JP4310858B2 - 野菜収穫機 - Google Patents
野菜収穫機 Download PDFInfo
- Publication number
- JP4310858B2 JP4310858B2 JP21367599A JP21367599A JP4310858B2 JP 4310858 B2 JP4310858 B2 JP 4310858B2 JP 21367599 A JP21367599 A JP 21367599A JP 21367599 A JP21367599 A JP 21367599A JP 4310858 B2 JP4310858 B2 JP 4310858B2
- Authority
- JP
- Japan
- Prior art keywords
- conveyor
- vegetables
- foliage
- processing device
- harvesting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Landscapes
- Harvesting Machines For Root Crops (AREA)
Description
【発明の属する技術分野】
本発明は、野菜収穫機に関するものであって、野菜収穫機の技術分野に属する。
【0002】
【従来の技術】
従来の野菜収穫機は、走行装置を備えた車体上に、左右一対の挾持ベルトによって、圃場に植っている根菜類、例えば、人参や大根を挟持し、走行している車体と回転駆動されている挾持ベルトとの共同作用によって圃場から強制的に引き抜いて収穫する構成の引き抜き式の根菜収穫機や、補助作業者が、圃場から手作業によって収穫した野菜を収穫コンベヤ装置上に載置して車体側に搬送して収集する方式の野菜収穫機や、また、玉ねぎや馬鈴薯等のように土中に成育している野菜を、適宜深さの土中を進行する掘取機によって掘り取りながら収穫する構成の収穫機がある。
【0003】
以上のような従来の野菜収穫機は、補助作業者が同乗する構成のものであっても、作業機部分の操作や走行車体の運転操作は、全て操縦座席から行なう構成であった。
【0004】
【発明が解決しようとする課題】
従来の玉ねぎ収穫機において、収穫コンベヤの後方に接続して設けられている茎葉処理装置aは、図4に示すように、外周面が平滑なローラbと外周面に螺旋を設けた螺旋ローラcとを対向させて構成されていた。したがって、従来の茎葉処理装置aは、両方のローラ外径に差があるために、玉ねぎが一対のローラb、cに挟まれて搬送されるとき、傾斜して円滑な搬送ができずにスリップが起こり、損傷して商品価値を損ない、茎葉のカッティングミスが発生する課題があった。
【0005】
【課題を解決するための手段】
本発明は、上述した課題を解決するために、次の如き技術手段を講ずるものである。
すなわち、走行車体(1)に搭載したエンジン(10)と左右一対のクローラ(15,15’)を駆動する走行ミッション装置(11)とを左右一方側のクローラ(15’)の上方に片寄せて設け、該走行車体(1)の前部に圃場から掘り取った野菜を搬送する収穫コンベヤ(2)を設け、該収穫コンベヤ(2)の後方に収穫野菜の茎葉を処理する茎葉処理装置(3)を設け、該収穫コンベヤ(2)と茎葉処理装置(3)とを左右他方側のクローラ(15)に寄せて設け、該茎葉処理装置(3)の搬送下手側に野菜を上方に搬送する積込みコンベヤ(4)を設け、前記収穫コンベヤ(2)は、圃場から野菜を掘り取る掘取刃(16)を前部低位置に設け、該掘取刃(16)の前側にゲージ輪(20)を軸架し、該ゲージ輪(20)を上下調節する調節ハンドルを設け、前記掘取刃(16)の後方に掘り取られた野菜を拾い上げる第1コンベヤ(17)を設け、該第1コンベヤ(17)の上方に掘り上げられた野菜を掻き込む掻込みコンベヤ(18)を設け、第1コンベヤ(17)の後方に第1コンベヤ(17)から野菜を受け継いで上方に搬送する急傾斜した第2コンベヤ(19)を設けて構成し、前記第2コンベヤ(19)の終端部に収穫コンベヤ(2)から茎葉処理装置(3)に野菜を案内する第1案内板(21)を設け、前記茎葉処理装置(3)は、左ねじの連続した突起を設けた左ねじ螺旋ローラ(3a)と右ねじの連続した突起を設けた右ねじ螺旋ローラ(3b)の始端側を前記収穫コンベヤ(2)の終端部に臨ませると共に終端側を後方に配置して野菜の搬送方向に軸芯を沿わせ、該左ねじ螺旋搬送ローラ(3a)と右ねじ螺旋搬送ローラ(3b)とをばねで張圧して相互に圧接させると共に相互に内側に回転するように軸架して構成し、前記積込みコンベヤ(4)は、駆動チェン(22)に爪状の掻き上げラグ(23)を所定間隔ごとに配置した構成とし、該積込みコンベヤ(4)の搬送始端部を前記茎葉処理装置(3)の終端部に臨ませて縦方向に配置すると共に、終端部を後上方に延長して前記茎葉処理装置(3)から受け継いだ野菜を上方位置まで持ち上げ搬送する構成とし、該積込みコンベヤ(4)の後部に積込みコンベヤ(4)の終端部から落下する野菜をコンテナ(26)に案内する第2案内板(24)と、野菜を積み込むコンテナ(26)を載置する上下昇降自在且つ傾斜調節可能に構成したリフト装置(25)を設け、該リフト装置(25)を上下方向の支持部材(27)に設けた油圧機構によって昇降自在に構成し、該リフト装置(25)に野菜の供給量に応じて伸縮して揺動アームを介してリフト装置(25)の傾斜を調節するアクチュエーター(28)を設け、前記収穫コンベヤ(2)の後部側方位置に、該収穫コンベヤ(2)の始端部から終端部に至る搬送経路上を監視でき且つ茎葉処理装置(3)上が視界に入る高さに構成した操縦座席(29)を設け、該操縦座席(29)の後方位置で且つ茎葉処理装置(3)の側方に野菜の監視及び選別を行う補助作業者が搭乗するステップ(30)を設け、前記リフト装置(25)のアクチュエーター(28)を操作して傾斜調節を行う傾斜調節用のレバーと、該リフト装置(25)の上下調節を行う上下調節用のレバーと、前記茎葉処理装置(3)の正逆転を切り換える正逆転切換えレバーとを前記ステップ(30)の前側にまとめて設け、前記リフト装置(25)の傾斜調節と上下調節を、操縦座席(29)に座った運転者とステップ(30)に搭乗した補助作業者との両者が操作できる構成としたことを特徴とする野菜収穫機とした。
【0006】
【発明の効果】
請求項1記載の発明は、左ねじ螺旋ローラ(3a)と右ねじ螺旋ローラ(3b)の始端側を収穫コンベヤ(2)の終端部に臨ませると共に終端側を後方に配置して野菜の搬送方向に軸芯を沿わせ、左ねじ螺旋搬送ローラ(3a)と右ねじ螺旋搬送ローラ(3b)とをばねで張圧して相互に圧接させると共に相互に内側に回転するように軸架して茎葉処理装置(3)を構成したことによって、野菜に捻転方向の異なる左ねじ螺旋ローラ(3a)と右ねじ螺旋ローラ(3b)とによって左右両側から交互に後方への搬送力が与えられるため、野菜は左ねじ螺旋ローラ(3a)と右ねじ螺旋ローラ(3b)との中心位置をスリップすることなく円滑に搬送することができるので、野菜が損傷することを防止でき、商品価値が向上する。
また、野菜をスリップすることなく円滑に搬送できることによって、左ねじ螺旋ローラ(3a)と右ねじ螺旋ローラ(3b)とに設けた連続した突起が搬送中の野菜の茎葉部分を回転方向に引き込んで挟んで押し当てて確実に切断することができる。
そして、積込みコンベヤ(4)の終端部の案内板(24)からコンテナ(26)に落下する野菜の供給量に応じて上下昇降自在且つ傾斜調節可能に構成したリフト装置(25)の傾斜を調節するアクチュエーター(28)を設けたことによって、リフト装置(25)を上下調節すると共に、アクチュエーター(28)を操作してコンテナ(26)が適宜傾くようにリフト装置(25)を傾斜させて野菜の受け入れ姿勢を調節することができるので、落下の衝撃で野菜が損傷することを防止され、野菜の商品価値を維持する効果がある。
さらに、収穫コンベヤ(2)の後部側方位置に設けた運転者が座る操縦座席(29)から、収穫コンベヤ(2)の始端部から終端部に至る搬送経路上を監視でき且つ茎葉処理装置(3)上を視界に入れることができる。
また、操縦座席(29)の後方位置で且つ茎葉処理装置(3)の側方に野菜の監視及び選別を行う補助作業者が搭乗するステップ(30)を設けたことによって、補助作業者はステップ(30)上に立って腐敗した野菜や極端に発育不良である野菜をより分けて取り除くことができると共に、コンテナ(26)の内部に供給される野菜の状況を見ながらアクチュエーター(28)を操作してコンテナ(26)の傾斜状態を供給量に応じて適宜修正することによって、野菜が傷付くことを防止しながらコンテナ(26)に充填することができる。
さらに、リフト装置(25)のアクチュエーター(28)を操作して傾斜調節を行う傾斜調節用のレバーと、該リフト装置(25)の上下調節を行う上下調節用のレバーと、前記茎葉処理装置(3)の正逆転を切り換える正逆転切換えレバーとをステップ(30)の前側にまとめて設けたことによって、リフト装置(25)の傾斜調節と上下調節を、操縦座席(29)に座った運転者とステップ(30)に搭乗した補助作業車の両者が操作できる。
【0007】
【発明の実施の形態】
以下、本発明の実施の形態を説明する。走行車体1は、図7の概略図に示すように、搭載したエンジン10から走行ミッション装置11に入力し、走行ミッション装置11から左右両側に延長した中間軸12、12’の端部に中間伝動装置13、13’を設けてホイルシャフト14、14’を伝動し、左右一対のクローラ15、15’を駆動する構成としている。そして、前記エンジン10と前記走行ミッション装置11は、図7に示すように、一方側のクローラ15’の上方に片寄せて設け、後述する収穫コンベヤ2や茎葉処理装置3等を他方側のクローラ15側に寄せて構成している。
【0008】
そして、走行ミッション装置11は、従来から公知の変速装置や副変速装置、サイドクラッチやサイドブレーキ等を内装して構成している。つぎに、収穫コンベヤ2は、図8に示すように、前部低位置に地中の玉ねぎを掘り取る掘取刃16を設け、その後方に第1コンベヤ17とその上側に掻込みコンベヤ18を装備し、それに接続して玉ねぎを上方に搬送する急傾斜に巻回した第2コンベヤ19を設けて構成している。なお、ゲージ輪20は、前記掘取刃16の前側に軸架し、調節ハンドルにより上下調節自由に軸架している。
【0009】
つぎに、茎葉処理装置3は、図1乃至図3に示すように、表面に左ねじの連続した突起を設けた左ねじ螺旋ローラ3aと、表面に右ねじの連続した突起を設けた右ねじ螺旋ローラ3bとを一組として、複数組を玉ねぎの搬送方向に軸心を沿わせて、しかも、相互に内側に向かって回転するように軸架して設け、始端側を前記収穫コンベヤ2の終端部(図8参照)に臨ませ、終端側を後方に位置して設けている。
【0010】
そして、上記一組のローラ3a、3bは、相互に圧接できるようにばねで張圧している。なお、図8に示す案内板21(第1案内板)は、玉ねぎを収穫コンベヤ2の終端部から茎葉処理装置3に案内して供給する構成としている。そして、茎葉処理装置3は、図1乃至図3に示すように、始端部に供給された玉ねぎを、左ねじ螺旋ローラ3aと右ねじ螺旋ローラ3bとが表面の螺旋状に連続した突起によって回転方向に引込みながら茎葉部分を下側に引き出して双方で挟んで押し当てて強制的に切断して、茎葉を分離して下方に排出しながら、果肉部を後方へ搬送する構成としている。
【0011】
つぎに、積込みコンベヤ4は、図9に示すように、駆動チエン22に爪状の掻き上げラグ23を所定間隔ごとに配置して設け、縦方向に設けて搬送始端部を前記茎葉処理装置3の終端部に臨ませ、終端部を後方上方に延長して構成している。そして、積込みコンベヤ4は、前記茎葉処理装置3から受け継いだ玉ねぎを上方の高い位置まで持ち上げ搬送して、後側の案内板24(第2案内板)上に落下して後方のリフト装置25に載置しているコンテナ26に供給する構成としている。
【0012】
つぎに、リフト装置25は、上下方向の支持部材27に設けている油圧機構によって上下昇降自由に構成し、更に、傾斜用のアクチュエーター(油圧シリンダ)28を伸縮して揺動アームを介して傾斜調節ができるように構成している。つぎに、操縦座席29は、図5に示すように、収穫コンベヤ2の後部の側方位置に配置して設け、上述した収穫コンベヤ2の始端部分から終端部分に至る搬送経路上を監視でき、更に、後方の茎葉処理装置3上が視界に入る高さに構成し、右前方にパワステアリングレバー(サイドクラッチの断続操作とサイドブレーキの制動操作を行なう)を設けて構成している。
【0013】
そして、ステップ30は、図5に示すように、前記操縦座席29の後方位置で、茎葉処理装置3の側方に設け、その茎葉処理装置3に供給されてくる玉ねぎの不良品を選別分離する補助作業者が乗る場所に構成している。そして、各種の操作レバーは、図5に示すように、操縦座席29の左側の背後で、前記ステップ6の前方位置にまとめて設けている。そして、これらの各操作レバーは、リフト装置25のアクチュエーター28を操作して傾斜調節をするレバーと、リフト装置25の上下調節を行なうレバーと、収穫コンベヤ2を駆動する油圧モータの操作レバーと、茎葉処理装置3の油圧モータの正逆転切換えレバー等を配置して構成されている。
【0014】
つぎにその作用について述べる。まず、野菜収穫機の作業開始にあたり、収穫コンベヤ2の前側にある掘取刃16の高さを、調節ハンドルの操作によりゲージ輪20を上下調節して設定し、地中にある玉ねぎの掘り取りに適する高さを決める。そして、運転者は、操縦座席29に座り、補助作業者は、ステップ30上に立って作業準備を完了する。つぎに、野菜収穫機は、エンジン10を始動して機体の回転各部を駆動しながら、圃場内を前進させると、クローラ15、15’が通常の場合、溝内を走行して車体1を前進して収穫作業を開始する。
【0015】
すると、掘取刃16は、図8に示すように、地中を進行しながら玉ねぎの下側に入り、掘り上げながら第1コンベヤ17上に拾い上げる。そのとき、掻込みコンベヤ18は、上側にあって、掘り上げられた玉ねぎに対して掻き込み作用をし、更に、土の塊を砕きながら排出する。このようにして、玉ねぎは、図8に示すように、第1コンベヤ17の終端部から第2コンベヤ19に受け継がれ、更に、上方に向かって搬送されるが、その受け継ぎ時に、第1コンベヤ17上の土が下方に放棄される。そして、玉ねぎは、第2コンベヤ19に保持されて高い位置まで搬送されながら持ち上げられてその終端部分から案内板21を介して茎葉処理装置3の始端部に供給される。
【0016】
そして、玉ねぎは、互いに内側に向かって回転している左ねじ螺旋ローラ3aと右ねじ螺旋ローラ3bとの一組のローラによって後方に送られる過程で、茎葉部が、突起状の螺旋により回転方向に引き込まれて下側に垂下状に達し、図2に示すように、強制的に切断されて分離される。このような工程において、玉ねぎは、捻転方向の異なる左ねじと右ねじとの螺旋によって左右両側から交互に後方への搬送力が与えられ、両方のローラ3a、3bの中心位置を搬送されスリップすることなく円滑に送られる。そのため、玉ねぎは、損傷を受けることがほとんどなく商品価値を損なうことが極めて少なくなる。
【0017】
そして、補助作業者は、上記の茎葉処理工程において、ステップ30上に立って玉ねぎを監視しながら、腐敗したもの、極端に発育不良のものなどを選り分けて取り除いている。そのとき、補助作業者は、必要に応じて前側に配置している操作レバーを操作することもできる。そして、補助作業者は、後部のコンテナ26の受入れ準備も、操作レバーを使って行い、リフト装置25を上下調節し、更に、アクチュエーター28を操作してコンテナ26が適宜傾くように、リフト装置25を傾斜して玉ねぎを受け入れ姿勢に調節するのである。
【0018】
なお、上記したリフト装置25の調節操作は、補助作業者と運転者の両方からできる。そして、玉ねぎは、前述のようにして茎葉部が切断されて下方に排出され、果肉部が茎葉処理装置3の終端部分に達して、積込みコンベヤ4の搬送始端部に供給される。そのとき、玉ねぎは、図9に示すように、茎葉処理装置3から案内板を経て掻き上げラグ23に受け継がれて、上方に回動している駆動チエン22によってそのまま上方に搬送される。そして、玉ねぎは、積込みコンベヤ4の終端部から案内板24を経てコンテナ26に供給される。そして、コンテナ26は、玉ねぎの供給作業中には、補助作業者が内部の状況を見ながら、操作レバーによってアクチュエーター28を操作して、傾斜状態を供給量に応じて修正しながら極力損傷を少なくしながら充填する。
【0019】
そして、リフト装置25は、コンテナ26が満杯に達して、玉ねぎの充填が完了すると、操作レバーを操作してコンテナ26を圃場に載置してつぎの作業に移るものである。
【図面の簡単な説明】
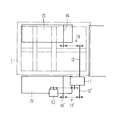
【図1】 本発明の一実施例であって、平面図である。
【図2】 本発明の一実施例であって、正面図である。
【図3】 本発明の一実施例であって、作用を示す正断面図である。
【図4】 説明用の従来型の作用図である。
【図5】 本発明の一実施例であって、平面図である。
【図6】 本発明の一実施例であって、側面図である。
【図7】 本発明の一実施例であって、伝動機構の概略平面図である。
【図8】 本発明の一実施例であって、側面図である。
【図9】 本発明の一実施例であって、側面図である。
【符号の説明】
1 走行車体
2 収穫コンベヤ
3 茎葉処理装置
3a 左ねじ螺旋ローラ
3b 右ねじ螺旋ローラ
4 積込みコンベヤ
10 エンジン
11 走行ミッション装置
15 クローラ
15’ クローラ
16 掘取刃
17 第1コンベヤ
19 第2コンベヤ
20 ゲージ輪
21 案内板(第1案内板)
22 駆動チェン
23 掻き上げラグ
24 案内板(第2案内板)
25 リフト装置
26 コンテナ
27 支持部材
28 アクチュエーター
29 操縦座席
30 ステップ
Claims (1)
- 走行車体(1)に搭載したエンジン(10)と左右一対のクローラ(15,15’)を駆動する走行ミッション装置(11)とを左右一方側のクローラ(15’)の上方に片寄せて設け、該走行車体(1)の前部に圃場から掘り取った野菜を搬送する収穫コンベヤ(2)を設け、該収穫コンベヤ(2)の後方に収穫野菜の茎葉を処理する茎葉処理装置(3)を設け、該収穫コンベヤ(2)と茎葉処理装置(3)とを左右他方側のクローラ(15)に寄せて設け、該茎葉処理装置(3)の搬送下手側に野菜を上方に搬送する積込みコンベヤ(4)を設け、前記収穫コンベヤ(2)は、圃場から野菜を掘り取る掘取刃(16)を前部低位置に設け、該掘取刃(16)の前側にゲージ輪(20)を軸架し、該ゲージ輪(20)を上下調節する調節ハンドルを設け、前記掘取刃(16)の後方に掘り取られた野菜を拾い上げる第1コンベヤ(17)を設け、該第1コンベヤ(17)の上方に掘り上げられた野菜を掻き込む掻込みコンベヤ(18)を設け、第1コンベヤ(17)の後方に第1コンベヤ(17)から野菜を受け継いで上方に搬送する急傾斜した第2コンベヤ(19)を設けて構成し、前記第2コンベヤ(19)の終端部に収穫コンベヤ(2)から茎葉処理装置(3)に野菜を案内する第1案内板(21)を設け、前記茎葉処理装置(3)は、左ねじの連続した突起を設けた左ねじ螺旋ローラ(3a)と右ねじの連続した突起を設けた右ねじ螺旋ローラ(3b)の始端側を前記収穫コンベヤ(2)の終端部に臨ませると共に終端側を後方に配置して野菜の搬送方向に軸芯を沿わせ、該左ねじ螺旋搬送ローラ(3a)と右ねじ螺旋搬送ローラ(3b)とをばねで張圧して相互に圧接させると共に相互に内側に回転するように軸架して構成し、前記積込みコンベヤ(4)は、駆動チェン(22)に爪状の掻き上げラグ(23)を所定間隔ごとに配置した構成とし、該積込みコンベヤ(4)の搬送始端部を前記茎葉処理装置(3)の終端部に臨ませて縦方向に配置すると共に、終端部を後上方に延長して前記茎葉処理装置(3)から受け継いだ野菜を上方位置まで持ち上げ搬送する構成とし、該積込みコンベヤ(4)の後部に積込みコンベヤ(4)の終端部から落下する野菜をコンテナ(26)に案内する第2案内板(24)と、野菜を積み込むコンテナ(26)を載置する上下昇降自在且つ傾斜調節可能に構成したリフト装置(25)を設け、該リフト装置(25)を上下方向の支持部材(27)に設けた油圧機構によって昇降自在に構成し、該リフト装置(25)に野菜の供給量に応じて伸縮して揺動アームを介してリフト装置(25)の傾斜を調節するアクチュエーター(28)を設け、前記収穫コンベヤ(2)の後部側方位置に、該収穫コンベヤ(2)の始端部から終端部に至る搬送経路上を監視でき且つ茎葉処理装置(3)上が視界に入る高さに構成した操縦座席(29)を設け、該操縦座席(29)の後方位置で且つ茎葉処理装置(3)の側方に野菜の監視及び選別を行う補助作業者が搭乗するステップ(30)を設け、前記リフト装置(25)のアクチュエーター(28)を操作して傾斜調節を行う傾斜調節用のレバーと、該リフト装置(25)の上下調節を行う上下調節用のレバーと、前記茎葉処理装置(3)の正逆転を切り換える正逆転切換えレバーとを前記ステップ(30)の前側にまとめて設け、前記リフト装置(25)の傾斜調節と上下調節を、操縦座席(29)に座った運転者とステップ(30)に搭乗した補助作業者との両者が操作できる構成としたことを特徴とする野菜収穫機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP21367599A JP4310858B2 (ja) | 1999-07-28 | 1999-07-28 | 野菜収穫機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP21367599A JP4310858B2 (ja) | 1999-07-28 | 1999-07-28 | 野菜収穫機 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2001037311A JP2001037311A (ja) | 2001-02-13 |
| JP2001037311A5 JP2001037311A5 (ja) | 2008-03-21 |
| JP4310858B2 true JP4310858B2 (ja) | 2009-08-12 |
Family
ID=16643119
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP21367599A Expired - Fee Related JP4310858B2 (ja) | 1999-07-28 | 1999-07-28 | 野菜収穫機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4310858B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR200468882Y1 (ko) | 2011-07-29 | 2013-09-06 | 이재용 | 땅속작물 수확기 |
| KR101744949B1 (ko) * | 2015-10-21 | 2017-06-09 | (주)에스엔피시스템 | 양파 줄기 절단 장치 |
| CN108813677B (zh) * | 2018-05-28 | 2021-04-06 | 邹钰 | 一种绿色蔬菜加工摘叶处理设备 |
| CN108783530B (zh) * | 2018-05-28 | 2021-03-26 | 李柯槿 | 一种蔬菜自动化加工装置 |
| CN108741164B (zh) * | 2018-05-28 | 2021-04-27 | 邹钰 | 一种绿色蔬菜加工自动化处理设备 |
| CN108741165B (zh) * | 2018-05-28 | 2021-03-30 | 邹钰 | 一种蔬菜自动化加工设备 |
| CN108669599B (zh) * | 2018-05-28 | 2021-04-06 | 邹钰 | 一种绿色蔬菜加工自动化摘叶处理设备 |
| CN108783529B (zh) * | 2018-05-28 | 2021-04-27 | 邹钰 | 一种蔬菜自动化加工叶片摘除设备 |
-
1999
- 1999-07-28 JP JP21367599A patent/JP4310858B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001037311A (ja) | 2001-02-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4310858B2 (ja) | 野菜収穫機 | |
| JP2001037311A5 (ja) | ||
| JP2005176784A (ja) | ねぎ搬送装置 | |
| US3456429A (en) | Sugarcane harvesting apparatus | |
| JP5321019B2 (ja) | 根菜類収穫機 | |
| JP4337219B2 (ja) | 野菜収穫機 | |
| JP4193656B2 (ja) | 農作物収穫作業機 | |
| US2430665A (en) | Beet harvester with topper | |
| JP3959867B2 (ja) | 野菜収穫機 | |
| JP2003116320A (ja) | 豆類収穫機 | |
| JP4389053B2 (ja) | 根菜収穫機 | |
| JP3662726B2 (ja) | 自走式根菜収穫機 | |
| JP3547362B2 (ja) | 根菜類収穫機の葉部除去装置 | |
| JP4403852B2 (ja) | 農作物収穫機 | |
| JP3334832B2 (ja) | 農産物収穫機 | |
| JP3457713B2 (ja) | コンバイン | |
| JP3172979B2 (ja) | 農産物収穫機 | |
| JP4569254B2 (ja) | 農作物収穫機 | |
| JP3710056B2 (ja) | 収穫機 | |
| JP3778053B2 (ja) | 収穫機 | |
| KR20230155648A (ko) | 가변구조로 이루어지는 동력전달부를 구비한 다목적 수확기용 간격조절장치 | |
| JP4626080B2 (ja) | 収穫機 | |
| JP3513459B2 (ja) | 根菜類収穫機 | |
| JP2005034103A (ja) | 根菜収穫機 | |
| JP2002325509A (ja) | 根菜類の収穫機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060725 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080110 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080205 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080401 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080902 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081031 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090421 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090504 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120522 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150522 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |