JP4396071B2 - 車両用前照灯光軸方向自動調整装置 - Google Patents
車両用前照灯光軸方向自動調整装置 Download PDFInfo
- Publication number
- JP4396071B2 JP4396071B2 JP2001263077A JP2001263077A JP4396071B2 JP 4396071 B2 JP4396071 B2 JP 4396071B2 JP 2001263077 A JP2001263077 A JP 2001263077A JP 2001263077 A JP2001263077 A JP 2001263077A JP 4396071 B2 JP4396071 B2 JP 4396071B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- arrival point
- steering angle
- optical axis
- vehicle speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
- B60Q1/18—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights being additional front lights
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
- B60Q1/06—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle
- B60Q1/08—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle automatically
- B60Q1/12—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle automatically due to steering position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/11—Linear movements of the vehicle
- B60Q2300/112—Vehicle speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/12—Steering parameters
- B60Q2300/122—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/12—Steering parameters
- B60Q2300/128—Steering dead zone
Description
【発明の属する技術分野】
本発明は、車両に配設される前照灯による照射の光軸方向を自動的に調整する車両用前照灯光軸方向自動調整装置に関するものである。
【0002】
【従来の技術】
従来、車両用前照灯光軸方向自動調整装置に関連する先行技術文献としては、特許第2950897号公報にて開示されたものが知られている。このものでは、車速を考慮した車両のステアリングホイールの操舵角(ステアリング舵角)に連動して前照灯(車両用ランプ)の光軸方向を左右方向へ可変制御する技術が示されている。そして、ステアリングホイールの操舵角の中立点近傍における遊び角や細かな操作に連動した前照灯の光軸方向の左右方向への振れを防止するため、操舵角の中立点近傍に不感帯を設け、この不感帯の幅を車速に応じて変化させることで、運転者の要求に合致した前照灯のスイブル(Swivel:旋回)制御が実施されるとしている。
【0003】
【発明が解決しようとする課題】
ところで、前述のものでは、車速とステアリングホイールの操舵角とに基づき前照灯の光軸方向を制御しているが、実際に車両が曲路を旋回するときの前照灯の光軸方向と運転者が明るい視界を得たいとする視線(アイポイント)方向とにずれが生じることがあった。
【0004】
そこで、この発明はかかる不具合を解決するためになされたもので、車速とステアリングホイールの操舵角に応じ、前照灯の光軸方向を運転者の意図する視線方向に適切に調整可能な車両用前照灯光軸方向自動調整装置の提供を課題としている。
【0005】
【課題を解決するための手段】
請求項1の車両用前照灯光軸方向自動調整装置によれば、車速検出手段で検出された車速(車両の速度)と操舵角検出手段で検出された車両のステアリングホイールの操舵角とに基づき到達点演算手段にて車両の所定時間経過後の到達点が算出され、この到達点が車両の前照灯による照射範囲内となるよう光軸方向調整手段によって前照灯の光軸方向が調整される。つまり、車両の前照灯の光軸方向が車速と操舵角とに基づく所定時間経過後の到達点に向けられる。これにより、車両が曲路を旋回するときの前照灯の光軸方向が運転者の意図する視線方向に適切に調整され、運転者に違和感を与えることが抑止される。
また、前記到達点演算手段では、到達点に対して操舵角に応じた、即ち、このときの到達点が基準とする操舵角のときの到達点に一致するよう所定の制御係数が乗算され補正される。これにより、車両が曲路を旋回するときの前照灯の光軸方向が運転者の意図する視線方向に適切に補正され調整される。
そして、前記到達点演算手段では、到達点に対して車速の変化に応じた、即ち、このときの到達点が基準とする車速の変化のときの到達点に一致するよう所定の制御係数が乗算され補正される。これにより、車両が曲路を旋回するときの前照灯の光軸方向が運転者の意図する視線方向に適切に補正され調整される。
【0006】
請求項2の車両用前照灯光軸方向自動調整装置における到達点演算手段では、到達点に対して車速に応じた、即ち、このときの到達点が基準とする車速のときの到達点に一致するよう所定の制御係数が乗算され補正される。これにより、車両が曲路を旋回するときの前照灯の光軸方向が運転者の意図する視線方向に適切に補正され調整される。
【0008】
請求項3の車両用前照灯光軸方向自動調整装置における到達点演算手段では、到達点に対して車速の変化に応じた、即ち、このときの到達点が基準とする車速の変化のときの到達点に一致するよう所定の制御係数が乗算され補正される。これにより、車両が曲路を旋回するときの前照灯の光軸方向が運転者の意図する視線方向に適切に補正され調整される。
【0010】
【発明の実施の形態】
以下、本発明の実施の形態を実施例に基づいて説明する。
【0011】
図1は本発明の実施の形態の一実施例にかかる車両用前照灯光軸方向自動調整装置の全体構成を示す概略図である。
【0012】
図1において、車両の前面には前照灯として左右のヘッドライト10L,10R及びこれらと別に左右のスイブル用ライト11L,11Rが配設されている。20はECU(Electronic Control Unit:電子制御ユニット)であり、ECU20は周知の各種演算処理を実行する中央処理装置としてのCPU21、制御プログラムを格納したROM22、各種データを格納するRAM23、B/U(バックアップ)RAM24、入出力回路25及びそれらを接続するバスライン26等からなる論理演算回路として構成されている。
【0013】
ECU20には、ステアリングホイール15の操舵角θs を検出する操舵角センサ16からの出力信号、車両の左車輪の左車輪速VL を検出する左車輪速センサ18Lからの出力信号、車両の右車輪の右車輪速VR を検出する右車輪速センサ18Rからの出力信号、その他の各種センサ信号が入力されている。そして、ECU20からの出力信号が車両の左右のスイブル用ライト11L,11Rの各アクチュエータ12L,12Rに入力され、後述するように、左右のスイブル用ライト11L,11Rの光軸方向が調整される。
【0014】
なお、本実施例の構成においては、図2に示すように、ヘッドライト10Lによるヘッドライト(左)配光領域(ロービーム)及びヘッドライト10Rによるヘッドライト(右)配光領域(ロービーム)の左右方向は固定されており、ステアリングホイール15の中立点から左方向への操舵に応じてスイブル用ライト11Lによる配光領域、ステアリングホイール15の中立点から右方向への操舵に応じてスイブル用ライト11Rによる配光領域がそれぞれスイブル制御範囲内にて調整される。
【0015】
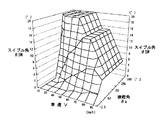
次に、本発明の実施の形態の一実施例にかかる車両用前照灯光軸方向自動調整装置による同一の曲率の左曲路に対する車速Vの違いによるスイブル制御を示す図3、図4及び図5の説明図に基づき、図6を参照して説明する。ここで、図6は左右の車輪速センサ18L,18Rから求められる車速Vと操舵角センサ16からの操舵角θs とに応じて車両の所定時間経過後の到達点に対して照射するよう設定された左右のスイブル用ライト11L,11Rのスイブル角θSWを示す3次元マップである。
【0016】
図3は本発明の実施の形態の一実施例にかかる車両用前照灯光軸方向自動調整装置による左曲路に対する車速Vが基準とする車速(適正車速)であるときのスイブル制御を示す説明図である。
【0017】
図3に示すように、このときの左曲路に対する車速Vが基準とする車速であり、「丸白抜」記号で示す現在の運転者の視線(アイポイント)方向と「丸黒塗」記号で示す車両の所定時間経過後の到達点とが一致している。このため、図6の3次元マップにて設定されるスイブル角θSWに基づく左のスイブル用ライト11Lの配光領域によれば、図3に示すように、「丸黒塗」記号で示す車両の所定時間経過後の到達点、即ち、「丸白抜」記号で示す現在の運転者の視線方向を中心として明るく照らすことができる。
【0018】
また、図4は図3と同一曲率の左曲路に対する車速Vが基準とする車速の約2倍であるときのスイブル制御を示す説明図である。
【0019】
図4に示すように、このときの左曲路に対する車速Vが基準とする車速の約2倍であり、「丸白抜」記号で示す現在の運転者の視線方向に対して「丸黒塗」記号で示す車両の所定時間経過後の到達点が約2倍の距離となっている。したがって、この場合には、図6の3次元マップにて設定されるスイブル角θSWが、車速Vと操舵角θs とに基づき算出された車両の所定時間経過後の到達点の約1/2倍に補正される。この演算結果に基づく左のスイブル用ライト11Lの配光領域によれば、図4に示すように、「丸黒塗」記号で示す車両の所定時間経過後の到達点の約1/2倍の距離、即ち、「丸白抜」記号で示す現在の運転者の視線方向を中心として明るく照らすことができる。
【0020】
そして、図5は図3と同一曲率の左曲路に対する車速Vが約1/2倍であるときのスイブル制御を示す説明図である。
【0021】
図5に示すように、このときの左曲路に対する車速Vが基準とする車速の約1/2倍であり、「丸白抜」記号で示す現在の運転者の視線方向に対して「丸黒塗」記号で示す車両の所定時間経過後の到達点が約1/2倍の距離となっている。したがって、この場合には、図6の3次元マップにて設定されるスイブル角θSWが、車速Vと操舵角θs とに基づき算出された車両の所定時間経過後の到達点の約2倍に補正される。この演算結果に基づく左のスイブル用ライト11Lの配光領域によれば、図5に示すように、「丸黒塗」記号で示す車両の所定時間経過後の到達点の約2倍の距離、即ち、「丸白抜」記号で示す現在の運転者の視線方向を中心として明るく照らすことができる。
【0022】
次に、本発明の実施の形態の一実施例にかかる車両用前照灯光軸方向自動調整装置による異なる曲率の左曲路に対する操舵角θs の違いによるスイブル制御を示す図7、図8及び図9の説明図に基づき、図6を参照して説明する。
【0023】
図7は本発明の実施の形態の一実施例にかかる車両用前照灯光軸方向自動調整装置による左曲路に対する操舵角θs が基準とする操舵角(適正操舵角)であるときのスイブル制御を示す説明図である。
【0024】
図7に示すように、このときの左曲路に対する操舵角θs が基準とする操舵角であり、「丸白抜」記号で示す現在の運転者の視線方向と「丸黒塗」記号で示す車両の所定時間経過後の到達点とが一致している。このため、図6の3次元マップにて設定されるスイブル角θSWに基づく左のスイブル用ライト11Lの配光領域によれば、図7に示すように、「丸黒塗」記号で示す車両の所定時間経過後の到達点、即ち、「丸白抜」記号で示す現在の運転者の視線方向を中心として明るく照らすことができる。
【0025】
また、図8は図7より曲率の大きな左曲路に対する操舵角θs が基準とする操舵角の約1/2倍であるときのスイブル制御を示す説明図である。図8に示すように、このときの左曲路に対する操舵角θs が基準とする操舵角の約1/2倍であるとすると、経験的に車速Vは約2倍となるため、「丸白抜」記号で示す現在の運転者の視線方向に対して「丸黒塗」記号で示す車両の所定時間経過後の到達点が約2倍の距離となっている。したがって、この場合には、図6の3次元マップにて設定されるスイブル角θSWが、車速Vと操舵角θs とに基づき算出された車両の所定時間経過後の到達点の約1/2倍に補正される。この演算結果に基づく左のスイブル用ライト11Lの配光領域によれば、図8に示すように、「丸黒塗」記号で示す車両の所定時間経過後の到達点の約1/2倍の距離、即ち、「丸白抜」記号で示す現在の運転者の視線方向を中心として明るく照らすことができる。
【0026】
そして、図9は図7より曲率の小さな左曲路に対する操舵角θs が基準とする操舵角の約2倍であるときのスイブル制御を示す説明図である。図9に示すように、このときの左曲路に対する操舵角θs が基準とする操舵角の約2倍であるとすると、経験的に車速Vは約1/2倍となるため、「丸白抜」記号で示す現在の運転者の視線方向に対して「丸黒塗」記号で示す車両の所定時間経過後の到達点が約1/2倍の距離となっている。したがって、この場合には、図6の3次元マップにて設定されるスイブル角θSWが、車速Vと操舵角θs とに基づき算出された車両の所定時間経過後の到達点の約2倍に補正される。この演算結果に基づく左のスイブル用ライト11Lの配光領域によれば、図9に示すように、「丸黒塗」記号で示す車両の所定時間経過後の到達点の約2倍の距離、即ち、「丸白抜」記号で示す現在の運転者の視線方向を中心として明るく照らすことができる。
【0027】
このように、本実施例の車両用前照灯光軸方向自動調整装置は、車速(車両の速度)Vを検出する車速検出手段としての左右の車輪速センサ18L,18Rと、車両のステアリングホイール15の操舵角θs を検出する操舵角検出手段としての操舵角センサ16と、左右の車輪速センサ18L,18Rで検出された車速Vと操舵角センサ16で検出された操舵角θs とに基づき車両の所定時間経過後の到達点を算出するECU20にて達成される到達点演算手段と、前記到達点演算手段で算出された到達点が車両の左右のスイブル用ライト11L,11R(前照灯)による照射範囲内となるよう左右のスイブル用ライト11L,11Rの光軸方向を調整するECU20にて達成される光軸方向調整手段とを具備するものである。
【0028】
また、本実施例の車両用前照灯光軸方向自動調整装置のECU20にて達成される到達点演算手段は、到達点に対して車速Vに応じた所定の制御係数を乗算し補正するものである。そして、本実施例の車両用前照灯光軸方向自動調整装置のECU20にて達成される到達点演算手段は、到達点に対して操舵角θs に応じた所定の制御係数を乗算し補正するものである。
【0029】
つまり、左右の車輪速センサ18L,18Rで検出された車速Vと操舵角センサ16で検出された操舵角θs とに基づき車両の所定時間経過後の到達点が算出され、その到達点が車両の左右のスイブル用ライト11L,11Rによる照射範囲内となるようそれらの光軸方向が調整される。このとき、車速Vによる到達点が、基準とする車速のときの到達点となるよう所定の制御係数が乗算され補正される。また、このとき、操舵角θs による到達点が、基準とする操舵角のときの到達点となるよう所定の制御係数が乗算され補正される。これにより、車両が曲路を旋回するときの左右のスイブル用ライト11L,11Rの光軸方向が、運転者の意図する視線方向に適切に調整され、運転者に違和感を与えることが抑止される。
【0030】
ところで、上記実施例では、左右のヘッドライト10L,10Rと別に配設された左右のスイブル用ライト11L,11Rによる車両の左右の配光領域を調整するスイブル制御について述べたが、本発明を実施する場合には、これに限定されるものではなく、左右のヘッドライト10L,10Rが左右のスイブル用ライトを兼ねた構成とすることもできる。
【0031】
また、上記実施例では、車両の所定時間経過後の到達点に対して車速Vまたは操舵角θs に応じた所定の制御係数を乗算し補正しているが、本発明を実施する場合には、これに限定されるものではなく、曲路の途中で車速の変化や操舵角の変化があったときには、その都度、その変化に応じた所定の制御係数を乗算するようにしてもよい。
【0032】
このような車両用前照灯光軸方向自動調整装置のECU20にて達成される到達点演算手段は、到達点に対して車速Vの変化または操舵角θs の変化に応じた所定の制御係数を乗算し補正するものであり、上述の実施例と同様の作用・効果が期待できる。なお、到達点の算出における所定の制御係数は、車速V、車速Vの変化、操舵角θs 、操舵角θs の変化を適宜、組合わせて設定することができる。
【図面の簡単な説明】
【図1】 図1は本発明の実施の形態の一実施例にかかる車両用前照灯光軸方向自動調整装置の全体構成を示す概略図である。
【図2】 図2は本発明の実施の形態の一実施例にかかる車両用前照灯光軸方向自動調整装置におけるヘッドライト及びスイブル用ライトの配光領域を示す説明図である。
【図3】 図3は本発明の実施の形態の一実施例にかかる車両用前照灯光軸方向自動調整装置による左曲路に対する適正車速によるスイブル制御を示す説明図である。
【図4】 図4は図3と同一の左曲路に対する車速が約2倍であるときのスイブル制御を示す説明図である。
【図5】 図5は図3と同一の左曲路に対する車速が約1/2倍であるときのスイブル制御を示す説明図である。
【図6】 図6は本発明の実施の形態の一実施例にかかる車両用前照灯光軸方向自動調整装置で用いられている車速と操舵角とに応じて車両の所定時間経過後の到達点に対して照射するよう設定された左右のスイブル用ライトのスイブル角を示す3次元マップである。
【図7】 図7は本発明の実施の形態の一実施例にかかる車両用前照灯光軸方向自動調整装置による左曲路に対する適正操舵角によるスイブル制御を示す説明図である。
【図8】 図8は図7より大きな曲率の左曲路に対する操舵角が約1/2倍であるときのスイブル制御を示す説明図である。
【図9】 図9は図7より小さな曲率の左曲路に対する操舵角が約2倍であるときのスイブル制御を示す説明図である。
【符号の説明】
11L,11R スイブル用ライト(前照灯)
12L,12R アクチュエータ
15 ステアリングホイール
16 操舵角センサ(操舵角検出手段)
18L,18R 車輪速センサ(車速検出手段)
20 ECU(電子制御ユニット)
Claims (3)
- 車両の速度を検出する車速検出手段と、
前記車両のステアリングホイールの操舵角を検出する操舵角検出手段と、
前記車速検出手段で検出された車速と前記操舵角検出手段で検出された操舵角とに基づき前記車両の所定時間経過後の到達点を算出する到達点演算手段と、
前記到達点演算手段で算出された前記到達点が前記車両の前照灯による照射範囲内となるよう前記前照灯の光軸方向を調整する光軸方向調整手段とを具備し、
前記到達点演算手段は、前記到達点に対して前記操舵角に応じた所定の制御係数を乗算し、また、前記到達点に対して前記操舵角の変化に応じた所定の制御係数を乗算して補正することを特徴とする車両用前照灯光軸方向自動調整装置。 - 前記到達点演算手段は、前記到達点に対して前記車速に応じた所定の制御係数を乗算し、補正することを特徴とする請求項1に記載の車両用前照灯光軸方向自動調整装置。
- 前記到達点演算手段は、前記到達点に対して前記車速の変化に応じた所定の制御係数を乗算し、補正することを特徴とする請求項1に記載の車両用前照灯光軸方向自動調整装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001263077A JP4396071B2 (ja) | 2001-08-31 | 2001-08-31 | 車両用前照灯光軸方向自動調整装置 |
| US10/230,410 US6778892B2 (en) | 2001-08-31 | 2002-08-29 | Vehicle headlamp optical axis control system |
| DE10239829.1A DE10239829B4 (de) | 2001-08-31 | 2002-08-29 | Steuersystem für die optische Achse von Fahrzeugscheinwerfern |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001263077A JP4396071B2 (ja) | 2001-08-31 | 2001-08-31 | 車両用前照灯光軸方向自動調整装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003072460A JP2003072460A (ja) | 2003-03-12 |
| JP4396071B2 true JP4396071B2 (ja) | 2010-01-13 |
Family
ID=19089889
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001263077A Expired - Lifetime JP4396071B2 (ja) | 2001-08-31 | 2001-08-31 | 車両用前照灯光軸方向自動調整装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US6778892B2 (ja) |
| JP (1) | JP4396071B2 (ja) |
| DE (1) | DE10239829B4 (ja) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1316474A3 (en) * | 2001-10-31 | 2006-05-31 | Dana Corporation | Automatic directional control system for vehicle headlights |
| JP4353764B2 (ja) * | 2003-10-10 | 2009-10-28 | 株式会社デンソー | 車両用前照灯光軸方向自動調整装置 |
| JP2005280681A (ja) * | 2004-03-05 | 2005-10-13 | Denso Corp | 車両用前照灯光軸方向自動調整装置 |
| WO2006057956A2 (en) * | 2004-11-23 | 2006-06-01 | Core Relations Development Corporation | Techniques for magazine like presentation of advertisement using computers |
| JP4441877B2 (ja) * | 2005-06-09 | 2010-03-31 | 株式会社デンソー | 車両用前照灯装置 |
| EP1757486B1 (en) * | 2005-08-26 | 2014-04-30 | Nissan Motor Co., Ltd. | Device and method for controlling vehicle headlamps |
| JP2007176428A (ja) * | 2005-12-28 | 2007-07-12 | Denso Corp | 車両用前照灯装置 |
| JP4506703B2 (ja) * | 2006-03-27 | 2010-07-21 | トヨタ自動車株式会社 | 車両用前照灯制御装置 |
| JP4635263B2 (ja) | 2007-01-19 | 2011-02-23 | 国立大学法人北海道大学 | 前照灯照射角度制御システム |
| EP2036769B1 (en) * | 2007-09-14 | 2012-02-08 | Koito Manufacturing Co., Ltd. | Lamp system and lamp deflection control method |
| JP4999653B2 (ja) * | 2007-11-19 | 2012-08-15 | アイシン精機株式会社 | 車両用ランプ制御システム |
| JP4999651B2 (ja) * | 2007-11-19 | 2012-08-15 | アイシン精機株式会社 | 車両用ランプ制御システム |
| US8396628B2 (en) * | 2010-02-01 | 2013-03-12 | Ford Global Technologies | Power on demand steering wheel angle sensor |
| CN101817324B (zh) * | 2010-05-18 | 2012-05-30 | 吉林大学 | 仿驾驶员预瞄行为的汽车智能前照灯系统 |
| US20130169679A1 (en) * | 2011-12-30 | 2013-07-04 | Automotive Research & Test Center | Vehicle image display system and correction method thereof |
| US20130308063A1 (en) * | 2012-05-17 | 2013-11-21 | Synchear, Llc | Method, system, and device for relaying information through a mobile phone or personal display device |
| WO2015167610A1 (en) * | 2014-04-29 | 2015-11-05 | Razmik Karabed | Dynamically adjustable mirrors |
| JP6587450B2 (ja) | 2015-08-07 | 2019-10-09 | 株式会社小糸製作所 | 車両用灯具 |
| US20170327038A1 (en) * | 2016-05-10 | 2017-11-16 | Razmik Karabed | Image process based, dynamically adjusting vehicle surveillance system for intersection traffic |
| KR101857883B1 (ko) * | 2016-11-30 | 2018-06-19 | 엘에스오토모티브테크놀로지스 주식회사 | 차량 전조등 스위블링 장치 및 이의 제어 방법 |
| US20190031084A1 (en) * | 2017-07-27 | 2019-01-31 | International Business Machines Corporation | Adaptive vehicle illumination utilizing visual pattern learning and cognitive enhancing |
| CN111559308B (zh) * | 2020-05-28 | 2023-02-07 | 哈尔滨工业大学 | 一种车辆自适应弯道照明系统及其控制方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2783079B2 (ja) * | 1992-08-28 | 1998-08-06 | トヨタ自動車株式会社 | ヘッドランプの配光制御装置 |
| US5488545A (en) * | 1993-06-30 | 1996-01-30 | Nippondenso Co., Ltd. | Lighting fixture control apparatus for vehicle |
| JPH07312103A (ja) * | 1994-03-22 | 1995-11-28 | Nippondenso Co Ltd | 灯具装置 |
| JPH10166934A (ja) * | 1996-12-13 | 1998-06-23 | Koito Mfg Co Ltd | 車輌用灯具装置 |
| JP2001213227A (ja) * | 2000-02-04 | 2001-08-07 | Koito Mfg Co Ltd | 車輌用照明システム |
| JP3753932B2 (ja) * | 2000-08-09 | 2006-03-08 | 株式会社小糸製作所 | 車両用前照灯システム |
| JP2002104065A (ja) * | 2000-09-28 | 2002-04-09 | Denso Corp | 車両用前照灯光軸方向自動調整装置 |
-
2001
- 2001-08-31 JP JP2001263077A patent/JP4396071B2/ja not_active Expired - Lifetime
-
2002
- 2002-08-29 US US10/230,410 patent/US6778892B2/en not_active Expired - Lifetime
- 2002-08-29 DE DE10239829.1A patent/DE10239829B4/de not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| DE10239829B4 (de) | 2015-07-23 |
| DE10239829A1 (de) | 2003-03-20 |
| US20030055548A1 (en) | 2003-03-20 |
| US6778892B2 (en) | 2004-08-17 |
| JP2003072460A (ja) | 2003-03-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4396071B2 (ja) | 車両用前照灯光軸方向自動調整装置 | |
| JP2002104065A (ja) | 車両用前照灯光軸方向自動調整装置 | |
| JP2005178678A (ja) | 車両用前照灯光軸方向自動調整装置 | |
| JP2001347882A (ja) | 車両用前照灯光軸方向自動調整装置 | |
| US7195378B2 (en) | Vehicle lighting apparatus | |
| JP2003072461A (ja) | 車両用前照灯光軸方向自動調整装置 | |
| US7810970B2 (en) | Method and apparatus for controlling swivel angle of on-vehicle headlight | |
| US6688761B2 (en) | Vehicle headlamp automatic adjusting device with sensor failure detection means | |
| JP4593034B2 (ja) | 車両用前照灯光軸方向自動調整装置 | |
| JP4749020B2 (ja) | 車両用前照灯装置 | |
| JP4457754B2 (ja) | 車両用前照灯光軸方向自動調整装置 | |
| US8862335B2 (en) | Procedure and device for the controlling vertical cut-off lines in headlamps within a swivel range | |
| JP2005239122A (ja) | 車両用前照灯光軸方向自動調整装置 | |
| US6671640B2 (en) | Automatic optical-axis adjusting device for automatically adjusting directions of optical axes of front lights with respect to steering angle of steering wheel | |
| US20060291228A1 (en) | Vehicle headlight apparatus | |
| JP2006151358A (ja) | 車両用前照灯光軸方向自動調整装置 | |
| JP4266549B2 (ja) | 車両用前照灯光軸方向自動調整装置 | |
| JP4396428B2 (ja) | 車両用前照灯光軸方向自動調整装置 | |
| US7153007B2 (en) | Vehicle lighting apparatus | |
| JP4353764B2 (ja) | 車両用前照灯光軸方向自動調整装置 | |
| JP3910033B2 (ja) | 車両用前照灯光軸方向自動調整装置 | |
| US9002587B2 (en) | Method and device for adjusting a beam direction of a headlight, and motor vehicle | |
| JP2012061878A (ja) | 配光制御装置 | |
| JP3833822B2 (ja) | 車両前照灯制御装置 | |
| JPS6064044A (ja) | 自動車用ヘッドライト制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070913 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090625 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090630 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090828 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090929 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091012 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121030 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4396071 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121030 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131030 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |