JP5833658B2 - 超音波モータのためのアクチュエータを電気的に励起する方法及び装置 - Google Patents
超音波モータのためのアクチュエータを電気的に励起する方法及び装置 Download PDFInfo
- Publication number
- JP5833658B2 JP5833658B2 JP2013530567A JP2013530567A JP5833658B2 JP 5833658 B2 JP5833658 B2 JP 5833658B2 JP 2013530567 A JP2013530567 A JP 2013530567A JP 2013530567 A JP2013530567 A JP 2013530567A JP 5833658 B2 JP5833658 B2 JP 5833658B2
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- current
- piezoelectric
- actuator
- generator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 24
- 230000005284 excitation Effects 0.000 claims description 76
- 230000006641 stabilisation Effects 0.000 claims description 9
- 238000011105 stabilization Methods 0.000 claims description 9
- 238000007599 discharging Methods 0.000 claims description 7
- 230000009977 dual effect Effects 0.000 claims description 4
- 238000005259 measurement Methods 0.000 claims description 3
- 238000000926 separation method Methods 0.000 claims 1
- 230000010363 phase shift Effects 0.000 description 18
- 230000033001 locomotion Effects 0.000 description 7
- 239000013598 vector Substances 0.000 description 7
- 239000000919 ceramic Substances 0.000 description 5
- 239000000463 material Substances 0.000 description 3
- 230000010355 oscillation Effects 0.000 description 3
- 238000002604 ultrasonography Methods 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000001687 destabilization Effects 0.000 description 2
- 230000036039 immunity Effects 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000001627 detrimental effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 239000011224 oxide ceramic Substances 0.000 description 1
- 229910052574 oxide ceramic Inorganic materials 0.000 description 1
- 230000010287 polarization Effects 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 230000004936 stimulating effect Effects 0.000 description 1
Images














Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/06—Drive circuits; Control arrangements or methods
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/0075—Electrical details, e.g. drive or control circuits or methods
- H02N2/008—Means for controlling vibration frequency or phase, e.g. for resonance tracking
Description
圧電素子の正弦電流の位相との間に保たれた一定の位相差によって調整され、超音波モータの機能の不安定化を導く。
図面は概略により示したものであり、正確な縮尺によるものではない。
本発明の根本的な着想は、アクチュエータを通じて流れる圧電電流を、アクチュエータの容量性充電電流から分離することと、超音波アクチュエータの励起電圧の周波数を調整するために分離された圧電電流の位相シフトを用いることである。
本発明によって、機械共振周波数Fmを伴う超音波モータに対するアクチュエータを電気的に励起するための方法が得られ、該方法では、超音波モータは、励起電極及び汎用電極を備える少なくとも1つの音響定在波発生器を有し、電気キャパシタンスC0は、励起電極と汎用電極との間に生成される。本発明に応じた方法において、矩形励起電圧Ugは、少なくとも1つの音響定在波発生器の励起電極及び汎用電極に印加され、矩形励起電圧Ugの周波数は、アクチュエータの機械共振周波数Fmとは異なる。次いで、フィードバック要素の手段によって、電圧ugが供給され、電圧ugは、定在波発生器を通じて流れる電流Igに比例し、電流Igは、圧電電流Ipと電気キャパシタンスC0の充電及び放電電流Icとの和によって生成される総合電流である。続いて、電圧upを電圧ucからインパルスフィルタの手段によって分離する工程が行われ、電圧upは、圧電電流Ipに比例し、電圧ucは電気キャパシタンスC0の充電及び放電電流Icに比例する。最後に、圧電電流Ipと矩形励起電圧Ugとの間の位相差がほぼゼロになるように、矩形励起電圧の周波数が変化する。
リッジパワーアンプ、ブリッジパワーアンプ、又はデュアルクロックパワーアンプとして設計される。これは、電圧セレクタスイッチの内部抵抗を著しく低減させることを可能にし、よって、可能な限りキャパシタの充電及び放電電流Icのパルス期間を短くする。
さらに、超音波モータの圧電アクチュエータを電気的に励起するための装置が自動式の発生器として実装される場合、有利であり得る。
制御電圧形成装置が対称なパルス幅変調(PWM)変調器を有する場合もまた、有利であり得る。対称なPWM変調器の使用によって、電流Ip、すなわち、駆動される要素の動きの速度を調整することができる。
さらに、超音波モータの圧電アクチュエータを電気的に励起するための装置の電気コンポーネントが、部分的に又は完全に、DSP(デジタルシグナルプロセッサ)又はFPGA(フィールドプログラム可能ゲートアレイ)のタイプのプログラム可能なデジタルプロセッサによって実装される場合、便利であり得る。これは、電気励起装置の設計を単純にすることができ、すなわち、その設計のコストを低減させるとともに、干渉に対する耐性を増加させる。
装されることもできる。共振器5は、圧電セラミックの材料から成るが、金属、酸化物セラミック、金属セラミック、単結晶の材料、又は高い機械Q値を有する他の材料からも成ることができる。共振器5は、音響超音波に対する閉じた、又は開放された導波管を形成することができる。
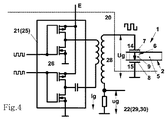
電圧を印加するように、電極7及び8は、出力14,15を有する。出力14,15は、より線の導体として実装されるが、弾性要素又は電気的に導電性ゴム要素として実装されることもできる。
発生器6は、共振器5において音響超音波の定在波を発生するように用いられ、共振器5は、超音波モータによってモータの動作のために用いられる。この波は、縦波、たわみ波、剪断波、ねじれ波、体積波、平面波、表面波、対称、非対称又は異なるタイプの音響波であり得る。用いられる波のタイプ及び形状は、共振器5の幾何学形状、電極7及び8の形状、圧電セラミックの二極化ベクトルの電極7及び8に対する方向、及び励起電圧Ugの周波数によって決定される。
パスフィルタ33として設計される。しかしながら、ローパスフィルタ34又は積分器35(図6参照)としても設計され得る。さらに、インパルスフィルタ23は、比較器又はインパルス装置(図7参照)であり得る。これらのフィルタは、フィードバック要素22によって提供される電圧ugに対する回路遮断器37を含んでおり、制御入力38は、電圧セレクタ21に、エッジ検出器39を通じて接続される。さらに、インパルスフィルタ23は、パッシブ又はアクティブな電気コンポーネントから成ることができ、又は、自由にプログラム可能なマイクロコントローラとともに実装されることができる。
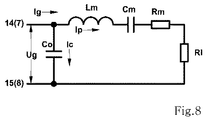
図8は、機械共振周波数Fmの領域における超音波モータ1に対する定在波発生器6の電気機械パラメータを図示するように、等価回路を示す。この回路における記号は、次の意味を有する。C0=電気キャパシタンスであって、電極7と電極8との間に生成される;Lm=電気インダクタンスであって、アクチュエータ2の質量に比例する;Cm=電気キャパシタンスであって、アクチュエータ2の弾性コンプライアンスに比例する;Rm=電気抵抗であって、アクチュエータ2における機械損失に比例する;R1=電気抵抗であって、アクチュエータ2の負荷の機械抵抗に比例する。
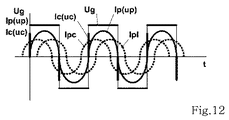
p)もまた正弦波を有する。この場合、電流Igの振幅と電流Ip(Vp)の振幅とは、図9の例40に示される関係を有する。図9の表示41は、周波数における電圧Ugと電流Igとの位相シフトの依存性を示す。
機械共振周波数Fmにおいて、インダクタンスLmは、キャパシタンスCmによって補償されるため、この周波数において、電流Ip(矩形励起電圧Ugに対する有効電流、又は実効電流、すなわち、電流の位相シフト)は、ゼロである。
機能の説明
超音波モータ1のアクチュエータ2を電気的に励起するための本発明に応じた方法は、電気矩形励起電圧Ugがアクチュエータ2の音響超音波定在波のためのメイン発生器6の励起電極7及び汎用電極8に印加され、その周波数Fは、初期において、アクチュエータ2の機械共振周波数Fmから僅かに異なる、という事実に基づく。次いで、フィードバック要素22は、アクチュエータ2の発生器6を通じて流れる電流Igに比例する電圧ugを分岐(タップオフ)させる。この後、インパルスフィルタ23によって、圧電電流Ip
に比例する電圧upは、キャパシタンスC0の充電及び放電電流Icに比例する電圧ucから分離される。次に、圧電電流Ipと矩形励起電圧Ugとの位相差φpがゼロの値に近づくように、又はゼロと等しくなるように、矩形励起電圧Ugの周波数Fが変更される。アクチュエータ2の音響定在波のための発生器6を通じて流れる圧電電流Ipは、従って、安定化される。
バンドパスフィルタ33としてのインパルスフィルタ23の実装は、機械共振周波数Fmにおける位相誤差が除去されることを可能にし、一方、ローパスフィルタ34又は積分器35とされるインパルスフィルタ23の設計は、これらのフィルタが極めて単純に設計されることを可能にする。
電気励起装置20における電気供給電圧のための対称なPWM変調器53又はレギュレータを用いることによって、電流Ip(Vp)、すなわち、駆動される要素4の動きの速度を調整することが可能である。
本発明に応じた方法及び本発明に応じた装置は、励起電圧の周波数を、超音波アクチュエータに対する最適値に保持されるようにする。この周波数は、アクチュエータの機械共振周波数に等しい値において一定に保たれており、超音波モータのアクチュエータに適用される負荷とは独立している。これは、超音波モータの動作安定度を増加する。超音波モータは常に最適な動作範囲において動作しているため、超音波モータの動作に必要とされる励起電圧及び電流の大きさ又は電力は低減される。モータは、より少ない程度にしか加熱されず、よって、動作温度範囲を延長する。
Claims (15)
- 機械共振周波数Fmを有する超音波モータの圧電アクチュエータを電気的に励起する方法であって、該圧電アクチュエータは、励起電極と汎用電極とを備える少なくとも1つの音響定在波発生器を有しており、前記励起電極と前記汎用電極との間に、電気キャパシタンスC0が生成され、
矩形励起電圧Ugを、前記少なくとも1つの音響定在波発生器の前記励起電極と前記汎用電極とに印加する工程であって、前記矩形励起電圧Ugの周波数は、前記圧電アクチュエータの機械共振周波数Fmとは異なる、前記印加する工程と、
電圧ugをフィードバック要素によって提供する工程であって、提供された前記電圧ugは、前記音響定在波発生器を通じて流れる電流Igに比例し、電流Igは、圧電電流Ipと前記電気キャパシタンスC0の充電及び放電電流Icとの和による総合電流である、前記提供する工程と、
電圧upを電圧ucからインパルスフィルタによって分離する工程であって、電圧upは、圧電電流Ipに比例し、電圧ucは、前記電気キャパシタンスC0の充電及び放電電流Icに比例する、前記分離する工程と、
前記圧電電流Ipと前記矩形励起電圧Ugとの間の位相差がほぼゼロになるように、前記矩形励起電圧U g の周波数を変更する工程と、を備える方法。 - 前記音響定在波発生器を通じて流れる前記圧電電流Ipは安定化される、請求項1に記載の方法。
- 超音波モータの圧電アクチュエータを電気的に励起する装置であって、
該圧電アクチュエータは、機械共振周波数F m を有し、かつ、少なくとも1つの音響定在波発生器を有しており、前記少なくとも1つの音響定在波発生器は、電気キャパシタンスC 0 を形成するための励起電極と汎用電極とを備え、
前記装置は、少なくとも1つのパワーアンプと、フィードバック要素と、フィルタと、制御電圧形成装置と、を備えており、
前記少なくとも1つのパワーアンプは、直接的に又は非直接的に前記少なくとも1つの音響定在波発生器に接続されており、前記圧電アクチュエータの供給電圧に対する電圧セ
レクタスイッチとして実装されており、前記少なくとも1つのパワーアンプは、矩形励起電圧U g を、前記少なくとも1つの音響定在波発生器に提供し、
前記音響定在波発生器を通る電流と同じ電流が前記フィードバック要素を通るように、および、前記フィードバック要素によって、電圧u g が提供されるように、該フィードバック要素は、該音響定在波発生器に直列に接続されており、提供された前記電圧u g は、前記音響定在波発生器を通じて流れる電流I g に比例し、電流I g は、圧電電流I p と前記電気キャパシタンスC 0 の充電及び放電電流I c との和による総合電流であり、
前記フィルタは、前記フィードバック要素によって生成される電圧のインパルスフィルタとして実装されており、前記インパルスフィルタは、電圧u p の電圧u c からの分離を可能にするように設計されており、電圧u p は、圧電電流I p に比例し、電圧u c は、前記電気キャパシタンスC 0 の充電及び放電電流I c に比例し、
前記制御電圧形成装置の入力部は、前記インパルスフィルタの出力部に接続されており、前記制御電圧形成装置の出力部は、前記少なくとも1つのパワーアンプの入力部に接続されており、前記制御電圧形成装置は、前記圧電電流I p と前記矩形励起電圧U g との間の位相差がほぼゼロになるように前記矩形励起電圧U g の周波数を変更するよう設計されている、装置。 - 前記電圧セレクタスイッチは、ハーフブリッジパワーアンプと、ブリッジパワーアンプと、デュアルクロックパワーアンプとのうちのいずれか1つとして実装される、請求項3に記載の装置。
- 前記フィードバック要素は、低い値の実効抵抗として実装されるか、又は電流に対する測定変圧器として実装される、請求項4に記載の装置。
- 前記インパルスフィルタは、フィードバック要素によって生成される電圧に対するバンドパスフィルタとして実装されており、前記圧電アクチュエータの機械共振周波数Fmに同調される、請求項3〜5のいずれか1項に記載の装置。
- 前記インパルスフィルタは、フィードバック要素によって生成される電圧に対するローパスフィルタ又は積分器として実装される、請求項3〜5のいずれか1項に記載の装置。
- 前記インパルスフィルタは、前記フィードバック要素によって生成される電圧に対する回路遮断器を備えており、該インパルスフィルタの制御入力は、エッジ検出器を通じて前記電圧セレクタスイッチに接続される、請求項3〜5のいずれか1項に記載の装置。
- 前記インパルスフィルタは、電圧比較器として実装される、請求項3〜5のいずれか1項に記載の装置。
- 前記装置は自動式の発生器として実装される、請求項9に記載の装置。
- 前記制御電圧形成装置は、矩形波に対する、位相検出器及び制御式の発生器を備える、請求項3〜9のいずれか1項に記載の装置。
- 前記制御電圧形成装置は、対称なパルス幅変調式の変調器である、請求項8〜11のいずれか1項に記載の装置。
- 前記装置は、前記パワーアンプに与える電圧に対するレギュレータを有する、請求項8〜12のいずれか1項に記載の装置。
- 前記装置は、前記音響定在波発生器を通じて流れる圧電電流に対する安定化システムを
有する、請求項3〜13のいずれか1項に記載の装置。 - 前記装置の電気コンポーネントの一部又は全部は、デジタルシグナルプロセッサ又はフィールドプログラム可能ゲートアレイのタイプのプログラム可能なデジタルプロセッサによって実現される、請求項3〜14のいずれか1項に記載の装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102010047280.8 | 2010-10-01 | ||
| DE102010047280A DE102010047280A1 (de) | 2010-10-01 | 2010-10-01 | Verfahren und Vorrichtung zur elektrischen Erregung eines Aktors für einen Ultraschallmotor |
| PCT/DE2011/050037 WO2012048691A2 (de) | 2010-10-01 | 2011-09-28 | Verfahren und vorrichtung zur elektrischen erregung eines aktors für einen ultraschallmotor |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013539346A JP2013539346A (ja) | 2013-10-17 |
| JP2013539346A5 JP2013539346A5 (ja) | 2014-08-14 |
| JP5833658B2 true JP5833658B2 (ja) | 2015-12-16 |
Family
ID=45540689
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013530567A Active JP5833658B2 (ja) | 2010-10-01 | 2011-09-28 | 超音波モータのためのアクチュエータを電気的に励起する方法及び装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9479088B2 (ja) |
| EP (1) | EP2622726B1 (ja) |
| JP (1) | JP5833658B2 (ja) |
| DE (1) | DE102010047280A1 (ja) |
| WO (1) | WO2012048691A2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2960522A1 (en) * | 2014-06-27 | 2015-12-30 | Alcatel Lucent | Apparatus and method for operating an oscillation blade device and a system comprising the apparatus |
| US10883486B1 (en) * | 2017-11-21 | 2021-01-05 | Huilin Zhou | Forced surface traveling wave-driven microfluidic pump |
| KR20210155633A (ko) | 2020-06-16 | 2021-12-23 | 엘지이노텍 주식회사 | 초음파 리니어 모터 및 이의 구동 방법 |
| CN115040200B (zh) * | 2022-05-20 | 2023-11-03 | 以诺康医疗科技(苏州)有限公司 | 超声手术工具、其频率跟踪方法、其目标相位差确定方法及超声波换能器等效电路 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0442469B1 (en) | 1990-02-14 | 1995-07-26 | Nikon Corporation | Driving device for ultrasonic wave motor |
| JP2863280B2 (ja) | 1990-07-04 | 1999-03-03 | アスモ株式会社 | 超音波モータの駆動方法 |
| KR100204460B1 (ko) | 1992-12-16 | 1999-06-15 | 모리시타 요이찌 | 초음파모터의 속도제어방법 |
| EP0789937B1 (de) | 1994-10-31 | 2000-05-17 | Pi Ceramic GmbH | Piezoelektrischer motor |
| JP4499877B2 (ja) * | 2000-06-13 | 2010-07-07 | セイコーインスツル株式会社 | 超音波モータおよび超音波モータ付き電子機器 |
| US7218029B2 (en) * | 2001-05-22 | 2007-05-15 | Texas Instruments Incorporated | Adjustable compensation of a piezo drive amplifier depending on mode and number of elements driven |
| US6794795B2 (en) * | 2001-12-19 | 2004-09-21 | Caterpillar Inc | Method and apparatus for exciting a piezoelectric material |
| DE10218565A1 (de) * | 2002-04-26 | 2003-11-06 | Philips Intellectual Property | Startprozess-Steuerung für den Anlauf eines Piezomotors |
| US7287965B2 (en) * | 2004-04-02 | 2007-10-30 | Adaptiv Energy Llc | Piezoelectric devices and methods and circuits for driving same |
| DE102005039358B4 (de) * | 2005-08-19 | 2016-12-08 | Physik Instrumente (Pi) Gmbh & Co. Kg | Piezoelektrischer Aktor für einen Ultraschallmotor |
| DE102006042695B4 (de) * | 2006-01-18 | 2012-02-23 | Physik Instrumente (Pi) Gmbh & Co. Kg | Selbsterregender PWM-Controller für einen Einphasenultraschallmotor |
| DE102006025991B4 (de) * | 2006-06-02 | 2012-02-23 | Physik Instrumente (Pi) Gmbh & Co. Kg | Selbsterregender Niederspannungscontroller zur Steuerung eines oder mehrerer Ultraschallmikromotoren |
| DE102006054597B4 (de) * | 2006-11-20 | 2012-03-01 | Physik Instrumente (Pi) Gmbh & Co. Kg | Steuervorrichtung eines Ultraschallmotors |
| DE102007016642B4 (de) * | 2007-04-05 | 2015-12-17 | Austriamicrosystems Ag | Elektromechanisches System und Verfahren zum Betrieb eines elektromechanischen Systems |
| DE102008012992A1 (de) * | 2008-03-07 | 2009-09-10 | Physik Instrumente (Pi) Gmbh & Co. Kg | Ultraschallmotor |
| IT1393824B1 (it) * | 2009-04-20 | 2012-05-11 | Zobele Holding Spa | Atomizzatore di liquidi con dispositivo di vibrazione piezoelettrico a circuito elettronico di controllo perfezionato e relativo metodo di azionamento. |
| JP5740879B2 (ja) * | 2009-09-18 | 2015-07-01 | 株式会社村田製作所 | 圧電アクチュエーター駆動回路 |
| US20110260988A1 (en) * | 2010-01-20 | 2011-10-27 | Northwestern University | Method and apparatus for increasing magnitude and frequency of forces applied to a bare finger on a haptic surface |
-
2010
- 2010-10-01 DE DE102010047280A patent/DE102010047280A1/de not_active Withdrawn
-
2011
- 2011-09-28 JP JP2013530567A patent/JP5833658B2/ja active Active
- 2011-09-28 US US13/877,235 patent/US9479088B2/en active Active
- 2011-09-28 WO PCT/DE2011/050037 patent/WO2012048691A2/de active Application Filing
- 2011-09-28 EP EP11813663.9A patent/EP2622726B1/de active Active
Also Published As
| Publication number | Publication date |
|---|---|
| DE102010047280A1 (de) | 2012-04-05 |
| JP2013539346A (ja) | 2013-10-17 |
| US9479088B2 (en) | 2016-10-25 |
| WO2012048691A3 (de) | 2012-05-24 |
| WO2012048691A2 (de) | 2012-04-19 |
| EP2622726B1 (de) | 2016-03-09 |
| US20130307440A1 (en) | 2013-11-21 |
| EP2622726A2 (de) | 2013-08-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2006217716A (ja) | 超音波アクチュエータ駆動装置及び超音波アクチュエータ駆動方法 | |
| US8773004B2 (en) | Circuit for optimizing the recovery of vibratory energy by a mechanical/electrical converter | |
| JP6579778B2 (ja) | 振動型駆動装置、振動型駆動装置を備える交換用レンズ、撮像装置、及び振動型駆動装置の製造方法 | |
| JP5833658B2 (ja) | 超音波モータのためのアクチュエータを電気的に励起する方法及び装置 | |
| JP5587418B2 (ja) | アクチュエータ | |
| JPH03145976A (ja) | 超音波モータの駆動装置 | |
| JPH09140168A (ja) | 振動モータの駆動装置 | |
| US10638590B2 (en) | Method for frequency control of a piezoelectric transformer and circuit arrangement comprising a piezoelectric transformer | |
| JP5792951B2 (ja) | 振動型アクチュエータの制御装置 | |
| US20060273689A1 (en) | Oscillatory-wave actuator and method for driving oscillatory-wave actuator | |
| JP2009284635A (ja) | 駆動装置 | |
| JP2013539346A5 (ja) | ||
| JP4139131B2 (ja) | 超音波モータの駆動回路 | |
| JPS622869A (ja) | 超音波モ−タ駆動装置 | |
| Zhao et al. | Driving Techniques for Ultrasonic Motors | |
| JP3172343B2 (ja) | 超音波モータ | |
| US20040232806A1 (en) | Piezoelectric transformer, power supply circuit and lighting unit using the same | |
| US20070108869A1 (en) | Driving and control apparatus of piezoelectric ultrasonic motor | |
| JP7520687B2 (ja) | 振動型駆動装置及び駆動方法 | |
| Li et al. | A Novel Nonlinear Tuning Method for Sandwichtype Ultrasonic Motors Under High Voltage | |
| JP4765405B2 (ja) | 超音波モータ駆動装置 | |
| JPH02179282A (ja) | 超音波モータの駆動回路 | |
| Mujjalinvimut et al. | A design study of ultrasonic motor drive | |
| JPH01209967A (ja) | 超音波モータの制御装置 | |
| TW294857B (en) | The driving circuit for traveling-wave type ultrasonic motor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140627 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140627 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150409 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150602 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150820 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150929 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151029 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5833658 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |