JP3998451B2 - ピボット取付けアセンブリ - Google Patents
ピボット取付けアセンブリ Download PDFInfo
- Publication number
- JP3998451B2 JP3998451B2 JP2001321522A JP2001321522A JP3998451B2 JP 3998451 B2 JP3998451 B2 JP 3998451B2 JP 2001321522 A JP2001321522 A JP 2001321522A JP 2001321522 A JP2001321522 A JP 2001321522A JP 3998451 B2 JP3998451 B2 JP 3998451B2
- Authority
- JP
- Japan
- Prior art keywords
- pivot
- force
- mounting assembly
- pivot mounting
- support surface
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images








Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon Stands for scientific apparatus such as gravitational force meters
- F16M11/20—Undercarriages with or without wheels
- F16M11/24—Undercarriages with or without wheels changeable in height or length of legs, also for transport only, e.g. by means of tubes screwed into each other
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon Stands for scientific apparatus such as gravitational force meters
- F16M11/02—Heads
- F16M11/04—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand
- F16M11/06—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting
- F16M11/10—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting around a horizontal axis
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon Stands for scientific apparatus such as gravitational force meters
- F16M11/20—Undercarriages with or without wheels
- F16M11/2092—Undercarriages with or without wheels comprising means allowing depth adjustment, i.e. forward-backward translation of the head relatively to the undercarriage
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M2200/00—Details of stands or supports
- F16M2200/04—Balancing means
- F16M2200/044—Balancing means for balancing rotational movement of the undercarriage
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M2200/00—Details of stands or supports
- F16M2200/06—Arms
- F16M2200/063—Parallelogram arms
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Pivots And Pivotal Connections (AREA)
- Microscoopes, Condenser (AREA)
- Transmission Devices (AREA)
Description
【発明の属する技術分野】
本発明は、ピボットベースに水平軸を中心に旋回自在となるようにヒンジ結合されたピボットアームを含む、負荷を垂直方向に調節可能に取付けるピボット取付けアセンブリに関する。特に、ランプ、視覚表示装置、および垂直方向に調節可能に設けられる外科手術用顕微鏡等の他の装置などを設置するスタンドでの使用に適するピボット取付けアセンブリに関する。
【0002】
【従来の技術】
図1(A)および図1(B)は、ピボットベース3およびピボットアーム5を含み、ここでは例えば外科手術用顕微鏡7である負荷が垂直方向に調節可能に設けられた従来のピボット取付けアセンブリが概念的に示されており、図1(A)は、ピボットアームが持ち上げられた位置にあり、図1(B)は、ピボットアームが下げられた位置にある場合を示している。ピボットアーム5の一方端は、水平軸9を中心に旋回自在となるようにピボットベース3にヒンジ結合され、他方端は外科手術用顕微鏡7を支持する。
【0003】
ピボットアーム5には補助アーム11が平行に連結(is coupled)され、ピボットアーム5の旋回位置とは関係なく、外科手術用顕微鏡7の垂直方向のアライメントが維持されるようになっている。
【0004】
外科手術用顕微鏡の重量によって、ピボットアームにピボット軸まわりのトルクが付与され(加わり)、このトルクはガス圧ばねとして設けられる付力装置(force-providing device)13によってその大部分が補償されるため、ピボット取付けアセンブリのヒンジ中に与えられる摩擦力が十分強くても、ピボットアームはユーザが調節した旋回位置にほぼとどまる。この目的のため、ガス圧ばね13の一方の作動端15は旋回軸9から離れた領域でピボットアーム5にヒンジ結合され、ガス圧ばね13の他方の作動端17は、旋回軸9から垂直方向に間隔を開けてピボットベース3にヒンジ結合される。ガス圧ばねの圧縮力によってピボットアームに反トルクモーメントが加わり、負荷7の重量の補償(compensate)を行う。
【0005】
【発明が解決しようとする課題】
旋回位置とは関係なく負荷重量を補償することに関しては、下旋回位置では付力装置13の作用が強すぎるため、ピボットアームは図1bの矢印19で示す方向に自動的に上昇し、上旋回位置では付力装置の作用が小さすぎるため、アームは図1aの矢印21で示す方向に自動的に下降することがわかっている。このような自動的な移動は、通常はヒンジの摩擦力を上げて防止するが、これはユーザによる所望の旋回位置の円滑かつ正確な調整を妨げる。
【0006】
この問題の解決策として、EP0433426A1は、付力装置のピボットベース側の作動端を固定位置でピボットベースにヒンジ結合せず、代わりにピボットベース中に設けられた細長い垂直方向に延びる穴の中へ延びるピンと係合させることによって、付力装置がピボットベース上に支持される位置と水平軸との間の垂直方向の距離が調節可能となるピボット取付けアセンブリを開示している。細長い穴は、支持位置と水平軸との間の垂直方向の距離がピボットアームの旋回位置に応じて自動的に変化できるようにある特定の湾曲構造をしており、これにより付力装置によって加わる旋回位置に応じたトルクの調整が可能となる。しかしこの点において、付力装置のピボットベース側上の作動端の、ピボットアームの旋回位置によって変化する細長い穴の中での動きは十分正確ではないことがわかっているので、摩擦力が低下すると、負荷重量を旋回位置と関係なく適切に補償できない。
【0007】
従って、本発明の目的は、より簡単に調節可能なピボット取付けアセンブリを提供することである。
【0008】
さらに、本発明の目的は、旋回位置とはほぼ関係なく、支持する負荷の重量を補償可能な、上述した種類のピボット取付けアセンブリを提供することである。
【0009】
【課題を解決するための手段】
本発明は、ピボット取付けアセンブリであって、負荷を垂直方向に調節可能に取付けるピボットアーム(5)と、第1の付力装置(13)とを含み、前記ピボットアームは水平軸(9)を中心に旋回自在にピボットベース(3)にヒンジ結合され、前記第1の付力装置(13)は、その2つの作動端のうちの第1端が、前記水平軸(9)から間隔を開けて前記ピボットアーム(5)にヒンジ結合され、その2つの作動端のうちの第2端(17)が、前記水平軸(9)から垂直方向に距離(a)だけ離れた支持位置(49)において前記ピボットベース(3)上に移動可能に支持されて、前記ピボットアーム(5)上の前記負荷によって付与されるトルクを少なくとも部分的に補償する反トルクモーメントを付与し、前記ピボットベース(3)には、水平方向を横切って延びる支持表面(27)が設けられ、前記支持表面(27)は、前記支持位置(49)が前記支持表面(27)に沿って移動可能な移動領域を有し、前記支持表面(27)は、前記支持位置(49)が前記移動領域中に配置され、前記ピボットアーム(5)が持ち上げられると、前記ピボットベース(3)に移動可能に支持された前記第1の付力装置(13)の前記第2端(17)に下向きの偏向力(45)が作用して前記支持位置(49)を移動させ、前記ピボットアーム(5)が下げられると、前記ピボットベース(3)に移動可能に支持された前記付力装置(13)の前記第2端(17)に上向きの偏向力(45)が作用して前記支持位置(49)を移動させるように、前記移動領域中に配向され、前記ピボット取付けアセンブリは、前記下向き、または/および上向きの偏向力(45)に対する対抗力を生成する第2の付力装置(36)を含み、前記対抗力は、前記支持位置(49)が前記移動領域中の少なくとも一部領域に配置された状態で、前記ピボットベース(3)に移動可能に支持された前記第1の付力装置(13)の前記第2端(17)に作用することを特徴とする。
【0010】
本発明は、ピボットベースに水平軸を中心に旋回自在となるようにヒンジ結合されたピボットアームを含む、負荷を垂直方向に調節可能に取付けるピボット取付けアセンブリに由来する。ピボットアーム上の負荷によって付与されるトルクを少なくとも部分的に相殺(compensate)する反トルクモーメントを付与するため、コイル圧ばねやガス圧ばね等の付力装置を設ける。付力装置の一方の作動端は、水平軸から間隔を開けてピボットアームにヒンジ結合され、他方の作動端は、水平軸から垂直方向に間隔を開けてピボットベース上に支持される。この点において、ピボットベース上に水平方向を横切る方向に延びる支持表面を設けて、付力装置のピボットベース側上の作動端の支持位置を、ピボットベース上で垂直方向に調節可能に与えて、付力装置の支持位置を該支持表面に沿って移動可能とする。ピボットアームが持ち上げられると支持位置が下方へ動き、ピボットアームが下げられると支持位置が上昇するように支持表面は、配向し(is oriented)ピボットアームの上昇位置または下降位置での自動的な移動を抑制するように、旋回位置に応じて異なる反トルクモーメントを調整する。
【0011】
本発明において、支持位置の下降または/および上昇移動を阻止するために、支持表面の少なくとも一部領域中に、対向力を生じる第2の付力装置が含まれている。
【0012】
この第2の付力装置によって付与される対向力によって、支持位置を、旋回位置に応じて支持表面の少なくとも上記一部領域に沿って連続的かつ明確に移動させることができ、これにより、保持する負荷重量の補償を、ピボットアームの旋回位置とはほぼ無関係に、かつほぼ不備なく行うことができる。
【0013】
好適には、第2の付力装置は、支持位置のために支持表面上に設けた移動領域の中央に支持位置を保持するように作用する構造をもつ二重作用型付力装置であり、第2の付力装置は、好適には、支持位置が中央から離れるに従って増大する対抗力を与える。このため、第2の付力装置は、好適には少なくとも圧力ばねまたは張力ばねを含むばねアセンブリを含みうる。
【0014】
好適には、ピボット取付けアセンブリは、大きさの異なる負荷が補償できるように設けられる。この目的のため、支持位置が支持表面に沿って水平軸に対して垂直方向に移動できるように移動領域を移動させる駆動装置(ドライブ)を設ける。移動領域の位置が水平軸から垂直方向により下方に配置される場合、ピボット取付けアセンブリは、移動領域が水平軸により近く位置決めされた場合よりもより大きな負荷を補償できる。
【0015】
反トルクモーメントまたは補償すべき負荷を調節可能なある範囲では、支持位置を支持表面沿いに移動させる支持表面の傾斜のため、第1および第2の付力装置によって与えられる力は、好適には、付力装置のピボットベース側の作動端に働く偏向力より第2の付力装置の最大対抗力が大きくなるように互いに調整可能である。この結果、現在の支持位置がばね力の平衡によって明確に規定され、旋回位置とは関係なく負荷重量を最大限に補償できる。好適には、この力の調整は移動領域の一部領域について行われ、より好適には移動領域全体について行われる。さらにこの力の調整は、少なくとも調整可能な小さな反トルクモーメントについて行われ、より好適には調整可能なすべての反トルクモーメントについて行われる。
【0016】
好適には、移動領域を支持表面の部分領域として境界付けするために、付力装置のピボットベース側の作動端の一構成要素に一対のエンドストップをさらに含む。この点において、この一対のエンドストップは、ドライブによって垂直方向に移動可能であるのが好ましい。付力装置のピボットベース側の端部の構成要素は、第2の付力装置の対抗力が支持表面の傾斜によって生じる偏向力を補償するのに十分でない場合は、エンドストップ対の一方に接触することが好ましい。
【0017】
好適には、移動領域を移動させるドライブと第2の付力装置とは、機能上、直列に接続される。この点において、駆動方向に沿ってドライブの2つの作動端のうちの一方の作動端は、ピボットベース上に支持される第1の付力装置の端部に固定連結し、他方の作動端はピボットベースにスライド可能に支持され、両作動端間に第2の付力装置が挿入されているのが好ましい。またはドライブの2つの駆動端の一方をピボットベースにスライド可能に支持し、他方の作動端を第1の付力装置の端部に連結し、両作動端間に第2の付力装置を介挿するのが好適である。
【0018】
エンドストップの好適かつ単純な実施形態を得るには、2つのエンドストップの少なくとも一方を、完全に圧縮された場合にエンドストップとなる第2の付力装置の圧力ばねによって設ける。
【0019】
さらに、ドライブはスピンドルドライブが好適であり、そのスピンドルはその長手方向に沿って第2の付力装置のコイルばねをそ突き通していることが好適である。
【0020】
ピボット取付け装置の他の好適な実施形態では、ドライブによって水平軸に対して垂直方向に移動可能なキャリッジ上に支持領域を設ける。
【0021】
支持表面の幾何学上の構造については、支持表面に対する垂線が斜め上に傾斜する形状が好適である。
【0022】
【発明の実施の形態】
以下に、例示的な実施形態および添付の図面を参照して本発明の説明を行う。
【0023】
図2(A)、図2(B)、および図2(C)は、本発明に係るピボット取付けアセンブリ1の第1の実施形態の部分図である。ピボット取付けアセンブリ1の基本的な構造は、図1(A)および図1(B)に関して説明した従来のピボット取付けアセンブリと同様であり、ピボットベース3と、水平に配置された軸9周りに旋回可能にピボットベースにヒンジ結合されたピボットアーム5とを含む。図2(A)乃至図2(C)はそれぞれ、ピボット取付けアセンブリのピボットベース3の近傍部分を示しているが、ピボットアーム5のうち、負荷が設置され、かつピボットベース3から離れた部分は簡略化のため示さない。ピボットアーム5におけるピボットベースから離れた部分への負荷の設置については、この第1の実施形態では図1(A)および図1(B)と同様に実施されるため、図1(A)および図1(B)を直接参照するものとする。負荷をピボットアーム5の旋回位置とは関係なく垂直方向に設置するには、ピボットアーム5に平行に延び、水平軸9から間隔を開けてピボットベース3にヒンジ結合されて、他の旋回軸23を中心に回動する補助アーム11が同様に設けられる。図1に示すピボット取付けアセンブリとちょうど同じくガス圧ばね13が第1の付力装置として設けられ、その一方の作動端は水平軸9から間隔を開けてピボットアーム5にヒンジ結合(回動自在に接続)され、他方の作動端17はピボットベース3を押圧している。
【0024】
図1に示す従来のピボット取付けアセンブリとは異なり、本発明に係るピボット取付けアセンブリ1では、ガス圧ばね13におけるピボットベース側の作動端17は、ピボットベース3に固定的にヒンジ結合されず、ピボットベースに対して垂直方向に移動可能である。このため、ガス圧ばね13のピボットベース側の作動端17には、水平軸周りに回動可能なローラ25が支持され、このローラはピボットベース3上に設けられた支持表面27上を回動できる。この結果、ローラ25と支持表面27との接点49、すなわち圧力ばね13のピボットベース側の端部17が支持表面27上に支持される位置が支持表面27に沿って移動可能となり、ピボットアーム5の旋回軸9と支持位置49との間の距離も同様に、垂直方向に変化できる。
【0025】
図2(A)では、ピボットアーム5は斜め上向きの旋回位置に配置され、図2(B)では、ピボットアームはほぼ水平の旋回位置にあり、図2cでは、ピボットアームは斜め下向きの旋回位置に配置される。旋回位置に応じて、水平軸9と支持表面27上のローラ25の支持位置との距離aは、ピボットアーム5の旋回位置を一番上から一番下までずらすにつれて連続的に短くなるように変化する。従って、図2(A)の距離a1は図2(B)の距離a2より長く、図2(B)の距離a2は図2(C)の距離a3より長い。ガス圧ばね13によってピボットアーム5にかけられる反トルクモーメントは、水平軸9と支持位置との距離によって異なるので、反トルクモーメントは、ピボットアーム5が持ち上げられた旋回位置のほうが、ピボットアームが下げられた旋回位置のときよりも大きい。この結果、ピボットアームが上昇位置にある場合のピボットアームの自動的な下降(図1(A)の矢印21参照)が解消され、同様に、ピボットアームが下降位置をとる場合の自動的な上昇(図1(B)の矢印19参照)が防止される。
【0026】
旋回位置によって異なる支持位置の移動について、以下にさらに説明する。
【0027】
ピボット取付けアセンブリ1は、支持位置49が支持表面27に沿って移動可能な領域を調節するためのドライブ30をさらに含む。ドライブ30はねじ山が形成されたねじ付きスピンドル29を含み、このねじ付きスピンドルは、ツイストハンドル34によって作動可能で、ピボットベース3に固定されたガイドスリーブ31を通過し、支持表面27にほぼ平行に垂直面内に配置(oriented)される。ねじ付きスピンドル29は、その長手方向に沿って、ガイドスリーブ31中を摺動可能に案内される。ねじ山を設けたスピンドル29は、ガス圧ばね13のピボットベース側の作動端17中に設けられている、ねじ山が形成されたねじ付きボア33中に螺着され、これにより支持位置49を支持表面27に沿って移動させる偏向力によって、ねじ付きスピンドル29は、ガイドスリーブ31に対してその長手方向に沿ってやはり変位する。
【0028】
ただしねじ付きスピンドル29は、ピボットベース3に対して自由に移動可能ではない。第2の付力装置としてばねアセンブリ36が設けられ、ねじ付きスピンドル29の移動を制御する。
【0029】
この目的のため、ツイストハンドル34とガイドスリーブ31との間にコイルばね35が配置され、ねじ付きスピンドル29をその長手方向に沿って横切る(traverses)。さらに、ガイドスリーブ31とねじ付きボア33との間に、支持リング37がねじ付きスピンドル29に固定され、かつ別のコイルばね39が支持リング37とガイドスリーブ31との間に配置され、ねじ付きスピンドル29はこのコイルばねの中心を通ってやはり延びる。もしねじ付きスピンドル29上に他の力が付与されなければ、2つのコイルばね35および39は、図2(B)に示すように2つのコイルばね39および35がほぼ同程度に圧縮された中央位置へとねじ付きスピンドル29を移動させるように働く。
【0030】
圧力ばね13のピボットベース側の作動端17と、圧力ばね13のピボットアーム5に固定された作動端との間を結ぶ線の延長方向は、ピボットアーム5が旋回すると、ピボットアーム5の延長方向とともに移動する。このため矢印41で示す圧力ばね13の圧力による力と、支持表面27の配向(orientation)(支持表面27に対する垂線43は斜め上へ傾斜する。図2(C)参照)とによって偏向力45を生じ、この力は圧力ばね13のピボットベース側上の作動端17に対して支持表面27に平行に作用し、ピボットアーム5が上へ旋回(図2(A)参照)すると下方に向かい、ピボットアーム5が下へ旋回(図2(C)参照)すると上方に向かう。圧力ばね13のピボットベース側の作動端17が、ローラ25を介してほぼ摩擦なしで支持表面27上を回動すると、偏向力45はねじ付きスピンドル29へほぼ完全に伝達され、該スピンドルをガイドスリーブ31に対して移動させる。偏向力45が下向きの場合は、上側のコイルばね39が圧縮し、偏向力45を相殺する対抗力を与えて力の平衡が得られる(図2(A)参照)。逆に、上向きの偏向力45(図2(C)参照)は、下側のコイルばね35が圧縮されて偏向力45に対する対抗力を与え、上記と同様に力の平衡が得られるように、ねじ付きスピンドル29を移動させる。図2(B)に示すピボットアーム5の水平旋回位置では、圧力ばね13の圧力による力41は支持表面27にほぼ垂直に作用し、このためねじ付きスピンドル29方向または支持表面27に平行に作用する偏向力はほぼなく、2つのコイルばね35および39は、ほぼ同程度に圧縮された状態で、ねじ付きスピンドル29を図2(B)に示す中央位置に保持する。
【0031】
押圧力41によって付与される偏向力45と、コイルばね35および39によって付与される対抗力との上記のような相互作用によって、旋回軸9と、ピボットアーム5の旋回位置に応じて異なる圧力ばね13の支持表面27上の支持ベース側の作動端17の支持位置49との間の距離aが調節され、これにより旋回位置に関係なく希望の反トルクモーメントが得られる。このためピボット取付けアセンブリ1に設置した負荷の重量を旋回位置に関係なく相殺できるので、ユーザは、ピボットアームの自動的な移動なしで、かつピボット取付けアセンブリのヒンジが旋回運動において比較的小さな摩擦を生じたとしても、ピボットアームを旋回させて負荷を希望の高さに設置できる。
【0032】
図2(A)、図2(B)、図2(C)では、ねじ付きスピンドル29は、水平軸9と支持位置49との間の距離aが比較的短くなる程度までだけ、ねじ付きボア33中へ通される。このため圧力ばね13によって生じる反トルクモーメントは比較的小さく、従ってピボット取付けアセンブリ1は比較的軽量の負荷を補償するように調整される。しかしやはり各種旋回位置を示す図3(A)、図3(B)、図3(C)に示すように、ピボット取付けアセンブリ1は、ドライブ30の駆動によって、より重い負荷を補償するように調整可能である。この目的のため、ねじ付きスピンドル29は、圧力ばね13のピボットベース側の端部にあるねじ付きボア33中により深く通され、水平軸9と支持位置49との間の距離aが図2(A)、図2(B)、図2(C)より長くされる。これに応じて、ピボット取付けアセンブリによって生じる反トルクモーメントは大きくなり、アセンブリ1はより重い負荷を支持するように調整される。ここでもまた、距離aはピボットアーム5の旋回位置に応じて変化するため、ピボットアーム5が持ち上げられると、この距離(図3(A)の距離a1参照)は、ピボットアーム5が水平に配置された場合(図3(B)の距離a2参照)よりも長くなり、この距離はピボットアーム5が下げられた場合(図3(C)の距離a3参照)よりも長くなる。
【0033】
アセンブリが重い負荷用に調整されても、ピボットアーム5がほぼ水平に延びた状態では、圧力ばね13によって生じる押圧力41は、圧力ばね13のピボットベース側の端部17上で支持表面27に平行な偏向力をやはりほぼ付与(発生)しないため、2つのコイルばね35および39は、ねじ付きスピンドル29を中央位置に保持する。図3(B)のほぼ水平な位置からピボットアーム5が連続的に持ち上げられると、上側のコイルばね39が次第に圧縮され、水平軸9と支持位置49間の距離aが同様に連続的に長くなり、反トルクモーメントを大きくする。
【0034】
しかし図3(A)に示すようにピボットアーム5が持ち上げられると、支持表面27に対する圧力ばね13の延長方向の傾きは図2(A)のものより大きくなり、図2(A)より大きな下向きの偏向力45を生じる。この比較的大きな偏向力45によって、図3(A)に示すように、ピボットアームのある特定の上旋回位置が得られ、この場合、偏向力45はコイルばね39によって付与される最大対抗力を上回るため、コイルばね39は完全に圧縮される。このためコイルばね39は、支持位置49の下向きの移動のエンドストップとなる。これに対応して、本設定においてピボットアーム5が下げられると、上向きの偏向力45は図2(C)と比べて大きくなり、下側のコイルばね35が完全に圧縮され、支持位置49の上向きの移動のエンドストップとなる下旋回位置が得られる。
【0035】
次に、図2および図3を参照して説明したピボット取付けアセンブリの実施形態の変形例を説明する。構造上および機能上、対応する構成要素には、図2および図3と同じ参照番号を付す。ただし同一要素を区別するため、追加文字を加える。例示のため、上記で行った説明全体を参照する。
【0036】
図4の部分図に示すピボット取付けアセンブリ1aは、図2および図3に示すピボット取付けアセンブリとほぼ同じ構造をもつ。ただしピボットベース3a上に設けられて圧力ばね13aをピボットベース3a上に支持する支持表面27aは、直線状には延びていない。図4の支持表面27aは凹型にカーブしている。このため、支持表面27aの向き(orientation)も支持位置49aによって異なることから、圧力ばね13におけるピボットベース側の端部17aで、圧力ばね13によって支持表面27aへ向かって生じる偏向力41aは、ピボットベース3aに対する圧力ばね13aの延長方向の向きによってだけではなく、偏向力とコイルばね39aおよび35aによって生じる対抗力との力の平衡のため自動調節を行う支持位置49aにも依存する。カーブした支持表面27aを適当に構成すれば、設置する負荷の重量を旋回位置に関係なく相殺する上で、ピボットアーム5aの旋回軸9aと支持位置49aの距離aのより微細な調整が可能となる。
【0037】
図2および図3のピボット取付けアセンブリと異なり、図4のピボット取付けアセンブリ1aでは、ドライブ30aのねじ付きスピンドル29a用のガイドスリーブ31aはピボットベース3aに固定されておらず、関節式ジョイント51によって旋回自在にヒンジ結合されているため、ねじ付きスピンドル29aに連結されたローラ25aは、上述した力の平衡が得られる位置まで張力なしで支持表面27a上を回動しうる。
【0038】
図5に示すピボット取付けアセンブリ1bは、図2および図3に示すピボット取付けアセンブリと同様の構造である。ただし圧力ばね13bの押圧力41bに対する対抗力を与えるコイルばねは、ねじ付きスピンドル29b用のガイドスリーブ31bの両側には設けられていない。第2の付力装置36bは、ガイドスリーブ31bとねじ付きスピンドル29b端部のツイストハンドル34bとの間に1つだけコイルばね35bを有する。ガイドスリーブ31bと、圧力ばね13bのピボットベース側の作動端におけるローラ25bとの間には、やはり支持リング37bが取り付けられ、この支持リングはねじ付きスピンドル29bの下向きの移動のエンドストップとなる。従って、第2の付力装置36bは、コイルばね35bがピボットアーム5bの下向きの移動によって次第に圧縮される場合、コイルばね35bによってねじ付きスピンドル29の上向きの移動に対する対抗力のみを与える。
【0039】
圧力ばね13bの押圧力41bと、支持表面27bの傾斜と、コイルばね35bのばね力とが互いに適切に調整されれば、第2の付力装置36bにコイルばねを1つしか設けなくとも、ピボットアーム5bの旋回位置に関係なく、負荷によって与えられるトルクを十分正確に相殺できる。
【0040】
図2および図3において(ならびに図4および図5においても)、ねじ付きスピンドル29は、ねじ付きボア33およびツイストハンドル34とともに、支持位置49が支持表面27に沿って移動可能な範囲を変化させるドライブ30を構成する。さらに、支持リング37とガイドスリーブ31との間、およびガイドスリーブとツイストハンドル34との間にそれぞれ配置されるコイルばね35および39は、圧力ばね13のピボット端部側の端部に付与される偏向力に対向する付力装置36を構成する。ねじ付きスピンドル29がドライブ30の作動方向に沿ってねじ付きボア33中へ案内されると、ドライブ30は圧力ばね13のピボットベース側の端部に取り付けられ、一方、ばね35および39からなる第2の付力装置36は、ドライブ30とピボットベース3との間で、機能上、直列に接続される。
【0041】
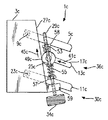
これに対して、図6に示すピボット取付けアセンブリ1cは、ピボットベース3cに固定されているねじ山が形成されたねじ付きスリーブ59を含み、このスリーブ中にねじ山が形成されたねじ付きスピンドル29cが通され、該スピンドルをその長手方向の定位置へとピボットベース3cに取付ける。さらに、ねじ付きスピンドル29cには間隔を開けて配置した2つのリング57および58が取付けられ、その間には2つのコイルばね53および55が配置され、該スピンドル29cはこれらコイルばねを貫通する。2つのコイルばね53−55間にはローラ25cが配置され、このローラはコイルばね53および55の端部に抗して静止する。ローラ25cは、圧力ばね13cのピボットベース側の端部17c上で回動自在に支持される。
【0042】
ここでもやはり、ピボットベース3c上に設けられた支持表面27cにローラ25cが接する支持位置49cは、2つの支持リング57−58間のねじ付きスピンドル29cに沿った領域でローラ25cが支持表面27c沿いに移動する間に、圧力ばね13の押圧力41cによって生じる偏向力45cと、コイルばね53および55によって付与される対抗力との力の平衡によって自動調整される。
【0043】
ここでは、支持リング57,58と、コイルばね53,55と、ローラ25cとによって、偏向力45に対する対抗力を与える付力装置36cを構成し、一方、ねじ付きスピンドル29cと、ねじ付きスリーブ59と、ツイストハンドル34cとによって、支持表面27cに沿って支持位置49cの偏向領域を移動させるドライブ30cが構成される。ドライブ30cの一方の作動端は、ねじ付きスリーブ59によってピボットベース3cに固定され、ドライブ30cの他方の作動端は圧力ばね13cのピボットベース側の作動端17cに接続され、両作動端間に付力装置36cが挿入される。
【0044】
図7に示すピボット取付けアセンブリ1dは、図6に示すピボット取付けアセンブリと同様の構造をもち、やはりローラ25dがばね53dおよび55dと接し、偏向力に対する対抗力が与えられる。ただしピボット取付けアセンブリ1dでは、ローラ25dがその上で回動しうる支持表面27dは、ピボットベース3dに直接設けられているのではなく、ピボットベース3dに対して水平方向を横切る(transverse)方向に移動可能なキャリッジ61上に設けられる。キャリッジ61は、ねじ付きスピンドル29dを含むドライブ30dを介して、ピボットベース3dに対して移動し、該スピンドルはピボットベース3d上に回動自在に支持され、ツイストハンドル34dによって駆動できる。キャリッジ61は、ねじ付きスピンドル29dによって貫通される(is traversed)ねじ山が形成されたねじ付きボア63を含むため、ねじ付きスピンドル29dを回転させることによって、キャリッジ61はピボットベース3dに対してねじ付きスピンドル29d方向に移動し、この結果、ピボットアーム5dの旋回軸9dと支持表面27d上のローラ25dの支持位置との間の距離aが変化して、保持する負荷に対してピボット取付けアセンブリによって生成される反トルクモーメントの大きさを調節する。
【0045】
さらに、キャリッジ61上に設置される第2の付力装置36dの力は、ピボット取付けアセンブリ1dのピボットベース側の端部17dに作用する。この第2の付力装置36dは、キャリッジ上に配置された互いに離れたサイドピース67,68を含み、該サイドピース67,68間は、その間に配置されるピン69を支持する。ピン69は支持表面27dに平行に垂直面中に延びる。ピン69はコイルばね53dおよび55dを横切り(traverses)、ローラ25dはコイルばね53dおよび55dの対向する端面間に配置される。コイルばね53dおよび55dの機能は、図6のコイルばね53および55の機能に相当する。
【0046】
図8は、図2および図3に示す実施形態のピボットベース側の端部17、およびそのピボットベース3に対する当接状態を示す部分図である。ガス圧ばね13の入れ子式ロッド71の端部にはヨーク73が取付けられ、一対の間隔を開けた同軸ボールベアリング75上に支持される。各ボールベアリング75はシャフト77によって貫通され(is traversed)、各シャフト77はボールベアリング75に隣接した他のボールベアリング79を支持し、これらのボールベアリング79は、ピボットベース3上でガス圧ばね13のピボットベース側の端部17を支持するローラ25を構成する。ピボットベース3上には2本のレール81が設けられ、ローラ25がその上で回転する支持表面27を規定する。シャフト77は、その対向する端部間に、ねじ付きロッド29によって貫通されるねじ付きボア33を含むブロック83を支持する。
【0047】
図9は、図2および図3に示す付力装置の変形例を示す。図9に示す付力装置はやはり、ツイストハンドル34eが取り付けられたねじ山付きロッド29eを含み、このねじ山付きロッド29eはピボットベースに固定したシフトスリーブ31eを貫通する。シフトスリーブ31eとツイストハンドル34eとの間に円板ばねパック35eが配置され、シフトスリーブ31eとねじ付きスピンドル29eに取り付けられた支持リング37eとの間に他の円板ばねパック39eが配置される。ばねパック35eおよび39eはリングキャップ40内部に設置され、リングキャップ40は、一方ではばねパックの周囲を保護するように係合し、他方ではばねパック35e,39eの圧縮のエンドストップとして機能する。
【0048】
上述した各実施形態では、反トルクモーメントを生成する付力装置としてガス圧ばねが設けられる。しかし、コイル圧ばねや円板圧力ばね(disc pressure spring)等の他の種類の圧力ばねの使用も可能である。
【0049】
さらに、上述した各実施形態では、支持表面に沿って支持位置を移動させる偏向力に対する対抗力を生成する付力装置のばねとして、コイルばねが設けられる。これについても、円板ばね(disc springs)、延長または圧縮ばね等の他のタイプのばねの使用も可能である。対抗力は、第2の付力装置中に組み入れたゴム製のブロック等の弾性材料から構成される部分によっても付与できる。
【0050】
上述した各実施形態では、第1の付力装置は、ローラが介挿(being interposed)された状態で支持表面上に支持される。しかし第1の付力装置のピボットベース側の端部を、ピボットベースの支持表面上に支持するには、ローラではなくスライドストーン(slide stone)等を介挿(interpose)してもよい。この場合、摺動摩擦を減じる適切な方法をとることができる。
【図面の簡単な説明】
【図1】 従来のピボット取付けアセンブリを示す図である。
【図2】 本発明に従うピボット取付けアセンブリの第1の実施形態において、小さな負荷を保持するように調節された各種旋回位置を示す部分図である。
【図3】 図2に示す実施形態において、重い負荷を保持するように調節された各種旋回位置を示す部分図である。
【図4】 本発明に従うピボット取付けアセンブリの第2の実施形態の部分図である。
【図5】 本発明に従うピボット取付けアセンブリの第3の実施形態の部分図である。
【図6】 本発明に従うピボット取付けアセンブリの第4の実施形態の部分図である。
【図7】 本発明に従うピボット取付けアセンブリの第5の実施形態の部分図である。
【図8】 図2および図3に示す実施形態の追加の図である。
【図9】 図2および図3に示す付力装置の変形例の図である。
【符号の説明】
1 ピボット取付けアセンブリ、3 ピボットベース、5 ピボットアーム、9 水平軸、13 第1の付力装置、27 支持表面、30 ドライブ、36 第2の付力装置、49 支持位置、61 キャリッジ。
Claims (12)
- ピボット取付けアセンブリであって、
負荷を垂直方向に調節可能に取付けるピボットアーム(5)と、
第1の付力装置(13)とを含み、
前記ピボットアームは水平軸(9)を中心に旋回自在にピボットベース(3)にヒンジ結合され、
前記第1の付力装置(13)は、
その2つの作動端のうちの第1端が、前記水平軸(9)から間隔を開けて前記ピボットアーム(5)にヒンジ結合され、その2つの作動端のうちの第2端(17)が、前記水平軸(9)から垂直方向に距離(a)だけ離れた支持位置(49)において前記ピボットベース(3)上に移動可能に支持されて、前記ピボットアーム(5)上の前記負荷によって付与されるトルクを少なくとも部分的に補償する反トルクモーメントを付与し、
前記ピボットベース(3)には、水平方向を横切って延びる支持表面(27)が設けられ、前記支持表面(27)は、前記支持位置(49)が前記支持表面(27)に沿って移動可能な移動領域を有し、
前記支持表面(27)は、
前記支持位置(49)が前記移動領域中に配置され、前記ピボットアーム(5)が持ち上げられると、前記ピボットベース(3)に移動可能に支持された前記第1の付力装置(13)の前記第2端(17)に下向きの偏向力(45)が作用して前記支持位置(49)を移動させ、前記ピボットアーム(5)が下げられると、前記ピボットベース(3)に移動可能に支持された前記付力装置(13)の前記第2端(17)に上向きの偏向力(45)が作用して前記支持位置(49)を移動させるように、前記移動領域中に配向され、
前記ピボット取付けアセンブリは、
前記下向き、または/および上向きの偏向力(45)に対する対抗力を生成する第2の付力装置(36)を含み、前記対抗力は、前記支持位置(49)が前記移動領域中の少なくとも一部領域に配置された状態で、前記ピボットベース(3)に移動可能に支持された前記第1の付力装置(13)の前記第2端(17)に作用することを特徴とするピボット取付けアセンブリ。 - 請求項1に記載のピボット取付けアセンブリにおいて、
前記第2の付力装置(36)は、前記ピボットベースに支持された前記第1の付力装置の第2端(17)が、その前記移動領域の中央からずれた場合に、前記第1の付力装置の前記第2端(17)に作用する対抗力を付与し、前記対抗力は前記中央へと向かう二重作用付力装置であることを特徴とするピボット取付けアセンブリ。 - 請求項1から2のいずれか1に記載のピボット取付けアセンブリにおいて、
前記第2の付力装置(36)は、少なくとも1つの圧力ばね(35,39;53,55)または/および張力ばねを含むことを特徴とするピボット取付けアセンブリ。 - 請求項1から3のいずれか1に記載のピボット取付けアセンブリにおいて、
前記移動領域をそれ自体垂直方向に移動させ、かつ前記反トルクモーメントを調整可能に変化させるドライブを含むことを特徴とするピボット取付けアセンブリ。 - 請求項4に記載のピボット取付けアセンブリにおいて、
前記反トルクモーメントは所定の範囲内で可変であり、前記第1の付力装置(13)および前記第2の付力装置(36)によって付与される力は、反トルクモーメントが小さい場合、前記支持位置(49)を移動させる前記偏向力(45)が前記第2の付力装置の最大対抗力より小さくなるように互いに調整されることを特徴とするピボット取付けアセンブリ。 - 請求項4または5に記載のピボット取付けアセンブリにおいて、
前記移動領域を前記支持表面(27,27c)の一部領域として限定するために一対のエンドストップ(33,37;57,58)を含み、前記一対のエンドストップ(33,37;57,58)は前記ドライブによって垂直方向に移動可能であることを特徴とするピボット取付けアセンブリ。 - 請求項4から6のいずれか1に記載のピボット取付けアセンブリにおいて、
前記ドライブ(30)は、その作動端の一方が、前記ピボットベース(3)上に支持された前記第1の付力装置の前記第2端(17)に連結され、その他方の作動端が前記ピボットベース(3)にスライド可能に支持され、両作動端間に前記第2の付力装置(36)が挿入されていることを特徴とするピボット取付けアセンブリ。 - 請求項4から6のいずれか1に記載のピボット取付けアセンブリにおいて、
前記ドライブ(30c;30d)は、その2つの作動端のうちの一方の作動端が前記ピボットベース(3c;3d)にスライド可能に支持され、その他方の作動端が前記ピボットベース(3c;3d)上に支持された前記第1の付力装置の第2端に連結され、両作動端間に前記第2の付力装置(36c;36d)が挿入されていることを特徴とするピボット取付けアセンブリ。 - 請求項6から8のいずれか1に記載のピボット取付けアセンブリにおいて、
前記2つのエンドストップの少なくとも一方は、前記第2の付力装置(36)の圧力ばね(35,39;53,55)によって設けられることを特徴とするピボット取付けアセンブリ。 - 請求項4から9のいずれか1に記載のピボット取付けアセンブリにおいて、
前記ドライブはスピンドルドライブであり、その前記スピンドル(29)は、その長手方向に沿って前記第2の付力装置(36)のコイルばね(35,39;53,55)を横切ることを特徴とするピボット取付けアセンブリ。 - 請求項4に記載のピボット取付けアセンブリにおいて、
前記支持表面(27d)は、前記ドライブ(30d)によって垂直方向に移動可能なキャリッジ(61)上に設けられることを特徴とするピボット取付けアセンブリ。 - 請求項1から11のいずれか1に記載のピボット取付けアセンブリにおいて、
前記支持表面(27)は、前記ピボットアーム(5)が水平位置から部分的に持ち上げられると、前記ピボットアーム(5)の延長方向を部分的に直交するように延びることを特徴とするピボット取付けアセンブリ。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10051892A DE10051892A1 (de) | 2000-10-19 | 2000-10-19 | Schwenkhalterungsanordnung |
| DE10051892.3 | 2000-10-19 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2002206612A JP2002206612A (ja) | 2002-07-26 |
| JP2002206612A5 JP2002206612A5 (ja) | 2005-06-30 |
| JP3998451B2 true JP3998451B2 (ja) | 2007-10-24 |
Family
ID=7660360
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001321522A Expired - Lifetime JP3998451B2 (ja) | 2000-10-19 | 2001-10-19 | ピボット取付けアセンブリ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US6523796B2 (ja) |
| EP (1) | EP1199508B1 (ja) |
| JP (1) | JP3998451B2 (ja) |
| DE (2) | DE10051892A1 (ja) |
Families Citing this family (47)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FI111047B (fi) * | 1999-12-01 | 2003-05-30 | Instrumentarium Corp | Nivelvarsijärjestely erilaisten lääketieteellisten kuvauslaitteiden liittämiseksi nivelletysti tukirakenteisiin |
| US6994306B1 (en) * | 2000-11-28 | 2006-02-07 | Constant Force Technology, Llc | Monitor support system |
| US7032870B2 (en) * | 2000-11-28 | 2006-04-25 | Ergotron, Inc. | Methods and apparatus for generating force and torque |
| DE10156318A1 (de) * | 2001-11-19 | 2003-05-28 | Zeiss Carl | Vorrichtung und Verfahren für wenigstens teilweisen Ausgleich eines Last-Drehmoments |
| US6997422B2 (en) * | 2002-08-21 | 2006-02-14 | Ergotron, Inc. | Stand |
| US7252277B2 (en) * | 2003-01-17 | 2007-08-07 | Ergotron, Inc. | Support arm |
| DE10314156B9 (de) * | 2003-03-28 | 2005-05-25 | Carl Zeiss | Schwenkhalterungsanordnung und Verfahren zum Steuern einer solchen |
| US20060185563A1 (en) | 2004-07-30 | 2006-08-24 | Sweere Harry C | Lift mechanism systems and methods |
| US9267639B2 (en) | 2003-05-20 | 2016-02-23 | Ergotron, Inc | Lift mechanism systems and methods |
| US20040250635A1 (en) * | 2003-05-20 | 2004-12-16 | Sweere Harry C. | Lift mechanism based on torque equalization principles |
| US7825766B2 (en) | 2008-07-25 | 2010-11-02 | Cooper Technologies Company | Touch safe fuse module with ampacity rejection |
| WO2005009888A2 (en) * | 2003-06-27 | 2005-02-03 | King Rex Joseph Jr | Varying force counterweight system |
| EP1660804A2 (en) * | 2003-08-01 | 2006-05-31 | Constant Force Technology, LLC | Mechanism based on torque equalization principles |
| US20050056509A1 (en) * | 2003-09-16 | 2005-03-17 | The Boeing Company | Shock isolation system |
| DE102004017970A1 (de) * | 2004-04-12 | 2005-10-27 | Leica Microsystems (Schweiz) Ag | Stativ, insbesondere für Operationsmikroskope, mit einem Kraftspeicherelement |
| DE102004017971A1 (de) * | 2004-04-12 | 2005-10-27 | Leica Microsystems (Schweiz) Ag | Stativ, insbesondere für Operationsmikroskope, mit einem Kraftspeicherelement |
| US20060070210A1 (en) * | 2004-09-30 | 2006-04-06 | Gateway | Counter balanced hinge assembly |
| DE602004011962T2 (de) * | 2004-12-09 | 2009-02-19 | University Of Dundee, Dundee | Armstütze für Operateur |
| AU2006236662B2 (en) * | 2005-04-15 | 2010-04-29 | Garrett W. Brown | Equipoising support apparatus |
| DE102005017487A1 (de) * | 2005-04-15 | 2006-10-19 | Sachtler Gmbh & Co. Kg | Federarm und Körperstativ |
| DE102005018552A1 (de) * | 2005-04-20 | 2006-11-02 | Huwil-Werke Gmbh Möbelschloss- Und Beschlagfabriken | Halteelement |
| US8342467B2 (en) * | 2005-10-04 | 2013-01-01 | Eric Ronald Stachowski | Apparatus for hand control, pressure amplification, and stabilization of medical and industrial devices |
| DE102005054010A1 (de) * | 2005-11-10 | 2007-05-24 | Carl Zeiss Surgical Gmbh | Haltevorrichtung mit Gewichtsausgleich |
| DE102006004126B4 (de) * | 2006-01-25 | 2007-11-29 | Karl Storz Gmbh & Co. Kg | Chirurgische Armstütze |
| US8228668B2 (en) * | 2006-07-26 | 2012-07-24 | Ergotron, Inc. | Balanced moment lift system and method |
| US7621565B2 (en) * | 2006-08-14 | 2009-11-24 | Component Concepts International, Llc | Container mounting assembly |
| WO2009029693A1 (en) * | 2007-08-30 | 2009-03-05 | Brown Garrett W | Articulated human arm support |
| DE102008060725B4 (de) | 2008-12-05 | 2010-11-04 | Carl Zeiss Surgical Gmbh | Stativ zur Halterung einer Last und Mikroskopiesystem |
| US20110248138A1 (en) * | 2010-04-09 | 2011-10-13 | Sik Leung Chan | Device positioning supports |
| US8724037B1 (en) | 2010-06-04 | 2014-05-13 | Kurt William Massey | Mounting system |
| US9625091B1 (en) | 2014-12-06 | 2017-04-18 | Kurt William Massey | Adjustable mounting systems for televisions |
| US10281080B1 (en) | 2010-06-04 | 2019-05-07 | Kurt William Massey | Adjustable mounting systems for televisions |
| US8864092B2 (en) | 2010-08-04 | 2014-10-21 | Brian Newville | Television mount assembly |
| CN102374370B (zh) * | 2010-08-12 | 2016-03-02 | 深圳市莫孚康技术有限公司 | 一种弹簧臂装置 |
| WO2013148352A1 (en) | 2012-03-30 | 2013-10-03 | Ergotron, Inc. | Counterbalancing lift mechanisms and methods |
| US9321615B2 (en) * | 2013-04-02 | 2016-04-26 | Snap-On Incorporated | Panel hoist |
| CN104279412B (zh) * | 2013-07-02 | 2016-09-14 | 王铁 | 平视、仰视一步快速转换支架 |
| US9834421B2 (en) * | 2013-11-15 | 2017-12-05 | Ronald E. Raper, Jr. | System, apparatus, and method for the transport and positioning of a display |
| CN107351120B (zh) * | 2016-05-10 | 2023-11-10 | 尚可 | 重力负载平衡臂及机械臂 |
| US10845000B2 (en) * | 2016-10-21 | 2020-11-24 | Colebrook Bosson Saunders (Products) Limited | Display support system |
| US10738941B2 (en) | 2017-09-04 | 2020-08-11 | Manehu Product Alliance, Llc | Display mount assembly |
| US10859201B2 (en) | 2018-04-10 | 2020-12-08 | Manehu Product Alliance, Llc | Display mount assembly |
| WO2020115881A1 (ja) * | 2018-12-06 | 2020-06-11 | オリンパス株式会社 | 保持装置 |
| US11033107B2 (en) | 2019-07-16 | 2021-06-15 | Francis Douglas Warren | Tilting mounting apparatus |
| WO2021127552A1 (en) | 2019-12-19 | 2021-06-24 | Manehu Product Alliance, Llc, D/B/A | Adjustable display mounting system |
| CA3167490A1 (en) | 2020-02-10 | 2021-08-19 | Brian Newville | Multidirectional display mount |
| JP2022064770A (ja) * | 2020-10-14 | 2022-04-26 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッド | 撮像システム |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2353760A1 (fr) * | 1976-05-31 | 1977-12-30 | Muttelet Raymond | Equilibreur elastique de charges |
| DE3513999C1 (de) * | 1985-04-18 | 1986-10-09 | Deutsche Gesellschaft für Wiederaufarbeitung von Kernbrennstoffen mbH, 3000 Hannover | Fernbedienbare Positionier- und Traegervorrichtung fuer Fernhantierungsgeraete |
| GB2222939A (en) * | 1988-08-19 | 1990-03-28 | Microcomputer Accessories Inc | Adjustable CRT support stand |
| DE3921857A1 (de) | 1989-07-04 | 1991-01-17 | Wild Leitz Ag | Mit zusatzvorrichtungen ausgestattetes stativ fuer die halterung eines frei positionierbaren geraetes |
| IT1234767B (it) * | 1989-09-01 | 1992-05-26 | C M S S P A Costruzioni Macchi | Apparecchiatura per la movimentazione a distanza di una telecamera per riprese televisive speciali |
| US5253832A (en) * | 1991-07-26 | 1993-10-19 | Bolas Mark T | Spring counterbalanced boom suspension system |
| CA2162873A1 (en) * | 1993-05-25 | 1994-12-08 | Ken John Bryan | Bicyle rack |
| US5746404A (en) * | 1996-02-15 | 1998-05-05 | Merko; Andrew V. | Apparatus for counterbalancing equipment |
| DE19711572B4 (de) | 1997-03-20 | 2006-09-07 | Carl Zeiss | Operationsmikroskopstativ |
| US6082552A (en) * | 1997-09-04 | 2000-07-04 | Gear Up Technologies Corporation | Wall-mounted storage device |
| JP2000172183A (ja) * | 1998-12-02 | 2000-06-23 | Okamura Corp | ディスプレイ支持装置 |
-
2000
- 2000-10-19 DE DE10051892A patent/DE10051892A1/de not_active Withdrawn
-
2001
- 2001-10-17 EP EP01124782A patent/EP1199508B1/de not_active Expired - Lifetime
- 2001-10-17 DE DE50110225T patent/DE50110225D1/de not_active Expired - Lifetime
- 2001-10-19 JP JP2001321522A patent/JP3998451B2/ja not_active Expired - Lifetime
- 2001-10-19 US US10/040,978 patent/US6523796B2/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| EP1199508A3 (de) | 2004-04-21 |
| EP1199508B1 (de) | 2006-06-21 |
| DE10051892A1 (de) | 2002-04-25 |
| DE50110225D1 (de) | 2006-08-03 |
| EP1199508A2 (de) | 2002-04-24 |
| US6523796B2 (en) | 2003-02-25 |
| JP2002206612A (ja) | 2002-07-26 |
| US20020100851A1 (en) | 2002-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3998451B2 (ja) | ピボット取付けアセンブリ | |
| JP2002206612A5 (ja) | ||
| CA2604934A1 (en) | Equipoising support apparatus | |
| US4659052A (en) | Vertical adjustment support device for a vehicle seat | |
| KR20070115254A (ko) | 모니터 스탠드 | |
| JPS60146997A (ja) | 垂直位置調節可能なスタンド | |
| CN111609284B (zh) | 支撑装置和电子设备 | |
| US8272672B2 (en) | Suspension device | |
| US4807836A (en) | Vertical and pivotal adjusting apparatus for drafting tables | |
| JPS63256792A (ja) | カレンダのローラを案内する装置 | |
| JP2522605B2 (ja) | 調節可能なステアリングコラム | |
| JP4489210B2 (ja) | ディスプレイ支持装置 | |
| JP5064774B2 (ja) | グラインダ保持装置 | |
| US5501658A (en) | Massage table roller mechanism | |
| CA2512842A1 (en) | Gyratory compactor apparatus and associated devices and methods | |
| US4580884A (en) | Stand apparatus for supporting medical instrument | |
| JPH10218588A (ja) | 作業用アームのバランス装置 | |
| JP3847161B2 (ja) | 制振装置を備えた工作機械 | |
| JPH11285990A (ja) | 補助ローラ台 | |
| CN214467449U (zh) | 一种显示器支臂 | |
| CN219684609U (zh) | 汽车牵引支架中心孔车削固定工装 | |
| CN220912606U (zh) | 一种机动车零部件冲击试验装置 | |
| JPH07165378A (ja) | エレベータ案内装置 | |
| CN216783845U (zh) | 一种可调节的遥控器托盘 | |
| JPS632232Y2 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041014 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041014 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20041014 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20061124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20061205 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20070226 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20070301 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070523 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070710 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070807 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 3998451 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100817 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110817 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110817 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120817 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120817 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130817 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |