JP4635720B2 - 車両用操舵装置 - Google Patents
車両用操舵装置 Download PDFInfo
- Publication number
- JP4635720B2 JP4635720B2 JP2005156236A JP2005156236A JP4635720B2 JP 4635720 B2 JP4635720 B2 JP 4635720B2 JP 2005156236 A JP2005156236 A JP 2005156236A JP 2005156236 A JP2005156236 A JP 2005156236A JP 4635720 B2 JP4635720 B2 JP 4635720B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- steered
- control
- operation input
- reaction force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Description
操作入力手段と反力アクチュエータを有する操舵部と、
操向輪と転舵アクチュエータを有する転舵部と、
前記操作入力手段から前記操向輪に至る操舵系の途中に設けられ、正常時に前記操作入力手段と前記操向輪とを機械的に切り離し、異常時に前記操作入力手段と前記操向輪とを機械的に連結するクラッチと、
正常時には、前記操作入力手段の操作量に応じて、前記反力アクチュエータと前記転舵アクチュエータの駆動制御を行う操舵制御手段と、
を備えた車両用操舵装置において、
前記反力アクチュエータの異常を検出する反力アクチュエータ異常検出手段を備え、
前記操舵制御手段は、前記反力アクチュエータの異常が検出されてから少なくとも異常と確定するまでの間、前記転舵アクチュエータへの制御指令を一定値に保持する保持転舵制御を実行し、前記反力アクチュエータの異常と確定した場合、前記操作入力手段の操作方向と前記操向輪の転舵方向とが一致しないときは、前記保持転舵制御を中止し、前記クラッチにより前記操作入力手段と前記操向輪とが機械的に連結されるまでの間、前記操作入力手段の操作量に基づき前記転舵アクチュエータを駆動制御して前記操向輪を転舵する連結時転舵制御を実行することを特徴とする。
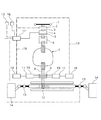
図1は、実施例1の車両用操舵装置が適用されたステア・バイ・ワイヤシステム(以下、「SBWシステム」という。)を示す全体構成図である。実施例1の車両用操舵装置は、(1)反力装置(操舵部)、(2)バックアップ装置、(3)転舵装置(転舵部)、(4)制御コントローラにより構成されている。以下、それぞれの構成を詳しく説明する。
反力装置は、ハンドル(操作入力手段)1と、操舵角センサ2と、コラムシャフト3と、反力モータ(反力アクチュエータ)4と、反力モータ角センサ5と、を有して構成されている。
反力装置(1)と転舵装置(3)とを機械的に分離・連結することを可能とするバックアップ装置は、ケーブルコラム7とクラッチ6により構成されている。
転舵装置は、ピニオンシャフト8と、ホイールギア9と、転舵モータ(転舵アクチュエータ)10,10と、転舵モータ角センサ11,11と、ステアリング機構12と、ラック軸力センサ13,13と、操向輪14,14により構成されている。
制御コントローラは、反力モータ4を駆動制御する反力コントローラ17と、転舵モータ10,10を駆動制御する転舵コントローラ18,18から構成され、双方向通信線19を介して情報交換可能に接続されている。
[反力モータ異常検出時の転舵制御処理]
図3は、実施例1の転舵コントローラ18で実行される反力モータ異常検出時の転舵制御処理の流れを示すフローチャートで、以下、各ステップについて説明する。
反力モータ4の異常発生時、ハンドル1の操作方向と操向輪14,14の転舵方向とが同相である場合には、図3のフローチャートにおいて、ステップS1→ステップS2→ステップS3→ステップS4→ステップS5→ステップS6→ステップS7→ステップS15→ステップS10→ステップS11へと進む流れとなる。よって、転舵角が、反力モータ異常確定時の転舵角に維持されるため、バックアップモードへ移行する過渡状態において、ドライバの操舵オーバーシュートおよびセルフアライニングトルクに起因するハンドル1と操向輪14,14との中立位置ずれを抑制でき、車両の軌跡がハンドル1に応じた走行ラインからずれるのを抑制できる。
一般的に、定常旋回時など、保舵状態で走行している際には、ドライバはハンドルに対し路面反力に釣り合うトルクを受動的にかけることにより、保舵状態を維持している。この状態で反力モータおよびその制御装置(反力コントローラ)の異常を検知し、反力モータ電流を遮断して反力モータの出力トルクがゼロになると、ハンドルは異常発生の直前にドライバがかけていたトルクにより、切り増し方向に動くことになる。これにより、ドライバの意図しない操舵オーバーシュートが発生する。
一方、図5に示すように、操舵角と転舵角との間に位相差が発生するような操舵を行っている状況(以下、操舵状態と呼ぶ)で走行している際に、反力モータおよびその制御装置に異常が発生すると、反力モータの発生するトルクがゼロになり、また、操向輪に関してはクラッチが完全に連結するまでの間はセルフアライニングトルクにより直進方向に戻される。つまり、操向輪はドライバの意図であるハンドル操作と連動すること無しに動作することになり、ドライバに違和感を与える上、車両の軌跡が走行ラインから大きくずれてしまう。すなわち、操舵状態においては、ドライバのハンドルを切った方向に操向輪を転舵させる制御を行う方が望ましい。
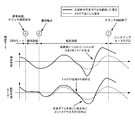
そこで、反力モータおよびその制御装置が何かしらの失陥をした場合、その制御装置により失陥を検知したと同時に転舵モータを現在の位置に保持する制御を行う(以下、保持転舵制御と呼ぶ)。これを実現する方法としては、例えば、図6のように、転舵モータ指令角を反力失陥時の値に固定する方法がある。この制御を行った場合、保舵状況で走行しているとき、反力モータの異常を検出し、バックアップモードへ移行する際、反力モータの発生トルクがゼロになるので、ハンドルが切り増し方向に動いてしまう(ハンドルを切っている方向と操向輪の向いている方向が同相)が、操向輪については、保持転舵制御を行うことによってハンドルの操作の如何にかかわらず、反力モータ異常検出時の転舵角に保持されるため、変位量は減少し、車両の軌跡も走行ラインからずれることがなくなる。
しかし、操舵状態で走行しているときには、操舵角と転舵角との間に位相差があるので、ハンドルを切っている方向と操向輪の向いている方向とが逆相となる状況が起こり得る。そういった状況下で反力モータの異常を検出し、バックアップモードへ移行する際、操向輪の保持転舵制御を行うと、ハンドルを切っている方向と車両の進む方向とが異なることとなり、走行ラインから車両の軌跡がずれてしまう。その上、ドライバの操舵意図が操向輪の転舵と連動していないため、違和感を与えることになる(図7)。
この問題を解決するために、反力モータおよびその制御装置の異常を検出し、バックアップモードへ移行する際の過渡状態において、クラッチを締結する指令を出してから完全に締結するまでのある一定時間は、正常時制御と同様に、操舵角に応じた転舵角制御を継続する制御を行う(以下、連結時転舵制御と呼ぶ)。この連結時転舵制御を行うことによって、操舵状態で走行しているときに反力モータおよびその制御装置の異常を検出し、バックアップモードへ移行する際に、転舵モータはハンドルの操舵角に応じて転舵されるため(反力モータの回転角が使える場合は使っても良い。)、操向輪の変位量および車両の軌跡が走行ラインからずれるのを最小限に抑えることができる(図9)。
ただし、連結時転舵制御を行った場合、保舵状態で走行しているときに反力モータおよびその制御装置の異常を検出し、バックアップモードへ移行する際に、ハンドルの切り増し分を操向輪の転舵角指令値として与えてしまうため、操向輪が内側へ切れ込み、結果車両の軌跡は内側へ巻き込んでしまう(図8)。
これに対し、実施例1の車両用操舵装置では、上記保持転舵制御と連結時転舵制御とを切り替え、操向輪14,14を保持させた方が望ましい状況では保持転舵制御を行い、ドライバがハンドル1を切った方向に操向輪14,14を転舵させた方が望ましい状況では連結時転舵制御を行うようにする。これにより、各々の状況において操向輪14,14の変位量および車両の軌跡のずれを最小限に抑えることが可能となる。保持転舵制御を行っている場合の時系列に沿った車両挙動は、図6に示した通りである。また、連結時転舵制御を行っている場合の時系列に沿った車両挙動は、図9に示した通りである。
実施例1の車両用操舵装置にあっては、以下に列挙する効果が得られる。
[反力モータ異常検出時の転舵制御処理]
図10は、実施例2の転舵コントローラ18で実行される反力モータ異常検出時の転舵制御処理の流れを示すフローチャートである。なお、図3に示した実施例1と同一処理を行うステップには、同一のステップ番号を付して説明を省略する。
SBWシステムでは、ハンドルの操舵角に対する操向輪の転舵角の比であるギア比を可変にすることが可能である。例えば、低速域では可変ギア比は1対1よりも高いギア比とし、少量のハンドル操作で大舵角を切ることができるという特徴がある。しかし、連結時転舵制御を行う場合、通常時の可変ギア比を用いると問題が発生する。バックアップモードへ移行する過渡状態において、クラッチは完全には繋がっていないものの、トルクの伝達は行われる。この状況において、可変ギア比で増速された転舵角指令によって転舵モータが駆動されると、クラッチを介してハンドルを切り増し方向に大きく動かすことになる。これにより大きな転舵角指令が送られ、転舵モータが駆動され、ハンドルはより大きく回されることになる(図11)。
実施例2では、バックアップモードへの移行状態においては、可変ギア比を変化させ、それをハンドル1の操舵角に乗じた値を転舵モータ指令角とする。ただし、この際の可変ギアの変化について、上記理由により反力モータ4およびその制御装置の異常検出時の値よりも小さな値とする。これにより、操舵状態におけるバックアップモード移行時、ハンドル1が大きく回されるという問題は解決される。
実施例2の車両用操舵装置にあっては、実施例1の効果(1),(2)に加え、以下に列挙する効果が得られる。
以上、本発明を実施するための最良の形態を、実施例1,2に基づいて説明したが、本発明の具体的な構成は、実施例1,2に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても本発明に含まれる。
2 操舵角センサ
3 コラムシャフト
4 反力モータ(反力アクチュエータ)
5 反力モータ角センサ
6 クラッチ
7 ケーブルコラム
8 ピニオンシャフト
9 ホイールギア
10,10 転舵モータ(転舵アクチュエータ)
11,11 転舵モータ角センサ
12 ステアリング機構
13,13 ラック軸力センサ
14,14 操向輪
15 車速センサ
16 ヨーレートセンサ
17 反力コントローラ
18,18 転舵コントローラ
19 双方向通信線
Claims (7)
- 操作入力手段と反力アクチュエータを有する操舵部と、
操向輪と転舵アクチュエータを有する転舵部と、
前記操作入力手段から前記操向輪に至る操舵系の途中に設けられ、正常時に前記操作入力手段と前記操向輪とを機械的に切り離し、異常時に前記操作入力手段と前記操向輪とを機械的に連結するクラッチと、
正常時には、前記操作入力手段の操作量に応じて、前記反力アクチュエータと前記転舵アクチュエータの駆動制御を行う操舵制御手段と、
を備えた車両用操舵装置において、
前記反力アクチュエータの異常を検出する反力アクチュエータ異常検出手段を備え、
前記操舵制御手段は、
前記反力アクチュエータの異常が検出されてから少なくとも異常と確定するまでの間、前記転舵アクチュエータへの制御指令を一定値に保持する保持転舵制御を実行し、
前記反力アクチュエータの異常と確定した場合、前記操作入力手段の操作方向と前記操向輪の転舵方向とが一致しないときは、前記保持転舵制御を中止し、前記クラッチにより前記操作入力手段と前記操向輪とが機械的に連結されるまでの間、前記操作入力手段の操作量に基づき前記転舵アクチュエータを駆動制御して前記操向輪を転舵する連結時転舵制御を実行する
ことを特徴とする車両用操舵装置。 - 請求項1に記載の車両用操舵装置において、
前記操舵制御手段は、前記反力アクチュエータの異常と確定した場合、前記操作入力手段の操作方向と前記操向輪の転舵方向とが逆相であるとき、前記連結時転舵制御を実行することを特徴とする車両用操舵装置。 - 請求項1または請求項2に記載の車両用操舵装置において、
前記操舵制御手段は、前記連結時転舵制御時、前記操作入力手段の操作量と、前記操作入力手段と前記操向輪とが機械的に連結されたときのギア比とに基づいて前記操向輪を転舵することを特徴とする車両用操舵装置。 - 請求項1または請求項2に記載の車両用操舵装置において、
前記操舵制御手段は、前記連結時転舵制御時、前記操作入力手段の操作量に基づき、前記操作入力手段と前記操向輪とのギア比を可変することを特徴とする車両用操舵装置。 - 請求項4に記載の車両用操舵装置において、
前記操舵制御手段は、前記連結時転舵制御時、前記操作入力手段と前記操向輪とが機械的に連結されたときのギア比に対し、前記操作入力手段の操作量に対して前記操向輪の転舵量が小さくなるようにギア比を可変することを特徴とする車両用操舵装置。 - 請求項4または請求項5に記載の車両用操舵装置において、
前記操舵制御手段は、前記連結時転舵制御時、前記操作入力手段の操作量と前記操向輪の転舵量とが機械的に連結されているときの関係に近づけるようにギア比を可変することを特徴とする車両用操舵装置。 - 操作入力手段と反力アクチュエータを有する操舵部と、
操向輪と転舵アクチュエータを有する転舵部と、
前記操作入力手段から前記操向輪に至る操舵系の途中に設けられ、正常時に前記操作入力手段と前記操向輪とを機械的に切り離し、異常時に前記操作入力手段と前記操向輪とを機械的に連結するクラッチと、
正常時には、前記操作入力手段の操作量に応じて、前記反力アクチュエータと前記転舵アクチュエータの駆動制御を行う操舵制御手段と、
を備えた車両用操舵装置において、
前記反力アクチュエータの異常を検出してから少なくとも異常と確定するまでの間、前記転舵アクチュエータへの制御指令を一定値に保持する保持転舵制御を実行し、
前記反力アクチュエータの異常と確定した場合、前記操作入力手段の操作方向と前記操向輪の転舵方向とが一致しないときは、前記保持転舵制御を中止し、前記クラッチにより前記操作入力手段と前記操向輪とが機械的に連結されるまでの間、前記操作入力手段の操作量に基づき前記操向輪を転舵する連結時転舵制御を実行する
ことを特徴とする車両用操舵装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005156236A JP4635720B2 (ja) | 2005-05-27 | 2005-05-27 | 車両用操舵装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005156236A JP4635720B2 (ja) | 2005-05-27 | 2005-05-27 | 車両用操舵装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006327503A JP2006327503A (ja) | 2006-12-07 |
| JP4635720B2 true JP4635720B2 (ja) | 2011-02-23 |
Family
ID=37549638
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005156236A Expired - Fee Related JP4635720B2 (ja) | 2005-05-27 | 2005-05-27 | 車両用操舵装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4635720B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5239245B2 (ja) * | 2007-07-27 | 2013-07-17 | 日産自動車株式会社 | 車両用操舵制御装置 |
| JP5310088B2 (ja) * | 2009-02-26 | 2013-10-09 | 日産自動車株式会社 | 車両用操舵装置、車両用操舵方法、車両用操舵装置付き車両 |
| JP6533772B2 (ja) | 2016-11-29 | 2019-06-19 | 本田技研工業株式会社 | 操舵装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001301639A (ja) * | 2000-04-24 | 2001-10-31 | Nissan Motor Co Ltd | 車両の操舵装置 |
| JP4114481B2 (ja) * | 2003-01-07 | 2008-07-09 | 日産自動車株式会社 | 車両用操舵制御装置 |
| JP2005096745A (ja) * | 2003-08-28 | 2005-04-14 | Nissan Motor Co Ltd | 車両用操舵装置 |
-
2005
- 2005-05-27 JP JP2005156236A patent/JP4635720B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006327503A (ja) | 2006-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5804198B2 (ja) | 車両の操舵制御装置及び操舵制御方法 | |
| US7664584B2 (en) | Steering control system | |
| EP1205371B1 (en) | Motor vehicle steering system | |
| EP1939069B1 (en) | Vehicle Steering Device and Control Method for Vehicle Steering Device | |
| EP1726511B1 (en) | Steering control | |
| JP4853053B2 (ja) | 車両用操舵制御装置 | |
| JP4884056B2 (ja) | 車両用操舵制御装置 | |
| US20160159388A1 (en) | Steering system for vehicle | |
| JP2017210213A (ja) | 車両用操舵装置 | |
| JP2005096745A (ja) | 車両用操舵装置 | |
| JP4506509B2 (ja) | 操舵制御装置 | |
| JP5239245B2 (ja) | 車両用操舵制御装置 | |
| JP5412822B2 (ja) | 車両用操舵制御装置 | |
| JP5076564B2 (ja) | 駆動制御装置およびそれを用いた操舵制御装置 | |
| JP4635720B2 (ja) | 車両用操舵装置 | |
| JP6140091B2 (ja) | 車両用操舵装置 | |
| JP2017001611A (ja) | ステアリング制御装置 | |
| JP7270463B2 (ja) | 車両用ステアリング装置 | |
| JP2006044378A (ja) | 車両用操舵装置 | |
| JP4517902B2 (ja) | 操舵制御装置 | |
| JP2004090783A (ja) | 車両用操舵装置 | |
| JP4243146B2 (ja) | 電動ステアリング装置におけるバッテリ状態判定装置 | |
| JP2005254982A (ja) | 車両用可変舵角装置 | |
| JP4436272B2 (ja) | 車両用操舵装置 | |
| JP4379250B2 (ja) | 車両用操舵装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080325 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100713 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100715 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100803 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101026 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101108 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4635720 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |