JP4539564B2 - 車両および車両の制御装置 - Google Patents
車両および車両の制御装置 Download PDFInfo
- Publication number
- JP4539564B2 JP4539564B2 JP2006006582A JP2006006582A JP4539564B2 JP 4539564 B2 JP4539564 B2 JP 4539564B2 JP 2006006582 A JP2006006582 A JP 2006006582A JP 2006006582 A JP2006006582 A JP 2006006582A JP 4539564 B2 JP4539564 B2 JP 4539564B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- motors
- drive wheels
- braking
- driving force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Retarders (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Arrangement Or Mounting Of Propulsion Units For Vehicles (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
一方、請求項6の発明は、車体に支持された少なくとも一組の左右の電動機と、前記左右の電動機の出力トルクがそれぞれ付与される左右の駆動輪と、前記左右の電動機と左右の駆動輪との間でそれぞれトルクを伝達する左右の伝動機構と、前記左右の電動機の回転をそれぞれ独立して制御することにより車両の駆動力および制動力を制御する制駆動力制御手段とを備えた車両において、前記左右の電動機は、それぞれの回転軸の軸線方向が互いに平行となるように前記車体に支持されるとともに該回転軸の回転方向が左右で逆になるように制御され、左右いずれか一方の前記伝動機構により左右いずれか一方の前記電動機の出力トルクの回転方向を反転して左右いずれか一方の前記駆動輪に伝達する反転手段を備えていることを特徴とする車両である。
また、請求項7の発明は、請求項6の発明において、前記左右の伝動機構が、回転軸回りの慣性モーメントが互いに等しくなるように構成されていることを特徴とする車両である。
そして、請求項8の発明は、請求項6または7の発明において、前記左右の電動機が、前記左右の駆動輪と共にサスペンションを介して前記車体に支持されたインホイールモータであることを特徴とする車両である。
一方、請求項6の発明によれば、左右の電動機の出力トルクのうち一方の回転方向が反転されて駆動輪に伝達される。したがって、左右の電動機が駆動トルクもしくは制動トルクを出力する際には、左右で互いに逆方向に回転制御される。そのため、電動機がトルクを出力する際に、左右の電動機が支持されている車体が受けるそれら左右の電動機の出力トルクに対する反力は、互いに逆方向となって、互いに打ち消し合い、もしくは相殺される。その結果、車体が電動機の出力トルクに対する反力を受けることによる運転者の意図しない車両挙動の変動、いわゆる車両姿勢の乱れを回避して、運転者に違和感を与えてしまうことを防止もしくは抑制することができる。
FL=(nL/r)・ML ・・・・・(1)
FR=−(nR/r)・MR ・・・・・(2)
として表される。通常走行時は、左右の駆動輪3,4における駆動力もしくは制動力FL,FRが等しくされるため、
FL=FR ・・・・・(3)
となる。このとき、左右のモータ6,7の出力トルクの反力によって、車体Boが受けるモーメント、いわゆるモータ反力ピッチモーメントMpは、
Mp=−(ML+MR) ・・・・・(4)
となり、上記の(1),(2),(3),(4)式より、モータ反力ピッチモーメントMpは、
Mp={(nL/nR)−1}・ML ・・・・・(5)
として表すことができる。
Claims (8)
- 車体に支持された少なくとも一組の左右の電動機と、前記左右の電動機の出力トルクがそれぞれ付与される左右の駆動輪と、前記左右の電動機と左右の駆動輪との間でそれぞれトルクを伝達する左右の変速機構と、前記左右の電動機の回転をそれぞれ独立して制御することにより車両の駆動力および制動力を制御する制駆動力制御手段とを備えた車両の制御装置において、
前記左右の電動機は、それぞれの回転軸の軸線方向が互いに平行となるように前記車体に支持されて、かつ該回転軸の回転方向が左右で逆になるように制御されるとともに、
前記左右の変速機構により前記左右の電動機の出力トルクをそれぞれ変更するとともに、左右いずれか一方の前記変速機構により左右いずれか一方の前記電動機の出力トルクの回転方向を反転して左右いずれか一方の前記駆動輪に伝達する反転手段と、
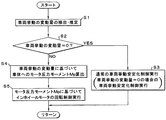
前記車両のピッチング方向もしくはローリング方向もしくはヨーイング方向における車両挙動の変動量を検出もしくは推定する車両挙動検出手段と、
前記車両挙動検出手段により検出もしくは推定された前記車両挙動の変動量に基づいて前記制駆動力制御手段と前記反転手段とを協調制御する車両挙動安定化手段と
を備えていることを特徴とする車両の制御装置。 - 前記車両挙動安定化手段は、前記車両挙動検出手段により検出された前記変動量が大きいほど、前記左右の電動機の出力トルクの大きさの差が大きくなるように前記制駆動力制御手段と前記反転手段とを協調制御する手段を含むことを特徴とする請求項1に記載の車両の制御装置。
- 前記車両挙動安定化手段は、前記左右の駆動輪の駆動力もしくは制動力が左右で互いに等しくなるように前記制駆動力制御手段と前記反転手段とを協調制御する手段を含むことを特徴とする請求項1または2に記載の車両の制御装置。
- 前記左右の変速機構は、回転軸回りの慣性モーメントが互いに等しくなるように構成されていることを特徴とする請求項1ないし3のいずれかに記載の車両の制御装置。
- 前記左右の電動機は、前記左右の駆動輪と共にサスペンションを介して前記車体に支持されたインホイールモータであることを特徴とする請求項1ないし4のいずれかに記載の車両の制御装置。
- 車体に支持された少なくとも一組の左右の電動機と、前記左右の電動機の出力トルクがそれぞれ付与される左右の駆動輪と、前記左右の電動機と左右の駆動輪との間でそれぞれトルクを伝達する左右の伝動機構と、前記左右の電動機の回転をそれぞれ独立して制御することにより車両の駆動力および制動力を制御する制駆動力制御手段とを備えた車両において、
前記左右の電動機は、それぞれの回転軸の軸線方向が互いに平行となるように前記車体に支持されるとともに該回転軸の回転方向が左右で逆になるように制御され、
左右いずれか一方の前記伝動機構により左右いずれか一方の前記電動機の出力トルクの回転方向を反転して左右いずれか一方の前記駆動輪に伝達する反転手段を備えている
ことを特徴とする車両。 - 前記左右の伝動機構は、回転軸回りの慣性モーメントが互いに等しくなるように構成されていることを特徴とする請求項6に記載の車両。
- 前記左右の電動機は、前記左右の駆動輪と共にサスペンションを介して前記車体に支持されたインホイールモータであることを特徴とする請求項6または7に記載の車両。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006006582A JP4539564B2 (ja) | 2006-01-13 | 2006-01-13 | 車両および車両の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006006582A JP4539564B2 (ja) | 2006-01-13 | 2006-01-13 | 車両および車両の制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007186130A JP2007186130A (ja) | 2007-07-26 |
| JP2007186130A5 JP2007186130A5 (ja) | 2008-04-24 |
| JP4539564B2 true JP4539564B2 (ja) | 2010-09-08 |
Family
ID=38341585
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006006582A Expired - Fee Related JP4539564B2 (ja) | 2006-01-13 | 2006-01-13 | 車両および車両の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4539564B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5171594B2 (ja) | 2008-12-15 | 2013-03-27 | 日立建機株式会社 | 電動車両及びそのピッチング制御装置 |
| KR20120138095A (ko) * | 2011-06-14 | 2012-12-24 | 주식회사 유디엠텍 | 인휠 모터 구동 전기자동차의 롤 운동 제어장치 |
| JP5487252B2 (ja) * | 2012-07-09 | 2014-05-07 | 日立建機株式会社 | 電動車両及びそのピッチング制御装置 |
| JP6217672B2 (ja) | 2015-03-06 | 2017-10-25 | 株式会社豊田中央研究所 | 駆動力配分装置 |
| JP6296016B2 (ja) * | 2015-07-30 | 2018-03-20 | トヨタ自動車株式会社 | 電動車両 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6212305A (ja) * | 1985-07-06 | 1987-01-21 | Toyota Motor Corp | 電気自動車のピツチング抑制装置 |
| JPH09280338A (ja) * | 1996-04-08 | 1997-10-28 | Toyota Motor Corp | 差動装置 |
| JP2005207953A (ja) * | 2004-01-23 | 2005-08-04 | Toyota Motor Corp | 路面摩擦係数検出装置 |
-
2006
- 2006-01-13 JP JP2006006582A patent/JP4539564B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6212305A (ja) * | 1985-07-06 | 1987-01-21 | Toyota Motor Corp | 電気自動車のピツチング抑制装置 |
| JPH09280338A (ja) * | 1996-04-08 | 1997-10-28 | Toyota Motor Corp | 差動装置 |
| JP2005207953A (ja) * | 2004-01-23 | 2005-08-04 | Toyota Motor Corp | 路面摩擦係数検出装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007186130A (ja) | 2007-07-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4839778B2 (ja) | 車両の制御装置 | |
| JP4887771B2 (ja) | 走行装置 | |
| US8783390B2 (en) | Vehicle drive apparatus | |
| JP4396660B2 (ja) | 車両の旋回挙動制御装置 | |
| CN102958717B (zh) | 车辆减振控制装置 | |
| CN104512276B (zh) | 车辆的制驱动力控制装置 | |
| JP2009273275A (ja) | 車両の制御装置 | |
| JP4876534B2 (ja) | 車両の制駆動力制御装置 | |
| JP4807030B2 (ja) | 制駆動制御装置 | |
| WO2013125287A1 (ja) | 電気自動車 | |
| JP5958489B2 (ja) | モータ駆動制御装置 | |
| JP5533405B2 (ja) | 車両の制駆動力制御装置 | |
| CN102958743B (zh) | 车辆的制动驱动力控制装置 | |
| WO2013069718A1 (ja) | 電気自動車 | |
| JP4534653B2 (ja) | 差動装置 | |
| JP4539564B2 (ja) | 車両および車両の制御装置 | |
| JP2010025272A (ja) | 車両用動力伝達装置の制御装置 | |
| JP2009133426A (ja) | 駆動力配分装置、駆動力配分装置の制御装置、制御方法およびその方法をコンピュータで実現されるプログラムならびにそのプログラムを記録した記録媒体 | |
| JP2009173089A (ja) | 車両の制御装置 | |
| JP4936851B2 (ja) | 車両および車両制御装置 | |
| WO2015002033A1 (ja) | 駆動トルク制御装置 | |
| JP2005184971A (ja) | 電動車両のモータ出力制御装置 | |
| JP2021066302A (ja) | 制動制御装置 | |
| JP5387471B2 (ja) | 左右独立駆動車両における電動機の制御装置 | |
| JP2006166572A (ja) | 車両の制御装置及び電気自動車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080307 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080307 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100330 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100507 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100601 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100614 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4539564 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130702 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |