JP4508549B2 - 画像記録装置及びその制御方法 - Google Patents
画像記録装置及びその制御方法 Download PDFInfo
- Publication number
- JP4508549B2 JP4508549B2 JP2003135796A JP2003135796A JP4508549B2 JP 4508549 B2 JP4508549 B2 JP 4508549B2 JP 2003135796 A JP2003135796 A JP 2003135796A JP 2003135796 A JP2003135796 A JP 2003135796A JP 4508549 B2 JP4508549 B2 JP 4508549B2
- Authority
- JP
- Japan
- Prior art keywords
- recording
- data
- image
- scanning direction
- resolution
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J19/00—Character- or line-spacing mechanisms
- B41J19/18—Character-spacing or back-spacing mechanisms; Carriage return or release devices therefor
- B41J19/20—Positive-feed character-spacing mechanisms
- B41J19/202—Drive control means for carriage movement
Description
【発明の属する技術分野】
本発明は、ホストコンピュータなどから入力される画像データに基づいて記録媒体上に画像記録(描画)する画像記録装置、その制御方法、および制御プログラムに関し、特にガラス基板、フィルムなどの記録媒体上に複数の記録ヘッドに設けられたノズルから複数色のインクを吐出させて画像を記録する画像記録装置、その制御方法、および制御プログラムに関する。
【0002】
【従来の技術】
図9に従来のカラーインクジェット記録方式を用いた画像記録装置の概略図を示す。
【0003】
図9の画像記録装置では、プラテン106上の記録媒体140に画像記録(描画)するに際し、まずモータ103を駆動し、駆動ベルト109によって記録ヘッド120〜123を搭載したキャリッジ102を原点センサー108の位置まで移動させた後、次に、キャリッジ102を矢印X1で示す走査方向の往路方向に移動させながら、入力される画像データに応じて所定位置よりブラックK・シアンC、マゼンタM、イエローYの各インクをそれぞれ記録ヘッド120、121、122、123から吐出させることにより所定の画像133を記録する。
【0004】
そして、図9の134に示す予め設定した所定の長さ分の画像133の記録を終了すると、キャリッジ102のX1で示す走査方向の往路への移動を停止し、次にキャリッジ102を矢印X2で示す走査方向の往路と逆の復路に移動させながら、キャリッジ102を、次の画像記録走査のためのスタート位置(原点センサー108の位置)まで復帰させる。この復路方向へのキャリッジ102を移動させる間に、フィードモータ107によってフィードローラ106および110を回転させ、記録ヘッド120〜123で画像記録した幅134に相当する長さ分だけ記録媒体140を、記録媒体140を主走査方向と直交する方向である副走査方向(矢印Y方向)へと搬送する。
【0005】
以上述べたように主走査方向へキャリッジ102を移動しながら画像を記録媒体に記録し、次に記録媒体を1バンドの幅134だけ副走査方向ね搬送する動作を繰り返すことでカラー画像の画像記録を完成する。
【0006】
以上の説明では主走査方向の往路の一方向での画像記録動作を例にとり説明したが、主走査方向の往路および復路の双方向の画像記録動作も可能であって、その場合には往路における画像記録をした後、記録ヘッド120〜123で画像記録した1バンドに幅134に相当する長さ分だけ記録媒体140を副走査方向に搬送してから主走査方向の復路における画像記録を実行すれば往路および復路の双路での画像記録をすることができる。なお、図中、100および101はフィード第2ローラ、111は媒体検知センサーをそれぞれ示している。
【0007】
また、記録ヘッド120〜123の各ノズルからのインクの吐出タイミングは、後述のリニアエンコーダからの出力信号を基準として生成される。各記録ヘッドの位置は、リニアエンコーダによって検出されるようになっており、このリニアエンコーダは、必要とする解像度(例えば、1200dpi)に対応する精度で位置を検知し得るものとなっている。従って、こうしたリニアエンコーダを有する画像記録装置では、リニアエンコーダから出力される位置検知信号によって画像記録の解像度と画像記録位置の精度とが決定されることとなる。
【0008】
このため、上記のような画像記録装置では、上記リニアエンコーダからの位置情報と各記録ヘッド120、121、122、123との相対位置から、同じ画素に対応する画像データ(記録データ)に関して、記録ヘッド120、121、122、123から吐出するブラック(K)、シアン(C)、マゼンタ(M)、イエロー(Y)の各インクを重ねることにより、多色画像記録を実現するようになっているため、リニアエンコーダ130からの位置情報は、画像品質に極めて大きく影響する。
【0009】
現在、上記のような画像記録装置に用いるリニアエンコーダとしては磁気式のものと、図9に示す光学式のもの130とが一般に用いられている。例えば、磁気式のリニアエンコーダはスケール単位で多数の着磁個所を形成してなる金属製のリニアスケール板と、キャリッジ102上に取り付けられ、前記リニアスケール板の着磁個所における磁気を検知する磁気センサ部とから構成される。
【0010】
また光学式のリニアエンコーダ130は、図9に示すように、低膨張率のガラスにスケール単位で光の反射部と非反射部とを交互に印刷形成してなる帯状の目盛格子付きのスケール131と、このスケール131に対する光の照射及びスケール131からの反射光を受光するセンサー部132とにより構成されている。このセンサー部132としては、例えば、キャリッジ102上に取り付けられたLEDやレーザ光源などからなる投光部と、フォトダイオードやフォトトランジスタなどからなる受光部とにより構成されたもの(投受光器)が一般に用いられている。
【0011】
そして、磁気式および光学式のいずれの方式を用いたリニアエンコーダにあっても、ホームポジションを基準位置とし、主走査キャリッジ102の移動によりリニアスケール単位で出力されるセンサー部からの読み取りパルス信号をエンコーダカウンタによりアップ/ダウンカウントし、そのカウント値を読み出すことによってキャリッジ102の位置情報を得ることができるようになっている。(例えば、特許文献1)。
【0012】
【特許文献1】
特開2000−168151号公報
【0013】
【発明が解決しようとする課題】
しかしながら、上記のような画像記録装置ではリニアエンコーダの分解能が1200dpiであれば300dpi系すなわち、1200dpi、600dpi、300dpiの解像度で画像記録することができるが、1440dpiや720dpiの解像度で画像記録することはできない。
【0014】
一般に画像記録装置の解像度には300、600、1200、・・・・の300dpi系と360、720、1440、・・・・の360dpi系の2種があって画像記録に使われる記録ヘッドのノズル間隔もそのどちらかで形成されることがほとんどである。
【0015】
しかし、最近では液晶フィルタを作成する画像記録装置のように上記300dpi系、360dpi系の系列以外の任意の解像度で画像記録する場合もある。
この液晶フィルタを作成する画像記録装置の場合には、記録媒体に吐出されたインクドットの着弾精度も数μm程度と高精度が要求されるため画像記録装置単価も高価となる。そのため、一台で上記300dpi系、360dpi系など様々な解像度の画像記録ができる画像記録装置が望まれていた。
【0016】
一方、上記説明したいずれの方式のエンコーダにおいても、エンコーダ製作時の部品・組立精度やスケールのパターニング精度などに起因する読み取り位置誤差、さらにはスケール自体の熱膨張による読み取り位置誤差が生じる。これらの位置誤差は、通常のインクジェットプリンタでは、無視できうる範囲であるが、液晶フィルタ製造用の画像記録(描画)装置では、液晶フィルタのパターンが高密度であるため、インクを高精度で目的位置に着弾させる必要がある。これを実現するためには、エンコーダ製作時の部品・組立精度やスケールのパターニング精度などに起因するエンコーダの読み取り位置誤差を許容範囲内に収めたり、エンコーダスケールの熱膨張によって発生する位置誤差の補正や、キャリッジおよび記録媒体の移動手段が持つピッチング、ヨーイング、真直度などに起因する送り誤差を補正して、インクの着弾位置の誤差を許容範囲内に収める必要がある。
【0017】
本発明は上記説明した従来技術の問題点を克服することを第1歩としてなされたものであり、その目的は、一台で300dpi系、360dpi系など様々な解像度の画像を記録できる画像記録装置及びその制御方法を提供することである。
【0018】
【課題を解決するための手段】
上記目的を達成するための本発明に係る一実施形態の画像記録装置は、以下の構成を有する。すなわち、記録ヘッドを搭載したキャリッジを記録媒体を搬送する搬送方向と直交する方向に走査させ、入力される記録データに基づいて記録を行う画像記録装置であって、前記記録データを格納するバッファメモリと、前記記録ヘッドを駆動する記録ヘッド駆動手段と、前記記録媒体に対して走査する記録ヘッドの走査方向の位置を検出して、前記記録データの前記走査方向の解像度より高い解像度の位置信号を生成する位置検出手段と、記録位置を示す記録位置データと非記録位置を示す非記録位置データとを前記記録データの解像度に対応させて生成し、生成した前記記録位置データと前記非記録位置データとを、前記記録データの解像度と前記位置信号の解像度と前記記録ヘッドの前記走査方向の記録範囲とに基づき、記憶手段の予め定められた数のアドレスに含まれるアドレス領域に予め書き込む記録位置制御手段と、前記記録を行うときに、前記位置検出手段により生成された前記位置信号の入力に従って前記記憶手段の前記アドレス領域に含まれる予め定められた数のアドレスを順にアクセスし、前記アドレス領域から前記記録位置データを読み出すたびに、前記記録ヘッドを駆動させる記録位置信号を出力する記録位置信号発生手段と、前記記録位置信号に同期して前記バッファメモリから前記記録ヘッド駆動手段へ前記画像データを転送する転送手段と、を有することを特徴とする。
【0019】
上記目的を達成するための本発明に係る一実施形態の画像記録装置の制御方法は、以下の構成を有する。すなわち、記録ヘッドを搭載したキャリッジを記録媒体を搬送する搬送方向と直交する方向に走査させ、入力される記録データに基づいて記録を行う画像記録装置の制御方法であって、前記画像記録装置は、前記記録データを格納するバッファメモリと、前記記録ヘッドを駆動する記録ヘッド駆動手段とを有し、前記記録媒体に対して走査する記録ヘッドの走査方向の位置を検出して、前記記録データの前記走査方向の解像度より高い解像度の位置信号を生成する位置検出工程と、記録位置を示す記録位置データと非記録位置を示す非記録位置データとを前記記録データの解像度に対応させて生成し、生成した前記記録位置データと前記非記録位置データとを、前記記録データの解像度と前記位置信号の解像度と前記記録ヘッドの前記走査方向の記録範囲とに基づき、記憶手段の予め定められた数のアドレスに含まれるアドレス領域に予め書き込む記録位置制御工程と、前記記録を行うときに、前記位置検出工程により生成された前記位置信号の入力に従って前記記憶手段の前記アドレス領域に含まれる予め定められた数のアドレスを順にアクセスし、前記アドレス領域から前記記録位置データを読み出すたびに、前記記録ヘッドを駆動させる記録位置信号を出力する記録位置信号発生工程と、前記記録位置信号に同期して前記バッファメモリから前記記録ヘッド駆動手段へ前記画像データを転送する転送工程と、を有することを特徴とする。
【0024】
【発明の実施の形態】
以上説明したように本発明は様々な態様によって実施されるが、これらの態様のおのおのは、さらに具体的に言えば、以下のような構成を持つことが望ましい。
【0025】
ここで、例えば、さらに、記録データを格納するバッファメモリと記録ヘッド駆動部を備え、前記記録位置信号に同期して前記バッファメモリから前記記録ヘッド駆動部へ転送する転送手段を備えることが好ましい。
【0026】
ここで、例えば、前記記録位置制御手段は、前記記録ヘッドの走査方向の往路と復路とで前記記録ヘッドを駆動させる位置が異なるように前記記録位置情報を生成し、該生成した情報を前記記憶手段の異なる記憶領域に書き込むことが好ましい。
【0027】
ここで、例えば、前記スケール周辺の環境温度を検出する温度検出手段を更に有し、前記記録位置制御手段は、前記検出された環境温度に応じて前記記録位置情報を補正し、該補正した記録位置情報を前記記憶手段に書き込むことが好ましい。
【0028】
ここで、例えば、前記記録ヘッドの走査方向の各位置における前記記録位置情報を補正する位置ずれ情報を前記記憶手段の所定領域に書き込む補正情報制御手段を更に有し、前記記録位置制御手段は、前記位置ずれ情報に応じて前記記録位置情報を補正することが好ましい。
【0029】
ここで、例えば、前記記録ヘッドを複数有し、前記複数の記録ヘッドごとに前記記録位置情報が独立して前記記憶手段の所定の記憶領域に記憶されていることが好ましい。
【0030】
以下添付図面を参照して本発明の好適な実施形態について詳細に説明する。
【0031】
なお、以下に説明する実施形態では、インクジェット記録方式を用いた記録装置としてインクジェットプリンタを例に挙げ説明する。
【0032】
本明細書において、「記録」(「描画」「印字」という場合もある)とは、文字、図形等有意の情報を形成する場合のみならず、有意無意を問わず、また人間が視覚で知覚し得るように顕在化したものであるか否かを問わず、広く記録媒体上に画像、模様、パターン等を形成する、または媒体の加工を行う場合も示すものとする。
【0033】
また、「記録媒体」とは、一般的な記録装置で用いられる紙のみならず、広く、布、プラスチック・フィルム、金属板、ガラス、セラミックス、木材、皮革等、インクを受容可能なものも示すものとする。
【0034】
さらに、「インク」(「液体」と言う場合もある)とは、上記「記録(描画)」の定義と同様広く解釈されるべきもので、記録媒体上に付与されることによって、画像、模様、パターン等の形成または記録媒体の加工、或いはインクの処理(例えば記録媒体に付与されるインク中の色剤の凝固または不溶化)に供され得る液体を示すものとする。
【0035】
<第1の実施形態>
まず、本発明の第1の実施形態のインクジェットプリンタおよびその制御方法について説明する。
【0036】
[インクジェットプリンタ:図8]
図8は本発明の実施形態におけるインクジェットプリンタの全体構成図である。
【0037】
図8に示す本実施形態のインクジェットプリンタは、図9で説明した従来のインクジェットプリンタと類似した構成を有している。すなわち、図8で示されるインクジェットプリンタは、図9を用いて説明した従来のインクジェットプリンタと同様の記録ヘッド及びその移動等を司る各種機構部等を有しており、熱エネルギーを利用してインクに気泡を生じさせ、 その気泡の圧力によってインクを吐出させるインクジェット方式のカラープリンタである点は共通である。
【0038】
そこで、以下の説明では、図8に示す本実施形態のインクジェットプリンタが図9を用いてすでに説明した従来のインクジェットプリンタと共通する部分については、重複するので、同じ符号を付してその説明を省略し、異なる点についてのみ説明する。
【0039】
図8のインクジェットプリンタが図9に示す従来のインクジェットプリンタと異なる点は、リニアエンコーダ1130の分解能が0.5μmと従来のインクジェットプリンタのリニアエンコーダの分解能(例えば、1200dpiでは、分解能は21.2μm)に対して、数十倍の高分解能を有するスケールを使用している点である。これにより、従来よりも高い精度で、記録ヘッドの位置を検出できる。
【0040】
本実施形態のインクジェットプリンタでは、この高分解能のリニアエンコーダ1130より得られる記録ヘッドの位置情報に基づいて、後述する任意の解像度での画像記録が可能である。また、リニアエンコーダ1130のスケール1131の設置個所近傍には、図8に示すように環境温度を検出する温度検出部19を設けられている点も異なっており、本実施形態のインクジェットプリンタでは、この温度検出部19によりリニアエンコーダ1130のスケール1131の環境温度による変化を補正して更に高精度の画像記録も可能である。
【0041】
[画像記録動作:図1]
次に、図1を参照して、第1の実施形態の画像記録装置であるインクジェットプリンタの画像記録動作について説明する。
【0042】
図1は、第1の実施形態のインクジェットプリンタの全体ブロック図である。機構部16は、記録ヘッド120、121、122、123を主走査方向(X1、X2方向)に移動させるためのキャリッジ駆動部(キャリッジ102、モータ103)、フィルムやガラス基板などの記録媒体140を副走査方向(Y方向)に搬送する搬送部(モータ107、ローラ101等)、記録媒体140を供給し排出する供給部と排出部、および記録ヘッドのインク詰りを回復する回復ユニット部等から構成されている。
【0043】
主制御部14は、記録ヘッド120〜123および機構部16等をはじめとする本インクジェットプリンタ全体を制御する中枢部分であり、CPUおよび各種の制御プログラムなどを格納してなるROM、種々のデータなどの書き込みと読み出しなどを行う作業用RAMなどから構成されている。
【0044】
主制御部14は、機構部16に対して制御信号を出力してキャリッジ102の移動や記録媒体140の移動などの機構制御を行い、さらに、記録ヘッド駆動部12、メモリ制御部20、さらには記録位置信号発生部11とも密接に信号のやり取りをして記録ヘッド120、121、122、123の駆動を制御する。
【0045】
I/F部17は、不図示のホストコンピュータと本インクジェットプリンタとのインターフェース部分でホストコンピュータからコマンドおよび画像データを受信する。
【0046】
メモリ制御部20は、I/F部17から入力されたコマンドを主制御部14に転送すると共に、主制御部14の制御の下で画像データをバッファメモリ15に書き込むようアドレスと書き込みタイミング信号を生成する。温度検出部19によって検出されたリニアエンコーダ1130のスケール1131の近傍の温度は、主制御部14に送信される。
【0047】
主制御部14は、I/F部17から入力されたコマンドを解読し、その結果により画像記録速度や画像記録解像度などの画像記録条件を設定して、その画像記録条件によって機構部16および記録位置信号発生部11を制御して所望の条件で画像を記録する。
【0048】
一方、不図示のホストコンピュータから受信した画像データは、一時メモリであるバッファメモリ15に記憶されたあと、主制御部14から指令を受けたメモリ制御部20の制御により、記録ヘッド駆動部12に転送される。
【0049】
記録ヘッド駆動部12は、記録位置信号発生部11から出力される画像記録位置信号に同期してバッファメモリ15から転送された画像データ(記録データ)にしたがって記録ヘッドの各ノズルを駆動して画像を記録する。
【0050】
ここで、バッファメモリ15は、記録ヘッド120、121、122、123が主走査方向に1回走査して画像を記録するために必要とされる1バンド分以上の画像データを格納し得る記憶容量を備えたメモリから構成されている。この1バンドのデータは、ノズルの並びに対応したカラム形式で格納されている。
【0051】
例えば、各記録ヘッドの副走査方向のノズル数が128ノズルで、主走査方向に1回スキャンで画像記録できる最大ドット数が8kドットであるとすれば、バッファメモリ15のメモリは、128(ノズル)×8000(ドット)×4(色)=4,096,000(4MBit以上)の記憶容量を持つことになる。
【0052】
なお、I/F部17は、転送する画像データが膨大な上、インクジェットプリンタのスループットが要求されるため、例えば、セントロニクスインターフェース、SCSIインターフェースのほか最近ではIEEE1394などの高速のインターフェースを用いてもよい。
【0053】
また、本実施形態の機構部16では、キャリッジ駆動手段と記録媒体搬送手段として駆動ベルト109やフィード第2ローラ100、101をモータで駆動する方法が採用されているが、より高い画像記録精度が要求される場合には、リニアモータにより直接移動させるタイプのXYステージを使用しても良い。
【0054】
[画像記録位置の制御方法:図2]
次に、本願の主題である画像データの解像度に応じた任意の解像度での画像記録位置の制御方法について説明する。
【0055】
図2AおよびBは、リニアエンコーダ1130の出力信号を示す図であり、リニアエンコーダ1130より位相の90°ずれた2つの信号A、Bが生成され、図2Aは、キャリッジ102が往路方向動作時に生成される信号A、Bを、図2Bは、キャリッジ102が復路方向動作時に生成される信号A、Bををそれぞれ示している。
【0056】
図2Aに示すように、信号Aの位相が信号Bの位相より90°進んでいる時は、キャリッジ102が往路方向に移動しているため、各信号の立ち上がりおよび立ち下がりエッジに応じてカウントアップを行う。また、図2Bに示すように、位相が90°遅れている時は、キャリッジ102が復路方向に移動しているため、カウントダウンする。このようにして、キャリッジ102の位置を検知することができる。
【0057】
図1の記録ヘッド位置検出部10は、上記説明したリニアエンコーダ1130からのA、B2つの信号と原点センサー108から出力される原点信号Zを受けて実際にキャリッジ102の主走査方向の絶対位置を検出する。
【0058】
[記録ヘッド位置検出部:図3]
図3は、記録ヘッド位置検出部10の回路の一例を示すものであり、リニアエンコーダ1130からの信号A、Bと原点センサー108からの原点信号Z、それにロジックのタイミング同期を取るためのクロック(CLK)に基づいて、カウント信号(PLS)とアップ/ダウン信号、すなわち移動方向信号(DIR)を生成する。
【0059】
図3中の201〜204で構成される回路がAの立ち上がりおよび立ち下がりのタイミングを検出する部分であり、Aの立ち上がりタイミングに同期したパルスが203の出力から、立ち下がりタイミングに同期したパルスが204から出力される。
【0060】
同様にして、図3中の205〜208で構成される回路がBの立ち上がりおよび立ち下がりのタイミングを検出する部分であり、Bの立ち上がりタイミングに同期したパルスが207の出力から、立ち下がりタイミングに同期したパルスが208から出力される。
【0061】
[タイミングチャート:図4]
図4は、そのタイミングチャートである。
【0062】
図4において、最初Aの位相がBの位相より90°進んでいるので、移動方向信号DIRが往方向(LOレベル)となり、図4の途中から位相が逆に90°遅れているので移動方向信号DIRが復方向(HIGHレベル)になっていることが分かる。
【0063】
また、カウント信号PLSは、A、B2つの信号の立ち上がりおよび立ち下がりのタイミングでパルスが出力されており、1パルス発生する毎に0.5μm移動したことを表している。すなわち、0.5μm/カウントの高精度でキャリッジの主走査方向の絶対位置を検出できる。
【0064】
これらの信号、すなわち原点信号Z、カウント信号PLS、移動方向信号DIRは、図3に示すアップダウンカウンタ210のリセット(CLR)、クロック(CK)、アップダウン(UP/DW)の各々の入力信号に接続されている。
【0065】
主制御部14の初期化命令によって、キャリッジ102が原点位置に移動すると、原点信号Zがアクティブになって、カウント出力がクリア(カウント値=0)され、以後カウント値=0を原点とし、キャリッジ位置をカウント値として記録位置信号発生部11に出力する。
【0066】
[記録位置発生部:図5]
図5は、記録位置信号発生部11のブロック図であり、図3の記録ヘッド位置検出部10で生成されたカウント値は、RAM300の対応するアドレスの記憶領域にアクセスするためのアドレス入力にセレクタ301経由で接続されている。
【0067】
このRAM300の各アドレスの記憶領域には、主制御部14内のCPUから直接リード/ライトができるように、アドレスバスはセレクタ301のもう一方の入力を経由してRAM300のアドレス入力ABに,そしてデータバスおよびアクセス信号はそれぞれRAM300のデータバスDBおよびR/Wに接続されている。
【0068】
主制御部14からRAM300の各所定領域にデータを書き込む場合には、セレクタ301をCPU側にし、画像記録動作中はカウント値がRAM300のアドレス入力となるようにセレクタ301を切り替えればキャリッジ102の移動にしたがってキャリッジ位置(カウント値)に対応したRAM300のアドレスに記憶されているデータ(記録位置データ)が記録ヘッド駆動部12に出力される。
【0069】
ここで、RAM300に予め主制御部14のCPUから記録位置データを格納し、キャリッジの移動とともに、RAM300のアドレスを順に読み出しを行う。そして記録すべき位置に対応するアドレスには、記録位置データとして"1"が格納されているので、この"1"が読み出されることで記録ヘッド駆動部12に記録位置パルスが出力され、記録ヘッド駆動部12はこの記録位置パルスを受けると記録ヘッド13を駆動してインクを記録媒体140に吐出する。
【0070】
例えば、1回の主走査記録において、2880カラムの記録がなされる場合、RAM300に2880個の記録位置データの"1"が格納されている。そして、そして記録位置データの"1"が読み出されるたびに、バッファメモリ15の記録位置に対応するアドレスから1カラム分の記録データが読み出される。
【0071】
[記録位置パルス:図6]
図6は、記録位置パルスのタイミングを表す図である。
【0072】
図6で、アドレス(RAM)および記録位置データ(RAM)は、RAM300のアドレスとそのアドレスに記憶されている記録位置データを表しており、RAM300に書き込まれている往復2ビットのデータがどのように書き込まれているかを表している。
【0073】
また、図6中の記録位置パルスは、記録ヘッド駆動部12に記録タイミングを与えるパルス信号でキャリッジが移動すると図6に示すように主走査方向の往路、復路で対応するビットが選択されて別々のパルス出力を得ることができる。
【0074】
ところで、図6の中で主走査方向の往路と復路のパルスの出力タイミングが一致していない。これは主走査方向の往路と復路で同じタイミングで記録ヘッドを駆動しても記録ヘッドから吐出されたインク滴が記録媒体上に到達するためには所定の時間を要するために主走査方向の往路と復路でインク滴の着弾位置がずれてしまうからである。そのため、予め主走査方向の往路と復路で異なるように、RAM300に格納するアドレスを異ならせて、記録位置パルスのタイミングが設定されている。
【0075】
なお図6は、主走査方向の往路と復路で画像記録する双方向画像記録の場合を例にとり、記録位置パルスのタイミングを説明したが、例えば、往路のみでしか画像記録をしない一方向画像記録の場合には、復路のビットを全て0に設定すればよい。この場合には、復路にキャリッジが移動しているときには、記録位置パルスが出力されない。
【0076】
なお、図6では、便宜上RAM300のデータと記録位置パルスは、往復1セットのみしか記述していないが、本実施形態のように記録ヘッドが120〜123と4個ある場合には、RAM300のデータビット数を増やして4セット分発生させるようにすれば良い。
【0077】
[記録位置データの作成方法]
以上、記録ヘッド駆動部12に出力する画像記録タイミングを0.5μm/カウントの高精度で生成する方法について説明したが、次に受信した記録データの解像度に対応する解像度で画像記録できるように、各解像度に応じた記録位置データをRAM300に書き込む作成方法について説明する。
【0078】
まず、単純に記録データにより指定された解像度で画像記録する場合の画像記録位置データの作成方法を説明する。
【0079】
画像記録開始位置をLs[μm]、解像度ピッチをPr[μm]、リニアエンコーダの分解能をEr[μm]としたとき、画像記録開始位置からn番目、すなわちnカラム目の画像記録位置に対応するRAMのアドレスをAnとすると、Anは、
An=(Ls+n×Pr)/Er (1)
となり、RAM300の内容をすべて0クリアしたあと、上記の式に従って、全ての画像記録位置数分のnに対してAnを求め、RAM300のアドレスAnに対応するデータの所望のビットに画像記録を示す"1"を書き込めば、所望の画像記録解像度で画像記録パルスを発生させることができる。そして、記録位置データのRAM300に格納されている"1"の読み出しに対応して、バッファメモリから画像データの読み出しを行い、記録ヘッド駆動部に転送される。この画像データの値に対応して、記録ヘッドのノズルからインクが吐出される。
【0080】
したがって、第1実施形態のインクジェットプリンタは、0.5μm/カウンタの高精度で記録ヘッドの位置検出ができ、かつ、(1)を用いて、受信した記録データから画像を記録する際に、その記録データの解像度に適した画像記録位置データを生成することができるので、従来行うことができなかった一台のインクジェットプリンタで300dpi系と360dpi系とのどちらの解像度の画像記録をも行うことができる。
【0081】
[エンコーダスケールの熱膨張による誤差の補正]
次に、上記説明した記録位置データのエンコーダスケールの熱膨張による誤差を補正して、更に高精度で画像記録する方法について説明する。
【0082】
前述のようにエンコーダスケール1131の近傍には温度検出部19が配置されており、その温度データは主制御部14で読み込めるようになっている。よって、主制御部14は、その温度値に基づいて記録位置データを補正すれば、エンコーダスケールの熱膨張による誤差補正を行うことができる。
【0083】
温度検出部19の示す温度値をT[℃]、エンコーダの校正データを測定した温度、すなわち基準温度をTo[℃]、エンコーダスケール1131の熱膨張係数をkとすると、Anは、
An=(Ls+n×Pr)×{1+k×(T−To)}/Er (2)
となり、熱膨張が無い場合に説明したのと同様の方法で、全ての画像記録位置数分のnに対してAnを求め、RAM300のアドレスAnに対応するデータの所望のビットに画像記録を示す1を書き込めば、エンコーダスケール1131の熱膨張による誤差補正がなされ、正しい位置に画像記録されることになる。
【0084】
[リニアエンコーダのポジション信号のずれ補正]
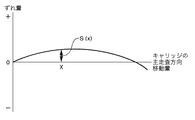
次に、図7のように実際のキャリッジ移動量に対してエンコーダ製作時の部品・組立精度やスケールのパターニング精度などの原因によりリニアエンコーダのポジション信号がずれて出力されている場合の記録位置データを補正して、更に高精度で画像記録する方法について説明する。
【0085】
図7において、横軸はキャリッジ102の実際の主走査方向の移動量(x)であり、縦軸はリニアエンコーダ130の各ポジション信号の各真値からのずれ量(S(x))を示す。このS(x)は関数である。
【0086】
キャリッジ102の原点から主走査方向への移動量xのときの真値からのずれ量(位置ずれ量)をS(x)とすると、画像記録開始位置からn番目の画像記録位置におけるずれ量は、S(Ls+n×Pr)であることから、Anは、
An={(Ls+n×Pr)−S(Ls+n×Pr)}/Er (3)
となる。
【0087】
[熱膨張による誤差補正+ポジション信号のずれ補正]
リニアエンコーダのポジション信号がずれて出力され場合の補正にリニアスケール131の熱膨張誤差の補正を加えると、
An={(Ls+n×Pr)−S(Ls+n×Pr)}×{1+k×(T−To)}/Er (4)
となり、任意の画像記録解像度でエンコーダスケール131の熱膨張誤差とキャリッジ(記録ヘッド)のポジション信号のずれ補正を同時に行うことが可能である。
【0088】
なお、図7に示すキャリッジの主走査方向への移動量xとずれ量S(x)の関係は予めキャリッジを移動させながら各移動量xにおける真値からのずれ量S(x)を実測しておけばよい。そして、このずれ量を記憶手段に格納しておけば、補正を容易に行うことが出来る。このずれ量の測定方法は周知の位置測定技術を用いて行うことができる。
【0089】
なお、実施形態ではリニアエンコーダ130の分解能は0.5μmであるので、画像記録位置の設定は、最大±0.5μmの誤差を生じるが、最大±0.5μmの誤差は、例えば、2400dpiの解像度ピッチ10.6μmの±5%以下(すなわち、±0.53μm以下)なので問題とはならない。また将来、解像度が向上する場合には、例えば、0.1μm分解能のリニアエンコーダを使用することにより、誤差を許容範囲(例えば、±0.1μm程度)に収めることが可能である。
【0090】
上記説明した本実施形態のインクジェットプリンタでは、14インチの液晶フィルタに対応するため、キャリッジの移動範囲が600mm程度ある。そのため、記録位置信号発生部11で使用されるRAM300の容量は、600mm/0.5μmとなり、1.2Mバイト程度で4Mビットのスタティックメモリ数個で実現できる規模なので特に問題にはならない。
【0091】
また、上記説明した本実施形態では、複数の記録ヘッドを有するカラーインクジェットプリンタを例に取り説明したが、本発明はカラーインクジェットプリンタに限らず、一般に市販されるインクジェットプリンタや他の画像記録方式をとる画像記録装置、例えば熱転写方式を用いた画像記録装置あるいは一般のプリンタにも適用可能であり、本発明は特に上記各実施形態に限定されるものではない。
【0092】
[画像記録の処理:図10]
図10は、上記説明した第1の実施形態のインクジェットプリンタによる画像記録の処理の一例として、走査方向の往路のみの記録(片方向記録)を行う場合の処理を示したものであり、受信した記録データから画像を作成する際に、受信した記録データの解像度を検出し、その解像度に適した画像記録を行う処理を示すとともに、さらに高精度で画像記録を行うために、環境温度の変化に伴う画像記録位置の読み取り誤差を補正する処理や、記録ヘッドの各位置における位置ずれを補正する処理を示している。なお、図10の画像記録の処理は一例であり、図10を応用することにより、走査方向の往路と復路で記録を行う(双方向記録)場合にも適応できる。
【0093】
図10の処理は、主制御部14のROMに格納された制御プログラムに基づいて主制御部14がRAMを作業領域として用い、各部を制御しながら実行するものである。以下、その一例を具体的に説明する。
【0094】
まず、ステップS501において、記録データを受信すると、記録データをメモリに格納すると共に記録データから記録する画像の解像度を検出する。
【0095】
次に、ステップS502において、検出された解像度に適した画像記録を行えるように、検出された解像度に応じた画像記録位置データとして画像記録開始位置からn番目の画像記録位置Anを生成する。
【0096】
次に、ステップS503において、画像記録位置データに各位置における補正を行うか判断する。補正をするならば(YES)、ステップS504に進み位置補正を行う。そしてステップS505に進む。位置補正をしない場合(NO)には、何もしないでステップS505に進む。
【0097】
次に、ステップS505において、記録位置データについて環境温度による補正をする場合(YES)には、ステップS506に進み環境温度による補正を行う。その後ステップS507に進む。環境温度による補正をしない場合(NO)には、ステップS507に進む。
【0098】
次に、ステップS507では、記録ヘッドの走査方向の往路、復路別にRAMのアドレスAnに"1"を書き込む。(ここで、"1"は記録位置を示し、"0"は記録位置でないことを示す。)
次に、ステップS508でキャリッジを駆動開始すると、ステップS509で記録位置の位置を検出してカウント値を出力し、次にステップS510でカウント値に対応するRAMのアドレスにアクセスし画像記録位置であれば記録位置パルスを発生し画像記録を行ってからステップS511に進む。
【0099】
次にステップS511では1バンドの画像記録が終了していない場合にはステップS509に戻り上記説明した処理を繰り返し行い、1バンドの画像記録が終了した場合にはステップS512に進みキャリッジをホームポジションに戻したから一連の作業を終了する。
【0100】
以上説明したように本実施形態のインクジェットプリンタは高分解能のリニアエンコーダを用いて記録ヘッドの位置を従来のインクジェットプリンタに比べて数十倍の精度で検出することができ、さらに、受信した記録データから画像を記録する際に、受信した記録データの解像度に適した画像記録位置データを生成して画像記録することができるので、一台で300dpi系および360dpi系のどちらの解像度の画像記録を行うことができる。また、メモリの容量やメモリアクセスが間に合えば他の解像度でも画像記録をおこなうことができる。また、記録位置情報として"1"を記録位置、"0"は非記録位置として制御しているが、他のデータを用いてもかまわない。"0"を記録位置、"1"は非記録位置として制御しても構わない。
【0101】
また、必要に応じて、環境温度に応じて発生するリニアエンコーダにの誤差を補正したり、エンコーダ製作時の部品・組立の精度やスケールのパターニング精度などに起因するポジション信号のずれを補正をすることもできるので、さらに高精度の画像を記録することもできる。
【0102】
<第2の実施形態>
次に、本発明の第2の実施形態のインクジェットプリンタおよびその制御方法について説明する。なお、以下の説明では第1の実施形態のインクジェットプリンタと共通する部分の説明は同じ符号を付してその説明を省略し、異なる部分の説明を中心に行う。
【0103】
[画像記録装置の構成:図11]
図11は本発明の第2の実施形態におけるインクジェットプリンタの全体構成図である。図11に示すインクジェットプリンタは、図9で説明した従来のインクジェットプリンタに比べ、記録媒体に着弾するインクの着弾位置の位置ずれが少ないように工夫されている。
【0104】
この点について詳しく説明すると、第2の実施形態のリニアエンコーダ1130および1131の分解能は0.5μmであり、図9の従来のインクジェットプリンタの分解能(例えば、1200dpiでは、分解能は21.2μm)に対して、数十倍の高分解能を有している。この高い精度で記録ヘッドの位置を検出できるように、図11のインクジェットプリンタは、キャリッジ1102および記録媒体140の移動手段に高精度のCRリニアモータ1001を採用し、記録媒体140を表面精度の良いステージ1003上に固定して移動するようにしている。
【0105】
すなわち、従来のインクジェットプリンタではモータ103と駆動ベルト109によってキャリッジ102を主走査方向に移動していたが、本実施形態のインクジェットプリンタではキャリッジ1102の移動手段として高精度のCRリニアモータ1001を使用している。また、従来のインクジェットプリンタでは記録媒体140の移動手段として使用していたフィードモータ107、フィードローラ106および110の代わりに本実施形態のインクジェットプリンタでは表面精度がよいステージ1003に記録媒体140を固定し、高精度のLFリニアモータ1002を用いて記録媒体140を移動している。
【0106】
LFリニアモータ1002は定盤1008にがっちりと固定されており、ステージ1003が移動しても記録媒体140を載せるステージ表面が定盤面と常に平行になるようにしている。一方、CRリニアモータ1001は定盤1008の上にベース1004および1005を介して高精度かつ高い剛性を保って固定されており、キャリッジ1102が定盤面、すなわちステージ表面と平行に移動するように調整されている。CRリニアモータ1001およびLFリニアモータ1002にはそれぞれリニアエンコーダ1130a、1130bおよび原点センサ1006、1007が内蔵されており、各リニアモータの移動時のサーボ制御入力として利用されているとともに、CR側のリニアアエンコーダ1130aは従来と同様にインクの吐出タイミングの生成にも利用されている。なお、19は温度センサであり、1009は記録ヘッドのインク詰りを回復する回復ユニットである。温度検出部19によりリニアエンコーダ1130aのスケール1131aおよびリニアエンコーダ1130bのスケール1131bの環境温度による変化を補正可能である。
【0107】
[画像記録動作:図12]
次に、図12を参照しながら、第2の実施形態インクジェットプリンタの画像記録動作について説明する。
【0108】
図12は、第2の本実施形態のインクジェットプリンタの全体ブロック図である。機構部16は、記録ヘッド120、121、122、123を主走査方向(X1、X2方向)に移動させるためのCRリニアモータ1001、フィルムやガラス基板などの記録媒体140を搭載したステージ1003を副走査方向(Y方向)に搬送するLFリニアモータ1002、記録ヘッドのインク詰りを回復する回復ユニット1009等から構成されている。
【0109】
主制御部14は、記録ヘッド120〜123および機構部16等をはじめとする本インクジェットプリンタ全体を制御する中枢部分であり、CPUおよび各種制御プログラムなどを格納してなるROM、種々のデータなどの書き込みと読み出しなどを行う作業用RAMなどから構成されている。
【0110】
主制御部14は、機構部16に対して制御信号を出力してキャリッジ102の移動や記録媒体140の移動などの機構制御を行い、さらに、記録ヘッド駆動部12、メモリ制御部20、さらには記録位置信号発生部11とも密接に信号のやり取りをして記録ヘッド120、121、122、123の駆動を制御する。
【0111】
I/F部17は、不図示のホストコンピュータと本インクジェットプリンタとのインターフェース部分でホストコンピュータからコマンドおよび画像データ、さらには後述する補正データの受信を行う。
【0112】
メモリ制御部20は、I/F部17から入力されたコマンドを主制御部14に転送すると共に、主制御部14の制御の下で画像データをバッファメモリ15に書き込むようアドレスと書き込みタイミング信号を生成する。温度検出部19によって検出されたリニアエンコーダ1130a,リニアエンコーダ1130bのスケール1131a,スケール1131bの近傍の温度は、主制御部14に送信される。
【0113】
また補正データメモリ18は、CRリニアモータ(主走査方向)、LFリニアモータ(副走査方向)のそれぞれの各移動位置におけるインクの着弾位置ずれデータがテーブルとして記憶されており、主制御部14は、この着弾位置ずれデータを参照して主走査方向及び副走査方向の位置ずれ量を補正する制御を行うことができる。
【0114】
主制御部14は、I/F部17から入力されたコマンドを解読し、その結果により画像記録速度や画像記録の解像度などの画像記録条件を設定して、その画像記録条件によって機構部16および記録位置信号発生部11を制御して所望の条件で画像を記録する。
【0115】
一方、不図示のホストコンピュータから受信した画像データは、一時メモリであるバッファメモリ15に記憶されたあと、主制御部14から指令を受けたメモリ制御部20の制御により、記録ヘッド駆動部12に転送される。
【0116】
記録ヘッド駆動部12は、記録位置信号発生部11から出力される画像記録位置信号に同期してバッファメモリ15から転送された画像データにしたがって記録ヘッドの各ノズルを駆動して画像を記録する。
【0117】
ここで、バッファメモリ15は、記録ヘッド120、121、122、123が主走査方向に1回走査して画像を記録するために必要とされる1バンド分以上の画像データを格納し得る記憶容量を備えたメモリから構成されている。この1バンドのデータは、ノズルの並びに対応したカラム形式で格納されている。
【0118】
例えば、各記録ヘッドの副走査方向のノズル数が128ノズルで、主走査方向に1スキャンで画像記録できる最大ドット数が8kドットであるとすれば、バッファメモリ15のメモリは、128(ノズル)×8000(ドット)×4(色)=4,096,000(4MBit以上)の記憶容量を持つことになる。
【0119】
なお、I/F部17は、転送する画像データが膨大な上、描画速度のスピードアップが要求される場合には、例えば、セントロニクスインターフェース、SCSIインターフェースのほか最近ではIEEE1394などの高速のインターフェースを用いてもよい。
【0120】
[画像記録位置の制御:図2〜図6]
次に、第2実施形態のインクジェットプリンタにおける画像記録位置の制御方法について説明する。第2実施形態のインクジェットプリンタにおける画像記録位置の制御方法は、図2〜図6を用いて説明した第1実施形態のインクジェットプリンタにおける画像記録位置の制御方法と同じである。したがって、図2〜図6の説明は重複するのでその説明は省略する。
【0121】
[記録位置データの作成方法]
以上、記録ヘッド駆動部12に出力する画像記録タイミングを生成する方法について説明したが、次にRAM300に書き込む記録位置データの作成方法について説明する。
【0122】
まず、単純に記録データにより指定された解像度で画像記録する場合の画像記録位置データの作成方法を説明する。
【0123】
画像記録開始位置をLs[μm]、解像度ピッチをPr[μm]、リニアエンコーダの分解能をEr[μm]としたとき、画像記録開始位置からn番目、すなわちnカラム目の画像記録位置に対応するRAMのアドレスをAnとすると、Anは、
An=(Ls+n×Pr)/Er (5)
となり、RAM300の内容をすべて"0"クリアしたあと、上記の式に従って、全ての画像記録位置数分のnに対してAnを求め、RAM300のアドレスAnに対応するデータの所望のビットに画像記録を示す"1"を書き込めば、所望の画像記録解像度で記録位置パルスを発生させることができる。
【0124】
したがって、第2実施形態のインクジェットプリンタも、0.5μm/カウンタの高精度で記録ヘッドの位置検出ができ、かつ、(5)を用いて、受信した記録データから画像を記録する際に、その記録データの解像度に適した画像記録位置データを生成することができるので、従来行うことができなかった一台のインクジェットプリンタで300dpi系と360dpi系とのどちらの解像度の画像記録をも行うことができる。
【0125】
[キャリッジおよび記録媒体移動手段の移動誤差の補正方法]
次に、第2の実施形態のインクジェットプリンタにおいて、キャリッジと記録媒体移動手段との2つの移動誤差により、記録媒体に記録されるインクの着弾位置の位置ずれを補正して、第2の実施形態のインクジェットプリンタよりも更に高精度で画像記録する方法について、以下詳細に説明する。
【0126】
まず、インクの着弾位置の位置ずれについて説明する。
【0127】
図11の全体構成図に示すように第2実施形態のインクジェットプリンタでは高精度のリニアモータによりキャリッジおよび記録媒体を精度良く移動することができる。しかし、このような高精度リニアモータにおいてもピッチング、ヨーイング、真直度などの移動誤差要因説明がゼロというわけではない。そのため、これらの誤差要因によって記録媒体に付与したインクの着弾位置ずれが生じることになる。
【0128】
[着弾位置ずれの測定:図13]
図13はキャリッジ1102に記録ヘッドの代わりにレーザ光源を鉛直下向きに設置し、ステージ1003の表面に記録媒体として感光フィルムを置いて、CRリニアモータ1001またはLFリニアモータ1002を所定の位置に移動した後、レーザ光源をスポット発光させたときの感光フィルムに記録されたレーザスポットの位置を示したチャート図である。
【0129】
チャート図中の+印は理想位置(位置ずれ量=0)を示し、CRリニアモータ1001およびLFリニアモータ1002についてそれぞれ11点の位置についてスポット位置がプロットされている。
【0130】
図14および15は、図13のスポット位置を超高精度の位置測定器で測定して各スポットの理想位置からのずれ量をグラフにしたもので、図14はCRリニアモータが主走査方向に移動したときの主走査方向および副走査方向への各スポットの理想位置からのずれ量を表したグラフであり、図15は同様にLFリニアモータが副走査方向に移動したときの主走査方向および副走査方向への各スポットの理想位置からのずれ量を表したグラフである。
【0131】
レーザ光源から出射したレーザ光束の向きは極めて安定しているため、各スポットの理想位置からのずれ量は、リニアモータの移動誤差によって生じる着弾位置のずれ量となる。よって、横軸がCRリニアモータ1001、LFリニアモータ1002それぞれの移動位置、縦軸が各移動位置におけるインクの着弾位置のずれ量を示す。この着弾位置ずれデータはホストコンピュータからI/F部17を経由して主制御部14に伝送され補正データメモリ18にテーブルとして記憶されており、主制御部14からこれらのデータは参照できるようになっている。
【0132】
なお上記説明した測定ポイント以外の位置については、主制御部14で直線補間して着弾位置のずれ量を求め、その値にもとづいて、以下に説明する着弾位置ずれ補正が行われる。
【0133】
[キャリッジ移動誤差による主走査方向の着弾位置ずれの補正]
最初に上記の測定データに基づいてキャリッジ移動誤差による主走査方向の着弾位置ずれ補正方法について説明する。
【0134】
図14において、キャリッジ1102の原点からの移動量dのときの主走査方向のずれ量をMx(d)とすると、画像記録開始位置からn番目の画像記録位置におけるずれ量は、Mx(Ls+n×Pr)であることから、Anは、
An=((Ls+n×Pr)−Mx(Ls+n×Pr))/Er (6)
となり、RAM300の内容をすべて0クリアしたあと、上記の式に従って、全ての画像記録位置数分のnに対してAnを求め、RAM300のアドレスAnに対応するデータの所望のビットに画像記録を示す1を書き込めば、キャリッジ移動誤差による主走査方向の着弾位置ずれを補正して本来に位置で記録位置パルスを発生させることができる。
【0135】
[記録媒体移動誤差による主走査方向の着弾位置ずれの補正]
従来のインクジェットプリンタと同様に第2の実施形態のインクジェットプリンタはシリアル方式のプリンタであるため、1スキャン記録と記録媒体の1バンド幅移動を交互に行って画像に記録動作を行っている。よって、記録媒体を移動したことによって着弾位置ずれが発生した場合にも補正する必要がある。
【0136】
図15において、記録媒体140の原点からの移動量fのときの主走査方向のずれ量を表すSx(f)は、記録開始スキャン位置をYs、副走査方向のスキャン幅をYbとすると、記録開始スキャンからm番目のスキャンのずれ量は、
Sx(Ys+m×Yb)
となる。このスキャン幅Ybは、例えば、1スキャンで記録する移動方向の記録幅(例えば、記録ヘッドのノズル幅と等しい)であり、説明を簡単にするために、各スキャンの記録幅は同じであるとしている。
【0137】
このように、記録媒体の搬送位置に応じたずれ量が算出され、このずれ量を用いれば、主走査方向のずれを補正することができる。
【0138】
例えばこのずれ量の情報は、補正データメモリ18に保存しておけば、容易に位置ずれの補正を行うことができる。
【0139】
よって、これに前記キャリッジ移動誤差による主走査方向の着弾位置ずれの補正を加えて、mスキャンのnカラム目の記録位置に対応するRAMのアドレスをA(m、n)とすると、
A(m、n)=((Ls+n×Pr)−Mx(Ls+n×Pr)−Sx(Ys+m×Yb))/Er (7)
となる。
【0140】
よって、各スキャンの画像記録を開始する前にRAM300の内容をすべて0クリアしたあと、上記の式に従って、全ての画像記録位置についてA(m、n)を求め、RAM300のアドレスA(m、n)に対応するデータの所望のビットに画像記録を示す"1"を書き込めばキャリッジと記録媒体の移動誤差による主走査方向の着弾位置ずれを補正することができる。
【0141】
ただし、この場合RAM300の書き込みに時間を要してしまい、記録速度に間に合わせるために、例えばRAM300を2系統設ける。この構成により、一方RAM300に対して読み出し動作を行っている間に、もう一方のRAMに次のスキャンの記録位置データを書き込むことによって解消することができる。なお、以上の処理は、主制御部14が補正データメモリ18の内容を参照しながら行なっている。
【0142】
[キャリッジ移動誤差による副走査方向の着弾位置ずれの補正]
次に、キャリッジ移動誤差による副走査方向の着弾位置ずれの補正方法について説明する。
【0143】
図14に示されるようにキャリッジが移動しながら画像記録を行う過程で副走査方向についても着弾位置ずれが生じる。よって、キャリッジ位置における副走査方向の着弾位置ずれにしたがって記録媒体を微少移動すれば補正することが可能である。本実施形態のインクジェットプリンタでは、主制御部14に位置検出部10からキャリッジの位置情報を読み出して、補正データメモリ18からその位置での着弾位置ずれデータを読み出してLFリニアエンコーダを制御する専用のコントローラを設けているため、自動的にこの補正を行うことができる。なお、上記補正のために記録媒体を移動させる距離はごく僅かであるため、この移動によって新たに生じる誤差は無視できる。
【0144】
[記録媒体移動誤差による副走査方向の着弾位置ずれの補正]
次に、記録媒体移動誤差による副走査方向の着弾位置ずれの補正方法について説明する。
【0145】
図15に示されるように記録媒体を副走査方向に所望量移動した場合でも、実際には副走査方向に微小量ずれてしまう。そこで、その微小量を予め加味して記録媒体を移動するようにすれば、所望の移動が実現できる。すなわち、記録媒体140を原点からのfの場所に移動するとき、その場所でのLFリニアモータ1002による副走査方向のずれ量をSy(f)ととすると
LFリニアモータ1002への指令値Fは
F=f−Sy(f)
となり、LFリニアモータ1002に移動位置Fを指令すると、所望の位置fに移動することができる。
【0146】
[エンコーダスケールの熱膨張よる誤差補正]
第2の実施形態のインクジェットプリンタは非常に高い着弾位置精度が要求されているため、一定温度に保たれている場所に設置することすることする必須であるが、微小の温度変化の場合、機構部の熱膨張を無視して、エンコーダスケールの熱膨張よる誤差を補正することもできるようになっている。
【0147】
エンコーダスケール1130の近傍には温度センサ19が配置されており、その温度データは主制御部14で読み込めるようになっている。よって、主制御部14は、その温度値に基づいて記録位置データを補正すれば、エンコーダスケールの熱膨張による誤差補正を行うことができる。
【0148】
温度検出部19の示す温度値をT[℃]、エンコーダの校正データを測定した温度、すなわち基準温度をTo[℃]、エンコーダスケール1130の熱膨張係数をkとすると、(5)式を熱膨張による誤差補正したAnは、
An=((Ls+n×Pr)×(1+k×(T−To)))/Er (8)
となる。
【0149】
よって、(7)式の補正式に(8)式の補正をさらに加えると、
A(m、n)=(((Ls+n×Pr)−Mx(Ls+n×Pr)−Sx(Ys+m×Yb))×(1+k×(T−To)))/Er (9)
熱膨張が無い場合に説明したのと同様の方法で、全ての画像記録位置数分のnに対してAnを求め、RAM300のアドレスAnに対応するデータの所望のビットに画像記録を示す1を書き込めば、エンコーダスケール1130の熱膨張による誤差補正がなされ、正しい位置に画像記録されることになる。
【0150】
なお、実施形態ではリニアエンコーダ1130の分解能は0.5μmであるので、画像記録位置の設定は、最大±0.5μmの誤差を生じるが、最大±0.5μmの誤差は、例えば、2400dpiの解像度ピッチ10.6μmの±5%以下(すなわち、±0.53μm以下)であるため問題とはならない。また将来、解像度が向上する場合には、例えば、0.1μm分解能のリニアエンコーダを使用することにより、誤差を許容範囲(例えば、0.1μm程度)に収めることが可能である。
【0151】
また、上記説明した本実施形態では、複数の記録ヘッドを有するカラーインクジェットプリンタを例に取り説明したが、本発明はカラーインクジェットプリンタに限らず、一般に市販されるインクジェットプリンタや他の画像記録方式をとる画像記録装置、例えば熱転写方式を用いた画像記録装置あるいは一般のプリンタにも適用可能であり、本発明は特に上記各実施形態に限定されるものではない。
【0152】
[画像記録の処理:図16]
図16は、上記説明した第2の実施形態のインクジェットプリンタによる画像記録の処理の一例として、走査方向の往路のみの記録(片方向記録)を行う場合の処理を示したものであり、受信した記録データから画像を作成する際に、受信した記録データの解像度を検出し、その解像度に適した画像記録を行う処理を示すとともに、さらに高精度で画像記録を行うために、環境温度の変化に伴う画像記録位置の読み取り誤差を補正する処理や、記録ヘッドの各位置、記録媒体の各位置における位置ずれを補正する処理を示している。なお、図16の画像記録の処理は一例であり、図16を応用することにより、走査方向の往路と復路で記録を行う(双方向記録)場合にも適応できる。
【0153】
図16の処理は、主制御部14のROMに格納された制御プログラムに基づいて主制御部14がRAMを作業領域として用い、各部を制御しながら実行するものである。以下、具体的に説明する。
【0154】
まず、ステップS1501において、記録データを受信すると、記録データをメモリに格納すると共に記録データから記録する画像の解像度を検出する。
【0155】
次に、ステップS1502において、検出された解像度に適した画像記録を行えるように、検出された解像度に応じた画像記録位置データとして画像記録開始位置からn番目の画像記録位置Anを生成する。
【0156】
次に、ステップS1503において、画像記録位置データに各位置における補正を行うか判断する。補正をするならば(YES)、ステップS1504に進み位置補正を行う。そしてステップS1505に進む。位置補正をしない場合(NO)には、何もしないでステップS1505に進む。
【0157】
次に、ステップS1505において、記録位置データについて環境温度による補正をする場合(YES)には、ステップS1506に進み環境温度による補正を行う。その後ステップS1507に進む。環境温度による補正をしない場合(NO)には、ステップS1507に進む。
【0158】
次に、ステップS1507では、記録ヘッドの走査方向の往路、復路別にRAMのアドレスAnに"1"を書き込む。(ここで、"1"は記録位置を示し、"0"は記録位置でないことを示す。)
次に、ステップS1508でキャリッジを駆動開始すると、ステップS1509で記録位置の位置を検出してカウント値を出力し、次にステップS1510でカウント値に対応するRAMのアドレスにアクセスし画像記録位置であれば記録位置パルスを発生し画像記録を行ってからステップS1511に進む。
【0159】
次にステップS1511では1バンドの画像記録が終了していない場合にはステップS1509に戻り上記説明した処理を繰り返し行い、1バンドの画像記録が終了した場合にはステップS1512に進みキャリッジをホームポジションに戻したから一連の作業を終了する。
【0160】
以上説明したように本実施形態のインクジェットプリンタは高分解能のリニアエンコーダを用いて記録ヘッドの位置を従来のインクジェットプリンタに比べて数十倍の精度で検出することができ、さらに、受信した記録データから画像を記録する際に、受信した記録データの解像度に適した画像記録位置データを生成して画像記録することができるので、一台で300dpi系および360dpi系のどちらの解像度の画像記録を行うことができる。また、メモリの容量やメモリアクセスが間に合えば他の解像度でも画像記録をおこなうことができる。また、記録位置情報として"1"を記録位置、"0"は非記録位置として制御しているが、他のデータを用いてもかまわない。"0"を記録位置、"1"は非記録位置として制御しても構わない。
【0161】
またさらに、本実施形態のインクジェットプリンタは、記録ヘッドの移動方向に沿って配置されたリニアエンコーダの位置パルス信号をカウントして記録ヘッドの主走査方向における位置を検出し、その位置データをアドレスとするメモリに主走査方向における画像記録位置情報を書き込む際に、予め測定しておいた主走査位置における着弾位置ずれ量にしたがって画像記録位置情報に補正を加えて書き込むことによって、インクジェットプリンタのキャリッジ移動手段自体が持っている着弾位置誤差を最小限に抑えることができる。
【0162】
さらに、スキャン毎に画像記録位置情報を書き込む際にそのスキャンにおけるLFリニアモータにより生じる主走査方向の着弾位置ずれ量の補正を加えることで、インクジェットプリンタのLFリニアモータによる主走査方向の着弾位置ずれを抑えることができる。
【0163】
一方、副走査方向の着弾位置ずれに対しても、キャリッジ移動手段による副走査方向の着弾位置ずれ量をLFリニアモータを逐次移動して補正することで解消できる。
【0164】
さらにLFリニアモータの副走査方向に移動誤差についても予め副走査方向の移動誤差を予め加味してLFリニアモータを移動することによって、記録媒体のフィードを正確に行うことができる。
【0165】
また、往路方向と復路方向で画像記録位置情報を独立に設定することができるので、往路方向と復路方向で生じるレジずれを補正することが可能である。
【0166】
また、記録ヘッド毎に独立に画像記録位置情報を設定することで複数ヘッド間のレジずれを補正することも可能である。
【0167】
また、主走査方向の画像記録解像度により画像記録位置情報を書き換えることにより、任意の解像度の画像記録も可能である。
【0168】
また、環境温度により画像記録位置情報を補正して書き込むことによりリニアエンコーダの熱膨張による着弾位置ずれを補正することも可能である。
【0169】
【他の実施形態】
以上の実施形態のインクジェットプリンタは、特にインクジェット記録方式の中でも、インク吐出を行わせるために利用されるエネルギーとして熱エネルギーを発生する手段(例えば電気熱変換体やレーザ光等)を備え、前記熱エネルギーによりインクの状態変化を生起させる方式を用いることにより記録の高密度化、高精細化が達成できる。
【0170】
その代表的な構成や原理については、例えば、米国特許第4723129号明細書、同第4740796号明細書に開示されている基本的な原理を用いて行うものが好ましい。この方式は、いわゆるオンデマンド型、コンティニュアス型のいずれにも適用可能であるが、特に、オンデマンド型の場合には、液体(インク)が保持されているシートや液路に対応して配置されている電気熱変換体に、記録情報に対応していて核沸騰を越える急速な温度上昇を与える少なくとも1つの駆動信号を印加することによって、電気熱変換体に熱エネルギーを発生せしめ、記録ヘッドの熱作用面に膜沸騰を生じさせて、結果的にこの駆動信号に1対1で対応した液体(インク)内の気泡を形成できるので有効である。
【0171】
この気泡の成長、収縮により吐出用開口を介して液体(インク)を吐出させて、少なくとも1つの滴を形成する。この駆動信号をパルス形状とすると、即時適切に気泡の成長収縮が行われるので、特に応答性に優れた液体(インク)の吐出が達成でき、より好ましい。
【0172】
さらに、記録装置が記録できる最大記録媒体の幅に対応した長さを有するフルラインタイプの記録ヘッドとしては、上述した明細書に開示されているような複数記録ヘッドの組み合わせによってその長さを満たす構成や、一体的に形成された1個の記録ヘッドとしての構成のいずれでもよい。
【0173】
加えて、上記の実施形態で説明した記録ヘッド自体に一体的にインクタンクが設けられたカートリッジタイプの記録ヘッドのみならず、装置本体に装着されることで、装置本体との電気的な接続や装置本体からのインクの供給が可能になる交換自在のチップタイプの記録ヘッドを用いてもよい。
【0174】
また、以上説明した記録装置の構成に、記録ヘッドに対する回復手段、予備的な手段等を付加することは記録動作を一層安定にできるので好ましいものである。これらを具体的に挙げれば、記録ヘッドに対してのキャッピング手段、クリーニング手段、加圧あるいは吸引手段、電気熱変換体あるいはこれとは別の加熱素子あるいはこれらの組み合わせによる予備加熱手段などがある。また、記録とは別の吐出を行う予備吐出モードを備えることも安定した記録を行うために有効である。
【0175】
さらに、記録装置の記録モードとしては黒色等の主流色のみの記録モードだけではなく、記録ヘッドを一体的に構成するか複数個の組み合わせによってでも良いが、異なる色の複色カラー、または混色によるフルカラーの少なくとも1つを備えた装置とすることもできる。
【0176】
以上説明した実施の形態においては、インクが液体であることを前提として説明しているが、室温やそれ以下で固化するインクであっても、室温で軟化もしくは液化するものを用いても良く、あるいはインクジェット方式ではインク自体を30°C以上70°C以下の範囲内で温度調整を行ってインクの粘性を安定吐出範囲にあるように温度制御するものが一般的であるから、使用記録信号付与時にインクが液状をなすものであればよい。
【0177】
加えて、積極的に熱エネルギーによる昇温をインクの固形状態から液体状態への状態変化のエネルギーとして使用せしめることで積極的に防止するため、またはインクの蒸発を防止するため、放置状態で固化し加熱によって液化するインクを用いても良い。いずれにしても熱エネルギーの記録信号に応じた付与によってインクが液化し、液状インクが吐出されるものや、記録媒体に到達する時点では既に固化し始めるもの等のような、熱エネルギーの付与によって初めて液化する性質のインクを使用する場合も本発明は適用可能である。
【0178】
また、本発明の目的は、前述した実施形態の機能を実現するソフトウェアのプログラムコードを記録した記憶媒体を、システムあるいは装置に供給し、そのシステムあるいは装置のコンピュータ(またはCPUやMPU)が記憶媒体に格納されたプログラムコードを読出し実行することによっても、達成されることは言うまでもない。この場合、記憶媒体から読出されたプログラムコード自体が前述した実施形態の機能を実現することになり、そのプログラムコードを記憶した記憶媒体は本発明を構成することになる。
【0179】
プログラムコードを供給するための記憶媒体としては、例えば、フロッピディスク、ハードディスク、光ディスク、光磁気ディスク、CD−ROM、CD−R、磁気テープ、不揮発性のメモリカード、ROMなどを用いることができる。
【0180】
また、コンピュータが読出したプログラムコードを実行することにより、前述した実施形態の機能が実現されるだけでなく、そのプログラムコードの指示に基づき、コンピュータ上で稼働しているOS(オペレーティングシステム)などが実際の処理の一部または全部を行い、その処理によって前述した実施形態の機能が実現される場合も含まれることは言うまでもない。
【0181】
さらに、記憶媒体から読出されたプログラムコードが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書込まれた後、そのプログラムコードの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPUなどが実際の処理の一部または全部を行い、その処理によって前述した実施形態の機能が実現される場合も含まれることは言うまでもない。
【0182】
本発明を上記記憶媒体に適用する場合、その記憶媒体には、先に説明した図10および図16などに示した処理を実現するプログラムが格納されることになる。
【0183】
以上説明したように本実施形態のインクジェットプリンタは、記録ヘッドの移動方向に沿って配置されたリニアエンコーダの位置パルス信号をカウントして記録ヘッドの主走査方向における位置を検出する位置検出し、その位置データを予め主走査方向における画像記録位置情報が書き込まれているメモリのアドレスとすることによって、予め書き込まれている画像記録位置情報に従って画像記録動作を行うようにすることによって任意の画像記録条件で画像記録を行うことができる。
【0184】
また、主走査方向の画像記録方向により、往路方向と復路方向で画像記録位置情報を独立に設定することができるので、往路方向と復路方向で生じるレジずれを補正することが可能である。
【0185】
また、記録ヘッド毎に独立に画像記録位置情報を設定することで複数ヘッド間のレジずれを補正することも可能である。
【0186】
また、主走査方向の画像記録解像度により画像記録位置情報を書き換えることにより、任意の解像度の画像記録も可能である。
【0187】
また、環境温度により画像記録位置情報を補正して書き込むことによりリニアエンコーダの熱膨張による着弾位置ずれを補正することも可能である。
【0188】
また、リニアエンコーダの校正データに基づいて画像記録位置情報を補正して書き込むことによりリニアエンコーダの製造誤差による着弾位置ずれを補正することも可能である。
【0189】
また、キャリッジ移動手段および記録媒体移動手段が持っているピッチング、ヨーイングなどの機械的誤差要因による着弾位置ずれを最小限に抑えて画像記録ができる。
【0190】
【発明の効果】
以上説明したように、本発明によれば、一台で300dpi系、360dpi系など様々な解像度の画像記録ができる画像記録装置およびその制御方法を提供できる。
【図面の簡単な説明】
【図1】本発明の第1の実施形態のインクジェットプリンタの制御構成を示すブロック図である。
【図2A】本実施形態のリニアエンコーダの主走査方向の往路における出力信号を示す図である。
【図2B】本実施形態のリニアエンコーダの主走査方向の復路における出力信号を示す図である。
【図3】本実施形態の記録ヘッドの位置検出部の回路の一例を示す図である。
【図4】本実施形態の位置検出部のタイミングチャートの一例である。
【図5】本実施形態の位置発生部のブロック図である。
【図6】本実施形態の位置発生部の動作を説明する図である。
【図7】本発明の第1の実施形態のリニアエンコーダのキャリッジの主走査方向の移動量xに対するずれ量S(x)の一例を示す図である。
【図8】本発明の第1の実施形態のインクジェットプリンタの概略図である。
【図9】従来のインクジェットプリンタの概略図である。
【図10】本発明の第1の実施形態のインクジェットプリンタによる画像記録処理を説明する図である。
【図11】本発明の第2の実施形態のインクジェットプリンタのブロック図である。
【図12】本発明の第2の実施形態のインクジェットプリンタの制御構成を示すブロック図である。
【図13】本発明の第2の実施形態のインクジェットプリンタにおける主走査方向、副走査方向における着弾位置ずれを示す測定チャート図である。
【図14】CRリニアモータを主走査方向に移動したときの主走査方向および副走査方向へのスポットのずれ量(着弾位置ずれ量)を表した図である。
【図15】LFリニアモータを副走査方向に移動したときの主走査方向および副走査方向へのスポットのずれ量(着弾位置ずれ量)を表した図である。
【図16】本発明の第2の実施形態のインクジェットプリンタによる画像記録処理を説明する図である。
【符号の説明】
10 記録ヘッド位置検出部
11 記録位置信号発生部
12 記録ヘッド制御部
120〜123 記録ヘッド駆動部
13 記録ヘッド
14 主制御部
15 バッファメモリ
16 機構部
17 I/F部
19 温度検出部
20 メモリ制御部
100、101 ローラ
102 キャリッジ
103、107 モータ
106 プラテン
108 原点センサー
110 フィードローラ
111 媒体検知センサー
130 リニアエンコーダ
140 記録媒体
201、202、204、206 ラッチ
203、204、207、208 ゲート
210 アップダウンカウンタ
300 RAM
301 セレクタ
1001 CRリニアモータ
1002 LFリニアモータ
1003 ステージ
1004 ベース
1005 ベース
1006 原点センサ
1007 原点センサ
1008 定盤
1009 回復ユニット
1130 リニアエンコーダ
1130a リニアエンコーダ
1130b リニアエンコーダ
1131 スケール
1131a スケール
1131b スケール
1132 センサ部
Claims (7)
- 記録ヘッドを搭載したキャリッジを記録媒体を搬送する搬送方向と直交する方向に走査させ、入力される記録データに基づいて記録を行う画像記録装置であって、
前記記録データを格納するバッファメモリと、
前記記録ヘッドを駆動する記録ヘッド駆動手段と、
前記記録媒体に対して走査する記録ヘッドの走査方向の位置を検出して、前記記録データの前記走査方向の解像度より高い解像度の位置信号を生成する位置検出手段と、
記録位置を示す記録位置データと非記録位置を示す非記録位置データとを前記記録データの解像度に対応させて生成し、生成した前記記録位置データと前記非記録位置データとを、前記記録データの解像度と前記位置信号の解像度と前記記録ヘッドの前記走査方向の記録範囲とに基づき、記憶手段の予め定められた数のアドレスに含まれるアドレス領域に予め書き込む記録位置制御手段と、
前記記録を行うときに、前記位置検出手段により生成された前記位置信号の入力に従って前記記憶手段の前記アドレス領域に含まれる予め定められた数のアドレスを順にアクセスし、前記アドレス領域から前記記録位置データを読み出すたびに、前記記録ヘッドを駆動させる記録位置信号を出力する記録位置信号発生手段と、
前記記録位置信号に同期して前記バッファメモリから前記記録ヘッド駆動手段へ前記画像データを転送する転送手段と、
を有することを特徴とする画像記録装置。 - 前記記録位置制御手段は、前記記録ヘッドの走査方向の往路と復路とで前記記録ヘッドを駆動させる位置が異なるように前記記録位置データと前記非記録位置データを前記アドレス領域に書き込むことを特徴とする請求項1に記載の画像記録装置。
- 前記位置検出手段の周辺の環境温度を検出する温度検出手段を更に有し、前記記録位置制御手段は、前記検出された環境温度に応じて前記記憶手段に書き込む前記記録位置データと前記非記録位置データのアドレスを補正することを特徴とする請求項1または請求項2に記載の画像記録装置。
- 前記走査方向の各位置における位置ずれ情報に基づいて前記記録位置データと前記非記録位置データを前記記憶手段に書き込むことを特徴とする請求項1乃至請求項3に記載の画像記録装置。
- 前記記録ヘッドを複数有し、前記複数の記録ヘッドごとに前記記録位置データと前記非記録位置データとが独立して前記記憶手段の予め決められたアドレス領域に記憶されていることを特徴とする請求項1乃至請求項4のいずれか1項に記載の画像記録装置。
- 前記記録媒体の搬送方向の移動量に応じた主走査方向の位置ずれ情報を保持する第2記憶手段を更に有し、
前記第2記憶手段に保持されている前記位置ずれ情報に基づいて前記記録位置データと前記非記録位置データとを前記記憶手段に書き込むことを特徴とする請求項1乃至請求項5に記載のいずれか1項に記載の画像記録装置。 - 記録ヘッドを搭載したキャリッジを記録媒体を搬送する搬送方向と直交する方向に走査させ、入力される記録データに基づいて記録を行う画像記録装置の制御方法であって、
前記画像記録装置は、前記記録データを格納するバッファメモリと、前記記録ヘッドを駆動する記録ヘッド駆動手段とを有し、
前記記録媒体に対して走査する記録ヘッドの走査方向の位置を検出して、前記記録データの前記走査方向の解像度より高い解像度の位置信号を生成する位置検出工程と、
記録位置を示す記録位置データと非記録位置を示す非記録位置データとを前記記録データの解像度に対応させて生成し、生成した前記記録位置データと前記非記録位置データとを、前記記録データの解像度と前記位置信号の解像度と前記記録ヘッドの前記走査方向の記録範囲とに基づき、記憶手段の予め定められた数のアドレスに含まれるアドレス領域に予め書き込む記録位置制御工程と、
前記記録を行うときに、前記位置検出工程により生成された前記位置信号の入力に従って前記記憶手段の前記アドレス領域に含まれる予め定められた数のアドレスを順にアクセスし、前記アドレス領域から前記記録位置データを読み出すたびに、前記記録ヘッドを駆動させる記録位置信号を出力する記録位置信号発生工程と、
前記記録位置信号に同期して前記バッファメモリから前記記録ヘッド駆動手段へ前記画像データを転送する転送工程と、
を有することを特徴とする画像記録装置の制御方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003135796A JP4508549B2 (ja) | 2002-06-19 | 2003-05-14 | 画像記録装置及びその制御方法 |
| EP03013807.7A EP1375165B1 (en) | 2002-06-19 | 2003-06-18 | Image printer apparatus and control method therefor |
| US10/463,325 US7097266B2 (en) | 2002-06-19 | 2003-06-18 | Image printing apparatus and control method therefor |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002178827 | 2002-06-19 | ||
| JP2003135796A JP4508549B2 (ja) | 2002-06-19 | 2003-05-14 | 画像記録装置及びその制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2004074771A JP2004074771A (ja) | 2004-03-11 |
| JP2004074771A5 JP2004074771A5 (ja) | 2006-06-29 |
| JP4508549B2 true JP4508549B2 (ja) | 2010-07-21 |
Family
ID=29718409
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003135796A Expired - Fee Related JP4508549B2 (ja) | 2002-06-19 | 2003-05-14 | 画像記録装置及びその制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7097266B2 (ja) |
| EP (1) | EP1375165B1 (ja) |
| JP (1) | JP4508549B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8388104B2 (en) * | 2007-07-25 | 2013-03-05 | Hewlett-Packard Development Company, L.P. | Determining encoder strip expansion |
| JP2010099570A (ja) * | 2008-10-22 | 2010-05-06 | Seiko Epson Corp | 液滴吐出装置 |
| JP5720136B2 (ja) * | 2010-08-03 | 2015-05-20 | 株式会社リコー | 画像形成装置及びプログラム |
| JP6876470B2 (ja) * | 2017-03-07 | 2021-05-26 | 東京エレクトロン株式会社 | ワーク加工装置、ワーク加工方法、プログラム及びコンピュータ記憶媒体 |
| JP6994949B2 (ja) * | 2018-01-05 | 2022-01-14 | 株式会社東芝 | 画像形成装置及び位置補正方法 |
| JP7103273B2 (ja) * | 2019-02-28 | 2022-07-20 | カシオ計算機株式会社 | 位置検出装置、印刷装置及び位置検出方法 |
| JP6747568B1 (ja) * | 2019-11-18 | 2020-08-26 | セイコーエプソン株式会社 | 液体吐出装置および液体吐出ヘッドユニット |
| JP6974816B1 (ja) * | 2021-08-05 | 2021-12-01 | 株式会社トライテック | 記録装置及び記録データ処理方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6151353A (ja) * | 1984-08-21 | 1986-03-13 | Brother Ind Ltd | ドツトマトリツクス型シリアルプリンタ |
| JPS61284455A (ja) * | 1985-06-11 | 1986-12-15 | Seiko Epson Corp | 印刷装置 |
| JPH06115170A (ja) * | 1992-10-07 | 1994-04-26 | Canon Inc | 記録装置 |
| JPH0939300A (ja) * | 1995-07-26 | 1997-02-10 | Canon Inc | 記録制御方法及びその方法を用いた記録装置 |
| JP2000141803A (ja) * | 1998-11-06 | 2000-05-23 | Fine Technol Kk | プリンタの駆動制御装置 |
| JP2000168151A (ja) * | 1998-12-02 | 2000-06-20 | Canon Inc | 記録装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA1127227A (en) * | 1977-10-03 | 1982-07-06 | Ichiro Endo | Liquid jet recording process and apparatus therefor |
| US5117374A (en) * | 1989-10-10 | 1992-05-26 | Tektronix, Inc. | Reciprocating-element position encoder |
| EP0533486B1 (en) * | 1991-09-19 | 1997-08-06 | Canon Kabushiki Kaisha | Serial recording system capable of varying resolution |
| DE69412691T2 (de) * | 1993-04-30 | 1999-01-14 | Hewlett Packard Co | Abgleichsystem für Mehrfach-Tintenstrahldruckpatronen |
| US5563591A (en) * | 1994-10-14 | 1996-10-08 | Xerox Corporation | Programmable encoder using an addressable display |
| JPH09189574A (ja) * | 1996-01-10 | 1997-07-22 | Canon Inc | 光学式リニアエンコーダ、及びこれを用いた電子装置、記録装置 |
| KR0161821B1 (ko) * | 1996-06-20 | 1999-03-30 | 김광호 | 시리얼 프린터에서 양방향 인자 위치 자동 조절 장치 및 방법 |
| US5941649A (en) * | 1997-10-07 | 1999-08-24 | Encoder Science Technologies Llc | Method for fabricating a registration guide for a wide-format printer or plotter |
| JP3501654B2 (ja) * | 1998-07-16 | 2004-03-02 | キヤノン株式会社 | 記録装置 |
| JP3745168B2 (ja) * | 1998-07-21 | 2006-02-15 | キヤノン株式会社 | 記録装置およびレジずれ検出方法 |
| JP2002029113A (ja) * | 2000-07-17 | 2002-01-29 | Mimaki Engineering Co Ltd | インクジェット記録装置 |
| US6318839B1 (en) * | 2000-10-16 | 2001-11-20 | Hewlett-Packard Company | Apparatus and method of compensating for print engine and encoder expansion or contraction in a printing device |
| EP1211073A1 (en) * | 2000-11-29 | 2002-06-05 | Océ-Technologies B.V. | Ink jet printer and method controlling the same |
| GB2379411A (en) * | 2001-09-10 | 2003-03-12 | Seiko Epson Corp | Inkjet deposition apparatus |
-
2003
- 2003-05-14 JP JP2003135796A patent/JP4508549B2/ja not_active Expired - Fee Related
- 2003-06-18 EP EP03013807.7A patent/EP1375165B1/en not_active Expired - Lifetime
- 2003-06-18 US US10/463,325 patent/US7097266B2/en not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6151353A (ja) * | 1984-08-21 | 1986-03-13 | Brother Ind Ltd | ドツトマトリツクス型シリアルプリンタ |
| JPS61284455A (ja) * | 1985-06-11 | 1986-12-15 | Seiko Epson Corp | 印刷装置 |
| JPH06115170A (ja) * | 1992-10-07 | 1994-04-26 | Canon Inc | 記録装置 |
| JPH0939300A (ja) * | 1995-07-26 | 1997-02-10 | Canon Inc | 記録制御方法及びその方法を用いた記録装置 |
| JP2000141803A (ja) * | 1998-11-06 | 2000-05-23 | Fine Technol Kk | プリンタの駆動制御装置 |
| JP2000168151A (ja) * | 1998-12-02 | 2000-06-20 | Canon Inc | 記録装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1375165A2 (en) | 2004-01-02 |
| EP1375165B1 (en) | 2013-08-14 |
| US20030234827A1 (en) | 2003-12-25 |
| US7097266B2 (en) | 2006-08-29 |
| EP1375165A3 (en) | 2007-02-21 |
| JP2004074771A (ja) | 2004-03-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6698866B2 (en) | Fluid ejection device using multiple grip pattern data | |
| JP6238545B2 (ja) | 記録装置及びレジストレーション調整の方法 | |
| JP5165127B2 (ja) | インクジェット記録装置及びインクジェット記録制御方法 | |
| JPH09314825A (ja) | 微小帯状模様を補償するプリント方法 | |
| JP2010280205A (ja) | 記録装置および記録位置調整方法 | |
| JP4508549B2 (ja) | 画像記録装置及びその制御方法 | |
| JP2002200746A (ja) | インクジェットプリンター及びその制御方法 | |
| JP2007276264A (ja) | インクジェット記録装置およびその制御方法 | |
| JP2010000665A (ja) | 記録装置および記録位置調整方法 | |
| JP2007168267A (ja) | インクジェット印画装置 | |
| JP3174229B2 (ja) | プリンタ装置 | |
| JP3330342B2 (ja) | ドットプリンタおよびドットプリンタの制御方法 | |
| JP2009039958A (ja) | 記録装置 | |
| JP2007118595A (ja) | 記録装置 | |
| US7467843B2 (en) | Methods for determining unidirectional print direction for improved print quality | |
| JP2009061755A (ja) | インクジェット記録装置及びインクジェット記録装置の制御方法 | |
| JP2004009476A (ja) | インクジェット記録装置とその制御方法 | |
| JP4380106B2 (ja) | 位置ずれ補正装置 | |
| JP2000168151A (ja) | 記録装置 | |
| JP2005246669A (ja) | 着弾位置測定方法および装置 | |
| JP4965911B2 (ja) | インクジェット記録装置及びインクジェット記録制御方法 | |
| JP2003175650A (ja) | 画像形成装置 | |
| JP2010017920A (ja) | 画像形成装置 | |
| JP2006315322A (ja) | 記録装置 | |
| JP3174227B2 (ja) | 記録装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060512 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060512 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090622 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090821 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100119 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100423 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100427 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130514 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140514 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |