JP2012157199A - 電気自動車の制御装置 - Google Patents
電気自動車の制御装置 Download PDFInfo
- Publication number
- JP2012157199A JP2012157199A JP2011015572A JP2011015572A JP2012157199A JP 2012157199 A JP2012157199 A JP 2012157199A JP 2011015572 A JP2011015572 A JP 2011015572A JP 2011015572 A JP2011015572 A JP 2011015572A JP 2012157199 A JP2012157199 A JP 2012157199A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- shift
- speed
- output
- electric vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Control Of Transmission Device (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
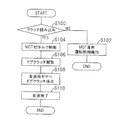
【解決手段】車両に搭載されるモータと、少なくとも運転者に操作されるアクセルペダルの開度に応じてモータの出力を制御するモータ出力制御手段と、変速指示がなされたとき、複数個の変速段ギヤを切り替える噛み合い式クラッチを有する変速機とを備えた電気自動車の制御装置において、モータ出力制御手段は、変速指示がなされたとき(S12)、噛み合い式クラッチが前記複数個の変速段ギヤを切り替える前に(S20からS26)、モータの出力を零あるいはその近傍からなる所定値に制御する(S18)。
【選択図】図7
Description
VQ=Kp×Δiq+Ki×(∫Δiq・dt)+C2 ・・・式2
上記でKp:比例ゲイン、Ki:積分ゲイン、C1,C2:d,q軸間の干渉成分を除去するためのフィードフォワード項である。
VD=VP×cos(φ+Δφ) ・・・式3
VQ=VP×sin(φ+Δφ) ・・・式4
上記でVP:振幅である。
Claims (5)
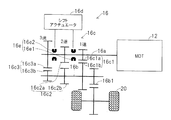
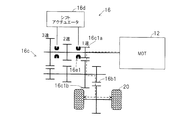
- 車両に搭載されるモータと、少なくとも運転者に操作されるアクセルペダルの開度に応じて前記モータの出力を制御するモータ出力制御手段と、変速指示がなされたとき、前記モータに接続される入力軸と駆動輪に接続される出力軸の間に配置される複数個の変速段ギヤを切り替える噛み合い式クラッチを有する変速機とを備えた電気自動車の制御装置において、前記モータ出力制御手段は、前記変速指示がなされたとき、前記噛み合い式クラッチが前記複数個の変速段ギヤを切り替える前に、前記モータの出力を零あるいはその近傍からなる所定値に制御することを特徴とする電気自動車の制御装置。
- 前記モータ出力制御手段によって前記変速指示がなされたときに前記モータの出力を所定値に制御された後、前記噛合い式クラッチを開放し、前記モータ出力制御手段によって前記入力軸と出力軸の差回転が所定範囲となるように制御された後、前記噛み合い式クラッチを係合することを特徴とする請求項1記載の電気自動車の制御装置。
- 前記モータ出力制御手段は、前記変速指示がなされたとき、前記モータの出力を、前記所定値に前記モータの回転子と前記入力軸のフリクショントルクに相当する値を加算して得た値に制御することを特徴とする請求項1または2記載の電気自動車の制御装置。
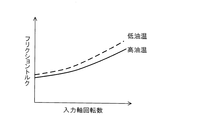
- 前記モータ出力制御手段は、前記フリクショントルクに相当する値を前記変速機の油温と前記入力軸の回転数に基づいて変更することを特徴とする請求項3記載の電気自動車の制御装置。
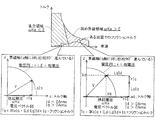
- 前記複数個の変速段ギヤは、前記モータの高速側のノイズピークが前記車両の設定最高車速を超えた領域で発生するように変速比が設定されることを特徴とする請求項1から4のいずれかに記載の電気自動車の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011015572A JP5832094B2 (ja) | 2011-01-27 | 2011-01-27 | 電気自動車の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011015572A JP5832094B2 (ja) | 2011-01-27 | 2011-01-27 | 電気自動車の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012157199A true JP2012157199A (ja) | 2012-08-16 |
| JP5832094B2 JP5832094B2 (ja) | 2015-12-16 |
Family
ID=46838307
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011015572A Active JP5832094B2 (ja) | 2011-01-27 | 2011-01-27 | 電気自動車の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5832094B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014084102A1 (ja) * | 2012-11-29 | 2014-06-05 | ダイムラー・アクチェンゲゼルシャフト | 電気自動車の変速制御装置 |
| JP2015149876A (ja) * | 2014-02-10 | 2015-08-20 | 本田技研工業株式会社 | 電動機器の動力伝達装置 |
| JP2022036845A (ja) * | 2020-08-24 | 2022-03-08 | トヨタ自動車株式会社 | 電動車両の制御装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09205703A (ja) * | 1996-01-26 | 1997-08-05 | Seiko Epson Corp | 電気自動車の駆動装置及びその制御方法 |
| JP2000295709A (ja) * | 1999-04-06 | 2000-10-20 | Toyota Motor Corp | 電気自動車の変速時制御装置 |
| JP2005282741A (ja) * | 2004-03-30 | 2005-10-13 | Mitsubishi Fuso Truck & Bus Corp | ハイブリッド自動車の制御装置 |
| JP2006231977A (ja) * | 2005-02-22 | 2006-09-07 | Toyota Motor Corp | 車両の制御装置および制御方法 |
| JP2010031980A (ja) * | 2008-07-30 | 2010-02-12 | Nissan Motor Co Ltd | 勾配推定装置 |
| JP2012157200A (ja) * | 2011-01-27 | 2012-08-16 | Honda Motor Co Ltd | 電気自動車の制御装置 |
-
2011
- 2011-01-27 JP JP2011015572A patent/JP5832094B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09205703A (ja) * | 1996-01-26 | 1997-08-05 | Seiko Epson Corp | 電気自動車の駆動装置及びその制御方法 |
| JP2000295709A (ja) * | 1999-04-06 | 2000-10-20 | Toyota Motor Corp | 電気自動車の変速時制御装置 |
| JP2005282741A (ja) * | 2004-03-30 | 2005-10-13 | Mitsubishi Fuso Truck & Bus Corp | ハイブリッド自動車の制御装置 |
| JP2006231977A (ja) * | 2005-02-22 | 2006-09-07 | Toyota Motor Corp | 車両の制御装置および制御方法 |
| JP2010031980A (ja) * | 2008-07-30 | 2010-02-12 | Nissan Motor Co Ltd | 勾配推定装置 |
| JP2012157200A (ja) * | 2011-01-27 | 2012-08-16 | Honda Motor Co Ltd | 電気自動車の制御装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014084102A1 (ja) * | 2012-11-29 | 2014-06-05 | ダイムラー・アクチェンゲゼルシャフト | 電気自動車の変速制御装置 |
| JP2014108011A (ja) * | 2012-11-29 | 2014-06-09 | Daimler Ag | 電気自動車の変速制御装置 |
| JP2015149876A (ja) * | 2014-02-10 | 2015-08-20 | 本田技研工業株式会社 | 電動機器の動力伝達装置 |
| JP2022036845A (ja) * | 2020-08-24 | 2022-03-08 | トヨタ自動車株式会社 | 電動車両の制御装置 |
| JP7413957B2 (ja) | 2020-08-24 | 2024-01-16 | トヨタ自動車株式会社 | 電動車両の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5832094B2 (ja) | 2015-12-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3208866B2 (ja) | 電気自動車用駆動装置 | |
| JP3988428B2 (ja) | 自動変速機,制御装置、および自動車 | |
| US7967721B2 (en) | Control apparatus for an automatic transmission | |
| GB2289774A (en) | Drive control system for battery car | |
| JP4720549B2 (ja) | 車両の制御装置 | |
| JP5832094B2 (ja) | 電気自動車の制御装置 | |
| JP6157829B2 (ja) | 電気自動車のロールバック抑制制御装置 | |
| JP3685146B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2012175769A (ja) | 電気自動車 | |
| JP2007181289A (ja) | 4輪駆動車両の制御装置 | |
| JP2012157200A (ja) | 電気自動車の制御装置 | |
| US10471949B2 (en) | Automobile equipped with three-phase motor | |
| JP3807369B2 (ja) | ハイブリッド車両 | |
| JP5570299B2 (ja) | ハイブリッド車両 | |
| JP5359937B2 (ja) | ハイブリッド車両 | |
| JP3746507B2 (ja) | 電気自動車の駆動制御装置 | |
| JP6447154B2 (ja) | 車両の駆動装置 | |
| JP4358149B2 (ja) | ハイブリッド車両の動力伝達装置 | |
| US11186284B2 (en) | Control device | |
| JP3692796B2 (ja) | ハイブリッド車両 | |
| JP4432314B2 (ja) | 車両に搭載されるブレーキ装置 | |
| WO2013081121A1 (ja) | 電動モータ搭載自動車のアクセル操作応答制御方法 | |
| JP5074758B2 (ja) | 車両の制御装置、制御方法、その方法を実現するプログラムおよびそのプログラムを記録した記録媒体、車両用の駆動装置 | |
| JP2009154865A (ja) | 車両に搭載されるブレーキ装置 | |
| JP5394187B2 (ja) | 車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140827 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140827 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150520 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150709 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151006 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151027 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5832094 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |