JP3953889B2 - 回転角検出装置とその温度補正方法 - Google Patents
回転角検出装置とその温度補正方法 Download PDFInfo
- Publication number
- JP3953889B2 JP3953889B2 JP2002155651A JP2002155651A JP3953889B2 JP 3953889 B2 JP3953889 B2 JP 3953889B2 JP 2002155651 A JP2002155651 A JP 2002155651A JP 2002155651 A JP2002155651 A JP 2002155651A JP 3953889 B2 JP3953889 B2 JP 3953889B2
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- rotation angle
- output voltage
- rotor
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/20—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature
- G01D5/204—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils
- G01D5/2073—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils by movement of a single coil with respect to two or more coils
- G01D5/208—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils by movement of a single coil with respect to two or more coils using polyphase currents
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D3/00—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups
- G01D3/028—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups mitigating undesired influences, e.g. temperature, pressure
- G01D3/032—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups mitigating undesired influences, e.g. temperature, pressure affecting incoming signal, e.g. by averaging; gating undesired signals
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Power Steering Mechanism (AREA)
Description
【発明の属する技術分野】
本発明は、回転角検出装置とその温度補正方法、特にその導出方法に関するものである。
【0002】
【従来の技術】
従来のレゾルバを用いて回転角を検出する回転角検出装置としては、例えば特願2002-127173号公報(以下、従来例と称す)に記載されているものがある。従来例には、図5に示す様に、励磁コイル122とcos相コイル128と、sin相コイル130を共通のアース線146を用いてアースした場合、sin相コイル130の端子136には、振幅がロータの回転角θのsin値に依存して増減する交流の回転角電圧に加えて、アース線146のインピーダンス144と励磁電流に起因する交流のバイアス電圧が重畳された電圧が出力されることが記述されている。この結果、sin相コイル130の端子136から出力される電圧から得られるロータ122の回転角の検出精度が低下してしまうという問題が生じる。この課題を解決するために従来例では、基準タイミングからの経過時間との関係で交流バイアス電圧を算出するのに必要なデータを記憶している記憶手段と、sin相コイル130の出力電圧から、記憶手段に記憶されているデータより算出される「基準タイミングから前記出力電圧の検出時までの経過時間だけ経過した時の交流バイアス電圧」を減算する減算手段を備えた回転角検出装置が開示されている。
【0003】
【発明が解決しようとする課題】
しかしながら、上記従来例にあっては、時々刻々変化する温度変化に対しては充分な考慮がされておらず、そのため高精度な回転角を検出できないという未解決の課題がある。
【0004】
そこで、本発明は、上記従来例の未解決の課題に着目してなされたものであり時々刻々変化する温度変化による回転角誤差をなくし、高精度な回転角検出装置を提供することを目的としている。
【0005】
【課題を解決するための手段及び作用と効果】
上記目的を達成するため、請求項1記載の回転角検出装置では、回転するロータと、ロータに固定されており、一端に交流の励磁電流が印加され、他端にアース線が接続されている励磁コイルと、ロータの周囲に固定されており、一端から出力電圧が取り出され、他端に前記アース線が接続されており、振幅がロータの回転角に依存して増減する交流の回転角電圧に、アース線のインピーダンスと励磁電流に起因する交流バイアス電圧が重畳した電圧を出力するステータコイルを有する回転角検出装置において、基準タイミングからの経過時間との関係で、温度に依存する要素の値を算出するのに必要なデータを記憶している記憶手段と、前記記憶手段に記憶されるデータを減算する減算手段によって前記交流の回転角電圧を求める回転角電圧検出手段と、前記記憶手段に記憶されるデータを加算する加算手段によって前記交流バイアス電圧を求めるバイアス検出手段と、前記回転角電圧検出手段と、前記バイアス検出手段から少なくとも異なった2点以上でサンプリングした値で交流回転角電圧の振幅値と、交流回転角電圧の基準タイミングに対する位相差および交流バイアス電圧の振幅値と、交流バイアス電圧の基準タイミングに対する位相差を求める手段を備えたことを技術的特徴とする。
【0006】
また、上記目的を達成するため、請求項2記載の回転角検出装置では、ロータが回転したときの前記出力電圧を順次サンプリングして記憶する手段と、記憶された出力電圧群の中で最大ピーク値を含む少なくとも1周期分の第1出力電圧群を特定する手段と、記憶された出力電圧群の中で最大ボトム値を含む少なくとも1周期分の第2出力電圧群を特定する手段と、特定された前記第1出力電圧群と前記第2出力電圧群について、基準タイミングからの経過時間が等しい第1出力電圧と第2出力電圧を順次減算する手段および加算する手段を備えたことを技術的特徴とする。
【0007】
上記特徴を備えた請求項1および請求項2の発明は次のように作用する。ロータはステータコイルに対して回転する。励磁コイルはロータの周囲に固定されており、一端に交流の励磁電流が印加され、他端にアース線が接続されている。ステータコイルはロータの周囲に固定されており、一端から出力電圧が取り出され、他端にアース線が接続されている。ステータコイルの一端に生じる出力電圧は、振幅がロータの回転角に依存して増減する交流の回転角電圧に、アース線のインピーダンスと励磁電流に起因する交流バイアス電圧が重畳した電圧となる。温度に依存する要素の値を算出するのに必要なデータを記憶しているデータ記憶手段は、基準タイミングからの経過時間との関係で、交流回転角電圧と交流バイアス電圧を算出するのに必要なデータを記憶している。
【0008】
必要なデータを記憶する方法は、ロータが回転したときの出力電圧を順次サンプリングして記憶する手段であり、また記憶された出力電圧群の中で最大ピーク値を含む少なくとも1周期分の第1出力電圧群を特定する手段と、記憶された出力電圧群の中で最大ボトム値を含む少なくとも1周期分の第2出力電圧群を特定する手段とを有している。この特定された第1出力電圧群と第2出力電圧群について、基準タイミングからの経過時間が等しい第1出力電圧と第2出力電圧を順次減算する手段および加算する手段を用いて交流の回転角電圧を求める回転角電圧検出手段と、記憶手段に記憶されるデータを加算する加算手段によって交流バイアス電圧を求めるバイアス検出手段と、回転角電圧検出手段と、バイアス検出手段から少なくとも異なった2点以上でサンプリングした値で演算した交流回転角電圧の振幅値と、交流回転角電圧の基準タイミングに対する位相差および交流バイアス電圧の振幅値と、交流バイアス電圧の基準タイミングに対する位相差を求める。
【0009】
これらの交流回転角電圧の振幅値と、交流回転角電圧の基準タイミングに対する位相差および交流バイアス電圧の振幅値と、交流バイアス電圧の基準タイミングに対する位相差を使用することによって、時々刻々変化する温度変化に影響されない高精度な回転角検出装置が得られる。
【0010】
本発明の温度補正方法は、振幅がロータの回転角に依存して増減する交流の回転角電圧に、アース線のインピーダンスと励磁電流に起因する交流バイアス電圧を重畳して電圧を出力することによって回転角検出装置の出力電圧に影響を与える温度補正を行なうことにより具現化される。
この方法によると、ロータを回転させながら出力電圧を順次サンプリングすることで、サンプリングした出力電圧群の中で最大ピーク値を含む少なくとも1周期分の第1出力電圧群を特定することができる。また、サンプリングした出力電圧群の中で最大ボトム値を含む少なくとも1周期分の第2出力電圧群も特定することができる。この特定された第1出力電圧群と第2出力電圧群について、基準タイミングからの経過時間が等しい第1出力電圧と第2出力電圧を順次減算して交流回転角電圧を求めることができる。また、基準タイミングからの経過時間が等しい第1出力電圧と第2出力電圧を順次加算して交流バイアス電圧を求めるこができる。交流回転角電圧と交流バイアス電圧から少なくとも異なった2点以上でサンプリングした値で交流回転角電圧の振幅値と、交流回転角電圧の基準タイミングに対する位相差および交流バイアス電圧の振幅値と、交流バイアス電圧の基準タイミングに対する位相差を求めることができる。この求められた交流回転角電圧の振幅値と位相差および交流バイアス電圧の振幅値と位相差を使用することにより、時々刻々変化する温度変化に影響されない高精度な回転角検出装置が得られる。
【0011】
【発明の実施の形態】
図1に電動パワーステアリングシステム10の構成を示す。このシステム10には、ECU20と第1レゾルバ15sで構成される第1回転角検出装置と、ECU20と第2レゾルバ16sで構成される第2回転角検出装置が含まれている。また、これらのECU20、第1レゾルバ15sおよび第2レゾルバ16sによって運転者のハンドル操舵をトルク値に変換して検出するトルク検出装置が構成されている。この電動パワーステアリングシステム10では、ハンドル11がハンドル軸12の一端側が接続されており、ハンドル軸12の他端側には、トーションバー14の一端側に接続されている。トーションバー14の他端側には、出力軸を介してピニオン軸13の一端側が接続されている。ピニオン軸13のピニオンはラック19と噛合っている。ラック19とラックハウジング18Hによってラック機構18が構成されている。ラック機構18によって、ラック19はラックハウジング18H内を軸方向に往復動するようになっている。ラック機構18の両端には、タイロッド21の一端が装着されている。タイロッド21の他端には、ナックルアーム22が連結されている。ナックルアーム22の他端には車輪23が連結されている。
【0012】
上記したハンドル軸12の下端側の周囲には、第1レゾルバ15sが設けられている。第1レゾルバ15sはハンドル軸12の第1回転角θ1を検出する第1回転角の検出部として機能する。トーションバー14の下端側の周囲には、第2レゾルバ16sが設けられている。第2レゾルバ16sはピニオン13の第2回転角θ2を検出する第2回転角の検出部として機能する。第1レゾルバ15sと第2レゾルバ16sはECU20に電気的に接続されている。ECU20、第1レゾルバ15sおよび第2レゾルバ16sによってトルク検出装置が構成されている。トルク検出装置を構成するECU20は第1レゾルバ15sで検出した第1回転角θ1と第2レゾルバ16sで検出した第2回転角θ2から運転者がハンドル11を操舵することで発生した操舵トルク値T=K(θ1−θ2)を演算する。尚Kはトーションバー14のバネ定数である。ECU20はモータMに接続されており、演算したトルク値Tを所定のトルク/電流値変換のマップにより得られた指令電流を電流制御部を通してPWM(パルス幅変調)制御する。トルク検出装置30、15s、16sのより具体的な構成については後述する。モータMは発生したアシストトルクを減速機17を経由してラック機構18に伝達する。
【0013】
この電動パワーステアリングシステム10の動作を説明する。まず、運転者がハンドル11を操舵すると、ハンドル軸12が回転する。ハンドル軸12が回転するとトーションバー14を介してピニオン軸13も回転する。ピニオン軸13が回転するとそのピニオンと噛合ったラック19が軸方向に動き、タイロッド21とナックルアーム22を介して車輪23の走向方向が変化する。運転者がハンドル11を操舵することで発生したトルクは、トルク検出装置30、15s、16sによって検出される。トルク検出装置を構成するECU20はこのトルクに基づいてモータMを制御する。
【0014】
トルク検出装置30、15s、16sが検出した操舵トルクが小さいと、ECU20はモータMに小さなアシストトルクを発生させるように制御する。トルク検出装置30、15s、16sが検出した操舵トルクが大きいと、ECU20はモータMに大きなアシストトルクを発生させるように制御する。モータMで発生したアシストトルクはラック機構18に伝達され、ラック19の動きを補助する。従って運転者は軽い力でハンドル11を操舵することができる。
【0015】
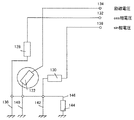
図2にトルク検出装置30のブロック図を示す。トルク検出装置30は、上述したようにECU20と第1レゾルバ15sで構成される第1回転角検出装置と、ECU20と第2レゾルバ16sで構成される第2回転角検出装置を含む。ECU20はCPU52と、CPU52と内部バス53を介して接続されたROM56、RAM58およびEEPROM(電気的消去可能ROM)59で構成されている。CPU52は入力ポート52b〜52eや出力ポート52a等のポートを有している。入力ポート52b〜52eはCPU52の内部でA/D変換器に接続され、アナログ信号がデジタル信号に変換されCPU52で処理される。また出力ポート52aはCPU52の内部でD/A変換器に接続され、デジタル信号がアナログ信号に変換され、第1レゾルバ15sや第2レゾルバ16sおよびモータMに出力される。ROM56には、後述する温度補正の導出処理を行なうためのプログラムやトルク算出のためのプログラム等が格納されている。
【0016】
第1レゾルバ15sは第1ロータ31と、第1励磁コイル32と、第1sin相コイル(ステータコイル)34と、第1cos相コイル(ステータコイル)36等を備えている。第2レゾルバ16sは第2ロータ41と、第2励磁コイル42と、第2sin相コイル(ステータコイル)43と、第2cos相コイル(ステータコイル)44等を備えている。第1ロータ31は第1励磁コイル32を有する。第1ロータ31の回転に伴って第1励磁コイル32も回転する。本実施例では具体的な図示は省略するが、回転角検出精度を高めるため、第1ロータ31の機械的な回転角に対して、電気角が8倍となるようにロータコイル群が配置されている。電気角が8倍とするため、N極とS極の対が4つ構成され、一般的にはギアなどで機械的に行なう増速を電気的に行なっており、回転角の分解能は4倍となる。なお、以下で「回転角」というときは特に断りがない限りこの電気角を意味するものとする。
【0017】
第1レゾルバ15sの第1励磁コイル32は、第1ロータ31のスロットに巻かれている。この第1励磁コイル32は、一端側ではCPU52の出力ポート52aから交流の励磁電圧(後述する式(1))が印加され、他端には共通アース線46が接続されている。また、第2レゾルバ16sの第2励磁コイル42は、第2ロータ41のスロットに巻かれている。この第2励磁コイル42にも一端側ではCPU52の出力ポート52aから交流の励磁電圧(後述する式(1))が印加され、他端には共通アース線46が接続されている。従って、共通アース線46には、第1励磁コイル32に流れる第1励磁電流と、第2励磁コイル42に流れる第2励磁電流を合計した電流が流れる。以下では、この第1励磁電流と第2励磁電流を合計した電流を単に「励磁電流」という。励磁コイル32、42はロータ31、41に内蔵されている図示しないコイルと相俟って変圧器を構成する。その図示しないコイルに発生する電圧によって、ロータコイル群32、42に励磁電圧が印加される。本実施例では外部から第1ロータ31および第2ロータ41のロータコイル群32、42に励磁電圧を印加する方法として非接触式の変圧器を記述したが、接触式のブラシを用いてもよい。
【0018】
励磁電圧は式(1)で表わされる。
Ve=Esinωt (1)
励磁電流は式(2)で表わされる。
Ie=Isin(ωt+β) (2)
ここで、E:励磁電圧の振幅(volt)、ω:励磁電圧の角速度(rad/s)
I:励磁電流の振幅(amp)、β:励磁電流の励磁電圧に対する位相差(rad)である。なお、励磁電圧の角速度ωにはω=2π/Pの関係があり、この時のPは周期(s)である。本実施例ではP=200μsに設定されている。
【0019】
第1レゾルバ15sの第1cos相コイル36は第1ロータ31と同心上で第1ロータ31の周囲に固定されているステータのスロット内に巻かれている。この第1cos相コイル36は、一端に生じた第1cos相電圧がCPU52の入力ポート52bに入力され、他端には共通アース線46が接続されている。第1cos相電圧(後述する式(5))は、振幅が第1ロータ31の回転角θ1のcos値に依存して増減する交流の回転角電圧(後述する式(3))に、共通アース線46のインピーダンス48と励磁電流に起因する交流のバイアス電圧(後述する式(4))が重畳した電圧である。
【0020】
第1cos相電圧の回転角電圧は式(3)で表わされる。
Vcos1=EK(T)sin(ωt+α(T))cos(θ1) (3)
バイアス電圧は式(4)で表わされる。
Vbias=R(T)Isin(ωt+β(T)) (4)
第1cos相電圧は式(3)と式(4)を加算した式(5)で表わされる。
Vcos1T= EK(T)sin(ωt+α(T))cos(θ1)+ R(T)Isin(ωt+β(T)) (5)
ここで、K(T):トランス効率(無単位)、α(T):第1cos相電圧の励磁電圧に対する位相差(rad)、θ1:第1ロータの第1回転角(rad)、R(T):共通アース線のインピーダンス(Ω)である。また記号の後ろに(T)が付加されているものは、その状態が温度に影響されることを示している。
【0021】
次に、第1レゾルバ15sの第1sin相コイル34は第1ロータ31と同心上で第1ロータ31の周囲に固定されているステータのスロット内に先に記述した第1cos相コイル36と電気角で90度の位相差を持って巻かれている。この第1sin相コイル34は、一端に生じた第1sin相電圧がCPU52の入力ポート52cに入力され、他端には共通アース線46が接続されている。第1sin相電圧(後述する式(7))は、振幅が第1ロータ31の回転角θ1のsin値に依存して増減する交流の回転角電圧(後述する式(6))に、共通アース線46のインピーダンス48と励磁電流に起因する交流のバイアス電圧(前述した式(4))が重畳した電圧である。
【0022】
第1sin相電圧の回転角電圧は式(6)で表わされる。
Vsin1=EK(T)sin(ωt+α(T))sin(θ1) (6)
第1sin相電圧は式(6)と式(4)を加算した式(7)で表わされる。
Vsin1T= EK(T)sin(ωt+α(T))sin(θ1)+ R(T)Isin(ωt+β(T)) (7)
ここで、使用した記号は式(1)〜式(5)で説明したものと同様である。
【0023】
第2レゾルバ16sの第2cos相コイル44、第2sin相コイル43も、共通のアース線46に接続されている。その他の基本的な構成についても第1レゾルバ15sと同様であるため、説明を省略する。
【0024】
またこのように、第1レゾルバ15sの第1励磁コイル31、第1cos相コイル36、第1sin相コイル34と、第2レゾルバ16sの第2励磁コイル42、第2cos相コイル44、第2sin相コイル43は共通のアース線46に接続されてアースされているので、別々の6本のアース線に接続する場合に比べて配線数を大幅に減少できる。
【0025】
次に、本実施例のトルク検出装置30を用いて温度の影響を補正する処理内容を説明する。本実施例では補正処理をリアルタイムに実施する例を示すが、補正処理はある時間間隔で実施しても、また温度補正処理開始のトリガ等がかかったときに実施しても勿論よい。
まず、励磁電圧の印加開始後に、運転者が図1に示すハンドル11を回転させて、第1ロータ31の電気角θ1を0〜360度まで回転させたとする。この回転動作が行なわれると回転動作中、CPU52は50μsのサンプリング間隔で第1レゾルバ15sの第1sin相電圧をサンプリングして、そのデータをRAM58に格納する。
【0026】
サンプリングした第1sin相電圧データ群を横軸を回転角θ1とし、縦軸を電圧値としてプロットすると図3に示す様に振幅がsin(θ1)に依存して増減する交流波形となる。但し、実際には図3に示す波形より波長の非常に短い波形である。例えば励磁電圧の回転周波数を5KHZとすると周期は200μsとなり実際に回転させられるハンドル1周期に5000パルスの波形が含まれることになる。
【0027】
CPU52は、第1sin相電圧データ群のうち、最大ピーク値を含む電圧データ群を検出する処理を行なう。回転角電圧にバイアス電圧が重畳した出力電圧がピーク値となる電気角では、回転角電圧もピーク値となる。回転角電圧がピーク値となるのはsin(θ1)=1、即ち電気角θ1=90度のときである。本実施例では、電気角θ1が89.5度〜90.5度の範囲(1度)に含まれる電圧データ群をサンプリングする。イメージ的には図3の範囲L1のデータをサンプリングする。またCPU52は、第1sin相電圧データ群のうち、最大ボトム値を含む電圧データ群を検出する処理を行なう。回転角電圧にバイアス電圧が重畳した出力電圧がボトム値となる電気角では、回転角電圧もボトム値となる。回転角電圧がボトム値となるのはsin(θ1)=−1、即ち電気角θ1=270度のときである。本実施例では、電気角θ1が269.5度〜270.5度の範囲(1度)に含まれる電圧データ群をサンプリングする。イメージ的には図3の範囲L2のデータをサンプリングする。
【0028】
図4(a)、(b)は横軸を時間とし、縦軸を電圧としたグラフである。図4(a)は最大ピーク値付近の第1sin相電圧データ群と、これを構成する回転角電圧およびバイアス電圧を示す。図4(b)は最大ボトム値付近の第1sin相電圧データ群と、これを構成する回転角電圧およびバイアス電圧を示す。図4(a)、(b)は、それぞれ図3の範囲L1と範囲L2の時間軸を拡大して示したものである。図4のPは第1sin相電圧の周期であり、本実施例では200μsである。図4のτはCPU52による第1sin相電圧のサンプリング間隔であり、本実施例では50μsである。
【0029】
上記のようにして最大ピーク値を含む何周期分かの第1sin相電圧データ群と、同じく最大ボトム値を含む何周期分かの第1sin相電圧データ群をサンプリングした後、基準タイミングからの経過時間が等しいデータ同士を順次減算する。本実施例では基準タイミングを励磁電圧の印加開始時からの時間経過が周期Pの整数倍のタイミングになるようにしている。上記減算値を2で割ることにより温度要素を含んだ回転角電圧が算出される。
【0030】
次に上記と同じく最大ピーク値を含む何周期分かの第1sin相電圧データ群と、同じく最大ボトム値を含む何周期分かの第1sin相電圧データ群をサンプリングした後、基準タイミングからの経過時間が等しいデータ同士を順次加算する。上記加算値を2で割ることにより温度要素を含んだバイアス電圧が算出される。
【0031】
上記手段により算出された回転角電圧を構成している回転角速度にかかる時間を2点とり、その時の回転角電圧値を読み取る。すると回転角電圧を構成している温度要素を含んだ2つのパラメータの値が求まる。また同じく上記手段により算出されたバイアス電圧を構成している回転角速度にかかる時間を2点とり、その時のバイアス電圧値を読み取る。するとバイアス電圧を構成している温度要素を含んだ2つのパラメータの値が求まる。以上求められた温度要素を含んだ4つのパラメータを使用することによって、いかなる時間に読み込んだ回転角も実時間の温度変化の影響を受けない高精度な角度情報となる。
【0032】
上記の内容を一般式で説明すると次のようになる。最大ピーク値の第1sin相電圧データ群の一般式(8)と、最大ボトム値の第1sin相電圧データ群の一般式(9)は次の式で表わされる。
Vsin1max= EK(T)sin(ωt+α(T))sin(90度)+ R(T)Isin(ωt+β(T)) (8)
Vsin1min= EK(T)sin(ωt+α(T))sin(270度)+ R(T)Isin(ωt+β(T)) (9)
式(8)から式(9)を減算して2で割ると、
(Vsin1max− Vsin1min)/2=EK(T)sin(ωt+α(T))が、即ち温度要素を含んだ回転角電圧が求まり、時間tを変えて最低2点を測定すれば、K(T)、α(T)が求まる。
また、式(8)と式(9)を加算して2で割ると、
(Vsin1max+ Vsin1min)/2=R(T)Isin(ωt+β(T))が、即ち温度要素を含んだバイアス電圧が求まり、時間tを変えて最低2点を測定すれば、R(T)、β(T)が求まる。
【0033】
前述した式(7)について、Vsin1Tは第1sin相電圧として入力ポートを介してCPU52に取り込まれる値である。またE、ω、IはEEPROMに記憶されている値であり、温度に依存する要素K(T)、α(T)、R(T)、β(T)も前述の演算で算出されている。それらを使って式(7)を変形してみると、
sin(θ1)={ Vsin1T −R(T)Isin(ωt+β(T))}/EK(T)sin(ωt+α(T))
となり温度変化に影響されないθ1を求めることが出来る。
【0034】
以上、本発明の具体例を詳細に説明したが、これらは例示に過ぎず、特許請求の範囲を限定するものではない。特許請求の範囲に記載の技術には、以上に例示した具体例を様々に変形、変更したものが含まれる。
(1)上記実施例では、回転角検出装置を2つ備えたトルク検出装置に本発明を適用した例を説明したが、トルク検出装置ではない回転角検出装置に適用しても勿論よい。
(2)本レゾルバは励磁コイルが回転子側に1本あり、出力コイルが固定子側に2本ある構成を示したが、励磁コイルが固定子側に2本あり、出力コイルが回転子側に1本または2本ある構成のレゾルバに適用しても勿論よい。
【0035】
【発明の効果】
以上説明したように、本発明に係る回転角検出装置とその温度補正の導出方法によれば、最大ピーク値を含む何周期分かの第1sin相電圧データ群と、同じく最大ボトム値を含む何周期分かの第1sin相電圧データ群をサンプリングして回転角電圧とバイアス電圧を算出している。そしてこの2つの電圧を使用して温度に依存する要素のパラメータ値を算出できるので、時々刻々変化する温度変化の影響を受けない高精度な回転角が得られるという効果が得られる。
【図面の簡単な説明】
【図1】電動パワーステアリングシステム構成図を示す。
【図2】トルク検出装置のブロック図を示す。
【図3】ロータの電気角360度回転時の出力電圧のグラフ図を示す。
【図4】最大ピーク値及び最大ボトム値と各電圧波形を示す。
【図5】従来の回転角検出装置のブロック図を示す。
【符号の説明】
15s:第1レゾルバ
16s:第2レゾルバ
20:ECU
30:トルク検出装置
31:第1ロータ
32:第1励磁コイル
34:第1sin相コイル
36:第1cos相コイル
41:第2ロータ
42:第2励磁コイル
43:第2sin相コイル
44:第2cos相コイル
Claims (3)
- 回転するロータと、ロータに固定されており、一端に交流の励磁電流が印加され、他端にアース線が接続されている励磁コイルと、
ロータの周囲に固定されており、一端から出力電圧が取り出され、他端に前記アース線が接続されており、振幅がロータの回転角に依存して増減する交流の回転角電圧に、アース線のインピーダンスと励磁電流に起因する交流バイアス電圧が重畳した電圧を出力するステータコイルを有する回転角検出装置において、
基準タイミングからの経過時間との関係で、温度に依存する要素の値を算出するのに必要なデータを記憶している記憶手段と、
前記記憶手段に記憶されるデータを減算する減算手段によって前記交流の回転角電圧を求める回転角電圧検出手段と、
前記記憶手段に記憶されるデータを加算する加算手段によって前記交流バイアス電圧を求めるバイアス検出手段と、
前記回転角電圧検出手段と前記バイアス検出手段とから、少なくとも異なった2点以上でサンプリングした値で交流回転角電圧の振幅値と交流回転角電圧の基準タイミングに対する位相差、および交流バイアス電圧の振幅値と交流バイアス電圧の基準タイミングに対する位相差を求める手段を備えた回転角検出装置。 - ロータが回転したときの前記出力電圧を順次サンプリングして記憶する手段と、
記憶された出力電圧群の中で最大ピーク値を含む少なくとも1周期分の第1出力電圧群を特定する手段と、
記憶された出力電圧群の中で最大ボトム値を含む少なくとも1周期分の第2出力電圧群を特定する手段と、
特定された前記第1出力電圧群と前記第2出力電圧群について、基準タイミングからの経過時間が等しい第1出力電圧と第2出力電圧を順次減算する手段および加算する手段を備えたことを特徴とする請求項1に記載の回転角検出装置。 - 振幅がロータの回転角に依存して増減する交流の回転角電圧に、アース線のインピーダンスと励磁電流に起因する交流バイアス電圧が重畳した電圧を出力する回転角検出装置の出力電圧に影響を与える温度に対する温度補正方法であって、
ロータを回転させながら前記出力電圧を順次サンプリングする第1工程と、
サンプリングした出力電圧群の中で最大ピーク値を含む少なくとも1周期分の第1出力電圧群を特定する第2工程と、
サンプリングした出力電圧群の中で最大ボトム値を含む少なくとも1周期分の第2出力電圧群を特定する第3工程と、
特定された前記第1出力電圧群と前記第2出力電圧群について、基準タイミングからの経過時間が等しい前記第1出力電圧と前記第2出力電圧を順次減算して交流回転角電圧を求める第4工程と、
基準タイミングからの経過時間が等しい前記第1出力電圧と前記第2出力電圧を順次加算して交流バイアス電圧を求める第5工程と、
前記第4工程と、前記第5工程から少なくとも異なった2点以上でサンプリングした値で前記交流回転角電圧の振幅値と、前記交流回転角電圧の基準タイミングに対する位相差および前記交流バイアス電圧の振幅値と、前記交流バイアス電圧の基準タイミングに対する位相差を求める第6工程と、
を有する温度補正方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002155651A JP3953889B2 (ja) | 2002-05-29 | 2002-05-29 | 回転角検出装置とその温度補正方法 |
| US10/506,679 US7138795B2 (en) | 2002-05-29 | 2003-05-28 | Rotation angle detector and its temperature correcting method |
| EP03730652A EP1508783B1 (en) | 2002-05-29 | 2003-05-28 | Rotational angle detector and its temperature correcting method |
| PCT/JP2003/006630 WO2003100353A1 (fr) | 2002-05-29 | 2003-05-28 | Detecteur d'angle de rotation et son procede de correction de temperature |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002155651A JP3953889B2 (ja) | 2002-05-29 | 2002-05-29 | 回転角検出装置とその温度補正方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003344109A JP2003344109A (ja) | 2003-12-03 |
| JP3953889B2 true JP3953889B2 (ja) | 2007-08-08 |
Family
ID=29561429
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002155651A Expired - Fee Related JP3953889B2 (ja) | 2002-05-29 | 2002-05-29 | 回転角検出装置とその温度補正方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7138795B2 (ja) |
| EP (1) | EP1508783B1 (ja) |
| JP (1) | JP3953889B2 (ja) |
| WO (1) | WO2003100353A1 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4473778B2 (ja) * | 2005-05-18 | 2010-06-02 | 日立オートモティブシステムズ株式会社 | 回転角検出装置 |
| DE102005047958A1 (de) * | 2005-10-06 | 2007-06-14 | Jungheinrich Ag | Antriebs- und Lenkvorrichtung für ein Flurförderzeug |
| JP4979352B2 (ja) | 2006-02-28 | 2012-07-18 | 日立オートモティブシステムズ株式会社 | レゾルバ/デジタル変換器及び該レゾルバ/デジタル変換器を用いた制御システム |
| US7562591B2 (en) * | 2006-06-26 | 2009-07-21 | KRS Technologies Co. | Steering angle sensor |
| JP5041419B2 (ja) * | 2007-12-28 | 2012-10-03 | 東芝機械株式会社 | レゾルバ装置およびレゾルバの角度検出装置とその方法 |
| JP5040805B2 (ja) * | 2008-05-19 | 2012-10-03 | 株式会社ジェイテクト | 回転角度検出装置 |
| US8115152B1 (en) | 2008-06-03 | 2012-02-14 | ADIC, Inc. | Method of operating a photoconductor in an imaging system, and read-out circuit employing an AC-biased photoconductor |
| JP2010048760A (ja) * | 2008-08-25 | 2010-03-04 | Jtekt Corp | レゾルバの異常検出装置および電気式動力舵取装置 |
| JP5267031B2 (ja) * | 2008-10-09 | 2013-08-21 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| EP2657667B1 (en) * | 2010-12-24 | 2016-03-30 | Toyota Jidosha Kabushiki Kaisha | Torque detection device |
| JP6489780B2 (ja) * | 2014-09-25 | 2019-03-27 | アイシン精機株式会社 | 制御装置 |
| JP6550793B2 (ja) | 2015-02-27 | 2019-07-31 | 株式会社ジェイテクト | 温度検出装置及び回転角検出装置 |
| JP2018061350A (ja) * | 2016-10-05 | 2018-04-12 | ルネサスエレクトロニクス株式会社 | 半導体装置、モータ制御システム、及び半導体装置の制御方法 |
| CN110987027B (zh) * | 2019-11-14 | 2022-03-04 | 北京航天时代光电科技有限公司 | 一种双通道多对极旋转变压器的组合解算方法和系统 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3851330A (en) * | 1973-02-20 | 1974-11-26 | Trw Inc | Amplitude-to-phase conversion circuit |
| JP2515891B2 (ja) * | 1989-09-20 | 1996-07-10 | 株式会社日立製作所 | 角度センサ及びトルクセンサ、そのセンサの出力に応じて制御される電動パワ―ステアリング装置 |
| JP3173531B2 (ja) * | 1992-09-18 | 2001-06-04 | ソニー株式会社 | 位置検出方法 |
| JP3624458B2 (ja) * | 1995-04-10 | 2005-03-02 | 多摩川精機株式会社 | ディジタル角度検出方法 |
| US5710509A (en) * | 1995-10-30 | 1998-01-20 | Atsutoshi Goto | Phase difference detection device for an inductive position detector |
| JP3589080B2 (ja) * | 1999-03-30 | 2004-11-17 | 豊田工機株式会社 | トルク検出装置 |
| JP4355395B2 (ja) * | 1999-05-19 | 2009-10-28 | 株式会社アミテック | 位置検出データ生成方法及び装置 |
| KR100519521B1 (ko) * | 1999-10-07 | 2005-10-05 | 무라타 기카이 가부시키가이샤 | 굽힘기계 및 그 운전방법 |
| JP2002127173A (ja) | 2000-10-23 | 2002-05-08 | Neoex Lab Inc | 中空構造物の補強具 |
| JP3630410B2 (ja) * | 2001-05-22 | 2005-03-16 | 三菱電機株式会社 | 位置検出装置および異常検出装置 |
| JP3982319B2 (ja) | 2002-04-26 | 2007-09-26 | 株式会社ジェイテクト | 回転角検出装置の補正に用いるバイアス電圧の導出方法 |
-
2002
- 2002-05-29 JP JP2002155651A patent/JP3953889B2/ja not_active Expired - Fee Related
-
2003
- 2003-05-28 EP EP03730652A patent/EP1508783B1/en not_active Expired - Lifetime
- 2003-05-28 WO PCT/JP2003/006630 patent/WO2003100353A1/ja active Application Filing
- 2003-05-28 US US10/506,679 patent/US7138795B2/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003344109A (ja) | 2003-12-03 |
| EP1508783A4 (en) | 2005-12-28 |
| WO2003100353A1 (fr) | 2003-12-04 |
| EP1508783A1 (en) | 2005-02-23 |
| US7138795B2 (en) | 2006-11-21 |
| US20050127280A1 (en) | 2005-06-16 |
| EP1508783B1 (en) | 2011-12-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3953889B2 (ja) | 回転角検出装置とその温度補正方法 | |
| US6694287B2 (en) | Phase angle diagnostics for sinusoidal controlled electric machine | |
| KR102099075B1 (ko) | 각 위치 센서들에서의 에러 정정을 위한 시스템 및 방법 | |
| JP4923730B2 (ja) | レゾルバ角度検出における補償方法及びこれを用いた角度検出装置 | |
| JP5051404B2 (ja) | トルク検出装置 | |
| US7298967B2 (en) | Electromagnetic sensor direct communication algorithm to a digital microprocessor | |
| CN105811838B (zh) | 用于测量eps电机位置传感器的偏移的装置和方法 | |
| JP6669318B2 (ja) | 電動パワーステアリング装置、及び電動パワーステアリング装置用モータの回転角検出方法 | |
| EP1424264A2 (en) | Angle detection device and torque sensor incorporating angle detection device | |
| JP2009156852A (ja) | レゾルバ装置およびレゾルバの角度検出装置とその方法 | |
| JP4916556B2 (ja) | 回転角度検出装置、回転電機装置および電動パワーステアリング装置 | |
| CN102564294A (zh) | 旋转角度检测装置 | |
| CN104426439B (zh) | 用于监测电机的旋转位置的方法和设备 | |
| JP7066306B2 (ja) | 回転角度検出装置、および当該回転角度検出装置を含む電動パワーステアリング装置 | |
| JP4269278B2 (ja) | ブラシレスモータの回転トルク方向検出装置 | |
| EP3588768A1 (en) | Position detector | |
| JP3982319B2 (ja) | 回転角検出装置の補正に用いるバイアス電圧の導出方法 | |
| JP2002350181A (ja) | レゾルバ及び回転角検出装置 | |
| JP5712724B2 (ja) | トルク検出装置および電動パワーステアリング装置 | |
| JP3847656B2 (ja) | 角度検出装置における温度検出方法、角度検出装置及び角度検出装置を備えたアクチュエータ制御システム | |
| JP3408238B2 (ja) | レゾルバ/デジタル変換装置および変換方法 | |
| KR101268266B1 (ko) | 차량의 조향장치용 동기모터의 위치센서 | |
| JPS5941190A (ja) | デジタル式界磁極位置検出装置 | |
| JPS62173950A (ja) | 誘導電動機の瞬時トルク測定装置 | |
| JP2000055606A (ja) | 位置検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040804 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20060228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070328 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070425 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 3953889 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110511 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110511 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120511 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120511 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130511 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140511 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |