JP4614512B2 - 適応性のある動き精度をもった動き推定方法 - Google Patents
適応性のある動き精度をもった動き推定方法 Download PDFInfo
- Publication number
- JP4614512B2 JP4614512B2 JP2000256484A JP2000256484A JP4614512B2 JP 4614512 B2 JP4614512 B2 JP 4614512B2 JP 2000256484 A JP2000256484 A JP 2000256484A JP 2000256484 A JP2000256484 A JP 2000256484A JP 4614512 B2 JP4614512 B2 JP 4614512B2
- Authority
- JP
- Japan
- Prior art keywords
- accuracy
- motion
- motion vector
- vector
- search
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/517—Processing of motion vectors by encoding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/117—Filters, e.g. for pre-processing or post-processing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/146—Data rate or code amount at the encoder output
- H04N19/147—Data rate or code amount at the encoder output according to rate distortion criteria
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/146—Data rate or code amount at the encoder output
- H04N19/149—Data rate or code amount at the encoder output by estimating the code amount by means of a model, e.g. mathematical model or statistical model
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/172—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a picture, frame or field
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/46—Embedding additional information in the video signal during the compression process
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/523—Motion estimation or motion compensation with sub-pixel accuracy
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/533—Motion estimation using multistep search, e.g. 2D-log search or one-at-a-time search [OTS]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/56—Motion estimation with initialisation of the vector search, e.g. estimating a good candidate to initiate a search
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/567—Motion estimation based on rate distortion criteria
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
- H04N19/61—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding in combination with predictive coding
Description
【発明の属する技術分野】
本発明は、ディジタル動画のビット圧縮又は符号化方法に適した適応性のある動き精度をもった動き推定方法に関し、より詳細には、動き補償動画像符号化装置において動きベクトルを推定して符号化する効果的な方法、並びに動き補償動画像復号装置においてその符号化データを復号する効果的な方法に関する。
【0002】
【従来の技術】
従来の動き推定方法において、符号化する現フレームを、“マクロブロック”と称する、例えば16×16ピクセルの同一サイズの画像ブロックに分割する。各現マクロブロック毎に、符号化器は、現マクロブロックに最も一致する、前に符号化されたフレーム(“参照フレーム”)内ブロックをサーチする。1個の現マクロブロックと参照フレーム内の最も一致するマクロブロック間の座標移動量は、マクロブロックの2次元ベクトル(“動きベクトル”)によって表現される。動きベクトルの各成分は画素単位で測定される。
【0003】
例えば、現マクロブロックに最も一致する参照マクロブロックが同一位置にある場合、静止背景画像が代表的な例であるように、現マクロブロックの動きベクトルは(0,0)である。最も一致する参照マクロブロックが、現マクロブロックの座標から右に2画素及び上に3画素の位置で発見された場合の動きベクトルは(2,3)である。かような動きベクトルは、水平成分X及び垂直成分Yが整数画素値を有しているので、整数画素(又は“整数ペル”又は“完全ペル”)の精度を有すると云う。図1において、ベクトルV1=(1,1)は、任意の現マクロブロックに対する完全ペルの動きベクトルを表わしている。
【0004】
動画シーン中の移動オブジェクトは、しかしながら、フレームからフレームへ整数画素増分単位では移動しない。真の動きは、X及びY方向に沿った実数値を取る。従って、現マクロブロックにより良く一致する参照マクロブロックは、前フレームをN×Nの因子(ファクタ)で補間し、次に補間したフレーム内の最も一致するマクロブロックをサーチすることにより発見できることがよくある。動きベクトルはXとYに沿って1/N画素の増分値を取ることができ、1/N画素(又は1/Nペル)の精度を有すると表現される。
【0005】
ITU電気通信標準化部門の“H.26L規格に対する提案呼びかけへの応答(Response to Call for Proposals for H.26L)”(Q.15/SG16,文書Q15−F−11,ソウル,1998年11月)及びITU電気通信標準化部門の“H.26L規格に対するTelenorの提案の強化(Enhancement of the Telenor Proposal for H.26L)”(Q.15/SG16,文書Q15−G−25,モントレー,1999年2月)において、Gisle Bjoitegaardは、動画符号化規格H.26L(“Telenor符号化器”)に関し1/3ペル精度の動きベクトルと立方体状補間法の使用を提案した。これを実施するために、Telenor符号化器は、立方体状補間フィルタを用いて参照フレームを3×3補間するか又は“アップサンプリング”する。この補間バージョンは、参照フレームの9倍のメモリを必要とする。1個の与えられたマクロブロックにおいて、Telenor符号化器は最適動きベクトルを2つのステップで推定する。即ち、符号化器は、先ず最適な整数ペルベクトルを探索し、次にV1に近い最適な1/3画素精度のベクトルV1/3を探索する。図1の例では、3×3補間参照フレーム内の(16×16画素)の全8ブロックを調べ、図示のように動きベクトルV1/3=(VX,VY)=(1+1/3,1)に関連するブロックである最も一致するブロックを見つけ出す。このTelenor符号化器は、幾つかの問題を有している。先ず、1/3ペル精度の動きベクトルを計算するために部分最適なファストサーチ戦略と複雑な立方体フィルタを(全段階において)使用することである。結果として、計算した動きベクトルは、最適ではなく、莫大な記憶容量と計算量を要し非常に高価につく。さらに、このTelenor符号化器は、1/3画素に固定した有効レート歪み判定基準による精度を用い、そのために、より良い動き精度を選択するようには適応できない。同様に、このTelenor符号化器の可変長符号(“VLC”)テーブルは、1/3画素に固定した精度を有しているので、異なる精度に対して適応できず異なる解釈ができない。
【0006】
最も良く知られている動画圧縮方法では、1/2画素精度で動きベクトルを推定して符号化するが、その理由は、従前の研究によれば、より高い又はより適応性を有する動き精度では計算が複雑になるだけで追加の圧縮利得が得られないことを示唆していたからである。しかしながら、これらの従前の研究は、最適化レート歪み判定基準を用いて動きベクトルを推定しておらず、計算の複雑化を減少させるためにかような基準の凸状特性を利用しておらず、動きベクトルと動きベクトルの精度を符号化する有効な戦略を用いていなかった。
【0007】
かような従前の研究の1つとして、Bernd Girodの論文(以後Girodの論文と略記する)“分数ペル精度による動き補償予測(Motion-Compensating Prediction with Fractional-Pel Accuracy)”(IEEE 通信会報,第41巻4号,604−612頁,1993年4月)が挙げられる。このGirodの論文は、動画符号化に部分画素(サブピクセル)の動き精度を用いる利点に関する最初の基本的な分析である。Girodは、部分画素空間における最適動きベクトルを探索するために簡単な階層戦略を用いた。彼はまた所与の精度に対する最適な動きベクトルを選択するために単純平均絶対差分(“MAD”)の基準を用いた。この最適精度は、理想化された仮定に基くために非実用的な公式を用いて選択され、非常に複雑であり、また、全ての動きベクトルは1フレーム内の同一精度を持つものに制限される。最後に、Girodは、予測誤差エネルギーにのみ注目し、動きベクトルを符号化するためのビットの使用法には言及しなかった。
【0008】
他の従前の研究として、Smita Gupta及びAllen Gershoの論文(以後“Guptaの論文”と略記する)“分数画素の動き推定(On Fractional Pixel Motion Estimation)”(SPIE VCIP会報,2094巻408−419頁,ケンブリッジ,1993年11月)が挙げられる。このGuptaの論文は、動画圧縮のために部分画素精度で動きベクトルを計算し選択して符号化する方法を提示している。Guptaの論文は、平均自乗誤差(“MSE”)と双線形補間に基づく公式を開示し、この公式を用いて理想的な動きベクトルを見つけ出し、かようなベクトルを所望の動き精度に量子化した。所与の精度に対する、この最適な動きベクトルは、部分最適MSE判定基準を用いて決定され、この最適精度は歪みビット当たりエネルギー差を最大限減少させる方法を用いて選択された。これは、渇望された(部分最適な)判定基準である。所与の動きベクトルの符号化は、最初に1/2ペル精度で符号化し、次に詳細化ビットでより高精度に符号化する方法で行われた。粗から微細への符号化は、かなりのビットを必要とするきらいがある。
【0009】
論文“ブロックに基づく動き補償動画符号化器の場合の最適動きベクトル精度(On the Optimal Motion Vector Accuracy for Block-Based Motion-Compensated Video Coders)”(IST/SPIE ディジタル動画の圧縮会報:アルゴリズムと技術,302−314頁,サンジョセ,1996年2月)(以後、Ribasの論文と略記する)において、Jordi Ribas−Corbera及びDavid L. Neuhoffは、動き精度のビットレートへの影響をモデル化し、ビットレートを最小にする最適精度を推定する幾つかの方法を提案した。このRibasの論文は、任意精度に対する動きベクトルを計算するためのフルサーチ方法を記述し、双線形補間のみを考慮した。最適な動きベクトルはMSEを最小にすることにより発見し、最適精度はレート歪みの最適化により導出された幾つかの公式を用いて選択した。動きベクトルと精度は、リアルタイム装置には実装が難しい、複雑なフレーム適応エントロピー符号化器を用いて符号化した。
【0010】
論文“より高いビットレートでの予測強化に関する新しいコア実験の提案(Proposal for a new core experiment on Prediction enhancement at higher bitrates)”(ISO/IEC JTC1/SC29/WG11動画及び音声の符号化、MPEG97/1827,セビリア,1997年2月)及び“1/4ペル動き補償のための複雑さを軽減した実装装置の性能評価(Performance Evaluatior of a Reduced Complexity Implemetatior for Quarter Pel Motion Compensatior)”(ISO/IEC JTC1/SC29/WG11動画及び音声の符号化,MPEG97/3146,サンジョセ、1998年1月)において、Urich Benzler は、動画シーケンスのために1/4ペル精度の動きベクトルの使用と、MPEG4動画符号化基準のさらに進んだ補間フィルタの使用を提案した。しかしながら、Benzlerは、1/4ペルの動きベクトルの発見にGirodのファストサーチ技法を用いた。Benzlerは、異なる補間フィルタを考慮しなかったが、第1段階で複合フィルタを使用して第2段階でより簡単なフィルタを使用することを提案し、一度に1つのマクロブロックを補間した。この方法は、多量のキャッシュメモリは必要としないが、複雑であり、全ての動きベクトルを1つのマクロブロック内の全ての可能なモード(例えば、16×16,4−8×8,16−4×4等)につき1/4ペル精度で計算して最適のモードを決定するために、計算量が多大である。BenzlerはMAD判定基準を使用して、全シーケンスに対し1/4ペル精度に固定した最適な動きベクトルを発見した。従って、最適な動き精度を選択する方法は示さなかった。最後に、Benzlerは、1/2及び1/4画素精度のベクトルを符号化するために使用可能な可変長符号(“VLC”)テーブルを用いて動きベクトルを符号化した。
【0011】
【発明が解決しようとする課題】
上述の参考文献は、最適化したレート歪み基準を用いて動きベクトルを推定しておらず、かような基準の凸状特性を利用して計算の複雑さを軽減していない。さらに、これらの参考文献は、動きベクトルと精度を符号化する有効な戦略を用いていない。
【0012】
【課題を解決するための手段】
本発明の1つの実施形態は、高画素精度(“分数”又は“部分画素”精度とも称される)の動きベクトルを僅かな計算量の増加で計算することにより従来技術の問題を解決する。
【0013】
本発明の戦略を用いると、動画符号化器はかなりの圧縮利得(例えば、動き精度の古典的な選択に比較して30%に達するビットレートの削減)を同等の計算レベルで達成できることが、実験により明らかになっている。動き精度に適応して計算し選択するので、本発明は適応動き精度(“AMA”)方式として記述できる。
【0014】
本発明の好ましい実施形態の1つは、部分画素(サブピクセル)空間におけるファストサーチ戦略を用いて最適な動きベクトルをスマートにサーチする。この技法は、1マクロブロックに対する最適な動きベクトルを発見することにより、動き補償動画符号化時の動きベクトルを推定する。第1ステップは、V1に中心をもつ予め定められた正方形範囲の部分画素解像度のグリッド内で、第1セットの動きベクトル候補をサーチして最適な動きベクトルV2を見つけ出す。次に、V2に中心をもつ予め定められた正方形範囲の部分画素解像度をもつグリッド内で、第2セットの動きベクトル候補を探索して最適な動きベクトルV3を見つけ出す。その後、V3に中心をもつ予め定められた正方形範囲の部分画素解像度をもつグリッド内で、第3セットの動きベクトル候補を探索してマクロブロックの最適動きベクトルを見つけ出す。
【0015】
本発明の別の好ましい実施形態において、高精度の動きベクトル推定技法は異なる段階において異なる補間フィルタを使用して計算の複雑さを低減することができる。
本発明の別の好ましい実施形態は、レート歪み(RD)に関して最適のベクトルと精度を選択する。この実施形態は、異なる動き精度に従い対応するレート歪み判定基準を用いて最適な動きベクトルと最適な動き精度の両方を決定する。
本発明のさらに別の好ましい実施形態は、有効な可変長符号化(VLC)法により、動きベクトルと精度を符号化する。この技法は、異なる符号化単位で異なる解釈が可能な、関連する動きベクトル精度に従ったVLCテーブルを使用する。
【0016】
より具体的には、本発明の第1の技術手段は、入力画像のフレームから分割された複数のブロックのそれぞれに対し、対象とする現ブロックにおいて、参照フレームの対応する位置からの移動量を表す動きベクトルをブロック毎にサーチする動きベクトルサーチ手段と、1/Nペル(Nは任意の整数)で表現された複数の分数精度を有する前記動きベクトルを用いて動き補償を行う動き補償手段と、前記精度及び前記動きベクトルを符号化する符号化手段とを備えた動き補償動画像符号化装置であって、前記動きベクトルとは別に前記精度を可変長符号化し、各ブロックに対する前記動きベクトルを前記ブロック毎に符号化し、複数の異なる補間フィルタの中から選択される第1のフィルタを用いて、前記複数の精度のうちの第1の精度に従って、前記サーチ、及び前記動き補償を行い、複数の異なる補間フィルタの中から選択される前記第1のフィルタよりも計算の複雑な第2のフィルタを用いて、前記複数の精度のうちの前記第1の精度よりも高精度な第2の精度に従って、前記サーチ、及び前記動き補償を行い、前記精度はフレーム単位で設定が可能であり、1フレーム内の全ての動きベクトルには同一の精度が用いられるが、異なるフレームには異なる精度を用いることを可能とすることを特徴としたものである。
本発明の第2の技術手段は、入力画像のフレームから分割された複数のブロックのそれぞれに対し、対象とする現ブロックにおいて、参照フレームの対応する位置からの移動量を表す動きベクトルをブロック毎にサーチする動きベクトルサーチ手段と、1/Nペル(Nは任意の整数)で表現された複数の分数精度を有する前記動きベクトルを用いて動き補償を行う動き補償手段と、前記精度及び前記動きベクトルを符号化する符号化手段とを備えた動き補償動画像符号化装置であって、前記動きベクトルとは別に前記精度を符号化し、各ブロックに対する前記動きベクトルを前記ブロック毎に符号化し、複数の異なる補間フィルタの中から選択される第1のフィルタを用いて、前記複数の精度のうちの第1の精度に従って、前記サーチ、及び前記動き補償を行い、複数の異なる補間フィルタの中から選択される前記第1のフィルタよりも計算の複雑な第2のフィルタを用いて、前記複数の精度のうちの前記第1の精度よりも高精度な第2の精度に従って、前記サーチ、及び前記動き補償を行い、符号化対象の動きベクトルは、符号化データのベクトル値に対する前記精度の積に相当し、前記精度に応じて異なる値として解釈されるものであることを特徴としたものである。
【0018】
本発明の上述及び他の目的、特徴及び利点は、添付図面を参照し本発明の以下の詳細な説明を読めば容易に理解されよう。
【0019】
【発明の実施の形態】
本発明の諸方法は、各画像ブロックにおいて動き精度を変更して説明するが、精度を全シーケンスに対して固定又はフレーム毎に変更する場合にも適用できる。本発明は、又、発明の背景において記述したように、Telenorの動画符号化器(及び特殊にはTelenorの符号化器)を使用するものとして記述する。Telenorの動画符号化器の用語を用いて説明するが、ここに記述する技術は、任意の他の動き補償動画符号化器にも適用できる。
【0020】
動画符号化器の多くは、半画素(又は“1/2ペル”)精度の動きベクトルと双線形補間を用いる。Telenorの符号化器の第1バージョンは、1/2ペル動きベクトルと双線形補間を用いる。しかしながら、Telenorの符号化器の最新バージョンは、さらなる圧縮利得を得るために1/3ペルベクトルと立方体形補間機能を内蔵している。特に、1つの与えられたマクロブロックにおいて、Telenorの符号化器は、図2に示す2つのステップで最適な動きベクトルを推定する。先ず、このTelenor符号化器は、最適な整数ペルベクトルV1(図1)を探索する(ステップ100)。次に、このTelenor符号化器は、V1付近の最適な1/3ペル精度ベクトルV1/3(図1)をサーチする(ステップ102)。この第2ステップは図1のグラフに示すように、3×3内挿(補間)参照フレーム内の(各々16×16の画素列を有する)全部で8個のブロックを調べて最も一致するブロックを見つけ出す。8個のブロックの動きベクトルは、V1に中心をもつグリッド中に8個の実点で表示してある。図1において、最も一致するのは、動きベクトルV1/3=(VX,VY)=(1+1/3,1)に関連するブロックである。
【0021】
本発明の技術によれば、符号化器は、フルサーチ戦略又はファストサーチ戦略のいずれかを用いて任意の動き精度の組(例えば、1/2, 1/3及び1/6ペル精度動きベクトル)間で精度を選択できる。
【0022】
(フルサーチAMA方式のサーチ戦略)
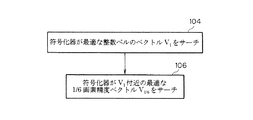
図3及び図4に示すように、このフルサーチ適応動き精度(AMA)方式サーチ戦略の場合、Telenor符号化器は、図3に示す5個の画素の(上方画素数、下方画素数及び両側の画素数により規定される正方形ブロックとして定義される)“正方形範囲”と1/6画素解像度のグリッド上の全ての動きベクトル候補をサーチする。図4に示すように、フルサーチAMAの第1ステップ(104)では最適な整数ペルベクトルV1(図1)をサーチする。フルサーチAMAの第2ステップ(106)において、符号化器はV1付近の最適な1/6画素精度ベクトルV1/6(図3)をサーチする。換言すれば、このフルサーチAMAは、Telenorプロセスの第2ステップを変更して符号化器が速度空間内の他の部分画素位置における動きベクトル候補もサーチできるようにしたものである。この目的は、グリッド内の最適動きベクトル、即ち、現マクロブロックに最も一致するブロック(補間参照フレーム内)を指示するベクトルを発見することである。このフルサーチ戦略は、120個の部分画素候補をサーチするので計算は複雑ではあるが、本発明のこの実施形態の全潜在能力を示している。
【0023】
動きベクトルサーチにおける重要な課題は、所与のマクロブロックに最も符合するブロックを確定する判定測度又は基準の選択である。実際には、殆どの方法は、平均自乗誤差(MSE)又は平均絶対差分(MAD)の何れかの判定基準を用いている。2つのブロック間のMSEは、2つのブロックの画素値を引き算して、画素値差を自乗し、平均値を取る。2つのブロック間のMAD差分は、自乗計算の代わりに画素値差の絶対値を計算することを除き同様な歪み測度である。2つの画像ブロックが互いに類似であれば、MSE及びMADの値は小さい。しかしながら、画像ブロックが類似でなければ、これらの値は大きい。従って、代表的な動画符号化器は、最小のMSE又は最小のMADの何れかをもたらす動きベクトルを選択することにより、マクロブロックに最も符合するマクロブロックを見つけ出す。言い換えれば、最適動きベクトルに関連するブロックは、MSE又はMADにおいて所与のマクロブロックに最も近似のブロックである。
【0024】
残念ながら、MSE及びMADの歪み測度は、ベクトルを実際に符号化するビットのコストを考慮していない。例えば、1つの任意動きベクトルはMSEを最小にできるが、しかし、ビットで符号化するコストが非常に高く、符号化の観点から最適の選択でない場合があり得る。
【0025】
この問題を処理するために、Telenorが記述しているような最新の符号化器は、“歪み+L×ビット”形のレート歪み(RD)判定基準を使用して最適な動きベクトルを選択する。“歪み”値は、代表的にはMSE又はMADであり、“L”は圧縮レベル(即ち、量子化ステップサイズ)に依存する定数であり、“ビット”は動きベクトルの符号化に要するビット数である。一般に、このタイプのどのRD判定基準も本発明に使用できる。しかしながら、本発明の場合、“ビット”は、ベクトルの符号化に要するビットとそのベクトル精度の符号化に要するビットを含んでいる。事実、幾つかの候補が、幾つかの精度モードをもつために、若干数の“ビット”値をもち得る。例えば、位置(1/2, −1/2)に在る候補は、1/2又は1/6画素精度をもつと考えられる。
【0026】
(ファストサーチAMA方式サーチ戦略)
図5及び図6に示すように、ファストサーチ適応動き精度(AMA)方式サーチ戦略の場合、符号化器は動きベクトル候補の小さいセットのみを調べる。ファストサーチAMAの第1ステップ(108)では、符号化器は、1/2画素解像度のグリッドにおいてV1に中心をもち一辺が1の正方形(正方形範囲1内)の8個の動きベクトル候補をチェックする。最小のRDコストを有する候補(即ち、8個の前ベクトルとV1の中で最適のもの)を表現するためにV2を設定する(110)。次に、符号化器は、1/6画素解像度のグリッド上でV2に中心をもち一辺が1の正方形内の8個の動きベクトル位置をチェックする(112)。V2が最小RDコストを有している場合(114)、符号化器は探索を中止し、V2をブロックの動きベクトルとして選択する。そうでなければ、8個の前ベクトルの中で最適のものを表現するためにV3を設定する(116)。符号化器は、次に1/6画素解像度のグリッドにおいてV3に中心をもつ正方形範囲1内の新しい動きベクトル候補をサーチする(118)。このグリッド内の幾つかの候補は既にチェック済みであり飛ばすことができることに注意すべきである。この最終ステップでは最小のRDコストをもつ候補をブロックの動きベクトルとして選択する(120)。
【0027】
実験データによれば、この簡単なファストサーチ戦略は、平均で(Telenor探索戦略より10個多い)部分画素空間における代表的な約18の位置のRDコストをチェックするので、従って、全体としての計算の複雑さは適度の増加に留まる。
【0028】
図8乃至図18に関連して以下に説明する実験結果は、このAMA方式のファストサーチバージョンを用いることによる圧縮性能の損失が実際に皆無であることを示している。その理由は、このファストサーチAMA探索戦略が、RDコストが高レベルから低レベルにスマートに移行するパスを創設することによって“歪み+L×ビット”曲線の凸度(“歪み”は凸性であることは知られている)を活用しているからである。
【0029】
本発明の別の実施態様は、ステップ108−120のうちの1つ又はそれ以上を変更する。これらの実施形態も効率的であり、部分画素速度空間においてチェックする動きベクトル候補数をさらに削減している。
【0030】
図7の例では、1/3ペル精度の候補をチェックする。この実施例において、ステップ112は3つの可能なシナリオの1つで置き換えられる。先ず、ステップ110からの最適な動きベクトル候補がV1(“整数ペルベクトル”)の中心にあれば(130)、符号化器は中心ベクトルと次に最低のRDコストをもつ1/2ペル位置の間にある1/3ペル精度の3候補をチェックする(132)。次に、ステップ110からの最適な動きベクトル候補がコーナーのベクトルであれば(134)、符号化器はかようなコーナーベクトルに最も近い1/3ペル精度の4ベクトル候補をチェックする(136)。第3に、ステップ110からの最適な動きベクトル候補が2つのコーナーベクトルの間にあれば(138)、符号化器は2つのコーナーベクトルの中でRDコストが低い方を決定し、ステップ110からの最適な動きベクトル候補とかようなコーナーとの間の直線に最も近い1/3ペル精度の4ベクトル候補をチェックする(140)。V2が中心に無く又コーナーベクトルでも無い場合は2つのコーナー間にある筈であり、このプロセスを実行する際にステップ138は不必要になることに注意すべきである。符号化器を1/3画素精度の動きベクトルの探索に設定する場合、図7は、ステップ114への続行ではなく終了になるように変更可能である。
【0031】
(計算量とメモリの削減)
ステップ108では1/2画素精度の動きベクトル候補のみをチェックするために、ハードウェアとソフトウェアの実装に要する計算量とメモリは大幅に削減される。特に、このファストサーチのスマートな実装において、参照フレームは2×2だけ補間して1/2ペルベクトル候補に対するRDコストを得る。ハードウェア又はソフトウェア符号化器用のファスト(又はキャッシュ)メモリは、参照フレームを3×3だけ補間するために要するTelenorの方法と比較してかなりの量削減される。Telenorの符号化器と比較し、キャッシュメモリは9/4の削減又は2.25倍の削減になる。若干の追加補間はブロック単位で後で行うことができる。
【0032】
さらに、ステップ108における補間はRDコスト関数値を下げる方向にサーチを方向づけるように用いるので、これらの補間には複合フィルタを必要としない。従って、計算量はステップ108用に簡単な双線形フィルタを用いることにより節減できる。
【0033】
又、マクロブロックモード(例えば、16×16,4個の8×8等)の選択のような他の主要な符号化に関する決定は、そのような決定は高精度を用いることによる有意な利益がないので、1/2ペルベクトルを用いて行うことができる。次に、符号化器は残りのステップにおいてチェックする若干の追加ベクトル候補に対して必要な部分画素値を補間するためにより複雑な立方体(3次)フィルタを使用することができる。マクロブロックモードは既に選択済みであるので、これらの最後の補間は選択モードに対し実施する必要がある。
【0034】
複数フィルタを使用することにより、常時立方体補間を用いるTelenorの方法と比較し、Sparc Ultra 10型ワークステーションでの稼動時間で20%を超える計算量の削減が得られた。さらに、ファストメモリの必要性は、略半分に減少した。又、圧縮性能に関しては損失は殆どなかった。このファストサーチの1実施形態での比較において、Benzler技法は、Telenor符号化器において画素当たり約70の補間を必要とするのに対し、本発明は画素当たり約7つの補間を要するのみである。
【0035】
(動きベクトルと精度のビット符号化)
最適な動きベクトルと精度が決定されると、符号化器は動きベクトルと精度値の両方をビットで符号化する。1つの方法は、所与の精度(例えば、半画素精度)で動きベクトルを符号化し、次に、そのベクトルをより高い動き精度に詳細化するために幾つかのエクストラビットを追加する。これは、B.Girodが提案した戦略であるが、但し、レート歪みの点では部分最適化である。
【0036】
本発明の1つの好ましい実施形態では、1つのマクロブロックに対する動きベクトルの精度を表1に示したような簡単な符号を用いて最初に符号化する。符号長{1,2,2}の任意の他のテーブルを用いることも可能である。ビットレートは、代表的なDPCM法を用いてさらに減少させることができる。
【0037】
【表1】

次に、各々の精度空間におけるベクトル値を符号化する。これらのビットはH26Lコーディックにおいて使用されるような単一VLCテーブルの項目より得ることができる。重要なアイデアは、これらのビットはマクロブロックの動き精度によって異なって解釈されることである。例えば、動き精度が1/3であり、異なる動きベクトルのX成分に対する符号ビットが000011である場合、ベクトルのX成分はVx=2/3である。精度が1/2であれば、ベクトルのX成分はVx=1に相当する。
【0039】
1/2及び1/4画素精度ベクトルの符号化に使用できる可変長符号(VLC)テーブルにより動きベクトルを符号化するBenzlerの方法と比較して、本発明の方法は、任意の動き精度のベクトルを符号化するのに用いられ、テーブルは、各フレームとマクロブロックにおいて異なって解釈できる。さらに、本発明の全体的方法は、任意の動き精度に適用でき、互いに倍数であったり1/n(nは整数)型である必要はない。所与の部分画素空間における増分数は単純に計数し、テーブルの関連項目中のビットを符号として使用する。復号器の観点からは、動き精度を復号すれば動きベクトルもまた容易に復号することができる。その後、前フレーム中の関連ブロックを代表的な4タップの立方体補間器を用いて再構築する。各動き精度毎に異なる4タップフィルタが存在する。
AMA方式は、予測ブロックの再構築に要する動作数は同じで、動き精度とは無関係なので、復号の複雑さを増大させることはない。
【0040】
(実験結果)
図8乃至図18は、表2に記載の種々の動画シーケンス、解像度及びフレームレートでAMAを使用又は使用せずにTelenorの符号化コーディックを試験した結果を示している。これらの図面は、各ケース毎にレート歪み(“RD”)を作図したものである。“Anchor”曲線は、最適化H.263+(図8と図9のみ)からのRD点を示している。“Telenor 1/2+b”曲線は1/2ペルベクトルと双線形補間によるTelenor(古典的な例)を示している。“Telenor1/3”曲線は、現Telenorの提案(“Telenor符号化器”)を示している。“Telenor+AMA+c”曲線は、本発明のフルサーチ戦略によるTelenor符号化器を示している。図15乃至図17に示す“Telenor+FSAMA+c”曲線は、本発明のファストサーチ戦略によるTelenor符号化器を示している。(他に規定がない限り、AMAのフルサーチバージョンは実験に使用した符号化器の戦略であった。)全ての試験結果は、符号化器と復号器においてクロスチェックを行った。これらの結果は、AMAを実施する場合、信号対雑音(ノイズ)比のピーク(“PSNR”)における利得は、H26Lを超え1dBの高さであり、古典的な例よりもさらに高い。
【0041】
【表2】
動画シーケンスは、“ゆれるパリ”を除き、動画符号化共同体により共通に使用されている。後者は、よく知られているシーケンス“パリ”を、XとY成分が[−1,1]の範囲で任意の値をとる動きベクトルだけ移動させることにより得られた合成動画である。この合成動画は、代表的な動画電話シーンにおいて手持ちカメラにより生じた小さな動きをシミュレートする。
【0043】
(動き精度適応(AMA)方式のフルサーチ及びファストサーチの比較)
図16及び17に示した実験結果は、AMAに関するファストサーチ戦略(“Telenor FSAMA+c”)とフルサーチ戦略(Telenor AMA+c“)方式の符号化器の使用性能が実際には同じであることを示している。ファストサーチ戦略は部分画素速度空間においてRDコスト曲線の凸性を利用するのでこれは間違いない。言い換えれば、RDコスト曲線の形状はなだらかな凸曲線を辿るので、その最小値は、曲線を下降させる幾つかのスマートなファストサーチスキームを用いて容易に発見できる。
【0044】
(AMA及び複数参照フレームの結合)
図18に示すグラフにおいて、“1r”の標識をもつ曲線は、動き補償のために1枚の参照フレームのみを使用した。従って、これらの曲線は図10に示した曲線と同じである。“5r”の標識をもつ曲線は5枚の参照フレームを使用した。
AMAによる利得は複数の参照フレームを使用して得た曲線に付加されることを実験は示している。参照フレーム1枚の場合のAMAによる利得は、緑とピンクの曲線(注:凡例で×と△)を比較することにより測定でき、参照フレーム5枚の場合の利得は青と赤の曲線(注:凡例で○と●)間で測定できる。
【0045】
特に注意すべきことは、本発明はフレームレベルで実施でき、異なるフレームは異なる動き精度を用いることができるが、1フレーム内の全ての動きベクトルには同一精度を用いることである。この実施形態において、動きベクトル精度は、フレーム層において1度だけ信号化されるのが好ましい。実験は、全フレームに対して最適な固定動き精度を用いることによっても、マクロブロック適応の場合につき提示したような圧縮利得が生じることを示している。
【0046】
他のフレームベースの実施形態において、符号化器は、異なるベクトル精度でフレーム全体に動き補償を行い、その後、RD判定基準に従って最適な精度を選択することができる。この方法は、パイプライン方式のワンパス符号化器には適しないが、ソフトウェアベースの符号化器又はより複雑な符号化には適用できる。他のフレームベースの実施形態において、符号化器は所与のフレームに対する最適精度を予測するために以前の統計値及び/又は公式を用いることができる(例えば、Ribasの論文に記述されている公式又はそのバージョンを使用することができる)。この方法は、性能利得は予測に用いる公式の精度に依存するが、ワンパス符号化器には適している。
【0047】
上述の明細書に用いた用語と表現は説明のためのものであり制限するものではなく、かような用語と表現を用いるに当たって表示及び記述の特徴又はその部分の同等の用語及び表現を排除する意図は全くなく、本発明の範囲は特許請求範囲の請求項によってのみ規定され限定されることを確認する。
【図面の簡単な説明】
【図1】速度空間における完全ペル及び1/3ペルの位置の例を示す図である。
【図2】最適動きベクトルを推定する従来技術による方法を説明するためのフローチャート図である。
【図3】部分画素速度空間におけるフルサーチ時の動きベクトル候補位置の例を示す図である。
【図4】本発明によるフルサーチ方式の最適動きベクトル推定方法の好ましい実施態様を説明するためのフローチャート図である。
【図5】部分画素速度空間におけるファストサーチ時の動きベクトル候補位置の例を示す図である。
【図6】本発明によるファストサーチ方式の最適動きベクトル推定方法の好ましい実施形態を説明するためのフローチャート図である。
【図7】図6のステップ114の別の好ましい実施形態を説明するためのフローチャート図である。
【図8】動画シーケンス“コンテナ”において毎秒10フレームのフレームレートと解像度QCIFで適応動き精度(AMA)を使用、または使用しないでTelenor符号化器の性能試験をした結果を示すグラフ図である。
【図9】動画シーケンス“ニュース”において毎秒10フレームのフレームレートと解像度QCIFで適応動き精度(AMA)を使用または使用しないでTelenor符号化器の性能試験をした結果を示すグラフ図である。
【図10】動画シーケンス“自動車”において毎秒10フレームのフレームレートと解像度QCIFで適応動き精度(AMA)を使用または使用しないでTelenor符号化器の性能試験をした結果を示すグラフ図である。
【図11】動画“庭園”においてい毎秒15フレームのフレームレートと解像度SIFで適応動き精度(AMA)を使用または使用しないでTelenor符号化器の性能試験をした結果を示すグラフ図である。
【図12】動画シーケンス“庭園”において毎秒15フレームのフレームレートと解像度QCIFで適応動き精度(AMA)を使用または使用しないでTelenor符号化器の性能試験をした結果を示すグラフ図である。
【図13】動画シーケンス“Tempete”において毎秒15フレームのフレームレートと解像度SIFで適応動き精度(AMA)を使用または使用しないでTelenor符号化器の性能試験をした結果を示すグラフ図である。
【図14】動画シーケンス“Tempete”において毎秒15フレームのフレームレートと解像度QCIFで適応動き精度(AMA)を使用または使用しないでTelenor符号化器の性能試験をした結果を示すグラフ図である。
【図15】動画シーケンス“ゆれるパリ”において毎秒15フレームのフレームレートと解像度QCIFで適応動き精度(AMA)を使用または使用しないでTelenor符号化器の性能試験をした結果を示すグラフ図である。
【図16】動画シーケンス“自動車”において、毎秒10フレームのフレームレートと解像度QCIFでファストサーチ戦略(“Telenor FSAMA+c")及びフルサーチ戦略(“Telenor AMA+c”)の性能試験の結果を示すグラフ図である。
【図17】動画シーケンス“コンテナ”において毎秒10フレームのフレームレートと解像度QCIFでファストサーチ戦略(“Telenor FSAMA+c")及びフルサーチ戦略(“Telenor AMA+c”)の性能試験の結果を示すグラフ図である。
【図18】動画シーケンス“自動車”において解像度QCIFと毎秒10フレームのフレームレートで動き補償のために1枚の参照フレームのみを使用し試験した場合と動き補償のために複数枚のフレームを使用し試験した場合とを比較する性能試験結果を示すグラフ図である。
Claims (2)
- 入力画像のフレームから分割された複数のブロックのそれぞれに対し、対象とする現ブロックにおいて、参照フレームの対応する位置からの移動量を表す動きベクトルをブロック毎にサーチする動きベクトルサーチ手段と、
1/Nペル(Nは任意の整数)で表現された複数の分数精度を有する前記動きベクトルを用いて動き補償を行う動き補償手段と、
前記精度及び前記動きベクトルを符号化する符号化手段とを備えた動き補償動画像符号化装置であって、
前記動きベクトルとは別に前記精度を可変長符号化し、
各ブロックに対する前記動きベクトルを前記ブロック毎に符号化し、
複数の異なる補間フィルタの中から選択される第1のフィルタを用いて、前記複数の精度のうちの第1の精度に従って、前記サーチ、及び前記動き補償を行い、
複数の異なる補間フィルタの中から選択される前記第1のフィルタよりも計算の複雑な第2のフィルタを用いて、前記複数の精度のうちの前記第1の精度よりも高精度な第2の精度に従って、前記サーチ、及び前記動き補償を行い、
前記精度はフレーム単位で設定が可能であり、1フレーム内の全ての動きベクトルには同一の精度が用いられるが、異なるフレームには異なる精度を用いることを可能とすることを特徴とする動き補償動画像符号化装置。 - 入力画像のフレームから分割された複数のブロックのそれぞれに対し、対象とする現ブロックにおいて、参照フレームの対応する位置からの移動量を表す動きベクトルをブロック毎にサーチする動きベクトルサーチ手段と、
1/Nペル(Nは任意の整数)で表現された複数の分数精度を有する前記動きベクトルを用いて動き補償を行う動き補償手段と、
前記精度及び前記動きベクトルを符号化する符号化手段とを備えた動き補償動画像符号化装置であって、
前記動きベクトルとは別に前記精度を符号化し、
各ブロックに対する前記動きベクトルを前記ブロック毎に符号化し、
複数の異なる補間フィルタの中から選択される第1のフィルタを用いて、前記複数の精度のうちの第1の精度に従って、前記サーチ、及び前記動き補償を行い、
複数の異なる補間フィルタの中から選択される前記第1のフィルタよりも計算の複雑な第2のフィルタを用いて、前記複数の精度のうちの前記第1の精度よりも高精度な第2の精度に従って、前記サーチ、及び前記動き補償を行い、
符号化対象の動きベクトルは、符号化データのベクトル値に対する前記精度の積に相当し、前記精度に応じて異なる値として解釈されるものであることを特徴とする動き補償動画像符号化装置。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14610299P | 1999-07-27 | 1999-07-27 | |
| US60/146102 | 1999-07-27 | ||
| US09/615,791 | 2000-07-13 | ||
| US09/615,791 US6968008B1 (en) | 1999-07-27 | 2000-07-13 | Methods for motion estimation with adaptive motion accuracy |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009189322A Division JP2009273157A (ja) | 1999-07-27 | 2009-08-18 | 動き補償動画像復号装置および動き補償動画像復号方法 |
| JP2010217117A Division JP5269023B2 (ja) | 1999-07-27 | 2010-09-28 | 動き補償動画像符号化装置及び動き補償動画像復号装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2001189934A JP2001189934A (ja) | 2001-07-10 |
| JP2001189934A5 JP2001189934A5 (ja) | 2006-11-16 |
| JP4614512B2 true JP4614512B2 (ja) | 2011-01-19 |
Family
ID=26843579
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000256484A Expired - Fee Related JP4614512B2 (ja) | 1999-07-27 | 2000-07-24 | 適応性のある動き精度をもった動き推定方法 |
| JP2009189322A Pending JP2009273157A (ja) | 1999-07-27 | 2009-08-18 | 動き補償動画像復号装置および動き補償動画像復号方法 |
| JP2010217117A Expired - Lifetime JP5269023B2 (ja) | 1999-07-27 | 2010-09-28 | 動き補償動画像符号化装置及び動き補償動画像復号装置 |
| JP2011265393A Withdrawn JP2012075175A (ja) | 1999-07-27 | 2011-12-05 | 動き補償動画像符号化装置及び動き補償動画像復号装置 |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009189322A Pending JP2009273157A (ja) | 1999-07-27 | 2009-08-18 | 動き補償動画像復号装置および動き補償動画像復号方法 |
| JP2010217117A Expired - Lifetime JP5269023B2 (ja) | 1999-07-27 | 2010-09-28 | 動き補償動画像符号化装置及び動き補償動画像復号装置 |
| JP2011265393A Withdrawn JP2012075175A (ja) | 1999-07-27 | 2011-12-05 | 動き補償動画像符号化装置及び動き補償動画像復号装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (4) | US6968008B1 (ja) |
| EP (4) | EP2373036B1 (ja) |
| JP (4) | JP4614512B2 (ja) |
| HK (1) | HK1161948A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011035928A (ja) * | 1999-07-27 | 2011-02-17 | Sharp Corp | 動き補償動画像符号化装置及び動き補償動画像復号装置 |
Families Citing this family (70)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7269219B1 (en) | 1997-02-14 | 2007-09-11 | At&T Corp. | Non-linear quantizer for video coding |
| EP1359766A3 (en) * | 1997-02-14 | 2005-02-16 | AT&T Corp. | A method of generating a dequantized dc luminance or dc chrominance coefficient |
| EP0914636A4 (en) * | 1997-04-07 | 2008-07-30 | At & T Corp | SYSTEM AND METHOD FOR PROCESSING AUDIOVISUAL INFORMATION OBJECT-ORIENTED |
| US7110452B2 (en) * | 2001-03-05 | 2006-09-19 | Intervideo, Inc. | Systems and methods for detecting scene changes in a video data stream |
| CN1976472A (zh) * | 2001-09-18 | 2007-06-06 | 松下电器产业株式会社 | 图像的译码方法 |
| JP3861698B2 (ja) | 2002-01-23 | 2006-12-20 | ソニー株式会社 | 画像情報符号化装置及び方法、画像情報復号装置及び方法、並びにプログラム |
| US8284844B2 (en) | 2002-04-01 | 2012-10-09 | Broadcom Corporation | Video decoding system supporting multiple standards |
| KR100474285B1 (ko) * | 2002-04-08 | 2005-03-08 | 엘지전자 주식회사 | 모션벡터결정방법 |
| US7305034B2 (en) * | 2002-04-10 | 2007-12-04 | Microsoft Corporation | Rounding control for multi-stage interpolation |
| US7620109B2 (en) * | 2002-04-10 | 2009-11-17 | Microsoft Corporation | Sub-pixel interpolation in motion estimation and compensation |
| US7224731B2 (en) * | 2002-06-28 | 2007-05-29 | Microsoft Corporation | Motion estimation/compensation for screen capture video |
| JP4724351B2 (ja) | 2002-07-15 | 2011-07-13 | 三菱電機株式会社 | 画像符号化装置、画像符号化方法、画像復号装置、画像復号方法、および通信装置 |
| JP4841101B2 (ja) * | 2002-12-02 | 2011-12-21 | ソニー株式会社 | 動き予測補償方法及び動き予測補償装置 |
| US7408988B2 (en) * | 2002-12-20 | 2008-08-05 | Lsi Corporation | Motion estimation engine with parallel interpolation and search hardware |
| US20050013498A1 (en) | 2003-07-18 | 2005-01-20 | Microsoft Corporation | Coding of motion vector information |
| US8064520B2 (en) | 2003-09-07 | 2011-11-22 | Microsoft Corporation | Advanced bi-directional predictive coding of interlaced video |
| US7724827B2 (en) | 2003-09-07 | 2010-05-25 | Microsoft Corporation | Multi-layer run level encoding and decoding |
| US7567617B2 (en) | 2003-09-07 | 2009-07-28 | Microsoft Corporation | Predicting motion vectors for fields of forward-predicted interlaced video frames |
| US7253374B2 (en) * | 2003-09-15 | 2007-08-07 | General Motors Corporation | Sheet-to-tube welded structure and method |
| US7983835B2 (en) | 2004-11-03 | 2011-07-19 | Lagassey Paul J | Modular intelligent transportation system |
| DE102004019339A1 (de) * | 2004-04-21 | 2005-11-24 | Siemens Ag | Prädiktionsverfahren, sowie zugehöriges Verfahren zur Decodierung eines Prädiktionsverfahrens, zugehörige Encodiervorrichtung und Decodiervorrichtung |
| US8130825B2 (en) * | 2004-05-10 | 2012-03-06 | Nvidia Corporation | Processor for video data encoding/decoding |
| US8018463B2 (en) * | 2004-05-10 | 2011-09-13 | Nvidia Corporation | Processor for video data |
| EP1617672A1 (en) * | 2004-07-13 | 2006-01-18 | Matsushita Electric Industrial Co., Ltd. | Motion estimator/compensator including a 16-bit 1/8 pel interpolation filter |
| TWI256844B (en) * | 2004-11-16 | 2006-06-11 | Univ Nat Kaohsiung Applied Sci | Flat hexagon-based search method for fast block moving detection |
| JP4736456B2 (ja) * | 2005-02-15 | 2011-07-27 | 株式会社日立製作所 | 走査線補間装置、映像表示装置、映像信号処理装置 |
| JP2008536414A (ja) * | 2005-04-13 | 2008-09-04 | ゴットフリート・ヴィルヘルム・ライプニッツ・ウニヴェルジテート・ハノーヴァー | ビデオの拡張された符号化方法及び装置 |
| US20060233258A1 (en) * | 2005-04-15 | 2006-10-19 | Microsoft Corporation | Scalable motion estimation |
| TWI280805B (en) * | 2005-07-20 | 2007-05-01 | Novatek Microelectronics Corp | Method and apparatus for cost calculation in decimal motion estimation |
| US8165205B2 (en) * | 2005-09-16 | 2012-04-24 | Sony Corporation | Natural shaped regions for motion compensation |
| US8208548B2 (en) | 2006-02-09 | 2012-06-26 | Qualcomm Incorporated | Video encoding |
| US8155195B2 (en) * | 2006-04-07 | 2012-04-10 | Microsoft Corporation | Switching distortion metrics during motion estimation |
| US8494052B2 (en) * | 2006-04-07 | 2013-07-23 | Microsoft Corporation | Dynamic selection of motion estimation search ranges and extended motion vector ranges |
| US20070268964A1 (en) * | 2006-05-22 | 2007-11-22 | Microsoft Corporation | Unit co-location-based motion estimation |
| US9307122B2 (en) * | 2006-09-27 | 2016-04-05 | Core Wireless Licensing S.A.R.L. | Method, apparatus, and computer program product for providing motion estimation for video encoding |
| US20080111923A1 (en) * | 2006-11-09 | 2008-05-15 | Scheuermann W James | Processor for video data |
| KR101369746B1 (ko) * | 2007-01-22 | 2014-03-07 | 삼성전자주식회사 | 적응적 보간 필터를 이용한 영상 부호화, 복호화 방법 및장치 |
| US8358699B2 (en) * | 2007-04-09 | 2013-01-22 | Cavium, Inc. | Method and system for selection of reference picture and mode decision |
| US9118927B2 (en) * | 2007-06-13 | 2015-08-25 | Nvidia Corporation | Sub-pixel interpolation and its application in motion compensated encoding of a video signal |
| US8213515B2 (en) * | 2008-01-11 | 2012-07-03 | Texas Instruments Incorporated | Interpolated skip mode decision in video compression |
| JP4824712B2 (ja) * | 2008-02-29 | 2011-11-30 | 日本電信電話株式会社 | 動き推定精度推定方法、動き推定精度推定装置、動き推定精度推定プログラムおよびそのプログラムを記録したコンピュータ読み取り可能な記録媒体 |
| US20090323807A1 (en) * | 2008-06-30 | 2009-12-31 | Nicholas Mastronarde | Enabling selective use of fractional and bidirectional video motion estimation |
| US8345996B2 (en) * | 2008-07-07 | 2013-01-01 | Texas Instruments Incorporated | Determination of a field referencing pattern |
| JP4793424B2 (ja) * | 2008-11-04 | 2011-10-12 | 三菱電機株式会社 | 画像符号化装置、画像符号化方法、画像復号装置、画像復号方法、および通信装置 |
| EP2489189A1 (en) * | 2009-10-14 | 2012-08-22 | Thomson Licensing | Methods and apparatus for adaptive coding of motion information |
| CN102804774B (zh) * | 2010-01-19 | 2016-08-24 | 汤姆逊许可证公司 | 用于视频编解码的降低了复杂度的模板匹配预测方法和装置 |
| US20110188571A1 (en) * | 2010-02-04 | 2011-08-04 | Sony Corporation | Recursive adaptive interpolation filters (raif) |
| US9237355B2 (en) * | 2010-02-19 | 2016-01-12 | Qualcomm Incorporated | Adaptive motion resolution for video coding |
| JP2012004615A (ja) * | 2010-06-14 | 2012-01-05 | Nippon Telegr & Teleph Corp <Ntt> | 動きベクトル探索方法,動きベクトル探索装置およびそのプログラム |
| TWI521950B (zh) | 2010-07-21 | 2016-02-11 | 財團法人工業技術研究院 | 用於視訊處理之移動估計之方法及裝置 |
| US10327008B2 (en) | 2010-10-13 | 2019-06-18 | Qualcomm Incorporated | Adaptive motion vector resolution signaling for video coding |
| CN102710934B (zh) | 2011-01-22 | 2015-05-06 | 华为技术有限公司 | 一种运动预测或补偿方法 |
| US9319716B2 (en) * | 2011-01-27 | 2016-04-19 | Qualcomm Incorporated | Performing motion vector prediction for video coding |
| US9143799B2 (en) * | 2011-05-27 | 2015-09-22 | Cisco Technology, Inc. | Method, apparatus and computer program product for image motion prediction |
| US9131239B2 (en) * | 2011-06-20 | 2015-09-08 | Qualcomm Incorporated | Unified merge mode and adaptive motion vector prediction mode candidates selection |
| JP5649524B2 (ja) * | 2011-06-27 | 2015-01-07 | 日本電信電話株式会社 | 映像符号化方法,装置,映像復号方法,装置およびそれらのプログラム |
| CA2873487A1 (en) * | 2012-05-14 | 2013-11-21 | Luca Rossato | Decomposition of residual data during signal encoding, decoding and reconstruction in a tiered hierarchy |
| CN103413217A (zh) * | 2013-08-30 | 2013-11-27 | 国家电网公司 | 预付费系统的控制方法及控制装置 |
| US9774881B2 (en) | 2014-01-08 | 2017-09-26 | Microsoft Technology Licensing, Llc | Representing motion vectors in an encoded bitstream |
| US9749642B2 (en) | 2014-01-08 | 2017-08-29 | Microsoft Technology Licensing, Llc | Selection of motion vector precision |
| US9942560B2 (en) | 2014-01-08 | 2018-04-10 | Microsoft Technology Licensing, Llc | Encoding screen capture data |
| CN106331722B (zh) | 2015-07-03 | 2019-04-26 | 华为技术有限公司 | 图像预测方法和相关设备 |
| CN106331703B (zh) | 2015-07-03 | 2020-09-08 | 华为技术有限公司 | 视频编码和解码方法、视频编码和解码装置 |
| US10715818B2 (en) * | 2016-08-04 | 2020-07-14 | Intel Corporation | Techniques for hardware video encoding |
| US10602174B2 (en) | 2016-08-04 | 2020-03-24 | Intel Corporation | Lossless pixel compression for random video memory access |
| BR112019028012A2 (pt) | 2017-06-30 | 2020-07-07 | Huawei Technologies Co., Ltd. | dispositivo e método para determinar um vetor de movimento, codificador e decodificador de vídeo para codificar e decodificar uma pluralidade de fotos |
| US10291925B2 (en) | 2017-07-28 | 2019-05-14 | Intel Corporation | Techniques for hardware video encoding |
| US11025913B2 (en) | 2019-03-01 | 2021-06-01 | Intel Corporation | Encoding video using palette prediction and intra-block copy |
| MX2021010898A (es) * | 2019-03-12 | 2021-11-12 | Fraunhofer Ges Forschung | Codificadores, decodificadores, metodos y flujos de bits de video, y programas de computadora para codificacion hibrida de video. |
| US10855983B2 (en) | 2019-06-13 | 2020-12-01 | Intel Corporation | Encoding video using two-stage intra search |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04264889A (ja) * | 1991-02-19 | 1992-09-21 | Victor Co Of Japan Ltd | 動き補償フレーム間符号化装置 |
| JPH0795585A (ja) * | 1993-09-17 | 1995-04-07 | Sony Corp | 動きベクトル検出装置 |
| JPH08116532A (ja) * | 1994-10-14 | 1996-05-07 | Graphics Commun Lab:Kk | 画像復号化方式および装置 |
| JPH09153820A (ja) * | 1995-11-29 | 1997-06-10 | Sharp Corp | 符号化/復号化装置 |
| JPH1042295A (ja) * | 1996-07-19 | 1998-02-13 | Sony Corp | 映像信号符号化方法および映像信号符号化装置 |
| JPH1146364A (ja) * | 1997-07-28 | 1999-02-16 | Victor Co Of Japan Ltd | 動き補償符号化装置、復号化装置、符号化方法及び復号化方法 |
| JPH1155673A (ja) * | 1997-07-31 | 1999-02-26 | Victor Co Of Japan Ltd | 動きベクトル符号化装置、復号化装置、符号化方法、及び復号化方法 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0294962B1 (en) | 1987-06-09 | 1995-07-19 | Sony Corporation | Motion vector estimation in television images |
| JPS6442295A (en) | 1987-08-10 | 1989-02-14 | Seiko Epson Corp | Memory card mounting structure |
| JPH03117991A (ja) | 1989-09-29 | 1991-05-20 | Victor Co Of Japan Ltd | 動きベクトル符号化装置及び復号化装置 |
| US4937666A (en) | 1989-12-04 | 1990-06-26 | Bell Communications Research, Inc. | Circuit implementation of block matching algorithm with fractional precision |
| KR950014862B1 (ko) | 1992-02-08 | 1995-12-16 | 삼성전자주식회사 | 움직임추정방법 및 그 장치 |
| JPH05336514A (ja) | 1992-05-29 | 1993-12-17 | Sony Corp | 画像符号化装置 |
| US5614952A (en) * | 1994-10-11 | 1997-03-25 | Hitachi America, Ltd. | Digital video decoder for decoding digital high definition and/or digital standard definition television signals |
| JPH08510880A (ja) | 1993-06-01 | 1996-11-12 | トムソン マルチメディア ソシエテ アノニム | 動き補償された補間の方法及び装置 |
| JP3846642B2 (ja) | 1994-01-31 | 2006-11-15 | ソニー株式会社 | 動き量検出方法及び動き量検出装置 |
| EP0697788A3 (en) * | 1994-08-19 | 1997-03-26 | Eastman Kodak Co | Adaptive and global motion compensated cancellation of the interlacing of successive video images with post-processing |
| US5694179A (en) | 1994-12-23 | 1997-12-02 | Electronics And Telecommunications Research Institute | Apparatus for estimating a half-pel motion in a video compression method |
| EP1274253A3 (en) * | 1995-08-29 | 2005-10-12 | Sharp Kabushiki Kaisha | Video coding device and video decoding device with a motion compensated interframe prediction |
| GB2305569B (en) | 1995-09-21 | 1999-07-21 | Innovision Res Ltd | Motion compensated interpolation |
| US5623313A (en) | 1995-09-22 | 1997-04-22 | Tektronix, Inc. | Fractional pixel motion estimation of video signals |
| JPH09102954A (ja) | 1995-10-04 | 1997-04-15 | Matsushita Electric Ind Co Ltd | 1つまたは2つの予測ブロックからブロックの画素値を計算する方法 |
| US5987181A (en) | 1995-10-12 | 1999-11-16 | Sharp Kabushiki Kaisha | Coding and decoding apparatus which transmits and receives tool information for constructing decoding scheme |
| EP0901734B1 (en) * | 1997-03-12 | 2004-02-18 | Matsushita Electric Industrial Co., Ltd. | Mpeg decoder providing multiple standard output signals |
| DE19730306C2 (de) | 1997-07-15 | 1999-05-20 | Deutsch Zentr Luft & Raumfahrt | Verfahren zur Synchronisation von Navigationsmeßdaten mit SAR-Radardaten und Einrichtung zur Durchführung dieses Verfahrens |
| DE19730305A1 (de) | 1997-07-15 | 1999-01-21 | Bosch Gmbh Robert | Verfahren zur Erzeugung eines verbesserten Bildsignals bei der Bewegungsschätzung von Bildsequenzen, insbesondere eines Prädiktionssignals für Bewegtbilder mit bewegungskompensierender Prädiktion |
| US6249318B1 (en) * | 1997-09-12 | 2001-06-19 | 8×8, Inc. | Video coding/decoding arrangement and method therefor |
| DE19746214A1 (de) * | 1997-10-21 | 1999-04-22 | Bosch Gmbh Robert | Verfahren zur bewegungskompensierenden Prädiktion von Bewegtbildfolgen |
| US6269174B1 (en) * | 1997-10-28 | 2001-07-31 | Ligos Corporation | Apparatus and method for fast motion estimation |
| US6968008B1 (en) * | 1999-07-27 | 2005-11-22 | Sharp Laboratories Of America, Inc. | Methods for motion estimation with adaptive motion accuracy |
-
2000
- 2000-07-13 US US09/615,791 patent/US6968008B1/en not_active Ceased
- 2000-07-24 JP JP2000256484A patent/JP4614512B2/ja not_active Expired - Fee Related
- 2000-07-26 EP EP10013511A patent/EP2373036B1/en not_active Expired - Lifetime
- 2000-07-26 EP EP08017967A patent/EP2026582A3/en not_active Withdrawn
- 2000-07-26 EP EP09001688A patent/EP2051531A1/en not_active Withdrawn
- 2000-07-26 EP EP00116033A patent/EP1073276A3/en not_active Withdrawn
-
2007
- 2007-11-20 US US11/984,661 patent/USRE45014E1/en not_active Expired - Lifetime
-
2009
- 2009-08-18 JP JP2009189322A patent/JP2009273157A/ja active Pending
-
2010
- 2010-09-28 JP JP2010217117A patent/JP5269023B2/ja not_active Expired - Lifetime
-
2011
- 2011-11-04 US US13/289,902 patent/USRE44012E1/en not_active Expired - Lifetime
- 2011-12-05 JP JP2011265393A patent/JP2012075175A/ja not_active Withdrawn
-
2012
- 2012-03-01 HK HK12102126.9A patent/HK1161948A1/xx not_active IP Right Cessation
-
2014
- 2014-01-31 US US14/170,134 patent/USRE46468E1/en not_active Expired - Lifetime
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04264889A (ja) * | 1991-02-19 | 1992-09-21 | Victor Co Of Japan Ltd | 動き補償フレーム間符号化装置 |
| JPH0795585A (ja) * | 1993-09-17 | 1995-04-07 | Sony Corp | 動きベクトル検出装置 |
| JPH08116532A (ja) * | 1994-10-14 | 1996-05-07 | Graphics Commun Lab:Kk | 画像復号化方式および装置 |
| JPH09153820A (ja) * | 1995-11-29 | 1997-06-10 | Sharp Corp | 符号化/復号化装置 |
| JPH1042295A (ja) * | 1996-07-19 | 1998-02-13 | Sony Corp | 映像信号符号化方法および映像信号符号化装置 |
| JPH1146364A (ja) * | 1997-07-28 | 1999-02-16 | Victor Co Of Japan Ltd | 動き補償符号化装置、復号化装置、符号化方法及び復号化方法 |
| JPH1155673A (ja) * | 1997-07-31 | 1999-02-26 | Victor Co Of Japan Ltd | 動きベクトル符号化装置、復号化装置、符号化方法、及び復号化方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011035928A (ja) * | 1999-07-27 | 2011-02-17 | Sharp Corp | 動き補償動画像符号化装置及び動き補償動画像復号装置 |
| JP2012075175A (ja) * | 1999-07-27 | 2012-04-12 | Sharp Corp | 動き補償動画像符号化装置及び動き補償動画像復号装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2051531A1 (en) | 2009-04-22 |
| EP2373036B1 (en) | 2013-01-09 |
| EP1073276A3 (en) | 2007-03-14 |
| USRE46468E1 (en) | 2017-07-04 |
| USRE44012E1 (en) | 2013-02-19 |
| HK1161948A1 (en) | 2012-08-10 |
| US6968008B1 (en) | 2005-11-22 |
| EP2026582A3 (en) | 2009-10-21 |
| JP2012075175A (ja) | 2012-04-12 |
| USRE45014E1 (en) | 2014-07-15 |
| EP1073276A2 (en) | 2001-01-31 |
| JP2011035928A (ja) | 2011-02-17 |
| JP2001189934A (ja) | 2001-07-10 |
| JP5269023B2 (ja) | 2013-08-21 |
| EP2373036A1 (en) | 2011-10-05 |
| EP2026582A2 (en) | 2009-02-18 |
| JP2009273157A (ja) | 2009-11-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4614512B2 (ja) | 適応性のある動き精度をもった動き推定方法 | |
| KR101403343B1 (ko) | 부화소 움직임 추정을 이용한 인터 예측 부호화, 복호화방법 및 장치 | |
| JP5021712B2 (ja) | 並列補間及びサーチ・ハードウェアを備えた運動評価エンジン | |
| Flierl et al. | Rate-constrained multihypothesis prediction for motion-compensated video compression | |
| US8942505B2 (en) | Adaptive filter representation | |
| CN113709469B (zh) | 一种编解码方法、装置及其设备 | |
| US20040156437A1 (en) | Method for encoding and decoding video information, a motion compensated video encoder and a corresponding decoder | |
| US8498338B1 (en) | Mode decision using approximate ½ pel interpolation | |
| US6785333B2 (en) | Motion vector coding method | |
| US20030156646A1 (en) | Multi-resolution motion estimation and compensation | |
| US20070268964A1 (en) | Unit co-location-based motion estimation | |
| US20110026599A1 (en) | Template-based pixel block processing | |
| JPH1169358A (ja) | 動画像の動きベクトル予測方法 | |
| JP2002532026A (ja) | 動き推定とブロックマッチング・パターンの改良 | |
| JP2003532309A (ja) | 適応動きベクトル場符号化 | |
| US8144766B2 (en) | Simple next search position selection for motion estimation iterative search | |
| Ribas-Corbera et al. | Optimizing motion-vector accuracy in block-based video coding | |
| EP1295483B1 (en) | Method of performing motion estimation | |
| Shen et al. | Benefits of adaptive motion accuracy in H. 26L video coding | |
| Pientka et al. | Deep video coding with gradient-descent optimized motion compensation and Lanczos filtering | |
| WO2023205371A1 (en) | Motion refinement for a co-located reference frame | |
| Winger et al. | Space-frequency motion model for subband/wavelet video coding | |
| Dane et al. | Efficient Motion Accuracy Search for Global Motion Vector Coding | |
| Farouk et al. | New fast adaptive matching criterion for block-based motion compensation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060929 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060929 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100413 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100610 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100803 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100928 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101019 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101019 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131029 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |