JP4090712B2 - 水中狭隘部移動システム - Google Patents
水中狭隘部移動システム Download PDFInfo
- Publication number
- JP4090712B2 JP4090712B2 JP2001231508A JP2001231508A JP4090712B2 JP 4090712 B2 JP4090712 B2 JP 4090712B2 JP 2001231508 A JP2001231508 A JP 2001231508A JP 2001231508 A JP2001231508 A JP 2001231508A JP 4090712 B2 JP4090712 B2 JP 4090712B2
- Authority
- JP
- Japan
- Prior art keywords
- movement
- moving device
- moving
- narrow part
- wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E30/00—Energy generation of nuclear origin
- Y02E30/30—Nuclear fission reactors
Landscapes
- Monitoring And Testing Of Nuclear Reactors (AREA)
Description
【発明の属する技術分野】
本発明は、水が満たされた装置内の点検、検査、予防保全および補修を行うための装置に係り、とくに装置内外の狭隘な箇所へ各種の装置や治工具の搬送、位置決め、保持および移動を行うための装置に関する。
【0002】
【従来の技術】
例えば原子炉、とくに沸騰水型原子炉の炉内構造物は、高温高圧環境下において十分な耐久性および高温での強度を有する材料、例えばオーステナイト・ステンレス鋼またはニッケル基合金によって構成されている。
【0003】
この炉内構造物のうち、交換困難な部材については、これらの部材が長期に及ぶプラントの運転によって厳しい環境に曝され、また、中性子照射の影響もあることから、材料劣化の問題が懸念される。特に、炉内構造物の溶接部近傍は、溶接入熱による材料の鋭敏化および引張り残留応力の影響で潜在的な応力腐食割れの危険性がある。
【0004】
炉心支持構造物であるシュラウド・サポートも同様の懸念があり、特に炉底部にあるシュラウド・サポートにおけるバッフルプレート下の部位(シュラウド・サポートレグ)、およびアニュラス部のジェットポンプ・アダプタ近傍を検査、補修、保全する必要がある。
【0005】
従来、原子炉圧力容器や炉内構造物各部の点検、検査、補修を行うために、各種装置や治工具を搭載して遊泳移動するか、または壁面に吸着しながら移動する装置が開発されている。すなわち、これらの装置により各種装置や治工具を搬送し、対象への位置を決め、その位置を保持するとともに微小な位置移動を行うものである。
【0006】
上述した炉下部のシュラウド・サポートレグやアニュラス部のジェットポンプ・アダプタ近傍といった狭隘な空間での点検、検査、補修などを行うためには、構成面で各種装置や治工具を搭載する移動装置を薄く小型にすることが必要であるし、また機能面で遊泳移動と対象壁面に接触しながら移動する壁面移動とが必要である。
【0007】
【発明が解決しようとする課題】
遊泳移動は3次元運動であるから最低3つのスラスタが、また壁面移動は2次元運動であるから最低2つの駆動源が必要となる。ただし、駆動源が多数になると移動装置の薄型化や小型化に支障を来たし、またケーブルが多芯とか複数本になると、移動時の負荷が大きくなるので移動性能が低下し、装置の信頼性も低下する等の不具合が生じる。
【0008】
そして、移動装置を薄く小型にしても、炉底部を点検、検査、補修するためには、事前準備として、炉心側からのアクセスでは、制御棒案内管の取り外し、またアニュラス部側からのアクセスでは、ジェットポンプのインレットミキサの取り外しといった作業が必要となり、多大な時間を要する。
【0009】
本発明は上述の点を考慮してなされたもので、壁面上の任意の位置へ移動する移動機能を持つ狭隘部移動装置をそなえた水中狭隘部移動システムを提供することを目的とする。
【0010】
上記目的達成のため、本発明では、請求項1記載の発明を提供するものである。
【0015】
請求項1記載の発明は、作業機器を搭載し、水が満たされた狭隘部内を移動し得る狭隘部移動装置と、前記狭隘部移動装置を出入りさせる開口部および前記狭隘部移動装置を保持する保持手段を有し、前記狭隘部移動装置に対する支援動作を行いつつ移動しうる支援装置とを備え、所要時に前記支援装置における前記保持手段による保持を解除し、前記開口部を介して前記狭隘部移動装置を出入りさせるよう構成される水中狭隘部移動システムにおいて、前記支援装置は、前記監視カメラを出し入れするためのケーブルの繰り出し、巻取りを行うケーブル巻取り機を有する水中狭隘部移動システム、を提供する。
【0020】
【発明の実施の形態】
以下、本発明の実施例および参考例につき、図面を参照して説明する。
【0021】
まず、図1および図2により本発明による水中狭隘部移動システムの作業対象箇所およびその近傍の構造物について説明する。図1は、沸騰水型原子炉の下部の横断面を示しており、ドーナツ状の原子炉圧力容器1とシュラウド胴3とがある。シュラウド胴3の内部には、炉内構造物を支えるための炉心支持板2が設置されている。原子炉圧力容器1とシュラウド胴3との間には、バッフルプレート4が溶接され、その上には、ジェットポンプ(図2)のディフューザ6bがそれぞれ周方向に複数設置されている。また、バッフルプレート4には、原子炉圧力容器1の直径方向上にある2箇所に、アクセスホール5a,5bが設けられている。
【0022】
図2は、沸騰水型原子炉の炉心の縦断面図を示しており、図1で示したように、原子炉圧力容器1とシュラウド胴2との間に、ジェットポンプ6が図示のように設置されている。このジェットポンプ6は、大きく分けてインレットミキサ6aとディフューザ6bとで構成されている。また、原子炉圧力容器1の下部には、シュラウド・サポート7を支えるためのシュラウド・サポートレグ8が溶接されている。
【0023】
この図2に示すように、狭隘部移動装置100を搭載した支援装置9は、電源ケーブル10および信号ケーブル11を伴い、原子炉圧力容器1の上方から遊泳移動しながらジェットポンプ6のインレットミキサ6aおよびディフューザ6bの横を通過して、バッフルプレート4に設けられたアクセスホール5a,5bの何れかに着座することができる。その後、狭隘部移動装置100を、支援装置9の下部から炉底部に送り出すことができる。すなわち支援装置9は、狭隘部移動装置100の搬送装置である。
【0024】
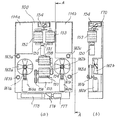
図3は、本発明の水中狭隘部移動システムの全体的構成の一例を示している。同図に示すように、狭隘部移動装置100、およびこの狭隘部移動装置100を内部に収納し移動する支援装置9を主たる構成要素とするものである。なお、支援装置9はケーブル10,11により制御統括システム12に接続されている。
【0025】
狭隘部移動装置100および支援装置9は、制御統括システム12の制御装置13および操作ボックス14により、作業員がモニター15を見ながら遠隔操作して移動させることができる。支援装置9は、4角の箱型状に形成され、上下移動用スラスタ16a,16bと、水平移動用スラスタ17a,17bとにより、水中を遊泳移動することができる。
【0026】
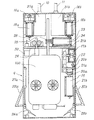
図4は、本発明の実施例における支援装置9の構成を示した正断面図である。この図4に示すように、支援装置9は、水中を遊泳移動するために、上下スラスタ16a,16bを駆動する駆動モータ18a,18bと、水平スラスタ17a(図示せず),17bを駆動する駆動モータ19bとを有する。
【0027】
そして、上下移動は、上下スラスタ16a,16bに直結された上下駆動モータ18a,18bを回転することにより行う。また水平移動は、水平駆動モータ19a(図示せず),19bに接続されたギア20a,20b、プーリ21a,タイミングベルト22を介してプーリ21bを回転させ、水平スラスト17a,17bを駆動することにより行う。以上の4つのスラスタで、炉内を自由に遊泳移動をすることができる。
【0028】
支援装置9の底部には、狭隘部移動装置100を収納する内部空間があり、この内部空間の上には、狭隘部移動装置100に結合されたケーブルの繰り出し、巻取りを行うためのケーブル巻取り装置23が配設されている。このケーブル巻取り装置23の駆動手段は、駆動モータ24、およびこの駆動モータ24の駆動軸に固定される溝付きプーリ25によって構成されている。
【0029】
この溝付きプーリ25は、図示しない他の溝付きプーリと対をなしており、これらの溝付きプーリで軽く押さえつつケーブルの繰り出し、巻取りを行う。また、駆動モータ24が万一故障した場合でも、原子炉圧力容器1の上部からケーブルを引き上げて、狭隘部移動装置100を支援装置9内に回収することができる。
【0030】
そして、支援装置9には、開口部を介して内部空間に回収した狭隘部移動装置100を保持する手段として、蝶番式扉26a,26bが配設されている。この蝶番式扉26a,26bは、エアシリンダ27a,27bを駆動することにより開閉される。このエアシリンダ27a,27bの駆動は、エアホース(図示せず)を通して制御装置13からエアを供給することにより行うことができる。
【0031】
さらに、支援装置9には、カメラ駆動装置28、監視カメラ29および水中ライト30が設けられており、狭隘部移動装置100の状態を制御統括システム12のモニター15で確認することができる。
【0032】
また、支援装置9内の上部には、支援装置9の水中バランスを維持するために、フロート31a,31bが配設されている。そして、支援装置9の外部に支援装置9をバッフルプレート4のアクセスホール5a,5bに位置決めするための位置決め手段として、位置決めガイド32a,32bがそれぞれ設けられている。
【0033】
図5は、支援装置9内における監視装置の構成を示す側面図である。監視装置は、カメラ駆動装置28および監視カメラ29で構成されている。カメラ駆動装置28は、駆動手段として、駆動モータ33と、この駆動モータ33の駆動軸に固定される溝付きプーリ34とを有し、この溝付きプーリ34は、図示しない他の溝付きプーリと対をなしており、これらの溝付きプーリで緩やかに押さえつつケーブルの繰り出し、巻取りを行う。
【0034】
このカメラ駆動装置28は、狭隘部移動装置100が、支援装置9から炉底部に繰り出された時に、監視カメラ29を支援装置9から炉底部に繰り出して、狭隘部移動装置100の状態を監視できるように構成されている。
【0035】
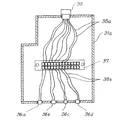
図6は、本発明の支援装置9におけるフロートの内部構成を示している。この図6は、フロート31aの縦断面図で、フロート31aには、操作ボックス14における制御装置13のケーブル11を取付けるための水中用コネクタ35と、支援装置9内部の各モータケーブルを取付けるための水中用コネクタ36a,36b,36c,36dとが設けられている。フロート31aの内部には、水中用コネクタ35、水中用コネクタ36a,36b,36c,36dに接続されるケーブル38a,38bおよび中継端子板37が設けられている。
【0036】
本実施例では、中継端子板37をフロート31a内に取付けたことにより、制御統括システム12の制御装置13からのケーブル10,11の本数を削減できる。よって、ケーブル10,11による支援装置9の移動時に与える負荷を軽減することができる。
【0037】
このように本実施例によれば、支援装置9が、狭隘部移動装置を搭載して水中を自由に遊泳移動できるため、事前準備であるジェットポンプのインレットミキサの取り外しをせずに、作業を効率的に行うことができる。
【0038】
次に、本発明の第1の参考例を図7に基づき説明する。
【0039】
まず、狭隘部移動装置100の具体的な構成について説明する。図7(a),(b)は、本参考例における狭隘部移動装置100(以下、単に移動装置100という。)の構成、形状を示す正面図、および一部側断面図である。この図7において、移動装置100は薄型に構成されており、筐体125内に各構成部材が配置されている。移動装置100の本体上部には、それぞれ上下スラスタ用モータ101a,101bにより駆動される上下移動用スラスタ102a,102bが配置されている。また移動装置100の本体下部には、水平スラスタ用モータ103a,103bが配置され、傘歯車とタイミングベルト104a,104bとを介して水平移動用スラスタ105a,105bを駆動する。
【0040】
そして移動装置100の本体中央には、車輪駆動モータ106a,106bと、これらのモータ106a,106bにより平歯車107a,107bを介して回転駆動される移動車輪108a,108bとが回転盤109a,109b上に設けられている。各回転盤109a,109bは、筐体125に対して回転可能に配置されており、各回転盤109a,109bは、ステアリングモータ110により、中間歯車111a,111bを介して同じ方向に回転駆動される。その回転角度は、ステアリングモータ110の出力軸と同じ歯車に噛み合って回転されるポテンショメータ112により計測される。
【0041】
回転盤109bの周縁部にはストライカ113が固定されており、回転盤109bの回転によるストライカ113の通過を、筐体125側に固定されたリミットスイッチ114により検出する。リミットスイッチ114の設置位置を、回転盤109bのある基準回転位置においてストライカ113を検出するように設定することで、移動車輪108a,108bの基準とする向きを定めることができる。装置本体の上部にはフロート120が配置されており、水中における装置本体の浮心を重心より上にすることができ、常に装置の姿勢を一定に保ちながら安定した遊泳移動をさせることできる。
【0042】
さらに、移動装置100の本体を水平移動用スラスタ105a,105bにより壁面へ押付けた時に、壁面との距離を一定に保つために4つのボールキャスタ130a〜130dが設けられている。
【0043】
移動装置100の本体下部には、点検作業を行うための水中カメラ175が設けられ、反射ミラー176により側方や下方の目視確認をすることができる。目視方向は、ミラー回転モータ177によって反射ミラー176を回転することにより、目視方向を変更、調整することができる。
【0044】
次に、本発明に係る狭隘部移動装置によりシュラウド・サポートレグ周りの溶接線検査を行う場合を例にして、装置の運用方法について説明する。
【0045】
まず移動装置100の本体に配置した4個のスラスタによって、シュラウド・サポートレグ8に向かって遊泳移動する。移動の仕方としては、炉内上部から上部格子板、炉心支持板を通過して当該箇所へ達する場合もあれば、途中経路の移動を迅速に行うために支援装置9内に収納されたままアクセスホール近傍に移送され、そこからシュラウド・サポートレグ8に向かって遊泳移動する場合もある。上下移動用スラスタ102a,102bにより浮上、潜行を行い、水平移動用スラスタ105a,105bにより前進、後進、左右旋回、その場旋回が可能であり、これら両者の動きを組み合わせることにより3次元遊泳移動を行うことができる。
【0046】
その後、シュラウド・サポートレグ8の検査対象箇所に、水平移動用スラスタ105a,105bにより装置本体を吸着させる。このスラスタ力が、シュラウド・サポートレグ8の壁面への押付け力となり、車輪回転時の走行駆動力となる。壁面に接触した後は、移動車輪108a,108bを車輪駆動モータ106a,106bにより回転駆動し、壁面上を移動する。
【0047】
移動方向は、ステアリングモータ110により回転盤109a,109bを回転させて移動車輪108a,108bの向きを変えることにより変更する。このように、車輪の回転駆動と車輪の向きを変えることによって壁面上の2次元移動が可能となる。水平、垂直のみでなく駆動方向を任意に設定することができる。この移動車輪が1つだけであると、壁面に接触した後に、ケーブル反力などを受けて装置全体が回転し搭載した各種装置や治工具の位置がずれてしまうが、車輪を2つにすることである程度のケーブル反力などに耐えることができ、装置の姿勢を保持することができる。
【0048】
このように本参考例によれば、上下移動用スラスタおよび水平移動用スラスタを組み合わせて作動させることにより、水中での3次元遊泳移動が可能である。また、炉内構造物に接触した後は、独立に回転駆動される2つの車輪を同時に、かつ同じ方向に向きを変えることができるので、精密な移動、位置決めを容易に実現することができる。その結果、炉下部のシュラウド・サポートレグやアニュラス部のジェットポンプ・アダプタ近傍の狭隘部などへ進入、移動し、溶接部の点検、検査、予防保全、補修といった各種作業を効率的に行うことが可能になる。
【0049】
図8および図9(a),(b)は、本発明の第2の参考例を示している。
【0050】
まず、狭隘部移動装置の具体的な構成について説明する。図8は、第2の参考例における狭隘部移動装置の構成、形状を示す正面図および一部側断面図である。この図8において、狭隘部移動装置は薄型に構成されており、筐体170に各構成部材が配置されている。上下移動用モータ150は、中間歯車151を介して上下移動用車輪152および上下移動用車輪153を回転駆動すると同時に、ギヤを介して上下移動用スラスタ154を回転駆動する。
【0051】
移動装置100の本体下部には、水平移動用モータ155が配置され、タイミングベルト156を介して水平移動用車輪157を回転駆動し、また中間歯車159を介して水平移動用車輪158を逆向きに回転駆動する。この水平移動用車輪157,158は、上下移動用車輪152,153と同じものである。移動装置100の本体下部両脇には、水平スラスタ用モータ160a,160bが配置され、傘歯車およびタイミングベルト161a,161bを介して水平移動用スラスタ162a,162bを回転駆動する。
【0052】
移動装置100の本体上部両脇には、フロート164a,164bが配置されており、水中における装置本体の浮心を重心より上にすることができるから、常に装置の姿勢を一定に保ちながら安定した遊泳移動ができる。
【0053】
さらに、移動装置100の本体を水平移動用スラスタ162a,162bにより壁面へ押付けた時に壁面との距離を一定に保つために、4つのボールキャスタ163a〜163dが取付けられている。
【0054】
移動装置100の本体下部には、点検作業を行うための水中カメラ175が設けられているから、反射ミラー176により、側方や下方の目視確認をすることができる。目視方向は、ミラー回転モータ177によって反射ミラー176を回転することにより、変更、調整を行うことができる。
【0055】
次に、本参考例に係る狭隘部移動装置によりシュラウド・サポートレグ周りの溶接線検査を行う場合を例にして、移動装置の運用方法について説明する。
【0056】
まずシュラウド・サポートレグへ移動装置100の本体に配置した3個のスラスタによって遊泳移動する。炉内上部から上部格子板、炉心支持板を通過して当該箇所へ達する場合もあれば、途中経路の移動を迅速に行うため支援装置内に収納されたままアクセスホール近傍に設置され、そこからシュラウド・サポートレグに遊泳移動する場合もある。
【0057】
上下移動用スラスタ154により浮上、潜行を行い、水平移動用スラスタ162a,162bにより前進、後進、左右旋回、その場旋回が可能であり、3次元遊泳移動を行うことができる。その後、シュラウド・サポートレグの検査対象箇所に、水平移動用スラスタ162a,162bにより装置本体を吸着させる。このスラスタ力がシュラウド・サポートレグ壁面への押付け力となり、車輪回転時の走行駆動力となる。壁面に当接した後は、上下移動用車輪152,153を回転させて上下方向に移動し、水平移動用車輪157,158を回転させて水平方向に移動する。これら二方向の移動機能により、壁面上の2次元移動が可能となる。
【0058】
次に、図8に示した移動用車輪による駆動力の発生原理について、図9(a),(b)を用いて説明する。
【0059】
図9(a)は、上下移動用のスラスタ154および上下移動用車輪152、ならびに上下移動用車輪153の駆動系構成の概略を示した模式図であり、図9(b)は車輪単体での駆動力の発生原理を説明する模式図である。この図9(a),(b)において、上下移動用車輪152,153は、円柱形状をした部材の表面にブラシ164がらせん状に植え込まれた構成となっている。さらに、上下移動用車輪152と上下移動用車輪153とでは、らせんの向きが互いに逆であり、中間歯車151により回転方向が反転されて駆動力が伝達される構成となっている。
【0060】
図9(b)は、上下移動用車輪153単体についての説明図である。この車輪153を壁面に押付けて右方向に180°回転させると、ブラシ164の先端が壁面上を車輪回転軸に対して垂直方向、水平方向にこすることによって、合力である壁面作用力181が発生する。上下移動車輪153側、すなわち装置本体側には、その反力182が走行駆動力として作用する。
【0061】
この反力182の方向は、ブラシ164のらせんのピッチに依存する。ピッチを小さくして、車輪一回転当りのブラシ164の先端と壁面との接触点が回転軸と平行な方向に移動する長さを、ブラシ164の植え込み長さに対してごく僅かに小さくすれば、単位回転速度での壁面上の接触点におけるブラシ164先端の速度は、回転軸と垂直な方向の成分に比べて回転軸方向の成分をかなり小さくすることが可能である。すなわち、ブラシを植え込むピッチを小さくすることによって、車輪を高速に回転しても回転軸と平行な方向に小さな駆動速度を発生させることが可能になる。
【0062】
一般的に、スラスタ力を発生させるためにはスラスタを高速に回転させる必要があるが、壁面に接触して車輪移動を行う場合には低速回転が必要になる。したがって、スラスタおよび車輪を同一の駆動源により駆動する場合には、駆動源と車輪回転軸との間に高比率の減速機を組み込まなければならず、駆動系の構造複雑化と動作効率の低下とを招く。
【0063】
それに換えて、図9(a)に示すような構成によれば、減速機を用いることなく壁面接触時の車輪による低速移動と、スラスタ154の高速回転による遊泳移動とが可能になる。図9(a)において、ブラシ164のらせんの向きを逆にした一組の上下移動用車輪152と上下移動用車輪153とを、互いに逆向きに回転駆動することによって左右対称の反力186が発生すると、車輪回転軸と垂直な方向の駆動力は相殺され、その合力である駆動力187が車輪の対称軸上で車輪回転軸と平行に発生する。
【0064】
前述したように、ブラシ164の植え込みピッチを小さくすることによって車輪の回転軸と平行な方向の駆動速度を小さくすることができるので、合力である駆動力187の方向、すなわちスラスタ力188と同じ方向に小さな駆動速度が与えられ、移動装置100の本体を低速移動させることができる。すなわち、一つの上下移動用モータ150により、減速機を用いずに、壁面接触時の車輪による低速移動と、スラスタを高速回転することによる遊泳移動とがともに実現可能である。
【0065】
このように本参考例によれば、一つの駆動源と簡易な駆動構成によりスラスタによる遊泳移動と車輪による走行移動とが可能になるので、装置に搭載する駆動源を減らすことができ、装置を薄く小型にまとめることが容易になる。その結果、炉下部のシュラウド・サポートレグやアニュラス部のジェットポンプ・アダプタ近傍の狭隘部へ進入、移動して溶接部の点検、検査、予防保全、補修といった各種作業を効率的に行うのに好適な炉内移動装置を提供することができる。
【0066】
同時に、ケーブル芯数、またはケーブル本数を減らすことができるので、装置移動時の負荷が小さくなって移動性能の低下を防ぎ、かつ装置の信頼性を向上させることができる。
【0067】
上記実施例では、原子炉を適用対象として説明したが、火力発電所等における、水が満たされた狭隘部の監視、補修を要する装置や、さらには船舶の推進機構周辺等にも本発明を適用することができる。
【0068】
【発明の効果】
本発明は上述のように、移動制御および位置決めが迅速、的確に行われ、水が満たされた装置内各部での各種作業を効率的に行うことができる。
【図面の簡単な説明】
【図1】 原子炉の圧力容器内の構造と構造物のうち、炉下部を示す横断面図。
【図2】 原子炉の圧力容器内の構造と構造物のうち、本発明に関連する部位を示す縦断面図。
【図3】 本発明による炉内移動システムを示す図であって、図3(a)は支援装置9および移動装置100の構成を示す斜視図、図3(b)は制御装置13および関連機器の説明図。
【図4】 本発明の実施例における支援装置の構成を詳細に示す正面図。
【図5】 同実施例における支援装置の内部に設置した監視装置の構成を示す平面図。
【図6】 同実施例における支援装置の内部に取付けたフロートの構成を示す縦断面図。
【図7】 図7(a)は本発明の第1の参考例における狭隘部移動装置の構成、形状を示す正面図、図7(b)は同じく一部側断面図。
【図8】 図8(a)は本発明の第2の参考例における炉内内狭隘部移動装置の構成、形状を示す正面図、図8(b)は図8(a)のA−A線に沿った一部側断面図。
【図9】 図9(a)は、本発明の第2の参考例における上下移動用のスラスタおよび上下移動用車、上下移動用車輪の駆動系構成の概略を示す模式図、図9(b)は同参考例における移動用車輪単体での駆動力の発生原理を説明する模式図。
【符号の説明】
1 原子炉圧力容器
9 支援装置
10 電源ケーブル
11 信号ケーブル
12 制御統括システム
13 制御装置
14 操作ボックス
16 上下移動用スラスタ
17 水平移動用スラスタ
18 上下スラスタ駆動モータ
19 水平スラスタ駆動モータ
23 ケーブル巻取り装置
28 カメラケーブル駆動装置
29 監視カメラ
30 水中ライト
31 フロート
33 カメラケーブル駆動モータ
37 中継端子板
38 ケーブル
100 狭隘部移動装置
101 上下スラスタ用モータ
102 上下移動用スラスタ
103 水平スラスタ用モータ
105 水平移動用スラスタ
106 車輪駆動モータ
108 移動車輪
110 ステアリングモータ
120 フロート
150 上下移動モータ
152 上下移動用車輪
153 上下移動用車輪
154 上下移動用スラスタ
155 水平移動用モータ
157 水平移動用車輪
158 水平移動用車輪
160 水平スラスタ用モータ
162 水平移動用スラスタ
164 ブラシ
175 水中カメラ
Claims (1)
- 作業機器を搭載し、水が満たされた狭隘部内を移動し得る狭隘部移動装置と、
前記狭隘部移動装置を出入りさせる開口部および前記狭隘部移動装置を保持する保持手段を有し、前記狭隘部移動装置に対する支援動作を行いつつ移動しうる支援装置とを備え、所要時に前記支援装置における前記保持手段による保持を解除し、前記開口部を介して前記狭隘部移動装置を出入りさせるよう構成される水中狭隘部移動システムにおいて、
前記支援装置は、前記監視カメラを出し入れするためのケーブルの繰り出し、巻取りを行うケーブル巻取り機を有することを特徴とする水中狭隘部移動システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001231508A JP4090712B2 (ja) | 2001-07-31 | 2001-07-31 | 水中狭隘部移動システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001231508A JP4090712B2 (ja) | 2001-07-31 | 2001-07-31 | 水中狭隘部移動システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2003040194A JP2003040194A (ja) | 2003-02-13 |
| JP2003040194A5 JP2003040194A5 (ja) | 2005-10-27 |
| JP4090712B2 true JP4090712B2 (ja) | 2008-05-28 |
Family
ID=19063553
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001231508A Expired - Fee Related JP4090712B2 (ja) | 2001-07-31 | 2001-07-31 | 水中狭隘部移動システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4090712B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4546746B2 (ja) * | 2004-02-19 | 2010-09-15 | 株式会社日立製作所 | 検査装置、検査装置の投入装置および検査方法 |
| JP4599095B2 (ja) * | 2004-05-27 | 2010-12-15 | 株式会社東芝 | 原子炉内検査装置 |
| JP2007057357A (ja) * | 2005-08-24 | 2007-03-08 | Toshiba Corp | 原子炉内検査保全方法 |
| JP4984497B2 (ja) * | 2005-11-10 | 2012-07-25 | 株式会社日立製作所 | 水中検査装置 |
| JP4965867B2 (ja) | 2006-02-13 | 2012-07-04 | 株式会社東芝 | 水中移動補修検査装置および水中移動補修検査方法 |
| JP5295546B2 (ja) * | 2007-10-19 | 2013-09-18 | 株式会社東芝 | 原子炉内点検補修装置およびその制御方法 |
| CN108263573A (zh) * | 2016-12-30 | 2018-07-10 | 核动力运行研究所 | 一种核电厂吸盘式浮游装置 |
-
2001
- 2001-07-31 JP JP2001231508A patent/JP4090712B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003040194A (ja) | 2003-02-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102421571B (zh) | 利用磁检查车的检查系统和检查方法 | |
| JP2007212393A (ja) | 水中移動補修検査装置 | |
| JP4090712B2 (ja) | 水中狭隘部移動システム | |
| US20030128794A1 (en) | Device and method for repairing inside of reactor pressure vessel | |
| JP4112891B2 (ja) | 原子炉内移動装置 | |
| US6528754B2 (en) | Underwater maintenance repair device and method | |
| JP7389196B2 (ja) | 往復移動装置 | |
| US20100232562A1 (en) | Working device and working method | |
| JP2007003442A (ja) | 原子炉容器の管台溶接部のut検査方法および装置 | |
| JP2007003400A (ja) | 制御棒貫通孔部材検査装置 | |
| EP2149887B1 (en) | Device and method for preventive maintenance and repair of cylindrical structure | |
| JPH1114784A (ja) | 原子炉内検査装置 | |
| JP2003337192A (ja) | 原子炉圧力容器内構造物の点検予防保全装置および点検方法 | |
| JP2008116421A (ja) | 水中検査装置及び水中検査方法 | |
| JP4000032B2 (ja) | 炉底部作業装置および作業方法 | |
| JP5295546B2 (ja) | 原子炉内点検補修装置およびその制御方法 | |
| JP4585079B2 (ja) | 作業装置および作業方法 | |
| JP3306040B2 (ja) | 原子炉内構造物の保全・補修装置 | |
| JP4592283B2 (ja) | 原子炉内検査装置 | |
| CN116062129A (zh) | 一种适用核电厂乏燃料水池巡检水下浮游和爬壁的机器人 | |
| JP4875333B2 (ja) | 検査装置 | |
| JPH11311692A (ja) | 遠隔炉内作業装置および方法 | |
| JPH08146186A (ja) | 原子炉内構造物検査装置および検査方法 | |
| JP4383920B2 (ja) | 炉内保全・補修装置 | |
| JP4746273B2 (ja) | 炉内作業システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050726 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050726 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070622 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070629 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070823 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20071023 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071213 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20071228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080222 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080227 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110307 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120307 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130307 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130307 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140307 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |