JP2009284635A - 駆動装置 - Google Patents
駆動装置 Download PDFInfo
- Publication number
- JP2009284635A JP2009284635A JP2008133253A JP2008133253A JP2009284635A JP 2009284635 A JP2009284635 A JP 2009284635A JP 2008133253 A JP2008133253 A JP 2008133253A JP 2008133253 A JP2008133253 A JP 2008133253A JP 2009284635 A JP2009284635 A JP 2009284635A
- Authority
- JP
- Japan
- Prior art keywords
- drive
- component
- fundamental frequency
- harmonic
- piezoelectric element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims abstract description 58
- 230000008602 contraction Effects 0.000 claims abstract description 17
- 230000000737 periodic effect Effects 0.000 claims abstract description 4
- 239000000284 extract Substances 0.000 claims description 3
- 230000006698 induction Effects 0.000 abstract 2
- 238000010586 diagram Methods 0.000 description 4
- 230000005684 electric field Effects 0.000 description 3
- 229910001252 Pd alloy Inorganic materials 0.000 description 2
- SWELZOZIOHGSPA-UHFFFAOYSA-N palladium silver Chemical compound [Pd].[Ag] SWELZOZIOHGSPA-UHFFFAOYSA-N 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- 229910001080 W alloy Inorganic materials 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
Images


Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Abstract
【課題】圧電アクチュエータの圧電素子の伸縮を最適化できる駆動装置を提供する。
【解決手段】伸縮に応じて電荷が誘導される検出電極11を備える圧電素子2と、圧電素子2に一端が固定された駆動軸と、駆動軸に摩擦係合する移動部材と、圧電素子2に周期的な駆動電圧を印加可能な駆動回路6と、検出電極11の誘導電荷Qの変化の基本周波数成分と第2次高調波成分とを求める検出回路7と、誘導電荷Qの基本周波数成分および第2次高調波成分に応じて駆動回路6を制御し、駆動電圧の波形を変化させる制御装置8とを有する。
【選択図】図2
【解決手段】伸縮に応じて電荷が誘導される検出電極11を備える圧電素子2と、圧電素子2に一端が固定された駆動軸と、駆動軸に摩擦係合する移動部材と、圧電素子2に周期的な駆動電圧を印加可能な駆動回路6と、検出電極11の誘導電荷Qの変化の基本周波数成分と第2次高調波成分とを求める検出回路7と、誘導電荷Qの基本周波数成分および第2次高調波成分に応じて駆動回路6を制御し、駆動電圧の波形を変化させる制御装置8とを有する。
【選択図】図2
Description
本発明は、駆動装置、特に、圧電アクチュエータを用いた駆動装置に関する。
例えば、特許文献1には、圧電素子と、圧電素子に固定された駆動軸と、駆動軸に摩擦係合する移動体とを有し、圧電素子に周期的な駆動電圧を印加して、圧電素子を鋸歯状に伸縮させることで、駆動軸を非対称に振動させ、移動体を駆動軸に対してすべり変位させる圧電アクチュエータが記載されている。駆動電圧の波形を制御することは可能であるが、圧電素子の伸縮は、駆動電圧には完全に一致せず、圧電アクチュエータの駆動効率を最適化することは容易ではなかった。
特許文献2には、圧電素子の電極に対向する検出電極を設け、検出電極に蓄積される誘導電荷を検出することで、圧電素子の伸縮状態を正確に把握する発明が記載されている。圧電素子を動作速度の遅い機器に使用する場合は、検出した誘導電荷の値をフィードバックすることで、圧電素子の伸縮を最適化することが可能である。しかしながら、圧電アクチュエータのように高周波領域で圧電素子を伸縮させる場合には、通常のフィードバック制御では制御が間に合わず、圧電素子の伸縮波形を制御することができない。
特開平11−103583号公報
特開平10−209516号公報
前記問題点に鑑みて、本発明は、圧電アクチュエータの圧電素子の伸縮を最適化できる駆動装置を提供することを課題とする。
前記課題を解決するために、本発明による駆動装置は、伸縮に応じて電荷が誘導される検出電極を備える圧電素子と、前記圧電素子に一端が固定された駆動軸と、前記駆動軸に摩擦係合する移動部材と、前記圧電素子に周期的な駆動電圧を印加可能な駆動回路と、前記検出電極の誘導電荷の変化の基本周波数成分と第2次高調波成分とを求める検出回路と、前記誘導電荷の基本周波数成分および第2次高調波成分に応じて前記駆動回路を制御し、前記駆動電圧の波形を変化させる制御装置とを有するものとする。
この構成によれば、検出電極の誘導電荷の基本周波数成分と第2次高調波成分とが、実際の圧電素子の振動波形に最も寄与する伸縮量の基本周波数成分と第2次高調波成分とに比例するので、誘導電荷の基本周波数成分と第2次高調波成分とに基づいて駆動電圧の波形を変更することで、圧電素子の振動波形を理想的な近づけることができる。
また、本発明の駆動装置において、前記検出回路は、前記誘導電荷を示す変量をフーリエ解析してもよい。
この構成によれば、マイコンによるディジタル処理が可能である。
また、本発明の駆動装置において、また、本発明の駆動装置において、前記検出回路は、前記駆動電圧の基本周波数と同じ周波数成分を抽出する基本波フィルタと、前記駆動電圧の基本周波数の2倍の2次高調波成分を抽出する高調波フィルタとを有してもよい。
圧電アクチュエータを駆動する際、圧電素子の伸縮波形の基本周波数は、駆動電圧の基本周波数と一致するの。このため、基本波フィルタおよび高調波フィルタによって、圧電素子の伸縮波形の基本周波数およびその倍の周波数の成分の大きさを検出可能である。
また、本発明の駆動装置において、前記検出回路は、前記検出電極に流れ込む電流を電圧信号に変換する変換器を有することを特徴とする駆動装置。
この構成によれば、検出電極に流れ込む充電/放電電流の値は、検出電極の誘導電荷を時間微分したものになる。よって、この電流値を電圧信号に変換することで、基本波成分および2次高調波成分を検出することが容易になる。
また、本発明の駆動装置において、前記制御装置は、前記誘導電荷の基本周波数成分の振幅が第2次高調波成分の振幅の4倍になるように、前記駆動電圧の基本周波成分および第2次高調波成分の少なくともいずれかの振幅を調整してもよい。
基本波と2次高調波のみで形成される波形は、基本波成分の振幅が2次高調波成分の4倍になるとき、伸長速度と収縮速度との差が最も大きくなり、圧電アクチュエータの駆動効率を極大化できる。
また、本発明の駆動装置において、前記制御装置は、前記誘導電荷の基本周波数成分と第2次高調波成分との位相差が0°または180°になるように、前記駆動電圧の基本周波成分および第2次高調波成分の少なくともいずれかの位相を調整してもよい。
基本波と2次高調波のみで形成される波形は、基本波成分と2次高調波成分との位相差が0°および180°のとき、伸長速度と収縮速度との差が正および負の最大となる。このため、基本波成分と2次高調波成分との位相差に応じて駆動電圧を調整することで、圧電アクチュエータの駆動効率を極大化できる。
また、本発明の駆動装置において、前記駆動電圧は、前記誘導電荷の基本周波数と同じ周波数のデューティ比0.5の矩形波と、前記誘導電荷の基本周波数の2倍の周波数のデューティ比0.5の矩形波からなってもよい。
理想的なデューティ比0.5の矩形波は、2次高調波成分を含まず、3次以上の高調波成分も基本波に比べて十分小さいので、独立して制御可能な基本周波数の矩形波とその倍の周波数の矩形波とを重畳することによって、駆動電圧の基本波成分および2次高調波成分の振幅や位相を容易に調整できる。また、矩形波は、簡単で安価な回路によって供給できる。
また、本発明の駆動装置において、前記駆動電圧は、前記誘導電荷の基本周波数と同じ周波数の矩形波であって、前記制御装置は、前記駆動電圧のデューティ比を変化させてもよい。
矩形波のデューティを変更すると、高調波成分はデューティ比0.5のときに最大になり、0.5から離れるほど小さくなる。つまり、デューティ比の変更によっても、駆動電圧の基本波成分と2次高調波成分との比を変化させることができ、圧電アクチュエータの駆動効率を極大化することができる。
また、本発明の駆動装置において、前記検出電極は、前記圧電素子の前記駆動軸と反対側の端部に固定された錘であってもよい。
この構成によれば、圧電アクチュエータの構成要素である錘を検出電極としても利用するので、装置を簡素化でき、駆動装置のコスト上昇を抑制できる。
本発明によれば、圧電素子に設けた検出電極の誘導電荷の基本周波数成分と2次高調波成分とに基づいて、圧電素子の駆動電圧の波形を調整するので、圧電素子の伸縮波形を理想的な鋸歯状の波形に近づけて、駆動効率を最適化できる。
これより、本発明の実施形態について、図面を参照しながら説明する。
図1は、本発明の第1実施形態の駆動装置1の構成を示す。駆動装置1は、圧電素子2、一端が圧電素子2に固定された駆動軸3、および、駆動軸2に摩擦係合する移動体4からなる圧電アクチュエータ5と、圧電素子2に周期的な駆動電圧を印加する駆動回路6と、圧電アクチュエータ5の伸縮状態を検出する検出回路7と、検出回路7の出力に基づいて、駆動回路6を制御する制御装置8とを有する。
図1は、本発明の第1実施形態の駆動装置1の構成を示す。駆動装置1は、圧電素子2、一端が圧電素子2に固定された駆動軸3、および、駆動軸2に摩擦係合する移動体4からなる圧電アクチュエータ5と、圧電素子2に周期的な駆動電圧を印加する駆動回路6と、圧電アクチュエータ5の伸縮状態を検出する検出回路7と、検出回路7の出力に基づいて、駆動回路6を制御する制御装置8とを有する。
圧電素子2は、例えばPZTのような圧電材料からなる複数の圧電層9を、例えば銀パラジウム合金からなる2組の対向電極10a,10bを交互に挟み込んで積層してなり、一端に、圧電層9を介して対向電極10bに対向するように、例えば銀パラジウム合金からなる検出電極11が設けられている。駆動回路6の1対の出力端には、それぞれ対向電極10a,10bのいずれかが並列に接続されている。駆動回路6が駆動電圧を出力すると、対向電極10a,10b間に電界が形成され、この電界に応じて圧電層9が伸縮する。圧電層9に印加される電界強度は、対向電極10a,10bに充電される電荷量に比例する。そして、検出電極11には、隣接する対向電極10bの電荷量に比例した電荷が誘導される。つまり、検出電極11の誘導電荷量は圧電素子2の伸縮量に比例する。
検出回路7は、圧電素子2の検出電極11の誘導電荷量を検出し、その誘導電荷量の変化の波形の基本周波数成分と、2次高調波成分(基本周波数の倍の周波数成分)との振幅を検出し、制御装置8に入力する。
駆動回路6は、制御回路8から入力される制御信号に基づいて、圧電素子2に印加する駆動電圧の波形を、その周波数成分毎に振幅および位相を調整できるようになっている。制御装置8は、検出回路7の出力に応じて、駆動回路6に対し、駆動電圧の前記誘導電荷の2次高調波成分と同じ周波数の成分の振幅と、前記基本周波数成分に対する位相とをそれぞれ指定する制御信号を変化させる。詳しくは、制御装置8は、駆動電圧の基本周波数成分が2次高調波成分の4倍になるように、且つ、駆動電圧の基本周波数成分と2次高調波成分との位相差が、駆動方向に応じて0°または180°になるように、駆動回路6に入力する制御信号を変化させる。
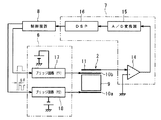
図2に、駆動回路6、検出回路7の構成を詳しく示す。駆動回路6は、それぞれ正弦波発生器からなる基本波発生器12および高調波発生器13を有し、基本波発生器12の出力と高調波発生器13の出力とを重畳して、圧電素子2の対向電極10bに印加するようになっている。基本波発生器12は、電圧V1=Asin(ωt+θ1)を発生し、高調波発生器13は、電圧V2=Bsin(2ωt+θ2)を発生する。基本波発生器12および高調波発生器13は、それぞれ、出力電圧の振幅A,Bおよび位相θ1,θ2を任意に設定可能である。なお、ωは、圧電アクチュエータ5の最適な駆動周波数をfdとすると、ω=1/2πfで表される角速度であり、一定である。
検出回路7は、検出電極11の充電電流Iを電圧信号に変換するオペアンプからなる電流−電圧変換器14と、電流−電圧変換器14の出力をディジタル信号に変換するA/D変換器15と、このディジタル信号をフーリエ解析するDSP(Digital Signal Processor)16からなる。DSP16は、充電電流Iの基本波成分および高調波成分の振幅および位相をディジタル信号で出力する。
本実施形態では、圧電素子2には、基本波発生器12が出力する周波数2πωの電圧成分と、高調波発生器13が出力する周波数4πωの電圧成分としか印加されないので、検出される充電電流Iの基本周波数は、2πωであり、3次以上の高調波は検出されない。
また、検出回路7は、検出電極11の充電電流Iを検出しているが、充電電流Iは、検出電極11の誘導電荷Qを時間微分した値になる。このため、DSP16が出力する充電電流Iの基本波成分と2次高調波成分との比は、誘導電荷Qの基本波成分と2次高調波成分との比の2分の1になる。
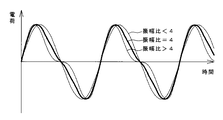
図3に、誘導電荷Qの基本波成分と2次高調波成分との位相差がない場合の振幅比による波形の違いを例示する。誘導電荷Qは、基本波成分の振幅が2次高調波成分の振幅の4倍になるとき、最も理想的な鋸歯状の波形となるが、基本波成分の2次高調波成分に対する振幅比が4より大きくなっても、4より小さくなっても、立ち上がりと立ち下がりの傾きの差が小さくなる。
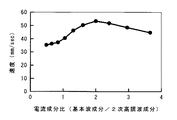
図4に、このような、基本周波数成分と2次高調波成分との比による圧電アクチュエータ5の移動体4の移動速度の変化を示す。このグラフでは、検出回路7が検出する検出電極11の充電電流Iの基本周波数成分と2次高調波成分との比に対する移動体3の移動速度を示しているが、検出電極11の誘導電荷Qの基本周波数成分と2次高調波成分との比は図示する成分比の2倍である。図4に示すように、移動体4の移動速度、つまり、圧電アクチュエータ5の駆動速度は、検出電極11の誘導電荷Qの基本周波数成分の振幅が2次高調波成分の振幅の4倍になるとき最大になる。
よって、制御装置8は、DSP16から入力される検出電極11の充電電流Iの基本周波数成分と2次高調波成分との比が2になるように、つまり、検出電極11の誘導電荷Qの変化の基本波成分の振幅と2次高調波成分の振幅との比が4になるように、高調波発生器13の出力電圧の振幅Bの設定値にフィードバックをかける。
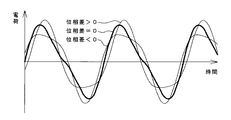
また、図5に、誘導電荷Qの基本波成分と2次高調波成分との振幅比が4である場合の位相差による波形の違いを例示する。誘導電荷Qは、基本波成分と2次高調波成分との位相差が0であるとき、最も理想的な鋸歯状の波形となるが、位相差がプラスになってもマイナスになっても立ち上がりと立ち下がりの傾きの差が小さくなる。
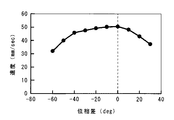
図6に、このような、基本周波数成分と2次高調波成分との位相差による圧電アクチュエータ5の移動体4の移動速度の変化を示す。図示するように、移動体4の移動速度、つまり、圧電アクチュエータ5の駆動速度は、検出電極11の誘導電荷Qの基本周波数成分と2次高調波成分との位相差が0°のときに最大になる。
なお、位相差が±90°以上になると、図5における立ち上がりの傾きと立ち下がりの傾きとの大小が入れ替わり、位相差が180°になると、位相差0°の波形を左右反転した形状になる。つまり、圧電アクチュエータ5の駆動速度は、位相差180°において逆方向の最大値を示す。
よって、制御装置8は、DSP16から入力される基本波成分と2次高調波成分との位相差が駆動方向に応じて、0°または180°のいずれかになるように、高調波発生器13の出力電圧の位相θ2の設定値にフィードバックをかける。
以上のように、本実施形態の駆動装置1は、高調発生器3の出力する電圧、ひいては、基本波発生器12の出力と重畳された、圧電素子2に印加される駆動電圧の波形を変化させることで、移動体4の移動速度を最大化する。
続いて、図7に、本発明の第2実施形態の駆動装置の回路構成を示す。本実施形態以降の説明においては、第1実施形態と同じ構成要素には同じ符号を付して重複する説明を省略する。本実施形態の駆動回路6は、周波数f1=2πωでデューティ比0.5の矩形波を出力する公知のブリッジ回路である基本波ブリッジ回路17と、周波数f1の倍の周波数f2=4πωでデューティ比0.5の矩形波を出力する公知のブリッジ回路からなる高調波ブリッジ回路18とからなる。
本実施形態の制御装置8は、基本波ブリッジ回路17および高調波ブリッジ回路18のスイッチング素子のオン/オフを制御する制御信号を出力する。そして、DSP16から入力される基本波成分と2次高調波成分との位相差が駆動方向に応じて、0°または180°のいずれかになるように、基本波ブリッジ回路17を駆動する制御信号と、高調波ブリッジ回路18を駆動する制御信号との位相を変化させる。
なお、理想的な矩形波は、2次高調波成分を含まないので、本実施形態のように、基本周波数f1の矩形波と、基本周波数の倍の周波数f2の矩形波とを重畳して印加することで、圧電素子2に印加される駆動電圧の基本波成分と2次高調波成分との位相を独立して調整できる。なお、3次以上の高調波成分も、誘導電荷Qの波形に寄与するが、その構成比が小さいため、基本波成分と2次高調波成分とだけを指標として駆動電圧波形を調整すればよい。
本実施形態では、誘導電荷Qの基本波成分と2次高調波成分との振幅比を調整することはできないが、誘導電荷Qの基本波成分と2次高調波成分との位相差を調整することで、ある程度駆動効率を改善できる。特に、圧電素子2の弾性などによる振動特性の遅れにバラツキがある場合は、この位相差の調整による駆動効率の改善が有効である。また、基本波ブリッジ回路17および高調波ブリッジ回路18の電源電圧を調整可能とすれば、誘導電荷Qの基本波成分と2次高調波成分との振幅比を調整することも可能になる。
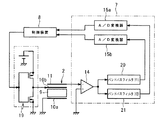
さらに、図8に、本発明の第3実施形態の駆動装置の回路構成を示す。本実施形態の駆動回路6は、1つの公知のブリッジ回路19のみからなる。
また、本実施形態の検出回路7は、駆動電圧の基本周波数f1=2πωの近傍の周波数帯域のみを通過させる基本波バンドパスフィルタ20と、基本周波数f1の倍の周波数f2=4πωの近傍の周波数帯域のみを通過させる高調波バンドパスフィルタ21とが並列に接続され、それぞれに、電流−電圧変換器14の出力が入力されるようになっている。さらに、検出回路7は、基本波バンドパスフィルタ20を通過した電圧の実行値をディジタル信号に変換するA/D変換器15aと、高調波バンドパスフィルタ21を通過した電圧の実行値をディジタル信号に変換するA/D変換器15bとを有する。つまり、本実施形態の検出回路7は、誘導電荷Qの基本波成分に比例するディジタル値と、誘導電荷Qの2次高調波成分に比例するディジタル値とを制御装置8に入力する。
本実施形態では、制御装置8は、ブリッジ回路19のスイッチング素子をオン/オフする周波数f1=2πωの制御信号のデューティ比を、誘導電荷Qの基本波成分の振幅と2次高調波成分の振幅との比が4に近付くように、つまり、充電電流Iの基本周波数成分と2次高調波成分との比が2になるように調整する。
理想的な矩形波の高調波成分は、デューティ比0.5のときに最大になり、デューティ比が0.5から離れるほど小さくなる。このため、本実施形態のように、駆動電圧のデューティ比を変化させることでも、駆動電圧の基本波成分と2次高調波成分との比を変化させて、アクチュエータ5の駆動効率を改善できる。
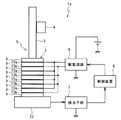
さらに、図9に、本発明の第4実施形態の駆動装置の構成を示す。本実施形態のアクチュエータ5は、圧電素子2の、駆動軸3と反対側の端部に例えばタングステン合金からなる導電性の錘22が固定されている。この錘22は、対向電極10bに圧電層9を介して対向するように配設されており、検出電極を兼ねている。
錘22は、圧電アクチュエータ5の重心を錘22側に位置させ、これによって、圧電素子2の伸縮の中心点を錘22に近づけることで、駆動軸3を安定して振動させるために用いられ、このような錘22の使用は公知である。よって、導電性の錘22を検出電極としても用いることで、検出電極を設けた特殊な圧電素子を用意する必要がなく、コストが削減できる。
なお、以上の実施形態では、圧電素子2が1つの検出電極を有する例のみを説明したが、対向電極10a,10bにそれぞれ圧電層9を介して対向する検出電極の誘導電荷量の差分、または、2つの検出電極の間に流れる電流を検出してもよい。
1…駆動装置
2…圧電素子
3…駆動軸
4…移動体
5…圧電アクチュエータ
6…駆動回路
7…検出回路
8…制御装置
9…圧電層
10a,10b…対向電極
11…検出電極
12…基本波発生器
13…高調波発生器
14…電流−電圧変換器
15…A/Dコンバータ
16…DSP
17…基本波ブリッジ回路
18…高調波ブリッジ回路
19…ブリッジ回路
20…基本波バンドパスフィルタ
21…高調波バンドパスフィルタ
22…錘(兼検出電極)
2…圧電素子
3…駆動軸
4…移動体
5…圧電アクチュエータ
6…駆動回路
7…検出回路
8…制御装置
9…圧電層
10a,10b…対向電極
11…検出電極
12…基本波発生器
13…高調波発生器
14…電流−電圧変換器
15…A/Dコンバータ
16…DSP
17…基本波ブリッジ回路
18…高調波ブリッジ回路
19…ブリッジ回路
20…基本波バンドパスフィルタ
21…高調波バンドパスフィルタ
22…錘(兼検出電極)
Claims (9)
- 伸縮に応じて電荷が誘導される検出電極を備える圧電素子と、前記圧電素子に一端が固定された駆動軸と、前記駆動軸に摩擦係合する移動部材と、前記圧電素子に周期的な駆動電圧を印加可能な駆動回路と、前記検出電極の誘導電荷の変化の基本周波数成分と第2次高調波成分とを求める検出回路と、前記誘導電荷の変化の基本周波数成分および第2次高調波成分に応じて前記駆動回路を制御し、前記駆動電圧の波形を変化させる制御装置とを有することを特徴とする駆動装置。
- 前記検出回路は、前記誘導電荷を示す変量をフーリエ解析することを特徴とする請求項1に記載の駆動装置。
- 前記検出回路は、前記駆動電圧の基本周波数と同じ周波数成分を抽出する基本波フィルタと、前記駆動電圧の基本周波数の2倍の2次高調波成分を抽出する高調波フィルタとを有することを特徴とする請求項1に記載の駆動装置。
- 前記検出回路は、前記検出電極に流れ込む電流を電圧信号に変換する変換器を有することを特徴とする請求項1から3のいずれかに記載の駆動装置。
- 前記制御装置は、前記誘導電荷の基本周波数成分の振幅が第2次高調波成分の振幅の4倍になるように、前記駆動電圧の基本周波成分および第2次高調波成分の少なくともいずれかの振幅を調整することを特徴とする請求項1から4のいずれかに記載の駆動装置。
- 前記制御装置は、前記誘導電荷の基本周波数成分と第2次高調波成分との位相差が0°または180°になるように、前記駆動電圧の基本周波成分および第2次高調波成分の少なくともいずれかの位相を調整することを特徴とする請求項1から5のいずれかに記載の駆動装置。
- 前記駆動電圧は、前記誘導電荷の基本周波数と同じ周波数のデューティ比0.5の矩形波と、前記誘導電荷の基本周波数の2倍の周波数のデューティ比0.5の矩形波とからなることを特徴とする請求項1から6のいずれかに記載の駆動装置。
- 前記駆動電圧は、前記誘導電荷の基本周波数と同じ周波数の矩形波であって、
前記制御装置は、前記駆動電圧のデューティ比を変化させることを特徴とする請求項1から6のいずれかに記載の駆動装置。 - 前記検出電極は、前記圧電素子の前記駆動軸と反対側の端部に固定された錘であることを特徴とする請求項1から8のいずれかに記載の駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008133253A JP2009284635A (ja) | 2008-05-21 | 2008-05-21 | 駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008133253A JP2009284635A (ja) | 2008-05-21 | 2008-05-21 | 駆動装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009284635A true JP2009284635A (ja) | 2009-12-03 |
Family
ID=41454486
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008133253A Pending JP2009284635A (ja) | 2008-05-21 | 2008-05-21 | 駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009284635A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013172512A (ja) * | 2012-02-20 | 2013-09-02 | Seiko Epson Corp | 圧電アクチュエーター及び電子機器 |
| CN103346692A (zh) * | 2013-07-02 | 2013-10-09 | 南京航空航天大学 | 振动主动控制中压电作动器迟滞非线性频域补偿方法 |
| CN104034249A (zh) * | 2014-06-26 | 2014-09-10 | 浙江大学 | 一种自校准的变面积电容检测方法 |
| US9087976B2 (en) | 2010-06-02 | 2015-07-21 | Funai Electric Co., Ltd. | Ultrasonic-motor-driving device and ultrasonic motor unit |
| CN105846712A (zh) * | 2016-04-26 | 2016-08-10 | 南京理工大学 | 基于感应电荷反馈的压电驱动电源及控制方法 |
-
2008
- 2008-05-21 JP JP2008133253A patent/JP2009284635A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9087976B2 (en) | 2010-06-02 | 2015-07-21 | Funai Electric Co., Ltd. | Ultrasonic-motor-driving device and ultrasonic motor unit |
| JP2013172512A (ja) * | 2012-02-20 | 2013-09-02 | Seiko Epson Corp | 圧電アクチュエーター及び電子機器 |
| CN103346692A (zh) * | 2013-07-02 | 2013-10-09 | 南京航空航天大学 | 振动主动控制中压电作动器迟滞非线性频域补偿方法 |
| CN104034249A (zh) * | 2014-06-26 | 2014-09-10 | 浙江大学 | 一种自校准的变面积电容检测方法 |
| CN105846712A (zh) * | 2016-04-26 | 2016-08-10 | 南京理工大学 | 基于感应电荷反馈的压电驱动电源及控制方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6103654B2 (ja) | Ac側短絡機能を有する整流器回路、及び誘電子変換器における同期スイッチハーベスティング | |
| US8773004B2 (en) | Circuit for optimizing the recovery of vibratory energy by a mechanical/electrical converter | |
| US10784041B2 (en) | Electromagnetic power converter | |
| US10693394B2 (en) | Driving apparatus of vibration-type actuator method of controlling driving vibration-type actuator and image pickup apparatus | |
| US20110121686A1 (en) | Driving circuit for vibration-type actuator | |
| US11728750B2 (en) | Vibration actuator having plural vibrators and inductors | |
| JP2015233399A (ja) | 振動型駆動装置、振動型駆動装置を備える交換用レンズ、撮像装置、及び振動型駆動装置の調整方法 | |
| JP2009284635A (ja) | 駆動装置 | |
| JP5037767B2 (ja) | 振動型アクチュエータの制御装置 | |
| JP2018078769A (ja) | 振動型アクチュエータの制御方法、振動型駆動装置及び電子機器 | |
| US20130257223A1 (en) | Controlling device for vibration type actuator | |
| US6448694B2 (en) | Actuator and driving method thereof | |
| JP5833658B2 (ja) | 超音波モータのためのアクチュエータを電気的に励起する方法及び装置 | |
| US6713943B1 (en) | Actuator and driving method thereof | |
| JP6101983B2 (ja) | 発電回路およびこれを用いた発信装置 | |
| JP5930152B2 (ja) | 発電装置、電子機器、移動手段および発電装置の制御方法 | |
| US11588417B2 (en) | Vibration actuator and driving device for vibration actuator | |
| JP4110153B2 (ja) | 振動型アクチュエータの駆動装置および振動型アクチュエータの駆動方法 | |
| JP5972026B2 (ja) | 振動型アクチュエータの振動検出装置及び制御装置 | |
| US20130063054A1 (en) | Driving apparatus for vibration-type actuator | |
| JP2008236834A (ja) | 超音波モータの駆動装置およびその方法 | |
| JP2025183676A (ja) | 制御装置及びプログラム | |
| JP2025110306A (ja) | 振動型アクチュエータの制御装置 | |
| JPS61224879A (ja) | 表面波モ−タ−の駆動回路 | |
| JP2010263672A (ja) | 振動型駆動装置および振動型駆動装置の制御方法 |