JP4628124B2 - 位置検出装置 - Google Patents
位置検出装置 Download PDFInfo
- Publication number
- JP4628124B2 JP4628124B2 JP2005029889A JP2005029889A JP4628124B2 JP 4628124 B2 JP4628124 B2 JP 4628124B2 JP 2005029889 A JP2005029889 A JP 2005029889A JP 2005029889 A JP2005029889 A JP 2005029889A JP 4628124 B2 JP4628124 B2 JP 4628124B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- output
- magnetic
- phase
- detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 title claims description 121
- 230000005291 magnetic effect Effects 0.000 description 108
- 230000000875 corresponding effect Effects 0.000 description 32
- 230000008859 change Effects 0.000 description 26
- 230000004044 response Effects 0.000 description 20
- 230000010363 phase shift Effects 0.000 description 19
- 230000008878 coupling Effects 0.000 description 18
- 238000010168 coupling process Methods 0.000 description 18
- 238000005859 coupling reaction Methods 0.000 description 18
- 239000011295 pitch Substances 0.000 description 7
- 239000000696 magnetic material Substances 0.000 description 6
- 230000007246 mechanism Effects 0.000 description 6
- 238000000034 method Methods 0.000 description 6
- 230000003111 delayed effect Effects 0.000 description 5
- 230000005284 excitation Effects 0.000 description 5
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 230000009467 reduction Effects 0.000 description 4
- 239000004020 conductor Substances 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 230000002194 synthesizing effect Effects 0.000 description 3
- 238000004804 winding Methods 0.000 description 3
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 229910052742 iron Inorganic materials 0.000 description 2
- 238000003786 synthesis reaction Methods 0.000 description 2
- 230000002596 correlated effect Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000005292 diamagnetic effect Effects 0.000 description 1
- 239000002889 diamagnetic material Substances 0.000 description 1
- 230000005674 electromagnetic induction Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
- 230000005428 wave function Effects 0.000 description 1
Images








Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Description
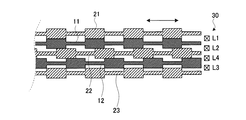
第1の磁性体部10は、軸方向に離隔して配置された複数(図の例では2個)第1の磁性体リング11,12で構成される。記第2の磁性体部20は、軸方向に離隔して配置された複数(図の例では3個)の第3の磁性体リング21,22,23で構成される。一方の各磁性体リング11,12の各々が他方の各磁性体リング21,22,23の間にそれぞれ配置されるような関係で、一方の取付リング6のスリーブ部分6aに挿入される。出力軸2とともに回転すべき第2の磁性体部20の各磁性体リング21,22,23は、後述するような所定の相互関係で取付リング6に固定される。
コイル部30は、図2に示すように組み立てられた状態の各磁性体リング21,11,22,12,23間の各境界部の周りに巻設される4つのコイルL1,L2,L3,L4からなる。すなわち、各コイルL1,L2,L3,L4は軸方向に適宜の間隔で離隔して配置され、各磁性体リング21,11,22,12,23間の4つの境界部の各々が対応するコイルL1〜L4の内部空間内に挿入される格好となっている。
このような配置のずれによって、入力軸1と出力軸2の相対的回転位置の変化に伴って、隣接する第1の磁性体リングと第2の磁性体リングの凹凸歯の対応が変化するとき、4つの各境界部での変化の位相がそれぞれ次のように異なるものもとなる。
A(θ)=P0+Psinθ
のような式で等価的に表せる。インピーダンス変化は負の領域に入らないため、上記式で、オフセット値P0は振幅係数Pよりも大きく(P0≧P)、「P0+Psinθ」は負の値をとらない。
前述のように、前記各磁性体リングの境界部の磁気結合の変化は、1/4サイクルづつ順にずれる。よって、磁性体リング11と22の境界部の磁気結合に応答する出力を生ずるコイルL2に生じる理想的なインピーダンス変化B(θ)は、
B(θ)=P0+Pcosθ
のようなコサイン関数特性の式で等価的に表せる。
C(θ)=P0−Psinθ
のようなマイナスサイン関数特性の式で等価的に表せる。
更に、磁性体リング22と12の境界部の磁気結合に応答する出力を生ずるコイルL4に生じる理想的なインピーダンス変化D(θ)は、
D(θ)=P0−Pcosθ
のようなマイナスコサイン関数特性の式で等価的に表せる。
なお、Pは1とみなして省略しても説明上不都合はないので、以下の説明ではこれを省略する。
Va=(P0+sinθ)sinωt
Vb=(P0+cosθ)sinωt
Vc=(P0−sinθ)sinωt
Vd=(P0−cosθ)sinωt
Va−Vc=(P0+sinθ)sinωt−(P0−sinθ)sinωt
=2sinθsinωt
アナログ演算器32は、下記のように、コサイン相に相当するコイルL2の出力電圧Vbと、それに対して差動変化するマイナスコサイン相に相当するコイルL4の出力電圧Vdとの差を求め、角度変数θのコサイン関数特性の振幅係数を持つ交流出力信号を生成する。
Vb−Vd=(P0+cosθ)sinωt−(P0−cosθ)sinωt
=2cosθsinωt
一方、シフト回路33から出力される交流信号sinθcosωtsと他方の交流出力信号cosθsinωtとをアナログ引算器36で引算合成することで、sin(ωt−θ)なる、θに応じてマイナス方向(遅相)に位相シフトされた交流信号(位相成分θを交流位相ずれに変換した信号)を生成する。そして、遅相シフトされた交流検出信号sin(ωt−θ)のゼロクロスをコンパレータ37で検出し、ゼロクロス検出パルスLmを生成する。
また、コンパレータ37から出力される遅相シフトのゼロクロス検出パルスLmは、遅相シフトされた交流検出信号sin(ωt−θ)における位相シフト量θつまり入力軸1と出力軸2との間の相対的回転位置を、基準交流信号sinωtのゼロ位相時点からの遅れ時間位置で示すタイミング信号に相当する。
図1におけるハンドル角検出装置4Bについて説明すると、外部ケース4内の所定位置に、複数のギアG1〜G3と、ステータ部100と、磁気応答部材300を含むロータ部200とからなる。複数のギアG1〜G3はハンドルに連結された入力軸2の回転を段階的に減少させてロータ部200を回転するためのギアリング機構であって、例えば出力軸2が5回転するとロータ部200を1回転するなどの比率で出力軸2の回転を減少してロータ部200に出力軸2の回転を伝達し、ハンドル(ステアリングシャフト)の多回転にわたる回転位置を1回転型アブソリュートセンサで検出しうるようにしている。
また、位相シフトタイプの回転位置検出手段の構成は、上述したものに限らず、どのような構成からなっていてもよい。例えば、1次コイルのみからなるタイプのものに限らず、1次及び2次コイルを有するタイプのものであってもよく、あるいはレゾルバ方式を用いてもよいし、あるいは基準交流信号としてサイン波sinωtとコサイン波cosωtの2相交流信号を用いる励磁方式であつてもよい。
2 出力軸
3 トーションバー
4 外部ケース
4A 相対回転位置検出装置(トルク検出装置)
4B ハンドル角度検出装置
10 第1の磁性体部
20 第1の磁性体部
11,12,21,22,23 磁性体リング
30 コイル部
L1〜L4(C1〜C4) コイル
100 ステータ部
200 ロータ部
G1〜G3 ギア
Claims (3)
- 基準交流信号によって励磁され、検出対象位置に対応する第1の関数値を振幅係数として振幅変調された第1の交流出力信号及び前記検出対象位置に対応する第2の関数値を振幅係数として振幅変調された第2の交流出力信号を出力する位置センサと、
前記第1及び第2の交流出力信号に基づき、前記検出対象位置に対応するシフト量だけ前記基準交流信号に対して正及び負の一方向にシフトされた電気的位相角を持つ第1の電気的交流信号と、同じ前記検出対象位置に対応するシフト量だけ前記基準交流信号に対して正及び負の他方向にシフトされた電気的位相角を持つ第2の電気的交流信号とを生成する回路と、
前記第1の電気的交流信号と前記第2の電気的交流信号との電気的位相差に対応するパルス幅を持つPWM信号を生成する回路であって、前記第1及び第2の電気的交流信号の前記基準交流信号に対する前記電気的位相角シフトが180度以内か否かを判別し、180度以内であれば該基準交流信号の1周期以内のパルス幅を持つ前記PWM信号を生成し、180度以上であれば該基準交流信号の1周期以上のパルス幅を持つ前記PWM信号を生成する前記回路と
を具備し、生成された前記PWM信号を検出出力として出力することを特徴とする位置検出装置。 - 前記位置センサと前記各回路とが前記位置検出装置の構造体内に組み込まれており、該構造体には、外部から前記基準交流信号を導入する端子又は配線が設けられ、かつ、前記PWM信号を外部に出力する端子又は配線が設けられていることを特徴とする請求項1に記載の位置検出装置。
- 前記位置センサと前記各回路とが前記位置検出装置の構造体内に組み込まれており、更に前記基準交流信号を生成するための回路が該構造体内に組み込まれており、かつ、該構造体には、前記PWM信号を外部に出力する端子又は配線が設けられていることを特徴とする請求項1に記載の位置検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005029889A JP4628124B2 (ja) | 2005-02-04 | 2005-02-04 | 位置検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005029889A JP4628124B2 (ja) | 2005-02-04 | 2005-02-04 | 位置検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006214948A JP2006214948A (ja) | 2006-08-17 |
| JP4628124B2 true JP4628124B2 (ja) | 2011-02-09 |
Family
ID=36978292
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005029889A Active JP4628124B2 (ja) | 2005-02-04 | 2005-02-04 | 位置検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4628124B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5237210B2 (ja) * | 2009-06-26 | 2013-07-17 | 株式会社アミテック | 位置検出装置 |
| JP5538758B2 (ja) * | 2009-06-26 | 2014-07-02 | 株式会社アミテック | 漏洩磁束検出型回転位置検出装置を組み込んだ液密サーボモータ装置 |
| GB2495908B8 (en) * | 2011-10-19 | 2017-06-14 | Vitec Group Plc | A camera support apparatus |
| KR102130675B1 (ko) * | 2018-07-27 | 2020-07-07 | 삼성전기주식회사 | 회전체 감지 장치 |
| US11054436B2 (en) | 2018-07-27 | 2021-07-06 | Samsung Electro-Mechanics Co., Ltd. | Apparatus for sensing rotating device |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000121390A (ja) * | 1998-10-12 | 2000-04-28 | Futaba Corp | 計測装置 |
| JP2002131084A (ja) * | 2000-10-24 | 2002-05-09 | Tadatoshi Goto | 位置検出装置 |
| JP2004309165A (ja) * | 2003-04-02 | 2004-11-04 | Koyo Seiko Co Ltd | トルクセンサ |
-
2005
- 2005-02-04 JP JP2005029889A patent/JP4628124B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000121390A (ja) * | 1998-10-12 | 2000-04-28 | Futaba Corp | 計測装置 |
| JP2002131084A (ja) * | 2000-10-24 | 2002-05-09 | Tadatoshi Goto | 位置検出装置 |
| JP2004309165A (ja) * | 2003-04-02 | 2004-11-04 | Koyo Seiko Co Ltd | トルクセンサ |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006214948A (ja) | 2006-08-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5863799B2 (ja) | 磁気多回転絶対位置検出装置 | |
| JP4390348B2 (ja) | 回転型位置検出装置 | |
| JP2988597B2 (ja) | 回転位置検出装置 | |
| US7999534B2 (en) | Rotation sensor with detection signal timing cycle features | |
| JP4628124B2 (ja) | 位置検出装置 | |
| JP5016165B2 (ja) | 相対回転位置検出装置 | |
| JP5522845B2 (ja) | 回転型位置検出装置 | |
| JP4740438B2 (ja) | シリンダ位置検出装置 | |
| JP4651540B2 (ja) | 相対回転位置検出装置 | |
| US7800359B2 (en) | Relative rotational position detection apparatus | |
| JPH11336713A (ja) | シリンダ位置検出装置 | |
| JP4336070B2 (ja) | 回転型位置検出装置 | |
| JP4828090B2 (ja) | 相対回転位置検出装置 | |
| JP3920896B2 (ja) | リニア位置検出装置 | |
| JP4532417B2 (ja) | 回転センサ | |
| JP2000055610A (ja) | ねじれ量検出装置 | |
| JP2001082914A (ja) | 角度検出装置 | |
| JP4441593B2 (ja) | 荷重計 | |
| JP5135277B2 (ja) | 回転型位置検出装置 | |
| JP2007187588A (ja) | 回転センサ | |
| JP5237210B2 (ja) | 位置検出装置 | |
| JP2005049180A (ja) | 相対回転位置検出装置 | |
| CN111969796A (zh) | 电机测速装置及电机 | |
| JP2007322229A (ja) | 誘導型位置検出装置 | |
| JP2001235377A (ja) | 相対的回転位置検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071128 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100419 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100518 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100716 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101012 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101109 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131119 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4628124 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |