JP4358149B2 - ハイブリッド車両の動力伝達装置 - Google Patents
ハイブリッド車両の動力伝達装置 Download PDFInfo
- Publication number
- JP4358149B2 JP4358149B2 JP2005135696A JP2005135696A JP4358149B2 JP 4358149 B2 JP4358149 B2 JP 4358149B2 JP 2005135696 A JP2005135696 A JP 2005135696A JP 2005135696 A JP2005135696 A JP 2005135696A JP 4358149 B2 JP4358149 B2 JP 4358149B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- connection
- separation
- state
- clutch
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
Landscapes
- Arrangement Of Transmissions (AREA)
- Hybrid Electric Vehicles (AREA)
- Hydraulic Clutches, Magnetic Clutches, Fluid Clutches, And Fluid Joints (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
本発明は上記事情に鑑みてなされたもので、ハイブリッド車両の運転効率を向上させることが可能なハイブリッド車両の動力伝達装置を提供することを目的とする。
さらに、請求項5に記載の本発明のハイブリッド車両の動力伝達装置は、前記接続分離制御手段により前記接続分離手段の接続または分離が設定される際に参照される前記モータの状態量を、前記モータの温度または電圧に係る状態量に応じて補正する補正手段(例えば、実施の形態でのステップS51、ステップS56)を備えることを特徴としている。
さらに、請求項3に記載の本発明のハイブリッド車両の動力伝達装置によれば、接続分離手段の動作を第2のモータの損失に応じて詳細に制御することができる。
さらに、請求項5に記載の本発明のハイブリッド車両の動力伝達装置によれば、接続分離手段の動作に対してモータの状態を適切に反映させることができる。
この発明の実施形態に係るハイブリッド車両1は、例えば図1に示すように、内燃機関Eと、第1モータMaと、トルクコンバータTCと、トランスミッションTとを直列に直結して、左右の駆動輪(前輪あるいは後輪)W,W間で駆動力を配分するディファレンシャルDに連結すると共に、第2モータMbをクラッチCを介してディファレンシャルDに連結した構造のものである。そして、内燃機関Eおよび第1モータMaの両方の駆動力は、トルクコンバータTCと、オートマチックトランスミッション(AT)からなるトランスミッションTとから、ディファレンシャルDを介して車両の駆動輪W,Wに伝達され、第2モータMbの駆動力は、クラッチCからディファレンシャルDを介して車両の駆動輪W,Wに伝達される。また、ハイブリッド車両1の減速時に駆動輪W側から各モータMa,Mb側に駆動力が伝達されると、各モータMa,Mbは発電機として機能していわゆる回生制動力を発生し、車体の運動エネルギーを電気エネルギーとして回収する。さらに、ハイブリッド車両1の運転状態に応じて、第1モータMaは内燃機関Eの出力により発電機として駆動され、発電エネルギーを発生するようになっている。
各パワードライブユニット2a,2bの電力変換動作は、電子制御ユニット4からPWMインバータの各スイッチング素子に入力されるパルス、つまりパルス幅変調(PWM)により各スイッチング素子をオン/オフ駆動させるためのパルスに応じて制御され、このパルスのデューティ、つまりオン/オフの比率のマップ(データ)は予め電子制御ユニット4に記憶されている。
さらに、タービンランナ11cとフロントカバー11aとの間には、フロントカバー11aの内面に向かい押圧され、フロントカバー11aに係合するロックアップクラッチ11eが備えられている。
そして、フロントカバー11aおよびポンプインペラ11bにより形成される容器内に作動油(ATF:Automatic Transmission Fluid)が封入されている。
また、ロックアップクラッチ11eが係合状態に設定されると、フロントカバー11aからタービンランナ11cへと、作動油を介さず直接に回転駆動力が伝達される。
なお、ロックアップクラッチ11eの係合状態は可変とされ、ロックアップクラッチ11eを介してフロントカバー11aからタービンランナ11cおよび出力軸へと伝達される回転駆動力は任意に変更可能とされている。
そして、出力側前進1速ギア31bおよび出力側前進2速ギア32bは第1出力軸12Bと一体に設けられており、出力側前進2速ギア32bと対をなす駆動側前進2速ギア32aは、第1駆動軸12Cに対して回転可能のアイドルギアとされ、2速用クラッチ22によって第1駆動軸12Cに対して接続または分離される。
そして、ワンウェイクラッチ21aは、各クラッチ22,…,26の接続が解除された状態において、第1入力軸12Aが回転すると第1駆動軸12Cを介して第1出力軸12Bへ駆動力を伝達する。そして、各クラッチ22,…,26が接続状態となる場合であっても、第1入力軸12Aが回転すると、1速用クラッチ21によって第1駆動軸12Cに接続された駆動側前進1速ギア31aは第1駆動軸12Cと共に回転するが、ワンウェイクラッチ21aの作用で第1駆動軸12Cから第1出力軸12Bへと駆動力は伝達されないように設定されている。
そして、入力側前進3速ギア33aは第1入力軸12Aと一体に設けられ、第1駆動3速ギア33cは第1駆動軸12Cと一体に設けられ、入力側前進3速ギア33aおよび第1駆動3速ギア33cと噛み合う出力側前進3速ギア33bは、第1駆動軸12Cに対して回転可能のアイドルギアとされている。さらに、入力側前進3速ギア33aと噛み合う第2駆動3速ギア33dは第2駆動軸12Dに対して回転可能のアイドルギアとされ、3速用クラッチ23によって第2駆動軸12Dに対して接続または分離される。
そして、入力側前進4速ギア34aは第1入力軸12Aに対して回転可能のアイドルギアとされ、4速用クラッチ24によって第1入力軸12Aに対して接続または分離される。また、入力側前進4速ギア34aと噛み合う出力側前進4速ギア34bは第1出力軸12Bと一体に設けられ、駆動4速ギア34dは第2駆動軸12Dと一体に設けられている。
そして、後述する入力側後進ギア36aと同軸かつ一体に設けられた入力側前進5速ギア35aは、第1入力軸12Aに対して回転可能のアイドルギアとされ、5速・後進用クラッチ25によって第1入力軸12Aに対して接続または分離される。また、出力側前進5速ギア35bは、第1出力軸12Bに対して回転可能のアイドルギアとされ、クラッチ26によって第1出力軸12Bに対して接続または分離される。
そして、入力側前進5速ギア35aと同軸かつ一体に設けられた入力側後進ギア36aは、第1入力軸12Aに対して回転可能のアイドルギアとされ、5速・後進用クラッチ25によって第1入力軸12Aに対して接続または分離される。
また、出力側後進ギア36bは、第1出力軸12Bに対して回転可能のアイドルギアとされ、クラッチ26によって第1出力軸12Bに対して接続または分離される。つまり、クラッチ26は、出力側前進5速ギア35bまたは出力側後進ギア36bを選択的に第1出力軸12Bに対して接続または分離可能である。
また、後進アイドルギア36eは後進ギア軸12Eと一体に設けられている。
この1速では、順次、入力側前進3速ギア33aと、出力側前進3速ギア33bと、第1駆動3速ギア33cと、出力側前進1速ギア31bと、出力側前進2速ギア32bとを介して、第1入力軸12Aから第1出力軸12Bへと駆動力が伝達される。
そして、2速では、順次、入力側前進3速ギア33aと、出力側前進3速ギア33bと、第1駆動3速ギア33cと、駆動側前進2速ギア32aと、出力側前進2速ギア32bとを介して、第1入力軸12Aから第1出力軸12Bへと駆動力が伝達される。
そして、3速では、順次、入力側前進3速ギア33aと、第2駆動3速ギア33dと、駆動4速ギア34dと、入力側前進4速ギア34aと、出力側前進4速ギア34bとを介して、第1入力軸12Aから第1出力軸12Bへと駆動力が伝達される。
そして、4速では、順次、入力側前進4速ギア34aと、出力側前進4速ギア34bとを介して、第1入力軸12Aから第1出力軸12Bへと駆動力が伝達される。
これにより、順次、入力側前進5速ギア35aと、出力側前進5速ギア35bとを介して、第1入力軸12Aから第1出力軸12Bへと駆動力が伝達される。
これにより、順次、入力側後進ギア36aと、出力側後進ギア36bとを介して、第1入力軸12Aから第1出力軸12Bへと駆動力が伝達される。
そして、第2入力軸42Aと一体に設けられた入力側ギア43aと駆動軸42Cと一体に設けられたアイドルギア43bとは常に噛み合い、アイドルギア43bと、第2出力軸42Bに対して回転可能のアイドルギアである出力側ギア43bとは、常に噛み合い、出力側ギア43bはクラッチCによって第2出力軸42Bに対して接続または分離される。
このため、電子制御ユニット4には、例えばパワープラント(つまり内燃機関11およびモータ12)の状態を検出する各種のセンサ(例えば、内燃機関Eの回転数を検出する回転数センサや、各モータMa,Mb毎にロータの磁極位置(位相角)θを検出する磁極位置センサ61や、各モータMa,Mb毎に各相のステータ巻線に供給される各相電流Iu,Iv,Iwを検出する相電流検出器62や、内燃機関Eの冷却水の温度(冷却水温)TWおよび各モータMa,Mbの温度を検出する各温度センサ等)から出力される信号およびハイブリッド車両1の状態を検出する各種のセンサ、例えば速度を検出する車速センサから出力される信号等に加えて、バッテリ3の蓄電電圧VBを検出する電圧センサから出力される信号と、バッテリ3の充電電流および放電電流を検出する電流センサから出力される信号と、バッテリ3の温度(バッテリ温度)TBおよびトランスミッションTの作動油の温度(作動油温)TT等を検出する各温度センサから出力される信号とが入力されている。
電流指令演算部52は、各モータMa,Mbの駆動または回生時においてトルク指令値Tqおよび磁極位置センサ61から入力される回転角速度ωに基づき、各パワードライブユニット2a,2bから各モータMa,Mbに供給する各相電流Iu,Iv,Iwを指定するための電流指令を演算しており、この電流指令は、回転する直交座標上でのId指令およびIq指令として出力されている。
非干渉制御部54は、d軸とq軸との間で干渉し合う速度起電力成分を相殺してd軸およびq軸を独立して制御するために、d軸およびq軸に対する各干渉成分を相殺するd軸補償項およびq軸補償項を算出する。
加算器55は、d軸電圧指令値Vdとd軸補償項とを加算して得た値を、新たにd軸電圧指令値Vdとして設定し、q軸電圧指令値Vqとq軸補償項とを加算して得た値を、新たにq軸電圧指令値Vqとして設定する。
DUTY変換部57は、各電圧指令値Vu,Vv,Vwを、各パワードライブユニット2a,2bの各スイッチング素子をパルス幅変調(PWM)によりオン/オフ駆動させる各パルスからなるスイッチング指令(つまり、パルス幅変調信号)へと変換する。なお、各パルスのデューティは予めDUTY変換部57に記憶されている。
先ず、例えば図3に示すステップS01においては、バッテリ温度TBが所定温度#T1よりも高いか否かを判定する。
この判定結果が「NO」の場合には、ステップS02に進み、このステップS02においては、通常処理条件が不成立状態であるとして、後述するステップS06に進む。
一方、この判定結果が「YES」の場合には、ステップS03に進む。
そして、ステップS03においては、冷却水温TWが所定温度#T2よりも高いか否かを判定する。
ステップS03の判定結果が「NO」の場合には、ステップS02に進む。
一方、ステップS03の判定結果が「YES」の場合には、ステップS04に進む。
そして、ステップS04においては、作動油温TTが所定温度#T3よりも高いか否かを判定する。
ステップS04の判定結果が「NO」の場合には、ステップS02に進む。
一方、ステップS04の判定結果が「YES」の場合には、ステップS05に進み、このステップS05においては、通常処理条件が成立状態であるとして、ステップS06に進む。
この判定結果が「YES」の場合には、一連の処理を終了する。
一方、この判定結果が「NO」の場合には、ステップS07に進む。
そして、ステップS07においては、クラッチCがOFF状態つまり分離状態か否かを判定する。
ステップS07の判定結果が「YES」の場合には、一連の処理を終了する。
一方、ステップS07の判定結果が「NO」の場合には、ステップS08に進む。
そして、ステップS08においては、クラッチCをOFF状態に設定して、一連の処理を終了する。
先ず、例えば図4に示すステップS11においては、バッテリ温度TBが所定温度#T1よりも高いか否かを判定する。
この判定結果が「NO」の場合には、ステップS12に進み、このステップS12においては、通常処理条件が不成立状態であるとして、後述するステップS16に進む。
一方、この判定結果が「YES」の場合には、ステップS13に進む。
そして、ステップS13においては、冷却水温TWが所定温度#T2よりも高いか否かを判定する。
ステップS13の判定結果が「NO」の場合には、ステップS12に進む。
一方、ステップS13の判定結果が「YES」の場合には、ステップS14に進む。
そして、ステップS14においては、作動油温TTが所定温度#T3よりも高いか否かを判定する。
ステップS14の判定結果が「NO」の場合には、ステップS12に進む。
一方、ステップS14の判定結果が「YES」の場合には、ステップS15に進み、このステップS15においては、通常処理条件が成立状態であるとして、ステップS16に進む。
この判定結果が「NO」の場合には、一連の処理を終了する。
一方、この判定結果が「YES」の場合には、ステップS17に進む。
そして、ステップS17においては、クルーズ判定処理を実行する。このクルーズ判定処理では、例えば図5および下記数式(1),(2)に示すように、車速センサにより検出される車両の速度(車速)Vの時間に関する一次微分からなる加速度v’と車速Vの時間に関する二次微分からなる加加速度v”とに基づき記述されるノルムrおよび位相θに応じて、車両の走行状態を判定する。
例えば、ノルムrが所定値以下であれば、車両の加速度が中程度の大きさとなるクルーズ走行状態であると判定し、このとき、位相θがゼロに近い値となることに伴い、クルーズ走行状態であると判定される度合が大きくなるように設定されている。
また、ノルムrが所定値よりも大きく、かつ、位相θが所定値よりも小さい場合には、減速走行状態であると判定し、ノルムrが所定値よりも大きく、かつ、位相θが所定値よりも大きい場合には、加速走行状態であると判定する。

そして、ステップS19においては、第2モータMbの状態に係るモータ状態量を、各種センサによる検出および所定マップに対するマップ検索等により取得する。モータ状態量は、例えば、d軸電流Idによる弱め界磁電流、一次電流、電力、力率、逆起電圧、電圧振幅、電流振幅、電機子抵抗、d軸およびq軸インダクタンス、電機子鎖交磁束の実効値、銅損および鉄損等からなるモータ損失、第2パワードライブユニット2bでの電力損失等からなるPDU損失、モータの温度等とされている。そして、例えば図6に示すように、モータ損失等の適宜のモータ状態量は、所定マップにおいて第2モータMbの回転数および温度および電圧に応じて変化するように設定されている。これにより、例えばモータ損失に対して、クラッチCの接続または分離を判定するための所定の閾値を設定した場合には、クラッチCが接続または分離される際の回転数が、温度および電圧に応じて変化することになる。つまり、クラッチCが接続または分離が設定される際に参照される第2モータの状態量としての回転数が、第2モータの温度または電圧に応じて補正されることになる。
そして、ステップS21においては、クラッチCのON判定が成立したか否かを判定する。
この判定結果が「NO」の場合には、後述するステップS24に進む。
一方、この判定結果が「YES」の場合には、ステップS22に進む。
そして、ステップS22においては、クラッチCをON状態つまり接続状態に設定する。
そして、ステップS23においては、第2モータMbを力行または回生により駆動させ、一連の処理を終了する。
また、ステップS24においては、クラッチCをOFF状態つまり分離状態に設定する。
そして、ステップS25においては、第2モータMbを停止させ、一連の処理を終了する。
先ず、例えば図7に示すステップS31においては、クラッチCがON状態か否かを判定する。
この判定結果が「NO」の場合には、後述するステップS38に進む。
一方、この判定結果が「YES」の場合には、ステップS32に進む。
そして、ステップS32においては、クラッチCのON状態またはOFF状態の判定結果と、クルーズ判定処理の判定結果と、変速比演算処理により算出された変速比(例えば、変速比の値自体に加えて、シフトポジションが4速、5速、6速等のように変速比が相対的に小さいか否かの判定結果等)とに応じて所定のマップに対するマップ検索を行い、クラッチCの動作(ON動作またはOFF動作)を検索する。
そして、ステップS33においては、マップ検索の検索結果がOFF動作であるか否かを判定する。
この判定結果が「YES」の場合には、ステップS34に進み、このステップS34においては、クラッチCの動作判定をOFF判定として、一連の処理を終了する。
一方、この判定結果が「NO」の場合には、ステップS35に進む。
そして、ステップS36においては、動作判定結果がOFF動作であるか否かを判定する
この判定結果が「YES」の場合には、上述したステップS34に進む。
一方、この判定結果が「NO」の場合には、ステップS37に進み、このステップS37においては、クラッチCの動作判定をON判定として、一連の処理を終了する。
そして、ステップS39においては、マップ検索の検索結果がOFF動作であるか否かを判定する。
この判定結果が「YES」の場合には、ステップS40に進み、このステップS40においては、クラッチCの動作判定をOFF判定として、一連の処理を終了する。
一方、この判定結果が「NO」の場合には、ステップS41に進む。
そして、ステップS42においては、動作判定結果がOFF動作であるか否かを判定する
この判定結果が「YES」の場合には、上述したステップS40に進む。
一方、この判定結果が「NO」の場合には、ステップS44に進み、このステップS44においては、クラッチCの動作判定をON判定として、一連の処理を終了する。
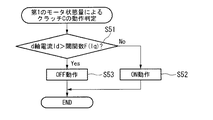
先ず、例えば図8に示すステップS51においては、第1のモータ状態量として、例えば弱め界磁電流とされるd軸電流Idが、q軸電流Iqに応じた所定の閾関数F(Iq)の値よりも大きいか否かを判定する。
この判定結果が「NO」の場合には、ステップS52に進み、このステップS52においては、動作判定結果をON動作として、一連の処理を終了する。
一方、この判定結果が「YES」の場合には、ステップS53に進み、このステップS53においては、動作判定結果をOFF動作として、一連の処理を終了する。
なお、第1のモータ状態量とされる弱め界磁電流、つまりd軸電流Idは、第2モータMbの温度、電圧、回転数に応じて変化し、さらに、例えば図9に示すように、q軸電流Iqがゼロである状態、つまり第2モータMbのトルク出力がゼロであって、アクセル開度がゼロで第2モータMbが回転している状態でのd軸電流Idの変化を示す所定関数H(回転数)は、アクセル開度が増大することに伴い、回転数の高回転側にシフトするようになっている。
そして、q軸電流Iqに応じた所定の閾関数F(Iq)は、例えば図10に示すように、q軸電流Iqがゼロから増大あるいは減少することに伴い、増大傾向に変化するように設定されている。
先ず、例えば図11に示すステップS56においては、第2のモータ状態量として、例えばモータ損失が、第2モータMbの温度、電圧、回転数等に応じた所定の閾関数G(温度,電圧,回転数)の値よりも大きいか否かを判定する。
この判定結果が「NO」の場合には、ステップS57に進み、このステップS57においては、動作判定結果をON動作として、一連の処理を終了する。
一方、この判定結果が「YES」の場合には、ステップS58に進み、このステップS58においては、動作判定結果をOFF動作として、一連の処理を終了する。
なお、第2のモータ状態量とされるモータ損失は、第2モータMbの温度、電圧、回転数に加えて、d軸電流Idに応じて変化し、さらに、例えば図12に示すように、q軸電流Iqがゼロである状態、つまり第2モータMbのトルク出力がゼロであって、アクセル開度がゼロで第2モータMbが回転している状態でのモータ損失の変化を示す所定関数J(Id)は、アクセル開度が増大することに伴い、d軸電流Idの高電流側にシフトするようになっている。
そして、運転者によるアクセル操作量の増大に伴って車速が増大し続ける状態では、例えば時刻t1以降のように、クラッチCのON状態を維持した状態で第2モータMbによるEV走行が停止され、内燃機関Eが始動され、この内燃機関Eの駆動力により車両が走行駆動されると共に、内燃機関Eの出力により第1モータMaの発電が開始される。
そして、時刻t3以降のように、運転者によるアクセル操作量の増大に伴って車速が増大し続ける状態では、クラッチCのON状態を維持した状態で第2モータMbによるEV走行が停止され、内燃機関Eが始動され、この内燃機関Eの駆動力により車両が走行駆動されると共に、内燃機関Eの出力により第1モータMaの発電が開始される。このとき、車速がEV走行の実行を許可する上限車速VEVよりも速い場合には、時刻t4以降のように運転者によるアクセル操作量が増大しない状態であっても、第2モータMbによるEV走行の実行が禁止される。
そして、時刻t6以降のように、運転者によるアクセル操作量が増大しない状態では、第2モータのアシスト動作が停止され、内燃機関Eの一部の気筒が休止されて休筒運転が実行されると共に、内燃機関Eの出力の低下分を補うようにして第1モータMaにより内燃機関Eの出力を補助する第1モータのアシスト動作が実行され、運転者によるアクセル操作量つまりパワープラントに対する要求トルクが、休筒運転の実行を許可するための内燃機関Eのトルクの所定上限値である休筒上限トルクよりも大きい場合であっても、第1モータのアシストトルクによって休筒運転の実行を可能とする休筒拡大アシスト状態となる。
そして、このようにパワープラントに対する要求トルクが一定となり、しかも、車速が所定の中車速VM以上かつ所定の高車速VH未満である状態において、例えばクルーズ判定処理によりクルーズ走行状態であると判定されると、この判定結果と共にトランスミッションTの変速比の算出結果およびクラッチCの状態に応じて、例えばクラッチCがOFF状態(分離状態)に設定される。
また、クラッチCの接続または分離を第2モータMbの異なる状態量に応じて選択することにより、詳細な制御を行うことができる。
さらに、第2モータMbの温度または電圧に応じて、クラッチCの接続または分離を設定する際に参照される第2モータMbの状態量を補正することにより、クラッチCの動作に対して第2モータMbの状態を適切に反映させることができる。
しかも、バッテリ温度TB、冷却水温TW、作動油温TTに応じて、クラッチCのON動作またはOFF動作の実行許可を判定することにより、クラッチCを適切に制御することができる。
例えば、内燃機関Eおよび第1モータMaをフロントデファレンシャルDFに連結し、第2モータMbをリアデファレンシャルDRに連結することによって、ハイブリッド車両1を、前輪のみが駆動される前輪駆動状態と前輪および後輪が駆動される4輪駆動状態とを適宜に切換可能な車両としてもよい。
10 ハイブリッド車両の動力伝達装置
ステップS20 接続分離制御手段
ステップS32 第1制御手段
ステップS33 分離制御手段
ステップS34 分離制御手段
ステップS35 第2制御手段
ステップS38 第1制御手段
ステップS51 補正手段
ステップS56 補正手段
Claims (6)
- 内燃機関および第1のモータおよび第2のモータを駆動源として備え、少なくとも、前記内燃機関または前記第1のモータの何れか一方を変速機を介して車両の駆動輪に連結し、前記第2のモータを接続分離手段を介して車両の駆動輪に連結して、駆動力を前記駆動輪に伝達するハイブリッド車両の動力伝達装置であって、
前記接続分離手段による前記第2のモータと前記駆動輪との接続または分離の状態かどうかを判定する判定手段を備え、
該判定手段により、前記接続分離手段により前記第2のモータと前記駆動輪とが接続状態であると判定された場合に、前記第2のモータの弱め界磁電流が、前記第2のモータのトルク電流がゼロから増大あるいは減少することに伴い、増大傾向に変化するように設定されている所定閾値を超えるか否かの判定結果に応じて、前記接続分離手段の接続動作または分離動作を選択する接続分離制御手段を備えることを特徴とするハイブリッド車両の動力伝達装置。 - 前記接続分離制御手段は、前記第2のモータの弱め界磁電流が前記所定閾値を超えた場合には前記接続分離手段の分離動作を選択し、前記第2のモータの弱め界磁電流が前記所定閾値未満である場合には前記接続分離手段の接続動作を選択することを特徴とする請求項1に記載のハイブリッド車両の動力伝達装置。
- 前記判定手段により、前記接続分離手段により前記第2のモータと前記駆動輪とが分離状態であると判定された場合に、前記接続分離制御手段は、前記第2のモータの損失が、アクセル開度が増大するに従って弱め界磁電流が大きく設定されるに伴い、増大傾向に変化するように設定されている所定の閾値を超えるか否かの判定結果に応じて接続動作または分離動作を選択することを特徴とする請求項1または請求項2に記載のハイブリッド車両の動力伝達装置。
- 前記接続分離制御手段は、前記第2のモータの損失が前記所定の閾値を超えた場合には前記接続分離手段の分離動作を選択し、前記第2のモータの損失が前記所定の閾値未満である場合には前記接続分離手段の接続動作を選択することを特徴とする請求項3に記載のハイブリッド車両の動力伝達装置。
- 前記接続分離制御手段により前記接続分離手段の接続または分離が設定される際に参照される前記モータの状態量を、前記モータの温度または電圧に係る状態量に応じて補正する補正手段を備えることを特徴とする請求項1から請求項4の何れか1つに記載のハイブリッド車両の動力伝達装置。
- 車両の状態が所定のクルーズ走行状態か否かの判定結果および前記接続分離手段の状態に応じて前記接続分離手段の接続動作または分離動作を選択する第1制御手段と、
前記モータの弱め界磁電流に基づき前記接続分離手段の接続動作または分離動作を選択する第2制御手段と、
前記第1制御手段により前記接続分離手段の分離動作が選択された場合に、前記第2制御手段による前記接続分離手段の接続動作または分離動作の選択結果に関わらずに、前記接続分離手段の分離動作を選択する分離制御手段と
を備えることを特徴とする請求項1から請求項4の何れか1つに記載のハイブリッド車両の動力伝達装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005135696A JP4358149B2 (ja) | 2005-05-09 | 2005-05-09 | ハイブリッド車両の動力伝達装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005135696A JP4358149B2 (ja) | 2005-05-09 | 2005-05-09 | ハイブリッド車両の動力伝達装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006312374A JP2006312374A (ja) | 2006-11-16 |
| JP4358149B2 true JP4358149B2 (ja) | 2009-11-04 |
Family
ID=37534051
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005135696A Expired - Fee Related JP4358149B2 (ja) | 2005-05-09 | 2005-05-09 | ハイブリッド車両の動力伝達装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4358149B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6670195B2 (ja) * | 2016-07-19 | 2020-03-18 | 本田技研工業株式会社 | 駆動装置 |
| JP7135847B2 (ja) * | 2018-12-27 | 2022-09-13 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
-
2005
- 2005-05-09 JP JP2005135696A patent/JP4358149B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006312374A (ja) | 2006-11-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7854680B2 (en) | Control device and control method for power train | |
| EP1967431B1 (en) | Control apparatus of driving system for vehicle | |
| EP1847415A1 (en) | Control apparatus for electric vehicles | |
| JP4455563B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6694405B2 (ja) | 輸送機器の制御装置 | |
| JP3858487B2 (ja) | パワートレーンの制御装置 | |
| JP4358149B2 (ja) | ハイブリッド車両の動力伝達装置 | |
| JP5842661B2 (ja) | 車両用動力伝達装置 | |
| JP6269589B2 (ja) | 電動車両 | |
| JP5125093B2 (ja) | 車両用モータ制御装置および車両用モータ制御方法 | |
| US10471949B2 (en) | Automobile equipped with three-phase motor | |
| JP4372778B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5761327B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6011170B2 (ja) | モータ制御装置およびモータ制御方法 | |
| JP3692796B2 (ja) | ハイブリッド車両 | |
| JP2014133554A (ja) | ハイブリッド車両の制御装置 | |
| JP2021164210A (ja) | 車両用駆動装置 | |
| JP2012157199A (ja) | 電気自動車の制御装置 | |
| JP2005132181A (ja) | パラレルハイブリッド車両 | |
| WO2015060329A1 (ja) | ハイブリッド車両用駆動装置 | |
| JP4144572B2 (ja) | ハイブリッド車両のモード遷移制御装置 | |
| JP5394187B2 (ja) | 車両 | |
| JP5374552B2 (ja) | ハイブリッド車両及びその制御方法 | |
| JP3804667B2 (ja) | 電動車両駆動制御装置及び電動車両駆動制御方法 | |
| JP6699252B2 (ja) | 自動車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080507 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080707 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090421 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090622 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090728 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090805 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120814 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4358149 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120814 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130814 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140814 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |