータと、このコンピュータに接続可能な印刷装置とを具備した印刷システムで
あって、
前記印刷装置は、
媒体に対して印刷を施す印刷ヘッドと、
前記印刷ヘッドを移動させるためのモータと、
前記印刷ヘッドを所定の方向に沿って案内するためのガイド部と、
前記印刷ヘッドの移動速度を検出する速度検出部と、
前記速度検出部により検出された前記移動速度に基づき、前記印刷ヘッドがスティックスリップ動作を行っているか否かを判定する判定部と、
前記モータを制御するモータ制御部であって、前記印刷ヘッドを前記ガイド部に沿って所定の速度以下にて定速移動させて目標停止位置にて停止させるべく前記モータを制御する際に、前記印刷ヘッドを前記目標停止位置にて停止させるために前記モータに対して実行するブレーキ制御のブレーキ力は、前記印刷ヘッドがスティックスリップ動作を行っていると判定されなかったときよりも、前記印刷ヘッドがスティックスリップ動作を行っていると判定されたときの方が大きいモータ制御部と、
を備えたことを特徴とする印刷システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005224573A JP4635771B2 (ja) | 2005-08-02 | 2005-08-02 | 印刷装置、スティックスリップ対応方法、プログラム、および印刷システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005224573A JP4635771B2 (ja) | 2005-08-02 | 2005-08-02 | 印刷装置、スティックスリップ対応方法、プログラム、および印刷システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007038500A JP2007038500A (ja) | 2007-02-15 |
| JP4635771B2 true JP4635771B2 (ja) | 2011-02-23 |
Family
ID=37796924
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005224573A Expired - Fee Related JP4635771B2 (ja) | 2005-08-02 | 2005-08-02 | 印刷装置、スティックスリップ対応方法、プログラム、および印刷システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4635771B2 (ja) |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05124289A (ja) * | 1991-10-31 | 1993-05-21 | Canon Inc | 記録装置 |
| JPH05172240A (ja) * | 1991-12-20 | 1993-07-09 | Toyota Motor Corp | 車両用直結クラッチのジャダ検出装置 |
| JP3254624B2 (ja) * | 1996-05-31 | 2002-02-12 | 株式会社山武 | スティックスリップ検出方法および検出装置 |
| JPH10250184A (ja) * | 1997-03-13 | 1998-09-22 | Canon Inc | 記録装置 |
| JP2000201499A (ja) * | 1998-12-28 | 2000-07-18 | Canon Inc | 記録装置および記録方法 |
| JP2003191558A (ja) * | 2001-12-27 | 2003-07-09 | Seiko Epson Corp | 印刷装置及びキャリッジの制御方法 |
| JP4171886B2 (ja) * | 2002-11-29 | 2008-10-29 | セイコーエプソン株式会社 | キャリッジ速度制御装置、該キャリッジ速度制御装置を備えた液体噴射装置、キャリッジ速度制御プログラム |
-
2005
- 2005-08-02 JP JP2005224573A patent/JP4635771B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007038500A (ja) | 2007-02-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8235610B2 (en) | Printing apparatus and conveyance control method | |
| US6747429B2 (en) | Print control system, print control method, and recording medium having recorded print control program | |
| US8267401B2 (en) | Recording apparatus and transporting control method in recording apparatus | |
| US7222050B2 (en) | Apparatus for determining overheating of motor, method for determining overheating of motor, computer-readable medium, motor control apparatus, motor control method, and printing apparatus | |
| JP3570617B2 (ja) | Dcモータ制御装置及び制御方法 | |
| US7896565B2 (en) | Printing apparatus, method for coping with stick-slip, program product, and printing system | |
| JP4586665B2 (ja) | 印刷装置、スティックスリップ対応方法、プログラム、および印刷システム | |
| JP4635771B2 (ja) | 印刷装置、スティックスリップ対応方法、プログラム、および印刷システム | |
| US6967729B1 (en) | Control unit and method for controlling motor for use in printer, and storage medium storing control program | |
| JP2007245476A (ja) | 印刷装置、スティックスリップ対応方法、プログラム、及び印刷システム | |
| JP4591277B2 (ja) | 印刷装置、スティックスリップ対応方法、プログラム、および印刷システム | |
| JP4586659B2 (ja) | 印刷装置、スティックスリップ対応方法、プログラム、および印刷システム | |
| JP4529819B2 (ja) | 印刷装置、スティックスリップ対応方法、プログラム、および印刷システム | |
| JP2006281553A (ja) | 印刷装置、スティックスリップ検知方法、プログラム、および印刷システム | |
| JP2006312285A (ja) | 印刷装置、スティックスリップ検知方法、プログラム、および印刷システム | |
| JP2006312286A (ja) | 印刷装置、スティックスリップ検知方法、プログラム、および印刷システム | |
| JP4552543B2 (ja) | モータの過熱判定装置、モータの過熱判定方法、モータの過熱判定プログラム、モータ制御装置、モータ制御方法及び印刷装置 | |
| JP2007253542A (ja) | 印刷装置、スティックスリップ対応方法、プログラム、及び印刷システム | |
| KR20080067862A (ko) | 잉크젯 프린터 및 그 제어방법 | |
| JP2006281554A (ja) | 印刷装置、スティックスリップ検知方法、プログラム、および印刷システム | |
| JP2007245422A (ja) | 印刷装置、スティックスリップ対応方法、プログラム、及び印刷システム | |
| JP2007245477A (ja) | 印刷装置、スティックスリップ対応方法、プログラム、及び印刷システム | |
| JP4577037B2 (ja) | 印刷装置、媒体検出方法および印刷システム | |
| JP7655045B2 (ja) | 制御システム | |
| JP3705061B2 (ja) | モータの制御装置およびその制御方法ならびにモータの制御プログラムを記録した記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080624 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100518 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100617 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100810 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101004 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101026 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101108 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |