JP4139131B2 - 超音波モータの駆動回路 - Google Patents
超音波モータの駆動回路 Download PDFInfo
- Publication number
- JP4139131B2 JP4139131B2 JP2002129095A JP2002129095A JP4139131B2 JP 4139131 B2 JP4139131 B2 JP 4139131B2 JP 2002129095 A JP2002129095 A JP 2002129095A JP 2002129095 A JP2002129095 A JP 2002129095A JP 4139131 B2 JP4139131 B2 JP 4139131B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- piezoelectric element
- unit
- drive signal
- ultrasonic motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Description
【発明の属する技術分野】
本発明は、電気−機械エネルギー変換素子を用いた超音波モータの駆動回路に関するものである。
【0002】
【従来の技術】
従来、電気−機械エネルギー変換素子を用いた超音波モータが種々提案がなされ、これに伴い前記超音波モータの駆動回路においても動作性能向上化等に鑑み、数多く提案がなされている。
【0003】
この種の関連技術としては、本件出願人により提案がなされた特開平7−46867号公報に記載の超音波振動子の駆動装置があり、また超音波リニアモータ及び製造方法としては特許第3173902号公報によって開示がなされている。
【0004】
図12は特開平7−46867号公報に記載の超音波振動子の駆動装置の構成を示すブロック図である。
【0005】
上記提案の超音波振動子の駆動装置は、定在波型超音波モータの駆動回路として構成されたもので、図12に示すように、圧電素子106,107を駆動源として超音波振動子105に振動を励起し、該振動エネルギーにより被駆動部材を駆動する超音波振動子の駆動装置において、前記超音波振動子105に伝播させる音波を発生するパルス発生器110,音波発生電圧素子108,前記超音波振動子中に伝播した音波を受信する音波受信圧電素子109と、前記パルス発生器110と同期する基準波と音波受信圧電素子109の出力との位相を比較する位相比較手段(EX−OR素子114)と、この位相比較手段の出力により圧電素子106,107に印加する駆動電圧の周波数を決定する周波数決定手段(電圧制御発信器101,移相器102)とを具備して構成される。
【0006】
具体的には、上記超音波振動子の駆動装置は、周波数決定手段としての電圧制御発振器(VCO)101と、この出力に対し±90度の位相差をもたせる移相器(P/S)102とで超音波振動子駆動用の交番電圧を発生させるようになっており、それぞれの出力が電力増幅器103,104で電力増幅され、超音波振動子5に配設された2個の圧電素子106,107に接続されて供給されるようになっている。
【0007】
超音波振動子105の一側面には、音波発生用の音波発生圧電素子108が接着固定されている。この音波発生圧電素子108には、スタート信号(START)に同期する高周波パルスを発生・出力するパルス発生器(P/G)110の出力端が接続されている。この圧電素子108は、高周波パルス信号が印加されると変位し、音波を発生するようになっており、発生した音波は超音波振動子105を伝播するようになっている。
【0008】
一方、超音波振動子105の他側面には、音波を受信する音波受信圧電素子109が接着固定され、該音波受信圧電素子109は、音波発生圧電素子108の変位により発生し超音波振動子105を伝播する音波を受けるようになっている。この音波受信圧電素子109には、インダクタ111とコンパレータ112,AND素子113,EX−OR素子114を介して積分器115が接続されている。また前記EX−OR素子114の他方には、図示しない前記スタート信号と同期する基準波形信号(SDT)が入力されるようになっている。
【0009】
上記構成の超音波振動子の駆動装置による駆動方法は、音波発生手段(パルス発生器110,音波発生圧電素子108)で超音波振動子105に伝播させる伝播波を発生し、超音波振動子105を伝播した伝播波を音波受信手段である音波受信圧電素子109で受信する。
【0010】
そして、EX−OR素子114の位相比較手段で、音波発生手段であるパルス発生器110と同期する基準波(STD)と音波受信手段である音波受信圧電素子109との位相を比較する。すなわち、この位相比較結果であるこの位相差を超音波振動子105の最適な駆動状態の値になるように、周波数決定手段である電圧制御発振器101を用いて、前記電気−機械エネルギー変換素子(圧電素子106,107)に印加する駆動電圧の周波数を決定するように制御していた。
【0011】
また、前記特許第3173902号公報によって開示されている超音波リニアモータが図13に示されている。
【0012】
図13は上記提案による超音波リニアモータに搭載された超音波振動子を示す正面図である。
【0013】
図13に示すように、この提案による超音波リニアモータに搭載される超音波振動子200は、駆動体として2つの積層型圧電素子213と、弾性体としての基本弾性体211及び該基本弾性体211に対して接合された保持用弾性体212とを備え、各々の積層型圧電素子213の両端部が保持用弾性体212に対しつき当てて接合保持された構成となっている。
【0014】
また、前記基本弾性体211における弾性波の節線と直交する面または弾性波の進行する方向を含む面に、該基本弾性体の縦振動と屈曲振動をとを独立に検出するための検出用圧電素子217.218が接合されている。これらの検出用圧電素子217,218は、厚み方向に前面に分極され、または厚み方向に対してその向きが交互に分極されるように接合されている。
【0015】
上記構成の超音波振動子200の共振周波数を積層型圧電素子213に印加し、さらに2つの積層型圧電素子213の位相差を90度にすると、超音波振動子200の摺動面に超音波楕円振動が励起されることになる。
【0016】
しかし、この超音波振動子200は、長時間使用すると、共振周波数が変化する。このため、最適な駆動状態を維持するために、検出用圧電素子217,218を用いて縦振動と屈曲振動をそれぞれ検出し、積層型圧電素子213に印加した波形との位相差を常に一定になるように制御している。また、縦振動を検出する検出用圧電素子217の振幅の最大値になるように発振周波数を調整している。
【0017】
【発明が解決しようとする課題】
しかしながら、上述した特開平7−46867号公報に開示されている超音波モータの駆動回路は、音波を発生させる圧電素子及び受信用圧電素子が必要となるため、小型化の要求がある超音波振動子にこれらの圧電素子を設けることは、不利であり望ましくない。また、音波用駆動回路も必要となる。そのため、超音波リニアモータの小型化,低価格化を考慮すると、実用的ではないといった問題点があった。
【0018】
また、上述の特許第3173902号公報に開示されている超音波モータは、追尾手段として、縦振動用と屈曲振動用の2つの検出用圧電素子を設けた構成について述べられている。そして、超音波振動子の駆動方法としては、これら検出用圧電素子からの信号と2つの積層型圧電素子に印加した信号とを位相比較を行い、位相差を常に一定になるように制御している。しかし、検出用圧電素子から出力される屈曲振動及び縦振動の検出信号と、印加した信号とを位相比較して駆動電圧の周波数を決定しても十分な推力が得られていないことが実験で分かり、改良する必要があった。
【0019】
そこで、本発明は上記問題点に鑑みてなされたもので、駆動回路の構成が複雑になることなく、所望の状態で駆動でき且つ電気−機械変換効率を最大に保つことができる超音波モータの駆動回路を提供することを目的とする。
【0020】
【課題を解決するための手段】
上記目的を達成するために、請求項1の発明の超音波モータの駆動回路は、駆動方向に直列に配置された2つの積層型圧電素子と、前記積層型圧電素子を保持すると共に振動体として作用する弾性体と、駆動子と、振動検出用圧電素子と、前記駆動子と接触する被駆動体とを有し、縦共振振動と屈曲共振振動を同時に励起して前記駆動子に楕円振動を発生させて前記被駆動体を駆動させる超音波モータの駆動回路であって、前記超音波モータの駆動回路は、前記2つの積層型圧電素子に印加する90度位相のずれた駆動信号を生成し、前記超音波振動子の共振周波数を中心に所定の幅で駆動信号の周波数を変化することのできる駆動信号生成部と、前記振動検出用圧電素子の検出信号と、前記被駆動体の進行方向前側に配置された積層型圧電素子に印加する駆動信号との位相差が所定の範囲内になるように前記駆動信号生成部を制御する制御手段と、を具備したことを特徴とするものである。
【0021】
請求項2に記載の超音波モータの駆動回路は、請求項1に記載の超音波モータの駆動回路において、前記駆動信号生成部は、前記駆動信号を発振するもので、前記超音波振動子の共振周波数を中心に所定の幅で前記駆動信号の周波数を変化することのできるパルス作成部と、前記パルス作成部の出力を移相して90度位相のずれた少なくとも2つの矩形波信号を出力し、且つディユーティ比が約50%となるように処理を施す波形整形部と、前記波形整形部からの出力の高調波成分を除去する除去機能を具備したフィルタ部と、前記フィルタ部によるフィルタ処理後の信号を入力して増幅し、交流番圧の前記駆動信号を発生させて前記積層型圧電素子に印加する電力増幅部と、前記振動検出用圧電素子により検出された検出信号を2値化して前記制御手段に供給する2値化部と、を具備して構成したことを特徴とするものである。
【0022】
請求項3に記載の超音波モータの駆動回路は、請求項2に記載の超音波モータの駆動回路において、前記制御手段は、前記2値化部からの検出信号と前記被駆動体の進行方向前側に配置された積層型圧電素子に印加する駆動信号との比較を行い、比較結果に基づき前記検出信号と前記駆動信号との位相差が所定の範囲内になるように前記パルス作成部による発信周波数を可変制御することを特徴とするものである。
【0023】
請求項4に記載の超音波モータの駆動回路は、請求項2に記載の超音波モータの駆動回路において、前記電力増幅部は、前記積層型圧電素子に電荷の充電と放電をそれぞれ行うことで増幅して交流番圧の駆動信号を発生させる2つのスイッチング素子で構成され、前記波形整形部は、前記2つのスイッチング素子が同時に駆動しないように波形を整形する回路を具備したことを特徴とするものである。
【0024】
請求項5に記載の超音波モータの駆動回路は、請求項1乃至請求項4のいずれか1つに記載の超音波モータの駆動回路において、前記振動検出用圧電素子は、前記超音波振動子の縦共振振動を検出した検出信号を出力することを特徴とするものである。
【0025】
【発明の実施の形態】
以下、発明の実施の形態について図面を参照して説明する。
図1乃至図4は本発明の超音波モータの駆動回路の第1の実施の形態を示し、図1は本実施の形態における超音波モータの駆動回路の構成を示すブロック図、図2は図1に示す駆動回路の詳細な回路構成を示す回路図、図3は図2中の各回路の出力波形を示すタイミングチャート、図4は本駆動回路による補正動作を説明するための説明図である。
【0026】
本実施の形態の超音波モータの駆動回路は、図1に示すように、パルス作成部1,移相器2,波形整形部3,フィルタ部4,電力増幅部5,超音波振動子6,2つの積層型圧電素子6a,6b,振動検出用圧電素子7及び2値化部8で主に構成されている。
【0027】
なお、本発明の駆動回路によって駆動される超音波リニアモータは、上記超音波駆動子6を備え、該超音波駆動子6は主に弾性体で構成される。この弾性体には駆動方向に直列に前記2つの積層型圧電素子6a,6bが配置される。また弾性体はこれら2つの積層型圧電素子6a,6bを保持すると共に振動体として作用するようになっている。さらに、超音波振動子6の摺動面の所定位置には図示しない駆動子が複数設けられており、この駆動子が図示しない被駆動子と接触するように構成されている。すなわち、後述する本発明の駆動回路によって2つの積層型圧電素子6a,6bに駆動信号が印加されることにより、縦共振振動と屈曲共振振動を同時に励起して前記駆動子に楕円振動を発生させて前記被駆動体が駆動する超音波モータである。
【0028】
さらに、駆動回路の詳細な構成を説明すると、超音波振動子6の共振周波数近傍の駆動信号で発振するパルス作成部1は、発振周波数の可変可能な発振器であり、周波数φ00の信号(以下、φ00信号と称す)及び周波数φ01の信号(以下、φ01信号と称す)を発生して移相器2と波形整形部3に出力する。この場合のφ00信号は、基準となる信号であり、φ01信号は前記φ00信号よりも位相が180度遅れた基準信号である(図3(a),図3(b)参照)。
【0029】
移相器2は、供給されたφ00信号,φ01信号を方向指令に伴った90度あるいは、−90度ずれた信号を作成して、φ02信号及びφ03信号を得て、波形整形部3に出力する。
【0030】
波形整形部3は、入力された信号に対し、超音波モータのモータ効率をあげるためディユーティ比が約50%になるように調整する波形整形処理を施す。すなわち、波形整形部3は、φ00信号が矩形波信号に波形整形されたφ10信号と、該φ10信号に対しディユーティ比が50%であるφ02信号とを生成し、フィルタ部4に出力する。
【0031】
フィルタ部4は、供給された矩形波信号の高調波成分を除去し、得られた2種類の正弦波信号(φ30信号,φ31信号と、φ32信号,φ33信号であり、図3((e),図3(f)参照)を電力増幅部5に出力する。
【0032】
電力増幅部5は、それぞれ供給された信号を所定の増幅率で増幅し、超音波駆動子6に設けられた積層型圧電素子6a,6bに印加する。
【0033】
一方、超音波振動子6に設けられた振動検出用圧電素子7(以下、モニタ電極と称す)は、該超音波振動子6の縦振動を検出するもので、検出結果を2値化部8に出力する。
【0034】
これを受け、2値化部8は、検出結果であるアナログ信号をデジタル信号に変換し、変換したデジタル信号を前記パルス作成部1に供給する。すなわち、振動検出用圧電素子7からのモニタ電極がパルス作成部1にフィードバックされ、該パルス作成部1はこの供給された検出結果に応じて積層型圧電素子6a,6bに与える駆動信号の補正を行っている。
【0035】
次に、図1に示すブロック図の具体的な回路構成を図2を参照しながら詳細に説明する。なお、図2は、図中の上段に示す各ブロックの符号に対応する回路群が示されている。
【0036】
図2に示すように、図1に示すパルス作成部1(符号9に相当)及び移相器2(符号10に相当)は、本駆動回路の制御手段としてのCPU21内に含まれて構成される。
【0037】
また、波形形整形部3は、Dラッチ型フリップフロップを用いて構成されたもので、2つのDフリップフロップ回路(以下、D−FFと称す)11を備えて構成される。なお、これらD−FF11は、図2に示すように、入力端子D,リセット端子R,クロック入力端子CLK,正論理の出力端子Qをそれぞれ有して構成されており、これらの入出力端子を介して図1で説明した信号の入出力が実行される。
【0038】
フィルタ部4は、CRフィルタにて構成され、具体的には2つのコンデンサCと2つの抵抗RとでCRフィルタを構成し、4系統のCRフィルタを備えている。
【0039】
また、電力増幅部5は、FET(MOS型トランジスタ)を用いて構成され、前記フィルタ部4の各出力に対応して4つのFET16,17(16,17)を設けて、各積層型圧電素子6a,6bに印加する駆動信号を増幅する。
【0040】
超音波振動子18(符号6に相当)の共振周波数近傍で発振する駆動信号は、CPU21内のパルス作成部9(符号1に相当)と位相部10(符号2に相当)にて作成される。この場合、パルス作成部9は、モニタ電極19(符号7に相当)からの検出信号に応じて、駆動信号の周波数を共振周波数近傍において可変することができるように構成されている。この周波数可変制御については、該CPU21内に記憶されたプログラムにて実行されるようになっている。
【0041】
一方、位相部10(符号2に相当)は、信号φ00及び信号φ01を、90度、あるいは−90度ずれた各駆動信号(φ02信号,φ03信号)を発生する。これは、被駆動体の動作方向を左右に切替えるものである。この場合、図示はしないが外部スイッチや他のパソコンなどからのON/OFF信号をCPU21の入力ポートから読み取り、CPU21は、入力されたON/OFF信号に基づき、90度あるいは、−90度の出力を決定して、図示しない被駆動体の動作方向を制御している。
【0042】
次に、上記構成の駆動回路による動作を図3及び図4を参照しながら詳細に説明する。
【0043】
CPU21内のパルス作成部9において作成されるφ00信号, φ01信号は、図3(a),図3(b)に示すように、180度位相がずれたもので、図2に示すように波形整形部3のD−FF11及び位相部10に供給される。なお、図3において、φ02信号,φ03信号は、φ00信号,φ01信号の位相が90度あるいは−90度ずれた信号であり、φ00信号, φ01信号と同一なので省略している。
【0044】
φ00信号, φ01信号は、D-FF11に入力されるが、この場合、φ00信号についてはCLK端子に供給し、φ01信号についてはリセット端子に供給する。なお、プリセット端子及びD端子は、図示しない外部スイッチによりHレベルとなるように制御される。
【0045】
また、一方のD−FF11にも同様に位相部10からのφ02信号,φ03信号が同様に供給されて波形処理が実行されることになる。
【0046】
本実施の形態において、φ00信号は、超音波振動子18(符号6に相当)の共振周波数のクロックであり、φ01信号は、前記φ00信号をデューティ50%になるように出力される(図3(a),図3(b)参照)。
【0047】
本実施の形態の波形整形部3では、矩形波φ00信号,φ01信号のデューティ比を約50%にする。このデューティ比は、超音波モータの効率に大きく影響する。すなわち、超音波振動子18は、印加する電力のデューティ比が狂うと、最適な超音波楕円振動を励起できず、モータのエネルギー変換効率低下、モータの出力低下を生じることになる。最適な効率を得るためには、デューティ比を約50%にすることが必要不可欠となる。
【0048】
このようにD−FF11により得られた出力が、図3(c),図3(d)に示されている。すなわち、図中上段のD−FF11の出力であるφ10信号と、図中下段に示すD−FF11の出力であるφ20信号は、それぞれ入力された基準波のデューティ比が50%であり、該φ20信号については、前記φ10信号に対し位相が90度遅れたものとなる。
【0049】
各D−FF11の出力されたφ10信号及びφ20信号は、それぞれフィルタ部4であるCRフィルタ(高周波除去回路ともいう)15を介して電力増幅部5に供給される。
【0050】
つまり、超音波モータの駆動に、不要な周波数成分が混じると、異音が発生する虞れがある。このため、本実施の形態では、CRフィルタ15を用いて不要な周波数成分を除去する処理を施している。
【0051】
この場合、CRフィルタ15は、φ10信号に対しフィルタ処理を施したφ30信号,φ31信号と(図3(e)参照)と、φ20信号に対しフィルタ処理を施したφ32信号、φ33信号(図3(f)参照)とを生成し、電力増幅部5のそれぞれ積層型圧電素子6a,6bに対応するFET16,17に出力する。
【0052】
なお、本実施の形態では、図2に示すようにフィルタ部4はCRのバントパスフィルタを使用しているが、LCフィルタ、CRフィルタを用いて構成しても良い。
【0053】
電力増幅部5は、上述したように2つのスイッチング素子であるFET16,17が用いられており、本実施の形態では、2SJと2SKタイプを組み合わせて使用した。
【0054】
スイッチング素子であるFET16は、φ30信号が入力され、HのときOFF,LのときONになる。一方のスイッチング素子であるFET17は、φ31信号が入力され、LのときOFF,HのときONになる。こうして、所定の増幅率で増幅された出力信号が駆動信号として積層圧電素子18a(符号6aに相当)に印加される。
【0055】
また、残りのスイッチング素子であるFETについても同様に動作し、もう一方の積層型圧電素子18bに印加される。
【0056】
そして、超音波振動子18は、縦共振振動と屈曲共振振動を同時に励起して図示しない駆動子に楕円振動を発生させて被駆動体を駆動させる。
【0057】
この場合、超音波振動子18の駆動状態は、縦振動を検出するモニタ電極19(検出用圧電素子7に相当)によって検出される。このモニタ電極19は、図13に示すように、厚み方向に全面分極された圧電素子を基本弾性体の側面に接着されており、該超音波振動子18の縦振動を検出し、検出結果(φ40信号)を2値化部8である2値化回路20に供給する(図3(g)参照)。
【0058】
通常、超音波振動子18は、温度変化、経時変化、素子のばらつきによって影響を受け易く、共振周波数をずらす要因になっている。そのため、本実施の形態では、モニタ電極19を用いて常時該超音波振動子18の振動状態を観察する。このモニタ電極19による検出結果、つまり、モニタ電極波形(φ40信号であり、以下、モニタ波形と称す)が図3(g)に示されている。このようなモニタ波形のφ40信号が、その後、2値化回路20によって2値化され、図3(h)に示すデジタル信号(φ41信号)を得る。
【0059】
このデジタル化されたφ41信号は、図2に示すようにCPU21の入力ポートを介して、パルス作成部9に入力され、周波数が補正されることになる。
【0060】
次に、本実施の形態に駆動回路における補正方法を図4及び図8を参照しながら詳細に説明する。
【0061】
図8は超音波振動子の振幅−周波数特性を実測した時のデータを示す特性図である。なお、図8は、横軸に周波数、縦軸にモニタ信号から進行方向に配置された積層型圧電素子に印加した信号の差(以下、モニタ位相差信号と称す)及びモニタ電極の振幅を示している。また、グラフVA、VBは、−10℃、10℃時の振幅を示し、またθA、θBは、−10℃、10℃時の位相特性を示している。
【0062】
通常、超音波振動子は、温度が高くなると共振周波数が低下する。
【0063】
10℃における超音波振動子の共振周波数は、図8によりVB(10℃)の最大振幅値(VBH:B点)より、f=82.6KHz,27DEGである。また、−10℃における超音波振動子の共振周波数は、VA(−10℃)の最大振幅値(VAH;A点)より、f=82.9KHz,28DEGである。
【0064】
モニタ電圧と共振点の関係は、モニタ電圧が最大に振れる最大値が共振点となる。また、共振点は、積層型圧電素子の温度特性に応じて変化するものである。例えば、図8に示すように、ある温度に対してのモニタ電圧VA,VB(A点,B点)は、その振幅の最大値が共振点である。また、共振点時におけるモニタ位相差信号も、一定値存在する。つまり、共振周波数が変化しても、位相差は一定となる。図8に示す特性図では、モニタ電圧VAからVBに変化に応じて位相差が、図中に示すL矢印方向に平行移動しているのが解る。この場合、位相差は一定であり、周波数fe分ずれた位相差である。そのため、制御手段であるCPU21は、このモニタ信号及び印加信号を2値化し、位相差信号を算出し、この位相差がある所定の範囲になるように、印加信号の周波数を変化させるように制御することで、実現可能になる。
【0065】
共振点では、モニタ位相差信号は、一定である。つまり、図8に示すように共振点がVAHからVBHに移動すると、モニタ位相差信号も、それに追従して平行移動する(図8中においてθAがθBに矢印L方向に平行移動)。つまり、この位相差信号が一定になるように、駆動信号の周波数を決定すれば良い。
【0066】
次に、図4を参照しながら、追従方法を説明する。
【0067】
図4(a)はパルス作成部1からの基本信号であるφ00信号、図4(b)はモニタ信号(φ40信号)、図4(c)はモニタ信号を2値化したφ41信号である。
【0068】
図4中のAの区間は、共振点の波形が示されており、このとき基準となるφ00信号と検出結果としてパルス作成部1に供給されるφ41信号とは、図中に示すようにΔθの位相差を持つことになる。
【0069】
また、図4中のBの区間は、モニタ信号が遅れている波形が示されており、このとき、φ41信号は、上記Aの区間と比較すると、Δθだけ位相が遅れているので、該φ41信号の位相をΔθだけ進めるように周波数を調整する。なお、位相が進んだ場合は、同様に位相差Δθとなるように周波数を微調整すれば良い。その結果、所定の位相差の範囲に入れると、周波数が共振点に近づき、最適な駆動が可能となる。なお、実験では、進行方向と反対側に接着された積層型圧電素子と比較しても良い結果が得られなかった。
【0070】
以上、説明したように、屈曲信号の共振周波数と、縦振動の共振周波数は、同一ではなく、縦振動の共振周波数を高くすると良い結果が実験により得られた。また、縦振動で且つ進行方向に配置された積層型圧電素子6a,6bと検出用圧電素子7から出力される信号とを比較したとき、推力が最大となった。
【0071】
すなわち、本実施の形態では、超音波モータの駆動回路において、超音波モータの駆動方向前側の積層型圧電素子6a(6b)に印加する駆動信号(φ00信号、またはφ02信号)と検出用圧電素子7からの縦振動検出結果(φ41信号)とを比較し、この比較結果を基にパルス作成部1による発信周波数の変更制御を行うことにより、各積層型圧電素子に与える駆動信号の位相差を一定に保つことができる。つまり、超音波モータにおいて、被駆動体を図1に示す超音波振動子6の積層型圧電素子6a側方向(図中上方向)に駆動させる場合には、他方の積層型圧電素子6bに印加する駆動信号をπ/2遅らせ、φ00信号とφ41信号とを比較し、比較結果を基に補正制御し、一方、積層型圧電素子6b側方向(図中下方向)に駆動させる場合には、他方の積層型圧電素子6aに印加する駆動信号をπ/2進めて、φ02信号とφ41信号とを比較し、比較結果を基に補正制御する。これにより、上記実験結果に示すように、電気−機械変換効率を最大に保つことが可能となる。
【0072】
したがって、本実施の形態によれば、駆動回路の構成が複雑になることなく、所望の状態で駆動でき且つ電気−機械変換効率を最大に保つことができる超音波モータの駆動回路を構成することができる。
次に、本発明の超音波モータの駆動回路の第2の実施の形態を図5乃至図7を参照しながら説明する。
【0073】
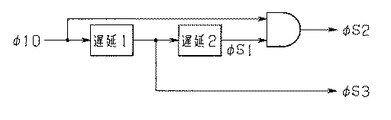
図5乃至図7は本発明の超音波モータの駆動回路の第2の実施の形態を示し、図5は本駆動回路内の波形整形回路の入出力特性を示す特性図、図6は改良がされた波形整形回路の付加回路の構成を示すブロック図、図7は本実施の形態の駆動回路の構成を示すブロック図である。なお、図7は、前記第1の実施の形態と同様な構成要素については同一の符号を付して説明を省略し、異なる部分のみを説明する。
【0074】
本実施の形態の超音波モータの駆動回路は、図7に示すようにフィルタ部4の前段の波形整形部3に、電力増幅部5に使用されている2つのスイッチング素子(FET16,17)に印加する信号が同時に駆動しない様に波形を整形する機能を有する回路群を付加したことが、図2に示す前記第1の実施の形態と異なる点である。
【0075】
この機能を実行する回路群の構成を図5乃至図7を用いて説明をする。
【0076】
図6に示すように、本実施の形態の波形整形部3には、直列接続される2個の遅延手段としての遅延回路12,13(図中には遅延1,遅延2と記載)と、AND素子とで構成される付加回路が備えられている。この付加回路は、図7に示すように、該波形整形部3のD−FF11とフィルタ部3との間に接続されるようになっている。
【0077】
上記付加回路においては、D−FF11の出力信号であるφ10信号(図5(a)参照)が供給され、このφ10信号を2つの遅延回路12,13を介することにより2段遅延したφS1信号(図5(b)参照)と前記φ10信号とをAND素子14を用いて、論理積を求め、φS2信号(図5(c)参照)が得られる。
【0078】
そして、前記φS2信号と、φ10信号を遅延回路12のみで1段遅延したφS3信号とを用いて、フィルタ部4を介し電力増幅部5のスイッチング素子であFET16,17に印加される。この場合、φS2信号がH、φS3信号がLの条件のとき、2つのFET16,17は共にONとなり、つまりショート状態になって消費電力の増加、発熱、素子の寿命低下を招く虞がある。
【0079】
しかしながら、図5(c),図5(d)のφS2信号,φS3信号を見ても解るように、φS2信号がH、φS3信号がLとなる条件が無くなり、ショート状態にならない。
【0080】
なお、遅延量は、スイッチング素子であるFET16,17のON/OFFが区別可能な時間で且つ超音波モータの駆動に影響の無い範囲であり、100μsec 程度で良い。
【0081】
他の構成については前記第1の実施の形態と同様である。
【0082】
したがって、本実施の形態によれば、前記第1の実施の形態と略同様の効果が得られる他に、電力増幅部5におけるスイッチング素子の発熱を抑えることができるので、不要な電力を用いず、また電力素子の小型化、放熱の簡素化が可能となる。
【0083】
次に、本発明の超音波モータの駆動回路の第3の実施の形態を図9乃至図11を参照しながら説明する。
【0084】
図9乃至図11は本発明の超音波モータの駆動回路の第3の実施の形態を示し、図9は本駆動回路の補正概念を説明するための説明図、図10は改良がなされたパルス作成部1内のアナログ比較回路の構成を示すブロック図、図11は本駆動回路の特徴となる補正電圧範囲を示す説明図である。なお、図10は、前記第1の実施の形態と同様な構成要素については同一の符号を付して説明を省略し、異なる部分のみを説明する。
【0085】
本実施の形態の駆動回路は、パルス作成部1内において、モニタ波形であるφ40信号を、スイッチング素子に入力する印加信号(φ30信号またはφ32信号)とのアナログ信号で比較するように構成したことが前記第1の実施の形態とは異なる点である。
【0086】
具体的には、CPU21には、2つの比較器(ウインドコンパレータ)26,27と、作動回路24と、駆動信号の切換を行うスイッチ22とで構成されたアナログ比較回路が接続される。
【0087】
上記アナログ比較回路において、図10に示すように、積層型圧電素子6a,6bに与える印加信号は、進行方向によりスイッチ22によるスイッチングによりφ30信号かφ32信号かのいずれかが選択されるようになっている。このスイッチ22の切換は、CPU21の出力ポートからの切換制御信号により切換制御されることになる。
【0088】
この切換えて取り込まれた印加信号φ53信号とモニタ波形のφ40信号とは差動回路24に入力される。この差動回路24により得られた差信号であるφ54信号は、2つの比較器26,27に供給される。また、これらの比較器26,27の他方の入力端には、それぞれ基準電圧23,25が供給される。この基準電圧23,25は、共振点時の位相差Δθに対応する電圧ΔVの上限ΔVH,下限値ΔVLを規定する。このΔVH,ΔVLの値は、ΔVに近づけるように設定をする。
【0089】
さらに詳細に説明すると、図9に示すように、モニタ波形のφ40信号及び切換えた印加信号であるφ53信号は、共振点において、ある位相差Δθの関係がある。そして、このΔθに対応する電圧ΔVが存在する。この場合、このΔVは予め積層圧電素子6a,6bの内部抵抗Rから算出し求めておく。つまり、このΔV分の範囲となるように制御すれば、図9に示すように位相差Δθを一定に保つことができる。
【0090】
このような制御を実行するためのに、差動回路24の出力である差信号54は、上限ΔVH及び下限値ΔVLと比較される。
これを、図11を用いて説明をする。比較器26は、上限値ΔVH正極の入力端に入力され、前記差信号54が負極の入力端に入力されている。すなわち、差信号54が上限値ΔVHより低い場合(ΔVH>ΔV)、その出力は、Hとなる。またこれとは逆に、差信号54が上限値ΔVHより高い場合(ΔVH<ΔV)は、その出力は、Lとなる。
【0091】
同様に、比較器27は、差信号54が正極の入力端に入力され、下限値ΔVLが負極の入力端に入力されている。すなわち、差信号54が下限値ΔVLより高い場合(ΔV>ΔVL)、その出力は、Hとなる。またこれとは逆に、差信号54が下限値ΔVLより低い場合(ΔV<ΔVL)は、その出力は、Lとなる。
【0092】
つまり、差信号54の電圧ΔVがある範囲ΔVH>ΔV>ΔVLの関係になったとき、比較器26,27の出力は共にHとなる。このとき、共振範囲となる。したがって、CPU21は、比較器26,27の出力信号57,58が共にHになるように、周波数を調整する。
【0093】
その他の構成は、前記第1の実施の形態と略同様である。
【0094】
したがって、本実施の形態によれば、前記第1の実施の形態と同様の効果が得られる他に、モニタ波形信号と印加信号とをCPUを用いず判定することで、処理の高速化が可能となり、また、回路構成を単純化できるので製造コストの低減化にも大きく寄与する。
【0095】
なお、本発明に係る第1乃至第3の実施の形態では、振動検出用圧電素子による共振縦振動の検出信号(モニタ波形)と、被駆動体の進行方向前側の積層型圧電素子に印加する駆動信号との位相差が所定範囲となるように説明したが、この所定範囲とは、駆動信号及び検出信号の振幅が最大となる際の位相差の範囲内であり、また、この最大の振幅は超音波振動子に搭載される積層型圧電素子によって決定されるものである。
【0096】
【発明の効果】
本発明により、回路構成を簡略化し且つ高効率で超音波モータを所望の状態で駆動することができ、また電気部品が小型のため、トランスや、コイル等大型部品が不要あるので、小型化,軽量化が実現可能となる超音波モータの駆動回路を提供することができる。
【図面の簡単な説明】
【図1】本発明の超音波モータの駆動回路の第1実施の形態を示し、本実施の形態における超音波モータの駆動回路の構成を示すブロック図。
【図2】図1に示す駆動回路の詳細な回路構成を示す回路図。
【図3】図2中の各回路の出力波形を示すタイミングチャート。
【図4】本駆動回路による補正動作を説明するための説明図。
【図5】本発明の超音波モータの駆動回路の第2の実施の形態を示し、本駆動回路内の波形整形回路の入出力特性を示すタイミングチャート。
【図6】改良がされた波形整形回路の付加回路の構成を示すフロック図。
【図7】本実施の形態の駆動回路の構成を示すブロック図。
【図8】超音波振動子の振幅−周波数特性を実測した時のデータを示す特性図。
【図9】本発明の超音波モータの駆動回路の第3の実施の形態を示し、本駆動回路の補正概念を説明するための説明図。
【図10】改良がなされたパルス作成部内のアナログ比較回路の構成を示すブロック図。
【図11】本駆動回路の特徴となる補正電圧範囲を説明するための説明図。
【図12】従来の超音波振動子の駆動装置の構成を示すブロック図。
【図13】他の従来の超音波リニアモータに搭載された超音波振動子を示す正面図。
【符号の説明】
1,9…パルス作成部、
2,10…移相器(移相部)、
3…波形整形部、
4…フィルタ部、
5…電力増幅部、
6…超音波振動子、
6a,6b,18a,18b…積層型圧電素子、
7,19…振動検出用圧電素子、
8,20…2値化部、
11…D−FF、
12,13…遅延回路、
14…AND素子、
15…高周波除去回路、
16,17…スイッチング素子(MOS型FET)、
21…制御手段(CPU)、
22…スイッチ。
Claims (5)
- 駆動方向に直列に配置された2つの積層型圧電素子と、前記積層型圧電素子を保持すると共に振動体として作用する弾性体と、駆動子と、振動検出用圧電素子と、前記駆動子と接触する被駆動体とを有し、縦共振振動と屈曲共振振動を同時に励起して前記駆動子に楕円振動を発生させて前記被駆動体を駆動させる超音波モータの駆動回路であって、
前記超音波モータの駆動回路は、
前記2つの積層型圧電素子に印加する90度位相のずれた駆動信号を生成し、前記超音波振動子の共振周波数を中心に所定の幅で駆動信号の周波数を変化することのできる駆動信号生成部と、
前記振動検出用圧電素子の検出信号と、前記被駆動体の進行方向前側に配置された積層型圧電素子に印加する駆動信号との位相差が所定の範囲内になるように前記駆動信号生成部を制御する制御手段と、
を具備したことを特徴とする超音波モータの駆動回路。 - 前記駆動信号生成部は、
前記駆動信号を発振するもので、前記超音波振動子の共振周波数を中心に所定の幅で前記駆動信号の周波数を変化することのできるパルス作成部と、
前記パルス作成部の出力を移相して90度位相のずれた少なくとも2つの矩形波信号を出力し、且つディユーティ比が約50%となるように処理を施す波形整形部と、
前記波形整形部からの出力の高調波成分を除去する除去機能を具備したフィルタ部と、
前記フィルタ部によるフィルタ処理後の信号を入力して増幅し、交流番圧の前記駆動信号を発生させて前記積層型圧電素子に印加する電力増幅部と、
前記振動検出用圧電素子により検出された検出信号を2値化して前記制御手段に供給する2値化部と、を具備して構成したことを特徴とする請求項1に記載の超音波モータの駆動回路。 - 前記制御手段は、前記2値化部からの検出信号と前記被駆動体の進行方向前側に配置された積層型圧電素子に印加する駆動信号との比較を行い、比較結果に基づき前記検出信号と前記駆動信号との位相差が所定の範囲内になるように前記パルス作成部による発信周波数を可変制御することを特徴とする請求項2に記載の超音波モータの駆動回路。
- 前記電力増幅部は、前記積層型圧電素子に電荷の充電と放電をそれぞれ行うことで増幅して交流番圧の駆動信号を発生させる2つのスイッチング素子で構成され、
前記波形整形部は、前記2つのスイッチング素子が同時に駆動しないように波形を整形する回路を具備したことを特徴とする請求項2に記載の超音波モータの駆動回路。 - 前記振動検出用圧電素子は、前記超音波振動子の縦共振振動を検出した検出信号を出力することを特徴とする請求項1乃至請求項4のいずれか1つに記載の超音波モータの駆動回路。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002129095A JP4139131B2 (ja) | 2002-04-30 | 2002-04-30 | 超音波モータの駆動回路 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002129095A JP4139131B2 (ja) | 2002-04-30 | 2002-04-30 | 超音波モータの駆動回路 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2003324975A JP2003324975A (ja) | 2003-11-14 |
| JP2003324975A5 JP2003324975A5 (ja) | 2005-09-29 |
| JP4139131B2 true JP4139131B2 (ja) | 2008-08-27 |
Family
ID=29542637
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002129095A Expired - Fee Related JP4139131B2 (ja) | 2002-04-30 | 2002-04-30 | 超音波モータの駆動回路 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4139131B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050225201A1 (en) * | 2004-04-02 | 2005-10-13 | Par Technologies, Llc | Piezoelectric devices and methods and circuits for driving same |
| JP4891053B2 (ja) * | 2006-12-21 | 2012-03-07 | オリンパス株式会社 | 超音波モータ |
| JP5384794B2 (ja) * | 2007-01-05 | 2014-01-08 | オリンパス株式会社 | 定在波型超音波アクチュエータの駆動方法およびその駆動装置 |
| JP2008301563A (ja) * | 2007-05-29 | 2008-12-11 | Olympus Corp | 超音波モータ駆動回路及び超音波モータの駆動信号生成方法 |
| JP2008312390A (ja) * | 2007-06-15 | 2008-12-25 | Olympus Corp | 超音波モータ駆動回路及び超音波モータの駆動信号生成方法 |
| JP2009022108A (ja) * | 2007-07-12 | 2009-01-29 | Olympus Corp | 超音波モータ駆動回路及び超音波モータの駆動信号生成方法 |
| JP2009055744A (ja) * | 2007-08-28 | 2009-03-12 | Olympus Corp | 超音波モータ駆動回路及び超音波モータの駆動信号生成方法 |
| US9455395B2 (en) * | 2014-01-10 | 2016-09-27 | Ecomotors, Inc. | Piezoelectric actuator control for high rate of operation |
| JP7024591B2 (ja) * | 2018-05-11 | 2022-02-24 | 株式会社Soken | 物体検知装置 |
| JP7205162B2 (ja) * | 2018-10-30 | 2023-01-17 | セイコーエプソン株式会社 | 圧電駆動装置、ロボットおよびプリンター |
-
2002
- 2002-04-30 JP JP2002129095A patent/JP4139131B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003324975A (ja) | 2003-11-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4139131B2 (ja) | 超音波モータの駆動回路 | |
| US9711706B2 (en) | Piezoelectric element drive circuit | |
| JP2006217716A (ja) | 超音波アクチュエータ駆動装置及び超音波アクチュエータ駆動方法 | |
| JPH072023B2 (ja) | 超音波モータの駆動回路 | |
| JP6098348B2 (ja) | 差動出力型の発振器 | |
| JP2737420B2 (ja) | 超音波モータの駆動方式 | |
| JP3126563B2 (ja) | 振動型モータの駆動装置 | |
| JP2003324975A5 (ja) | ||
| JP2007071654A (ja) | 振動ジャイロ | |
| JP5833658B2 (ja) | 超音波モータのためのアクチュエータを電気的に励起する方法及び装置 | |
| US20040232806A1 (en) | Piezoelectric transformer, power supply circuit and lighting unit using the same | |
| JP4290018B2 (ja) | 超指向性音響装置 | |
| JPS61203873A (ja) | 振動波モ−タの駆動回路 | |
| JP2699299B2 (ja) | 超音波モーターの駆動回路 | |
| JP2005245055A (ja) | 振動波駆動装置 | |
| JP2699298B2 (ja) | 超音波モータの駆動回路 | |
| JP2699300B2 (ja) | 超音波モーターの駆動回路 | |
| JPH0514997A (ja) | 超音波振動子の駆動回路 | |
| JP2002010656A (ja) | 振動アクチュエータ | |
| JPH08308263A (ja) | 超音波モータ駆動装置 | |
| JPS63194580A (ja) | 超音波モ−タ | |
| JPH06101940B2 (ja) | 超音波モ−タ− | |
| JP2990702B2 (ja) | 超音波モータの制御回路 | |
| JP2006135778A (ja) | パラメトリックスピーカ | |
| JP2699298C (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050427 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050427 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20071122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071127 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080115 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080603 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080606 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110613 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120613 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120613 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130613 Year of fee payment: 5 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |