JP4129302B2 - スキャナ - Google Patents
スキャナ Download PDFInfo
- Publication number
- JP4129302B2 JP4129302B2 JP02604797A JP2604797A JP4129302B2 JP 4129302 B2 JP4129302 B2 JP 4129302B2 JP 02604797 A JP02604797 A JP 02604797A JP 2604797 A JP2604797 A JP 2604797A JP 4129302 B2 JP4129302 B2 JP 4129302B2
- Authority
- JP
- Japan
- Prior art keywords
- scanner
- distance
- laser beam
- optical information
- range
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K7/00—Methods or arrangements for sensing record carriers, e.g. for reading patterns
- G06K7/10—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation
- G06K7/10544—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation by scanning of the records by radiation in the optical part of the electromagnetic spectrum
- G06K7/10792—Special measures in relation to the object to be scanned
- G06K7/10801—Multidistance reading
- G06K7/10811—Focalisation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K2207/00—Other aspects
- G06K2207/1013—Multi-focal
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S359/00—Optical: systems and elements
- Y10S359/90—Methods
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Electromagnetism (AREA)
- General Physics & Mathematics (AREA)
- Toxicology (AREA)
- General Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Health & Medical Sciences (AREA)
- Theoretical Computer Science (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Measurement Of Optical Distance (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Facsimile Scanning Arrangements (AREA)
- Mechanical Treatment Of Semiconductor (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
【発明の属する技術分野】
本発明は、請求項1の前提部分に記載の、光学的情報、特にバーコードを読取る為のスキャナに関するものである。
【0002】
【従来の技術】
このタイプのスキャナは公知である。スキャナは、光学的情報を含む対象物を識別する為に用いられる。ここで議論されるスキャナは、その光線が適切な偏向装置、特に多角形ミラーにより走査される表面上に誘導されるレーザー装置を持つものに限定することとする。ここで議論されるスキャナは、偏向装置から大幅に変化する距離で、例えば約1mの範囲で変化する距離を隔てて配列される大きな表面を走査するのに用いられる。単独のレーザーの走査深度(読取り範囲)は、約30cmから40cmに過ぎない。従って、このタイプのスキャナにより、約1mの読取り範囲をカバーすることが必要であれば、レーザー装置は、夫々が約30cmの走査深度(範囲)を持ち、しかも読取り又は深度の範囲が互いに補完し合うことにより、全領域が約1mになる如く調整されている3つのレーザー光源を包含せねばならない。この場合に、例えば第1レーザー光源は0cmから40cmの第1の読取り又は走査範囲をカバーし、第2レーザー光源は、30cmから70cmの第2の走査領域をカバーし、かつ第3のレーザー光源は、約60cmから100cmの第3の走査領域をカバーする。実際には、あらゆるケースに於いて信号にエラーの生じることを防止する為に、個別のレーザー光源の領域を幾らかオーバーラップすることの望ましいことが証明されている。
【0003】
【発明が解決しようとする課題】
ここで議論されるタイプのスキャナで、その偏向装置が多角形ミラーを持ち、その互いに隣合う反射面が、特定のレーザー光源に割り当てられているスキャナ、即ち、スキャナは、或るレーザーに割り当てられている反射面には必ずそのレーザー光線のみが入射するようにコントロールされるスキャナは公知である。或る対象物が特定の読取り又は距離範囲に於いて走査されるとき、この距離範囲に割り当てられたレーザー光源が駆動され、そのレーザー光線に割り当てられた反射面が、レーザー光線で走査すべき対象物の表面上に誘導される位置に来る迄、待つことが必要である。反射面が時間的に間断なく現れ、レーザー光源の切換えが迅速な場合ですら、該当の光源から特定の距離を隔てて対象物を走査することが可能になる迄は待時間が生じる。この結果、走査されるべき対象物がスキャナの前を通過するときの速度が制約されることとなる。このように速度が遅くなることは、対象物の自動走査の場合には特に不利となる、何故ならば走査速度は、対象物が搬送される速度によって決まるからである。
【0004】
この欠点を解消する為に、2つ以上のレーザー光源を持つ上記タイプのスキャナに、走査される可き対象物からの距離を計測して、該当するコントロール信号を発する測定装置を備えることが提案された。このコントロール信号を用いることにより、対象物の検出に続いて、直ちに対象物の距離に適合するレーザー光源が駆動される。更にすべてのレーザー光源からの光が、多角形ミラーを備えた反射装置の何れの反射面にも入射することが出来る仕組みになっている。
【0005】
このタイプのスキャナは、一つのレーザーの走査範囲の深度(読取り範囲)を上回る距離範囲内に在る対象物上の情報を光学的に読取る為には、多数のレーザー光源を設ける必要があるという欠点を伴う。従ってこのタイプのスキャナは、比較的高価であり、しかも大きなスペースを必要とする為に、自動読取りシステムは、更に高価なものとなる。
【0006】
従って本発明の目的は、一つのレーザー光源の走査深度を上回る読取り範囲、又は距離範囲内に在る対象物を走査する為に使用することの出来る、小型で、光学的情報、特にバーコードを読取る為のスキャナを提供することに在る。
【0007】
【課題を解決するための手段】
上記目的は、冒頭に述べたタイプのスキャナの場合には、請求項1に記載の構成を用いることにより果たされる。スキャナが、測定装置のコントロール信号を受信して、スキャナを対象物の走査表面からの距離に適合させる結像装置(focusing device) を持つことによって、スキャナのレーザー装置の光源は一つで済ますことが出来る。従ってこのタイプのスキャナは、比較的小型でありながら、対象物の表面を走査することの出来る範囲は、この光源の走査深度よりも大きくなる。走査可能な距離範囲は、このタイプの結像装置を持たぬレーザー光源の読取り走査深度よりもはるかに大きくできる。
【0008】
前記結像装置が機械的駆動手段を持つスキャナの実施形態は、特に好ましいものである。このタイプの結像装置は、それの必要とするスペースが特に小さく、測定装置のコントロール信号に迅速に応答し、比較的低コストで実現できる。
【0009】
好ましくは、更にその結像装置が、前記機械的駆動手段として用いられる圧電素子(piezoelectric element) を持つ。圧電結晶(piezoelectric crystal) は、特に小型であり、従って、前記コントロール信号に極めて迅速に応答することが出来る。このタイプの結像装置の慢性質量は極めて小さい。
その他の改良点は、従属請求項から知ることが出来る。
【0010】
【発明の実施の形態】
発明は次に図面を参照して詳述される。
図1は、レーザー装置3を持つスキャナ1を示す。前記レーザー装置3からは、レーザー光線5が発せられて偏向装置7に入射する。偏向装置7は、この場合には回転する多角形ミラー9を持つ。レーザー光線5は、反射表面11により偏向する。多角形ミラー9が時計方向に回転する時には、反射表面11により反射される光線は同様に時計方向に旋回(回転)運動を行う。この状態は、実線により示された光線5aおよび破線により示された光線5bにより、明らかである。レーザー光線5は、記録すべき対象物13に向けて発せられ、この対象物13上には光学的に読取ることの出来る情報が、例えばバーコード15の形で設けられている。
【0011】
バーコード15から反射される光は、反射面11に当たると同時に、この面により偏向ミラー17に向けて反射される。ミラー17は、レーザー装置3から発射される光を通す開口19を持つ。対象物13の表面から反射される光は、偏向ミラー17から直接、レンズ21を持つ光学システムを経て、受光装置23に入る(反射光25)。受光装置23は、光信号を電気信号に変える。この電気信号は、測定装置27の中で、公知のレーザー変位計の原理に基づいて処理され、スキャナ1と走査されるべき対象物13との間の距離として記録された上、コントロール信号としてライン29を経て結像装置31に送られる。
【0012】
結像装置31は、機械的駆動装置35を持ち、これによりレーザー光線5の結像が操作される。
【0013】
スキャナ1は、レーザー装置3が備えるレーザー光源37が一つのみであることをその特徴としている。この事実は、レーザー装置3が極めてコンパクトで所要スペースの少ない構造を持つことを意味する。
【0014】
以下、スキャナ1の動作を中心として説明する。
レーザー光線5は、対象物13上の光学的情報、特にバーコード15を光学的に読取る為に、レーザー装置3、つまりレーザー光源37より発せられる。レーザー光線5は、結像装置31を経て、偏向ミラー17の開口19を通り、偏向装置7の反射面11に達する。多角形のミラー9の回転運動の為に、反射面11により反射される光線は、走査されるべき対象物13の表面を、つまりバーコード15の上を掃引する。対象物13の走査表面が長いので、偏向ミラー9から走査表面までの距離が大きく変化する。対象物13の表面から反射される光は、反射面11および偏向ミラー17を経て、レンズ21を通過し、受光装置23および測定装置27に入る。測定装置27は、この時、スキャナ1と対象物13との間の距離を検出して記録する。結像装置31は、ライン29を通るコントロール信号により、対象物13から反射される光が受光装置23上に鮮明に映るように、例えばバーコード15の黒色部分と白色部分のコントラストの差が最大となるように調節される。
【0015】
結像装置31は、駆動装置35が機械的な構造であり、従って測定装置27のコントロール信号に極めて迅速に応答出来る。
【0016】
図2は、駆動装置35として、圧電素子39を備えている結像装置31の第1実施形態を示す。圧電素子39は、一方側が定置支持体41に固定的に連結され、他方側が反射エレメント43に接続される。反射エレメント43は、レーザー光源37から発射されるレーザー光線5の当たる反射面45が湾曲している。レーザー光線5は、湾曲面45により結像し、その際の焦点距離は、表面45の曲率によって決まる。
【0017】
反射エレメント43は、圧電素子39のサイズが変化する時には、反射エレメント43と定置支持体41との間の距離が変化し、従って表面45の曲率半径が変化する。
【0018】
この明細書に図示されている実施形態に於いては、圧電素子39は支持体1の中の凹所47の中に嵌入し、凹所47の底部に固定されている。測定装置27から発生するコントロール電圧が、圧電素子39に印加されると、圧電素子39のサイズが変化する。凹所47の底面とは反対側に在るピエゾ電気結晶の表面は、底面からの距離を変化させる。反射エレメント43は、凹所47の底とは反対のピエゾ電気結晶の側に固定されており、反射エレメント43は、少なくとも外周の領域に於いて、支持体41における凹所47を囲む支持表面49に設置されている。凹所47の中の空間を横切る反射エレメント43の領域は、圧電素子39における凹所47の底部とは反対の側に接続されている。
【0019】
圧電素子39の寸法が、測定装置27から印加される電圧によって変化する時には、柔軟な(高い弾性を持つ)反射エレメント43は、大なり小なり凹所47の中に引き込まれ、その結果、反射面45の曲率半径が変化する。これがレーザー光線5の焦点を変化させる。
【0020】
反射エレメント43は、圧電素子39が反射エレメント43の弾性変形をもたらす力を発生しない時には、元の位置に戻るように設定されている。
【0021】
反射エレメント43がこのように配置されているので、反射エレメント43を設定された基本位置に戻す為の回復装置は不要である。
【0022】
図3は、結像装置31の別の実施形態を示す。この例に於いては、定置レンズ51と可動レンズ53とから成るレンズシステムを持つ。定置レンズ51は適切な、定置支持体55により保持される。可動レンズ53は、圧電素子39に接続されている。
【0023】
可動レンズ53を支持するエレメント39は、定置支持体57に固定的に支持されている。この実施形態に於いては、圧電素子39は、側面から見た場合に矩型の構造を持つ。圧電素子は、そのベース面59が定置支持体57上に載置され、前記ベース面59と、反対側のレンズ界面61上に可動レンズ53が取付けられている。コントロール電圧が、測定装置27により、圧電素子39に印加されると、レンズ界面61とベース面59との間の距離が変化する。この結果、レーザー光源37の光の進路に入れられた可動レンズ53が移動して、焦点合わせ(結像)がなされる。
【0024】
可動レンズ53が固定される領域に於いて、圧電素子には開口が設けられており、これを通してレーザー光源37から発せられる光が、レンズ53に達し、ここからレンズ51を経て走査されるべきバーコードに到達する。
【0025】
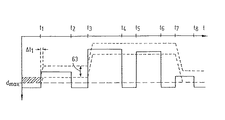
結像の方法を図4に基づいて詳述する。レーザー光線を受ける受光装置23と走査されるバーコード15との間の距離dは、図4に於いて時間tに対比してプロットされている。バーコードをスキャナ1によって読み取るべき最大距離dmaxは、破線により示されている。スキャナの読み取り範囲は、2つの破線と両方向矢印63により示されている。
【0026】
時点t1迄は、スキャナからの距離がdmaxより大きい位置に在る表面が記録される。
【0027】
t1とt2との間では、dmaxより小さいスキャナからの距離に在る表面を持つ第1対象物が記録される。
【0028】
t2とt3との間では、スキャナの読取り可能範囲内には対象物は存在しない。
【0029】
t3とt4との間には、t1からt2の間に記録された対象物の表面より遥かにスキャナに近い表面を持つ第2対象物が記録される。
【0030】
第3の対象物は、t5とt6との間に記録される。最後にt7からt8に於いて、上述の対象物よりもスキャナからの距離が著しく大きい位置にある別の対象物が記録される。
【0031】
t1迄はスキャナは、最大距離に設定されている為に、その読取り範囲は、最大距離dmaxにより設定される。
【0032】
t1迄の、スキャナが或る対象物の表面を記録することの出来るハッチングの入った読取り深度範囲は、最大読取り距離dmaxに隣接している。
【0033】
t1からt2の間に記録される対象物の表面は、この領域の外側に在る。測定装置27は、従ってコントロール信号を圧電素子39に送ることにより、読取り範囲を変化させる。2つの平行な点線により示された読取り範囲、又は走査深度範囲は、t1からt2の間に記録される対象物の表面が、この範囲内に収まるように設定される。
【0034】
読取り範囲は、t2以後は変化しない、何故ならばt2以後ではスキャナは、その最大の読取り範囲の外側にある距離でもって、一つの表面に対向して位置するからである。
【0035】
次の対象物のt3からt4までに記録される表面は、スキャナの最大距離の範囲内に在るが、その最大読取り範囲の外側にある。
【0036】
これに応じて結像装置31が駆動されて、読取り範囲が変化し、t3からt4の間に記録される表面がスキャナにより走査されて、この表面上のバーコードが読取られる。
【0037】
読取り範囲を変える為にコントロール信号が再び圧電素子39に送られ、反射エレメント43の表面45が変化するか、又は可動レンズ53の位置が変えられることにより、スキャナは、読取り範囲内の所望の表面を記録する。
【0038】
t4以後は、スキャナは再び或る表面、例えば最大読取り距離dmaxの外側に在る走査される可き対象物の支持体の上に位置する。従って、設定可能な読取り範囲内で記録される表面は存在しないから、結像装置31は変化しない。
【0039】
t5からt6に於いては、その前に設定された読取り範囲、又は走査深度内に再び入った表面が記録される。結像装置31は、従って変化しない。
【0040】
t6以後では、読取り範囲内、又は最大読取り距離dmax内で記録される表面が存在しない状態が再び出現する。結像装置31は、従って変化しない。
【0041】
最後にt7からt8の間では、最大読取り距離dmaxの中に在るが、以前に設定された読取り範囲の外に在る表面が記録される。従って、結像装置31が制御されて、走査すべき表面をその範囲内に含むように読取り範囲を作り出す。
【0042】
結像装置は、圧電素子の慣性質量が小さいことから極めて迅速に応答することが出来るので、読取り範囲は、走査されるべき表面が殆ど遅れることなくこの範囲の中に収まるように、極めて迅速に調節される。例えば読取り範囲は、時点t1以後に記録される表面が読取り範囲内に収まるように、△t1の時間内に調節される。結像システムの最大調節速度には限界があるので、結像が可能な時間領域△tは、走査されるべき表面が各時点の読取り範囲から外れている度合いにより変化する。
【0043】
図4に従って説明される読取り法および結像法に於いて、毎回走査することの出来る対象物は唯一つに限られている。
【0044】
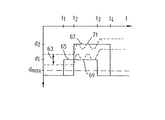
図5に於いて、多数の対象物が同時に走査される方法を説明する。
まずスキャナの読取り範囲内に在るすべての対象物の距離が記録され、それから最小読取り距離が求められる。図5のダイアグラムに於いて、2つの対象物、第1対象物とスキャナとの間の距離はd1で、第2の対象物とスキャナの間の距離はd2で、ぞれぞれ示されている。
【0045】
読取り距離は2つの対象物に対して決定される。
距離d1とd2の間の差異がスキャナの走査深度(読取り深度)の範囲よりも小さい場合、要求される読取り距離は、読取り距離d1とd2の平均値に設定される。
【0046】
2つの読取り距離の間の差異が、走査深度の範囲よりも大きい場合、結像装置は、一つの対象物の表面が、次に別の対象物の表面が、交互に読取り範囲内に入って走査出来るように設定される。図5からわかるように、結像装置は、記録される表面が読取り範囲の端と一致するように設定される。これにより結像装置の行う調節変位量は最小で済むことになる。
【0047】
図5は、単一の対象物の表面を記録する時に要求される読取り距離(所要走査距離、RSD)が読取り範囲63のほぼ中央に対象物表面が来るように選ばれていることを示す。これは、図5に於いてt1からt2の間に示されている。
【0048】
この点に関して、図4の見方を変えると、t1からt2の間の読取り範囲は、同様に、走査される対象物表面が読取り範囲の中央に位置するようにセットされていることが判る。このような設定は、又t3からt4の間に走査される対象物に対しても行われ、その表面を読取り範囲の中央に位置させる。t5からt6の間に走査される次の対象物の表面は、結像装置が駆動されていないから、読取り範囲の中心からずれて位置する。結像装置の駆動が必要でないのは、その時に記録されている対象物の表面が、尚読取り範囲内に在るからである。
【0049】
t7からt8の間に記録される対象物は、新たに読取り範囲の設定を必要とする。この場合には、走査される表面は、読取り範囲の中央に位置することが再び保障される。
【0050】
図5に於いては、t2の時点からt3の時点迄は、2つの対象物が、破線により示された値dmaxを限界とするスキャナの読取り範囲内に在る。t2からt3の間では、対象物の走査されるべき2つの表面65および67は、t1からt2に在った二重矢63により示され、かつ破線により限界を定められている読取り範囲内にはもはや存在しないので、結像装置31は、時点t2から始まり、一方で第1対象物の表面65を、他方で第2対象物の表面67を、それぞれ走査出来るように、精度よく駆動される。図5に示された方法では、読取り範囲は、第1対象物の表面65が時として読取り範囲の下限69に一致し、又時として第2対象物の表面67が、読取り範囲の上限71に一致するように調節される。
【0051】
時点t3に到達すると、走査深度は、第2対象物の表面67が読取り範囲のほぼ中央に位置するように設定される。この時点以後は、唯一つの表面のみがスキャナの走査範囲内に存在するから、結像装置を更に駆動することは、もはや不要である。
【0052】
このように一つ以上の対象物が記録された直後にスキャナ1を対象物13からの距離に設定し、対象物およびその上のバーコード15を鮮明に映し出すことが可能である。結像装置31の結像速度が大である為に、単独レーザー光源37を持つレーザー装置3を備えることで充分である。異なった読取り範囲、又は距離範囲に於いて対象物13を走査することの出来るレーザー光源を追加することは、不必要である。結像装置31は、一つ以上の数の対象物が記録された直後に、焦点位置を変えることで、単一レーザー光源37を正しい距離に設定し、これにより、バーコード15は、高い信頼性の下で、事実上誤差なく読取ることが出来る。
【0053】
この場合に用いられる機械的駆動装置35は、コントロール信号に基づいて寸法が変化する圧電素子又は圧電結晶であり、これによって、反射される光25を受光装置23に確実に結像させる。
【0054】
機械的駆動装置35は、あらゆる場合にそれが測定装置27のコントロール信号に極めて迅速に応答し、バーコード15が受光装置23上に鮮明に映し出されることを保障する点で優れている。従ってレーザー光源の追加を省略することが可能である。このようにして単一のレーザー光源の読取り範囲よりもはるかに大きい距離範囲の中で対象物13を記録することが可能となる。
【0055】
【発明の効果】
以上述べたとおり、本発明のスキャナは、測定装置のコントロール信号を受信して、スキャナを対象物の走査表面からの距離に適合させる結像装置を持つから、スキャナのレーザー装置の光源は一つで済ますことが出来る。従ってこのタイプのスキャナは、比較的小型でありながら、対象物の表面を走査することの出来る範囲は、この光源の走査深度よりもはるかに大きくなる。
【図面の簡単な説明】
【図1】スキャナの概略構成図である。
【図2】第1実施形態に係るスキャナの結像装置を示す概略構成図である。
【図3】第2実施形態に係るスキャナの結像装置を示す概略構成図である。
【図4】スキャナの動作を説明する第1の特性図である。
【図5】スキャナの動作を説明する第2の特性図である。
【符号の説明】
1…スキャナ、3…レーザ装置、7…偏向装置、13…対象物、15…バーコード、23…受光装置、27…測定装置、31…結像装置、37…レーザ光源、39…圧電素子
Claims (14)
- 光学的情報を読取るスキャナ(1)であって、
レーザー光線(5)を発射するレーザー光源(37)を有するレーザー装置(3)および対象物(13)の前記光学的情報を持つ表面から反射されるレーザー光(25)を検出する受光装置(23)を備えた、対象物(13)の前記表面上の前記光学的情報を読取る手段と、
対象物(13)の前記表面からスキャナ(1)までの距離を測定する、測定装置(27)を含む手段と、
前記測定された距離に従って前記対象物(13)に当たる発射レーザー光線(5)を結像させる結像装置(31)と、
を備えたスキャナ(1)において、
前記距離を測定する手段が、前記光学的情報を読取る手段と同一のレーザー光源(37)を備えることを特徴とするスキャナ(1)。 - 請求項1において、結像装置(31)が機械的アクチュエータを有することを特徴とするスキャナ(1)。
- 請求項2において、機械的アクチュエータ(35)が圧電素子(39)を備えることを特徴とするスキャナ(1)。
- 請求項3において、前記結像装置(31)が、前記発射されたレーザー光線(5)の進路の中に入れられて圧電素子(39)により移動されるように取り付けられた少なくとも1つのレンズ(53)を備えるスキャナ(1)。
- 請求項4において、前記少なくとも1つのレンズ(53)が前記圧電素子(39)に直接接続されていることを特徴とするスキャナ(1)。
- 請求項1または2において、前記結像装置(31)が少なくとも1つの可動レンズを備えることを特徴とするスキャナ(1)。
- 請求項4から6のいずれか一項において、前記結像装置(31)がさらに少なくとも1つの定置レンズ(51)を備えることを特徴とするスキャナ(1)。
- 請求項1または2において、前記結像装置(31)が、高弾性で反射性を持ち、かつ曲率半径が可変な湾曲面(45)を有する反射エレメント(43)を備えることを特徴とするスキャナ(1)。
- 走査範囲の所定の深度を持つスキャナ(1)により、少なくとも1つの対象物(13)上の光学的情報を読取る方法であって、
a)前記少なくとも1つの対象物(13)の前記光学的情報を持つ表面に向けてレーザー光線(5)を発射するステップと、
b)前記少なくとも1つの対象物(13)の前記表面から反射されるレーザー光線(25)を検出して、前記光学的情報を読取るステップと、
c)前記少なくとも1つの対象物(13)の前記表面から前記スキャナ(1)までの距離を測定するステップと、
d)前記測定された距離に従って前記対象物(13)に当たる発射レーザー光線(5)を結像させるステップと、
を備えた方法において、
前記ステップc)で測定される前記距離が、前記ステップb)で検出された前記レーザー光線に基づいて測定されることを特徴とする方法。 - 請求項9において、さらに、
e)前記光学的情報を読取るために、最大距離範囲(dmax)を設定するステップと、
c1)前記少なくとも1つの対象物(13)の第2の表面から前記スキャナ(1)までの第2の距離を測定するステップと、
d1)前記ステップc1)で測定された前記第2の距離が、前記最大距離範囲(dmax)内に在り、かつ前記ステップd)で結像した前記レーザー光線の走査範囲の深度の外側に在る場合、前記第2の距離に基づいて前記レーザー光線を結像させるステップと、
を備え、
前記ステップc1)で測定された前記第2の距離が、前記ステップd)で結像された前記レーザー光線の走査範囲の深度内に在るか、または前記最大距離範囲(dmax)の外側に在る場合、前記ステップd)の前記レーザー光線の結像状態を維持することを特徴とする方法。 - 請求項9において、前記ステップd)で、前記少なくとも1つの対象物(13)の前記表面が前記スキャナ(1)の走査範囲の深度のほぼ中央に位置するように、前記レーザー光線の結像を行うことを特徴とする方法。
- 請求項9において、
前記少なくとも1つの対象物が第1の対象物および第2の対象物からなり、
前記ステップc)が、前記第1対象物の表面から前記スキャナ(1)までの第1の距離(d1)および前記第2の対象物の表面から前記スキャナ(1)までの第2の距離(d2)を測定することを含み、
前記第1の距離(d1)と前記第2の距離(d2)間の差異が、前記スキャナ(1)の走査範囲の深度よりも大きいかどうかを確認するステップf)が、前記ステップd)の前に行われ、
前記ステップf)で否定的な結果が得られた場合、前記レーザー光線を結像させるステップd)は、前記スキャナ(1)の走査範囲の深度の中央が前記第1の距離(d1)と前記第2の距離との平均値にほぼ設定されるように行われることを特徴とする方法。 - 請求項12において、前記ステップf)で肯定的な結果が得られた場合、前記ステップd)が、前記第1の対象物の表面および前記第2の対象物の表面が前記スキャナ(1)の走査範囲の深度内に交互に位置するように、前記レーザー光線のそれら2つの表面上への結像を交互に行うことを含むことを特徴とする方法。
- 請求項13において、前記ステップd)が、前記第1対象物の表面および前記第2対象物の表面が交互にスキャナ(1)の走査範囲の深度の対応する端と一致するように、前記レーザー光線のそれら2つの表面上への結像を交互に行うことを含むことを特徴とする方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE19603010 | 1996-01-27 | ||
| DE19603010 | 1996-01-27 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH09319817A JPH09319817A (ja) | 1997-12-12 |
| JP4129302B2 true JP4129302B2 (ja) | 2008-08-06 |
Family
ID=7783906
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP02604797A Expired - Fee Related JP4129302B2 (ja) | 1996-01-27 | 1997-01-24 | スキャナ |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US6049406A (ja) |
| EP (1) | EP0786734B1 (ja) |
| JP (1) | JP4129302B2 (ja) |
| AT (1) | ATE250782T1 (ja) |
| DE (1) | DE69725031T2 (ja) |
| ES (1) | ES2207703T3 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3112869B2 (ja) * | 1997-09-26 | 2000-11-27 | 米沢日本電気株式会社 | 中心位置検出機能を有するイメージスキャナ及びイメージスキャナの中心位置検出方法 |
| JP3186696B2 (ja) * | 1998-05-28 | 2001-07-11 | 日本電気株式会社 | 光学式記号読取装置 |
| US6634554B1 (en) * | 2000-02-23 | 2003-10-21 | Telxon Corporation | System and method employing a piezoelectric reflector for optimizing the focus of a dataform reader |
| DE10009493A1 (de) * | 2000-02-29 | 2001-08-30 | Sick Ag | Scanner |
| US6637655B1 (en) | 2000-06-08 | 2003-10-28 | Metrologic Instruments, Inc. | Automatic range adjustment techniques for stand-mountable bar code scanners |
| US6321988B1 (en) * | 2000-08-21 | 2001-11-27 | Telxon Corporation | Optical device employing a piezoelectric reflector array for increasing the resolution of a photosensor |
| DE10050368A1 (de) * | 2000-10-11 | 2002-04-18 | Sick Ag | Vorrichtung und Verfahren zur Erkennung von Codes |
| DE50104372D1 (de) * | 2000-11-13 | 2004-12-09 | Leuze Electronic Gmbh & Co | Optoelektronische Vorrichtung |
| DE10126086A1 (de) * | 2001-05-29 | 2002-12-05 | Sick Ag | Optoelektronischer Sensor |
| DE10209269C1 (de) * | 2002-03-01 | 2003-07-03 | Leuze Electronic Gmbh & Co | Optoelektronische Vorrichtung |
| EP2215583B1 (en) | 2007-11-12 | 2014-07-09 | Datalogic IP TECH S.r.l. | Optical code reader |
| CN101470799B (zh) * | 2007-12-28 | 2011-09-21 | 茂森科技股份有限公司 | 激光条码扫描器及其执行方法 |
| ITMI20140204U1 (it) | 2014-06-18 | 2015-12-18 | Datalogic IP Tech Srl | Dispositivo di acquisizione di informazioni ottiche |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5885415A (ja) * | 1981-11-17 | 1983-05-21 | Furukawa Electric Co Ltd:The | レンズ型光変調方式 |
| US4601539A (en) * | 1983-05-07 | 1986-07-22 | Canon Kabushiki Kaisha | Lens moving device using piezoelectric material |
| US4783155A (en) * | 1983-10-17 | 1988-11-08 | Canon Kabushiki Kaisha | Optical device with variably shaped optical surface and a method for varying the focal length |
| JPS6153603A (ja) * | 1984-08-24 | 1986-03-17 | Matsushita Electric Works Ltd | プラスチツクレンズ |
| US5170277A (en) * | 1988-05-11 | 1992-12-08 | Symbol Technologies, Inc. | Piezoelectric beam deflector |
| US4920255A (en) * | 1988-10-31 | 1990-04-24 | Stephen C. Gabeler | Automatic incremental focusing scanner system |
| JP2910253B2 (ja) * | 1991-01-09 | 1999-06-23 | 住友電気工業株式会社 | レーザビーム走査装置 |
| JP2751086B2 (ja) * | 1991-02-26 | 1998-05-18 | 株式会社テスコ | レンズ焦点距離の調節方式及び同方式を用いたバーコード読み取り方式 |
| EP0506410A3 (en) * | 1991-03-26 | 1993-09-01 | Kabushiki Kaisha Toshiba | Scanning optical apparatus |
| JPH06162249A (ja) * | 1992-09-28 | 1994-06-10 | Nippondenso Co Ltd | 光学情報読み取り装置 |
-
1997
- 1997-01-17 EP EP97200145A patent/EP0786734B1/en not_active Expired - Lifetime
- 1997-01-17 AT AT97200145T patent/ATE250782T1/de not_active IP Right Cessation
- 1997-01-17 DE DE69725031T patent/DE69725031T2/de not_active Expired - Lifetime
- 1997-01-17 ES ES97200145T patent/ES2207703T3/es not_active Expired - Lifetime
- 1997-01-24 JP JP02604797A patent/JP4129302B2/ja not_active Expired - Fee Related
- 1997-01-27 US US08/788,244 patent/US6049406A/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE69725031D1 (de) | 2003-10-30 |
| ES2207703T3 (es) | 2004-06-01 |
| ATE250782T1 (de) | 2003-10-15 |
| EP0786734B1 (en) | 2003-09-24 |
| US6049406A (en) | 2000-04-11 |
| EP0786734A3 (en) | 2000-01-19 |
| EP0786734A2 (en) | 1997-07-30 |
| JPH09319817A (ja) | 1997-12-12 |
| DE69725031T2 (de) | 2009-02-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US4831275A (en) | Method and means for self-referencing and self-focusing a bar-code reader | |
| JP4129302B2 (ja) | スキャナ | |
| US4178064A (en) | Real time grating clock for galvanometer scanners in laser scanning systems | |
| US6166375A (en) | Offset optical axes for bar code scanner | |
| JPH05505269A (ja) | 深フィールド型バーコードスキャナ | |
| EP0295863A2 (en) | Optical printer of scanning type | |
| US5177343A (en) | Symbol reader using differentiating circuit for light beam focusing | |
| JPH09146024A (ja) | 光学走査装置 | |
| US6278108B1 (en) | Synchronous light detector for optical scanning apparatus | |
| EP0420198B1 (en) | Beam scanning apparatus and apparatus for writing image information | |
| JP2822255B2 (ja) | 走査光学装置 | |
| KR100419219B1 (ko) | 프린터 및 그의 스캐닝장치 | |
| JPH08190066A (ja) | 光走査装置 | |
| JPH10177143A (ja) | 光走査装置 | |
| JPH10206766A (ja) | 光走査装置 | |
| JPH04245212A (ja) | レーザ記録装置 | |
| JPS62204221A (ja) | 光検出装置 | |
| KR20010027526A (ko) | 레이저 프린터 | |
| JPH10149427A (ja) | 光学走査装置及び光学情報読取装置並びに光学情報記録装置 | |
| JPH08220457A (ja) | 光走査装置 | |
| JPH03214279A (ja) | 記号読取装置 | |
| JPH10149426A (ja) | 光学走査装置及び光学情報読取装置並びに光学情報記録装置 | |
| JPH02266316A (ja) | 走査光学装置 | |
| JPH04204623A (ja) | 書き出し位置調整方法 | |
| JPH056415U (ja) | 走査光学系のミラー支持枠 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040120 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070417 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20070713 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20070719 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071015 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080422 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080519 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110523 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120523 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130523 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |