JP3875889B2 - 画像式速度検知システム及び画像式速度検知方法 - Google Patents
画像式速度検知システム及び画像式速度検知方法 Download PDFInfo
- Publication number
- JP3875889B2 JP3875889B2 JP2002012051A JP2002012051A JP3875889B2 JP 3875889 B2 JP3875889 B2 JP 3875889B2 JP 2002012051 A JP2002012051 A JP 2002012051A JP 2002012051 A JP2002012051 A JP 2002012051A JP 3875889 B2 JP3875889 B2 JP 3875889B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- speed
- direct measurement
- image
- output
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Image Processing (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
Description
【発明の属する技術分野】
本発明は、画像式速度検知システムに関し、さらに詳しくは、撮像手段により撮影された車両についての画像情報に基づいて、車両の位置と速度を検出する画像式速度検知システムに関するものである。
【0002】
【従来の技術】
道路上を移動する車両が交差点の停止線を通過する時点において信号機が青である場合は、基本的に交差点に進入した速度を維持して安全に交差点外に出ることができる。しかし、交差点の停止線に達する手前の上流側のエリアで信号が青から黄に変化した場合、車両の進入速度と、現在位置によっては、通過の途中で赤になってしまう可能性がある。このような時、車両の運転者は停止しようか進もうか迷ってしまい、ジレンマに陥ってしまうことがある。このようなジレンマによる迷いは、判断ミスや運転操作の誤りをもたらし、これが事故につながることがある。このような場合、少しでも安全性を確保するために、その車両の現在位置と、その位置での速度に応じて青信号の点灯時間を長くするように制御するジレンマ感応制御という制御方法により制御される信号機が知られている。例えば、図10の従来のジレンマ感応制御では、停止線77の上流150m付近に設置した速度感知器71から得られる車両の計測速度をもとに、黄信号を表示する予定の時点78における車両の位置と速度を推定し制御を行っている。つまり、車両73が感知機設置位置71から進入した場合、信号機は車両73が推定位置75で停止することができると判断して、黄信号を表示する予定の時点78で信号を黄に変化させる。しかし、推定位置75(車両72の速度と位置)と実際の車両70の走行位置76との間に推定誤差74が発生する。この誤差により現行のジレンマ感応制御が有効に機能しないことがある。
この対策として図11のように、ジレンマゾーンに車両が存在するか否かは、黄信号を表示する予定の時点における車両の位置と速度で判定する。つまり、車両81が直接計測エリア82に侵入したとき、停止線83から車両までの位置と速度を計測して信号を制御するようにする。従って、黄信号を表示する予定の時点84において、当該流入リンクに存在するすべての車両(図では車両80と81)の位置と速度を直接計測することができれば、計測誤差は残るものの、車両の位置及び速度の推定が不必要となり、前記の問題点を解決することができる。しかし、既存の感知器ではスポットで計測しており、残りのエリアはエリア内のスポットでの計測結果から推定することで信号制御を行っていた。この方式を用いると、推定するエリアが大きくなるほど推定誤差が大きくなり、そのために信号制御の効果が出ない場合がある。
【0003】
また、従来発明として特許第151372号公報には、簡便に物体(例えば車両)の移動速度を検出する装置及び方法について開示されている。これによると、時間間隔T毎に物体が移動する所定の領域を撮影する撮影手段と、撮影手段により撮影された時間間隔T毎の画像情報の各画素の明度情報を物体の移動方向に沿った軸に射影し、軸上に各明度値を蓄積することにより、一次元射影情報を生成する射影手段と、射影手段からの一次元射影情報を記憶する記憶手段と、記憶手段に記憶された一次元射影情報を用いて、所定の領域内を移動する物体の速度を検出する検出手段とを有する移動物体速度検出装置が開示されている。
また、特開2001−256485公報には、画像監視装置における車種判別の精度を向上させる技術について開示されている。これによると、画像上に領域を設定し、その領域を車両が通過している間のその領域の画像濃度(画像の輝度の濃度)の時系列データ、その領域のエッジ濃度(画像の輝度を微分処理することで求めたエッジの輝度の濃度)の時系列データを記憶し、車両の走行速度とこれらの時系列データから車種を判別するものである。
【0004】
【発明が解決しようとする課題】
しかしながら、従来のジレンマ感応制御によると、車両を計測する感知器がスポット計測方法であるため、残りのエリアはエリア内のスポットでの計測結果から推定することで信号制御を行っていたため、推定するエリアが大きくなるほど推定誤差が大きくなり、信号制御の効果が出ない場合があった。
また、特許第151372号公報は、道路の中心線に撮影された画像の明度情報をスリット状に射影し、その総和を求めて1次元情報に変換し、その直線の傾きから速度を求めるものであり、画像による車両の位置と速度の推定は行っていない。
また、特開2001−256485公報は、車両の種別判定が主たる目的であり、車両の速度は車種を判別する一つのデータに過ぎず、テンプレートマッチングによる速度検出は行っているが、画像による車両の位置と速度の推定は行っていない。
本発明は、かかる課題に鑑み、撮像手段により得られた画像から車両を検出し、所定距離間隔に設定された直接計測断面から得られる確定速度から、車両の位置を一定時間間隔に推定し、前記直接計測断面間の実測値と推定値を比較することにより、位置精度と速度精度を高めた画像式速度検知システムを提供することを目的とする。
【0005】
【課題を解決するための手段】
本発明はかかる課題を解決するために、請求項1は、撮像手段により撮影された路上を移動中の車両についての画像情報を処理して該車両の速度と位置を検出する画像式速度検知システムにおいて、前記撮像手段により撮影された撮像エリア内の車両及び周辺の画像を格納する画像格納手段と、該画像格納手段により格納された画像情報に基づいて画像認識により車両を検出する車両検出手段と、前記車両の走行中の位置と速度を計測する位置・速度計測手段と、前記車両の位置と速度を確定する直接計測断面と、該直接計測断面により確定した前記車両の位置と速度を信号装置に出力する位置・速度出力手段とを備え、前記車両検出手段により車両として検出された場合、該検出された位置から前記車両が前記直接計測断面を通過するまでに要した時間と距離に基づいて前記位置・速度計測手段により前記車両の位置と速度を計測し、該計測結果を前記位置・速度出力手段により前記信号装置に出力すると共に、前記位置・速度出力手段からの出力結果を元にして、前記直接計測断面を通過後の車両の位置と速度を一定時間間隔毎に推定し、前記直接計測断面は前記撮像エリア内に少なくとも1つ以上設定され、前記各直接計測断面の手前には前記車両を検出する車両検出エリアと前記車両の速度を計測するために前記車両を追跡する車両追跡エリアが設けられ、前記直接計測断面から次の直接計測断面までの間は、前記直接計測断面で確定された前記車両の位置と速度を元にして、次の直接計測断面までの間の前記車両の位置と速度を推定し、該推定結果を一定時間間隔毎に前記位置・速度出力手段に出力することを特徴とする。
撮像手段は一般的にはビデオカメラであり、交差点の手前から所定のエリアを撮影するように設定されている。撮影するエリアは路面であるため、時間、周辺状況、季節により変化する被写体である。例えば、昼間と夜では周辺の明るさ、あるいは交通量が異なり、また、周辺が住宅街か否かによっても周りからの照明量が異なる。さらに、季節が異なれば当然路面状況は大きく変化する。例えば、冬に雪が降れば全く異なる状況を呈することになる。従って、この状態での画像情報を一旦メモリに格納し、その格納された画像情報から車両についての画像情報のみを画像処理により抽出することが必要となる。本発明では画像処理の詳しい説明は省略するが、いずれにしても車両についての画像情報を得られた全ての画像情報中から検出し、その車両が一定の距離走行した時間から速度を計測する。この方法は、車両として検出された位置から所定の位置までの時間から容易に測定することができる。そして、その結果(速度と位置)を出力手段に出力する。ここまでは、従来の技術として公知であるが、本発明は前記出力手段に出力した速度を元にしてそれ以降の車両の位置を一定時間間隔毎に推定するところに特徴がある。また、従来では、交差点の停止線上流に存在するジレンマゾーン内を通過する車両の位置と速度を、可能な限り正確に計測するために感知器の数を増やさなければならなかった。その結果、システム全体のコストを高くしていた。そこで、画像により直接計測断面を複数設定し、各直接計測断面では正確な車両の検出と速度を計測するために、その手前に車両を検出するエリアと車両を追跡して速度を測定するエリアを設け、移動体が車両であることを正確に検出し、以後のデータが無駄にならないようにする。また、従来の方法では、直接計測断面を多くすれば計測の精度を上げることができる。しかし、その分感知器の数が増加してシステムのコストを高騰させる。このように、従来の感知器では台数を増やすしか精度を上げる方法がなかったが、画像を使うことにより1台で直接計測断面を増やすことができる。その反面、直接計測断面が多くなった分精度は高くなるが、画像処理の負荷が大きくなるため推定を入れている。つまり、直接計測断面と次の直接計測断面の間では車両の位置と速度データは発生されないため、その間の車両の位置と速度のデータを得ることができない。従って、間隔が大きくなればその分誤差が累積して大きくなる。これを補正するために、直接計測断面を通過した車両の速度から計算により位置と速度を推定し、その推定値を一定時間間隔に出力することにより、あたかも直接計測断面が多くなったことと等価にする方法である。
【0006】
かかる発明によれば、前記車両検出手段により車両として検出された場合、該検出された位置から前記車両が前記計測断面を通過するまでに要した時間と距離から前記速度計測手段により前記車両速度を計測し、該計測結果を前記速度出力手段により出力すると共に、前記計測断面を通過後の車両位置は、前記速度出力手段からの出力結果に基づいて一定時間間隔毎に推定し、前記直接計測断面は前記撮像エリア内に少なくとも1つ以上設定され、前記各直接計測断面の手前には前記車両を検出する車両検出エリアと前記車両の速度を計測するために前記車両を追跡する車両追跡エリアが設けられ、前記直接計測断面から次の直接計測断面までの間は、該直接計測断面で確定された前記車両の位置と速度を元にして前記車両の位置と速度を推定し、該推定結果を一定時間間隔に前記位置・速度出力手段に出力するため、複数の測定ポイントが設定可能となり、車両速度を精度良く測定することができ、車両検出精度が高くして以後のデータの信頼性を高めることができ、しかも、装置のトータルコストを安くすることができる。また、画像処理の負荷を少なくして測定精度の低下を抑えることができる。
【0008】
請求項2では、前記直接計測断面からの計測結果及び前記推定結果の出力は、一定時間間隔で連続して前記位置・速度出力手段に出力されることも本発明の有効な手段である。位置・速度出力手段は信号機の制御回路に対して、確定した車両の位置と速度データを送る。そして、制御回路はそのデータから車両の位置と速度を判断し、信号機を制御している。従って、位置・速度出力手段からのデータ量が多いほど正確性は高くなる。また、一定間隔でしかも連続してくるデータに対しては処理が容易となり、制御回路の負荷を軽くすることができる。
かかる技術手段によれば、前記計測断面からの計測結果と前記推定結果の出力は、一定時間間隔で連続して前記位置・速度出力手段に出力されるので、データの正確性が高くなると共に制御回路の負荷を軽くすることができる。
請求項3では、前記位置・速度出力手段が前記車両の位置を推定する場合、前記直接計測断面から前記位置・速度出力手段への出力遅延時間を見込んで推定することも本発明の有効な手段である。システムの構成形態により必ずしも全ての装置が1箇所に集約されるとは限らない。むしろ、画像検知器と信号制御機はお互いに離れた位置に設置されるのが一般的である。そのような場合、必ず信号の遅延現象が発生し、処理速度が速いほどこの影響は大きくなる。そこで、予め遅延時間を測定しておき、その遅延時間を見込んで処理する必要がでてくる。
かかる技術手段によれば、前記車両の位置を推定する場合、前記計測断面から前記位置・速度出力手段への出力遅延時間を見込んで推定するようにすれば、遅延時間による位置と速度の誤差を最小限にすることができる。
【0009】
請求項4は、前記直接計測断面として認めた所定の範囲内で前記車両の計測結果及び前記推定結果が得られた場合、前記計測結果を前記直接計測断面における確定結果として前記位置・速度出力手段に出力することも本発明の有効な手段である。直接計測断面は車両の位置と速度を確定する重要なポイントである。このポイントは可能な限り狭いほうがその正確性は増すが、狭くすればするほど、車両の検出が困難となる。この相反する問題を解決するために直接計測断面にある程度幅を持たせ、その範囲内であれば有効とする。これに基づき、直接計測断面の所定の範囲内で車両の計測結果と推定結果の両方が得られた場合は、追跡した正しい車両の計測結果であると判断して、推定結果を破棄してこの計測結果を確定計測データとする。
かかる技術手段によれば、前記直接計測断面の所定の範囲内で前記車両の計測結果及び前記推定結果が得られた場合、前記計測結果を前記直接計測断面における確定結果として前記位置・速度出力手段に出力することにより、直接計測断面ごとに推定値と計測値の誤差を補正することができる。
請求項5では、前記直接計測断面として認めた所定の範囲内で前記車両の計測結果が得られず、所定の時間経過後に前記車両が検出されない場合、以後の推定を打ち切ることも本発明の有効な手段である。直接計測断面の所定の範囲内で車両の計測結果が得られない場合がある。これは、追跡中の車両が途中で停車したか、あるいは、車線変更して撮像エリアから外れた場合が考えられる。このような場合、推定結果と測定結果を比較することが不可能となるので、直接計測断面手前の車両検出エリアで車両が検出されなければ推定を打ち切らざるを得ない。
かかる技術手段によれば、前記直接計測断面の所定の範囲内で前記車両の計測結果が得られず、所定の時間経過後に前記車両が検出されない場合、以後の推定を打ち切ることにより、無駄な処理を実行することを防ぐことができる。
【0010】
請求項6では、画像式速度検知器が所定の距離に複数設置され、前記撮像エリア内の最後の直接計測断面にて前記車両の位置と速度を確定後、前記撮像エリアの視野外に車両が出た場合、前記最後の直接計測断面から得られた速度に基づいて前記視野外の車両の位置と速度を推定することも本発明の有効な手段である。交差点の規模によっては撮像エリアが広すぎて1台の検知器ではカバーしきれない場合がある。そのような時は複数の検知器を設置して夫々の検知器が受け持つ撮像エリアを決めて撮影する。そして、撮像エリア内の最後の直接計測断面以降の直接計測断面は次の検知器が受け持つ。その場合、複数の検知器からの測定結果を1つのデータとして連続して出力するためには、撮像エリア内の最後の直接計測断面にて速度を確定した後、車両が撮像エリアの視野外に出た場合、前記確定速度に基づきそれ以降の推定を行い、次の検知器に継続するようにする。
かかる技術手段によれば、画像式速度検知器が所定の距離に複数設置され、前記撮像エリア内の最後の直接計測断面にて前記車両の位置と速度を確定後、前記撮像エリアの視野外に車両が出た場合、前記最後の直接計測断面から得られた速度に基づいて前記視野外の車両の位置と速度を推定することにより、複数の検知器を使用した場合でも連続した測定データを出力することができる。
請求項7では、前記直接計測断面から得られる前記計測結果及び推定結果を前記位置・速度出力手段に出力し、該出力が信号機の表示にリアルタイムに反映されることも本発明の有効な手段である。前述したように、位置・速度出力手段の信号は信号機の制御回路にそのデータを送る。そして、制御回路はそのデータから車両の速度を判断し、信号機を制御している。従って、車両からのデータに即座に反応して信号機が制御されないと、車両と信号機とのマッチングが取れなくなる。つまり、システムとしてリアルタイム性が強く要求される。
かかる技術手段によれば、前記直接計測断面から得られる前記計測結果及び推定結果を前記位置・速度出力手段に出力し、該出力が信号機の表示にリアルタイムに反映されるので、車両と信号機とのマッチングをとることができる。
【0011】
請求項8では、前記撮像エリア内に対向する車両が存在する場合、それぞれの車両に対して個別に前記直接計測断面間における前記車両の位置と速度を推定することも本発明の有効な手段である。1車線の狭い道路の場合、撮像エリアを1つの撮像手段でカバーすることができる。しかも、このような道路では車両が対向して通行する場合が多く、対向車両の位置と速度を同時に処理することができれば、コスト的にも安いシステムを構築することができる。
かかる技術手段によれば、前記撮像エリア内に対向する車両が存在する場合、それぞれの車両に対して個別に前記直接計測断面間における前記車両の位置と速度を推定するため、コスト的に安いシステムを構築することができる。
請求項9は、撮像手段により撮影された車両の画像情報を処理して該車両の速度と位置を検出する画像式速度検知方法において、前記撮像手段により撮影された撮像エリア内の車両及び周辺の画像情報を格納するステップと、格納された画像情報から画像認識により車両を検出するステップと、前記車両の位置と速度を計測するステップと、前記車両の位置と速度を確定する直接計測断面と、確定された前記車両の位置と速度を出力するステップとを備え、前記車両を検出するステップにより車両として検出された場合、該検出された位置から前記撮像エリア内を前記車両が前記直接計測断面を通過するまでに要した時間と距離から前記車両の位置と速度を計測すると共に、前記直接計測断面を通過後の車両の位置と速度は、前記計測結果を元にして一定時間間隔毎に推定し、前記直接計測断面は前記撮像エリア内に少なくとも1つ以上設定され、前記各直接計測断面の手前には前記車両を検出する車両検出エリアと前記車両の速度を計測するために前記車両を追跡する車両追跡エリアが設けられ、前記直接計測断面から次の直接計測断面までの間は、前記直接計測断面で確定された前記車両の位置と速度を元にして、次の直接計測断面までの間の前記車両の位置と速度を推定し、該推定結果を一定時間間隔毎に前記位置・速度出力手段に出力することを特徴とする。
かかる発明によれば、請求項1と同様の作用効果を奏する。
【0012】
【発明の実施の形態】
以下、本発明を図に示した実施形態を用いて詳細に説明する。但し、この実施形態に記載される構成要素、種類、組み合わせ、形状、その相対配置などは特定的な記載がない限り、この発明の範囲をそれのみに限定する主旨ではなく単なる説明例に過ぎない。
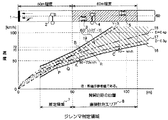
図1は、ジレンマ感応制御について説明するための模式図の一例である。本発明ではこのジレンマ感応制御を基本にして、従来の課題を解決するために直接計測エリア8内の車両速度と位置を正確に計測する技術を提案するものである。従って、再度ジレンマ感応制御について詳細に説明し、その課題と問題点を明確にしておく。まず、図1の構成は、2車線の路面60があり、その路面上の左端に設けられた交差点の停止線1と、停止線1の上流50mの所定の位置に設置されたカメラ2と、さらに上流の60m程度の直接計測エリア8内を走行する車両3と、車両5と、そのエリア内の所定の位置に設置されたカメラ4により構成され、この場合のジレンマ感応制御について説明する。路面60の下には、縦軸に車両の速度(Km/h)、横軸に路面と一致した位置に黄信号開始時の位置(m)を示す2次元座標が表示されている。
【0013】
次に、図1を参照して動作について説明する。直接計測エリア8内を走行する車両が停止または通過すべきかという判断が運転者にとって困難な状態になるジレンマゾーン6(ハッチング部)内に存在するか否かの判定は、その時の車両の走行位置と走行速度により決定される。そして、この判定は停止線1の上流20〜100mの区間を対象に行われ、図のジレンマゾーン6はブレーキの反応遅れ1.0秒、ブレーキをかけた時の減速度D=0.3g、0、4g(gは重力加速度)、現状の交差点での黄信号の現示時間Y=3秒の場合も併せて表示している。図1において、車両3が図の位置で信号が黄に変わった場合、ジレンマ状態となる速度は、車両3の先端の位置から下に下ろした点線とグラフ16、19との交点A、Bの範囲となる。つまり、ジレンマ状態となる速度は、縦軸の50〜72Km/hの範囲であり、それ以外の速度、つまり、50Km/h以下であれば停止線1の手前で停止が可能であり、72Km/h以上の速度であれば、信号が赤になる前に交差点を通過することが可能である。また、車両5が図の位置で信号が黄に変わった場合、ジレンマ状態となる速度は、車両5の先端の位置から下に下ろした点線とグラフ16との交点Cの範囲となる。つまり、縦軸の70Km/h以上であり、それ以外の速度つまり、70Km/h以下であれば停止線1の手前で停止が可能である。
また、現示時間Y=3秒の場合は、点線の直線グラフY=3となり、例えば車両3がこの直線との交点Rの速度(70Km/h)を境にそれ以上の速度であれば信号が赤に変わる前に通過できる。また、図で減速度D=0.3g(一点鎖線17)の場合は、点線の直線グラフY=3との交点Pを境に右側の囲まれた領域がジレンマゾーンであり、減速度D=0.4g(二点鎖線18)の場合は、点線の直線グラフY=3との交点Qを境に右側の囲まれた領域がジレンマゾーンとなる。つまり、減速度D=0.3g(一点鎖線17)の場合は、ブレーキが弱くジレンマゾーンが広い。それに対して、減速度D=0.4g(二点鎖線18)の場合は、ブレーキが強くジレンマゾーンが狭くなっている。また、この図で推定領域7は後述するように、直接計測エリア8の終端からの車両の位置と速度を推定する領域である。このように、直接計測エリア8内の車両がジレンマゾーン6に入るか否かの判定の精度は、その車両の走行位置と走行速度を如何に正確に測定できるかにかかっている。従来は、この測定を感知器3でスポット的に計測した速度に対して予測して速度を判断していたため、予測値と実測値の間に誤差が生じて、信号制御の効果が出ない場合が生じていた。
【0014】
図2は、本発明の一実施形態に係る画像式速度検知システムの構成ブロック図である。この構成は、一般的にはCCDによるカメラで構成され、計測エリアの画像を撮影する撮像部10と、撮像部10で撮影されたアナログ画像データをデジタル信号に変換するA/D変換部11と、デジタル信号に変換された信号を多値階調データとして格納する多値メモリ部12と、多値メモリ部12のデータを所定のフレーム単位に取り出し、その画像から影や周辺の不要部分を取り除いて画像処理を行い車両を検出する車両検出部13と、車両と検出された位置から所定の位置までの距離と時間から車両の速度を計測する速度計測部14と、計測した車両の位置と速度を図示しない信号制御部に出力する速度出力部15とから構成されている。
以上のように、撮像部10は一般的にはビデオカメラであり、交差点の手前から直接計測エリアを撮影するように設定されている。撮影するエリアは路面であるため、時間、周辺状況、季節により変化する被写体である。例えば、昼間と夜では周辺の明るさ、あるいは交通量が異なり、また、周辺が住宅街か否かによっても周りからの照明量が異なる。さらに、季節が異なれば当然路面状況は大きく変化する。例えば、冬に雪が降れば全く異なる状況を呈することになる。従って、この状態での画像を一旦多値メモリ12に格納し、その格納された画像から車両のみを画像処理により抽出することが必要となる。本発明では画像処理の詳しい説明は省略するが、いずれにしても得られた全ての画像情報中から車両についての画像情報を車両検出部13により検出し、その車両が一定の距離走行した時間から速度を速度計測部14により計測する。この方法は、車両として検出された位置から所定の位置までの時間から容易に測定することができる。そして、その結果(速度と位置)を速度出力部15に出力する。ここまでは、従来の技術として公知であるが、本発明は速度出力部15に出力した速度を元にして、それ以降の車両の位置を一定時間間隔毎に推定するところに特徴がある。これにより、複数の測定ポイントが設定可能となり、車両速度を精度良く測定することができる。
【0015】
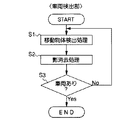
次に、本構成による画像式速度検知システムの概略動作について図7、8、9のフローチャートと併せて参照しながら説明する。撮像部10で撮影された路面上の車両はモノクロのアナログ信号としてA/D変換部11に入力される。A/D変換部11では、そのアナログ信号を処理しやすいデジタル信号に変換する。そして、デジタル信号は画像の濃淡に応じて、例えば256階調に分解されて、512×480画素の画像として多値メモリ部12に格納される。車両検出部13は図7のように、格納された画像から移動物体を検出する処理を行い(S1)、その移動物体から影や周辺の不要画像を取り除き(S2)、その中から車両の画像を抽出する(S3)。そして、撮像部10で撮影された画像が車両であると認識されると、その時点から速度計測部14が車両画像を追跡する。その方法はテンプレートマッチング法と呼ばれ、図8のように図7で検出された車両をテンプレートとして登録し(S10)、所定のエリアをサーチエリアとして設定する(S11)。次に、ステップS10で登録したテンプレートと比較し、一致しているかを確認する(S12)。そして、一致していれば追跡車両であると認識して、その車両が一定距離進んだかを判断する(S13)。進んだことを確認すると、後述する直接計測断面までの時間から車両の速度を計測し(S14)、その結果を速度出力部15に出力する。ここまでは最初の車両検出エリアから直接計測断面までの動作であり、本発明ではこれ以降の動作に対して特徴を備えたものである。つまり、図9により速度出力部15では、まず、速度計測部14で確定速度が算出されたか否かを監視し(S20)、算出されると確定速度と確定位置を出力する(S21)。次に、最初の直接計測断面かを検出するために以前に確定速度が算出されたか否かをみる(S22)。算出されていなければ、最初の直接計測断面であるので、推定を行わないで終了する。ステップS22で、以前に確定速度が算出された場合、確定速度を元に現在の車両の位置を推定する(S23)。次に、今回の確定位置が推定位置と近いか否かを判定し(S24)、近くなければ以前の確定速度と今回の推定位置を出力する(S25)。ステップS24で近ければ、推定出力を中止して今回の確定位置を出力する(S26)。このように前記直接計測断面で確定した速度と位置を元にして、次の直接計測断面までの位置を所定間隔毎に推定して速度出力部15に連続的に信号を出力し、次の直接計測断面に到達した時点で推定値と実測値を比較して、実測値が得られた場合は、その実測値を車両の位置と速度として確定して次の推定を継続するものである。
【0016】
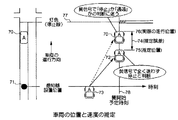
次に、本発明を更に詳しく説明するために図3と図4を参照して説明する。図3は車両が直接計測断面手前の車両検出エリアと車両追跡エリアに進入した様子を表した模式図である。本発明では、直接計測断面手前で移動体を車両であると確実に検出することと、その速度を正確に計測するため各直接計測断面手前全てに車両検出エリア22と車両追跡エリア23設けられている。図のように車両検出エリア22と車両追跡エリア23を設定する。車両検出エリア22で車両検出部13により車両を検出し、車両追跡エリア23内に車両が存在する間はその車両を追跡する。例えば、車両20が車両検出エリア22上にあるとき、車両検出部13が車両として検出した場合、そのときの位置をL1、そのときの時刻をT1とする。そして、車両追跡エリア23で車両20を追跡し、直接計測断面24に車両20が到達したときの位置をL2そのときの時間をT2とすると、車両20の速度は、
V=[L1−L2]/[T1−T2]・・・(1)
で求めることができる。この計算は速度計測部14により行われる。また、車両追跡エリア23の下端を直接計測断面24とし、この位置を車両が通過したときに車両の速度と位置を確定し、(それぞれ確定速度、確定位置と呼ぶ)、その結果が速度出力部15に出力される。
このように、従来では、交差点の停止線上流に存在するジレンマゾーン内を通過する車両の位置と速度を、可能な限り正確に計測するために感知器の数を増やさなければならず、その結果、システム全体のコストを高くしていた。そこで、画像により直接計測断面を複数設定し、各直接計測断面では正確な車両の検出と速度を計測するために、その手前に車両を検出するエリアと車両を追跡して速度を測定するエリアを設け、移動体が車両であることを正確に検出し、以後のデータが無駄にならないようにする。これにより、車両検出精度を高くして以後のデータの信頼性を高めることができ、しかも、装置のトータルコストを低くすることができる。
また、図3では一方向の車両の場合について説明したが、対向車両についても適用できることはいうまでもない。つまり、1車線の狭い道路の場合、撮像エリアを1つの撮像手段でカバーすることができる。しかも、このような道路では車両が対向して通行する場合が多く、対向車両の速度を同時に処理することができれば、コスト的にも安いシステムを構築することができる。また、車両の走行方向が逆の場合も同様に適用が可能である。
【0017】
次に、本発明の特徴である位置の推定動作について説明する。図4は本発明の位置の推定動作を説明するための模式図である。同じ構成要素には同じ参照番号が付されている。図3で確定速度、確定位置が速度出力部15に出力された後、この確定速度、確定位置を用いて一定時間間隔で車両の位置の推定を行う。つまり、車両20が直接計測断面24を通過した時の確定速度は(1)式からVであり、確定位置は図3からL2である。そして時間T後の推定速度をV1とすると推定位置L3は、
L3=L2−V1×Tとなり、ここでV=V1とすると、
L3=L2−V×T・・・(2)
と推定できる。つまり、(2)式から推定位置は直接計測断面24を通過した時の確定速度Vから一義的に計算できる。このように前記(1)式から確定速度Vを求めることにより、直接計測断面24以降の車両の位置は、(2)式より容易に求めることができる。このように推定した車両の位置は次の直接計測断面まで続けられ、その信号が速度出力部15に連続して与えられる。また、それと同時に位置推定している車両に対して、次の直接計測断面手前の車両検出エリアと車両追跡エリアで前記(1)式により車両の速度と位置を測定して、推定位置と比較される。
また、システムの構成形態により必ずしも全ての装置が1箇所に集約されるとは限らない。むしろ、画像検知器と信号制御機はお互いに離れた位置に設置されるのが一般的である。そのような場合、必ず信号の遅延現象が発生し、処理速度が速いほどこの影響は大きくなる。そこで、予め遅延時間(t)を測定しておき、その遅延時間を見込んで処理する必要がでてくる。このときの(2)式は
L3=L2−V×(T+t)・・・(3)
となる。これにより、遅延時間による速度と位置の誤差を最小限にすることができる。
【0018】
以上のように、従来の方法では、直接計測断面を多くすれば計測の精度を上げることができる。しかし、その分感知器の数が増加してシステムのコストを高騰させる。このように、従来は感知器の台数を増やすしか精度を上げる方法がなかったが、画像を使うことにより1台で直接計測断面24を増やすことができる。その反面、直接計測断面24が多くなった分精度は高くなるが、画像処理の負荷が大きくなるため推定を入れている。つまり、直接計測断面と次の直接計測断面の間では車両の位置と速度データは発生されないため、その間の車両の位置と速度のデータを得ることができない。従って、間隔が大きくなればその分誤差が累積して大きくなる。これを補正するために、直接計測断面24を通過した車両20の速度から計算により位置と速度を推定し、その推定値を一定時間間隔に出力することにより、あたかも直接計測断面が多くなったことと等価にする方法である。これにより、画像処理の負荷を少なくして測定精度の低下を抑えることができる。
【0019】
図5は本発明の直接計測断面での出力のマッチングについて説明するための図である。この図は縦軸に車両の速度(Km/h)、横軸に車両の位置(m)をとり、黒丸は直接計測断面での車両の位置と速度を表し、白丸が推定値による速度と位置を表す。直接計測断面30での車両速度をV1とした場合、それ以降は速度V1一定として位置が31、32、33、34と推定される。そして、推定値34が次の直接計測断面35に到達した時に、直接計測断面35での車両の位置が36で、速度がV2であったとする。車両検出部13により車両であると検出されると、追跡した車両と同一であると判断され、車両の位置36のときの速度V2が実際の位置と速度であると判断され、推定値34は破棄されてこれ以降は車両の速度をV2として以下の推定が計算され、車両の位置が37、38、39と速度V2で移動する。この図では車両の位置36のときの速度V2がV1より低下しているが、逆にV1より早くなっても同様に処理される。
以上のように、直接計測断面35は車両の速度を確定する重要なポイントである。このポイントは可能な限り狭いほうがその正確性は増すが、狭くすればするほど、車両の検出が困難となる。この相反する問題を解決するために直接計測断面35にある程度幅を持たせ、その範囲内であれば有効とする考え方がある。これに基づき、直接計測断面35の所定の範囲内で車両の計測結果36と推定結果34の両方が得られた場合は、追跡した正しい車両の計測結果であると判断して、推定結果34を破棄してこの計測結果36を正しい計測データとする。これにより、計測結果36が追跡した正しい車両の計測結果であると判断することができる。また、直接計測断面35の所定の範囲内で車両の計測結果36が得られない場合がある。これは、追跡中の車両が途中で停車したか、あるいは、車線変更して撮像エリアから外れた場合が考えられる。このような場合、推定結果と測定結果を比較することが不可能となるので、直接計測断面手前の車両検出エリアで車両が検出されなければ推定を打ち切らざるを得ない。これにより、無駄な処理を実行することを防ぐことができる。
【0020】
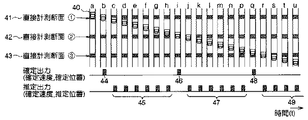
図6は本発明の速度計測部14から速度出力部15に出力する確定出力と推定出力のタイミングを模式化した図である。この図は上部に路面上を上から下に走行する車両40が直接計測断面41、42、43を通過する様子であり、横軸に時系列的に車両の位置が変化する様子をあらわしている。そして、その下に夫々の時系列に対応する路面a〜uの確定出力と推定出力のタイミング波形をあらわしている。図6を参照して動作について説明する。まず、車両40が直接計測断面41の手前の車両検出エリアで車両と検出され、路面a上を走行して直接計測断面41に到達すると、前記(1)式で速度と位置が計算され、路面bで確定出力44が速度出力部15に出力される。路面cでは確定出力44に基づいて前記(2)式で推定位置が計算され、路面c〜hの間一定間隔で推定出力45が速度出力部15に出力される。以下同様にして路面iで確定出力46が速度出力部15に出力され、路面jでは確定出力46に基づいて前記(2)式で推定位置が計算され、路面j〜pの間一定間隔で推定出力47が出力され、路面qで確定出力48が速度出力部15に出力され、路面rでは確定出力48に基づいて前記(2)式で推定位置が計算され、路面r〜以降図示しない間一定間隔で推定出力49が速度出力部15に出力される。
このように、速度出力部15に出力された信号により速度出力部15から信号機の制御回路にそのデータが送られる。そして、制御回路はそのデータから車両の速度を判断し、信号機を制御している。従って、速度出力部15からのデータ量が多いほど正確性は高くなる。また、一定間隔でしかも連続してくるデータに対しては処理が容易となり、制御回路の負荷を軽くすることができる。これにより、データの正確性が高くなると共に制御回路の負荷を軽くすることができる。
また、交差点の規模によっては撮像エリアが広すぎて1台の検知器ではカバーしきれない場合がある。そのような時は図6の撮像エリアを一つの単位として、複数の検知器を設置して夫々の検知器が受け持つ撮像エリアを決めて撮影する。そして、撮像エリア内の最後の直接計測断面43以降の直接計測断面は次の検知器が受け持つ。その場合、複数の検知器からの測定結果を1つのデータとして連続して出力するためには、最後の直接計測断面43にて速度を確定した後、車両が撮像エリアの視野外に出た場合(図6の路面u以降)、前記確定速度48に基づきそれ以降の推定を行い、次の検知器に継続するようにする。これにより、複数の検知器を使用した場合でも連続した測定データを出力することができる。
また、前述したように、速度出力部15の信号は信号機の制御回路にそのデータを送る。そして、制御回路はそのデータから車両の速度を判断し、信号機を制御している。従って、車両からのデータに即座に反応して信号機が制御されないと、車両と信号機とのマッチングが取れなくなる。つまり、システムとしてリアルタイム性が強く要求される。
【0021】
【発明の効果】
以上記載のごとく請求項1、9の発明によれば、前記車両検出手段により車両として検出された場合、該検出された位置から前記車両が前記計測断面を通過するまでに要した時間と距離から前記速度計測手段により前記車両速度を計測し、該計測結果を前記速度出力手段により出力すると共に、前記計測断面を通過後の車両位置は、前記速度出力手段からの出力結果に基づいて一定時間間隔毎に推定し、前記直接計測断面は前記撮像エリア内に少なくとも1つ以上設定され、前記各直接計測断面の手前には前記車両を検出する車両検出エリアと前記車両の速度を計測するために前記車両を追跡する車両追跡エリアが設けられ、前記直接計測断面から次の直接計測断面までの間は、該直接計測断面で確定された前記車両の位置と速度を元にして前記車両の位置と速度を推定し、該推定結果を一定時間間隔に前記位置・速度出力手段に出力することにより、複数の測定ポイントが設定可能となり、車両速度を精度良く測定することができ、車両検出精度が高くして以後のデータの信頼性を高め、しかも、装置のトータルコストを安くすることができる。また、画像処理の負荷を少なくして測定精度の低下を抑えることができる。
また請求項2は、前記直接計測断面からの計測結果と前記推定結果の出力は、一定時間間隔で連続して前記位置・速度出力手段に出力されるので、データの正確性が高くなると共に制御回路の負荷を軽くすることができる。
また請求項3は、前記車両の位置を推定する場合、前記直接計測断面から前記位置・速度出力手段への出力遅延時間を見込んで推定するようにすれば、遅延時間による速度と位置の誤差を最小限にすることができる。
【0022】
また請求項4は、前記直接計測断面の所定の範囲内で前記車両の計測結果及び前記推定結果が得られた場合、前記計測結果を前記直接計測断面における確定結果として前記位置・速度出力手段に出力することにより、直接計測断面ごとに推定値と計測値の誤差を補正することができる。
また請求項5は、前記直接計測断面の所定の範囲内で前記車両の計測結果が得られず、所定の時間経過後に前記車両が検出されない場合、以後の推定を打ち切ることにより、無駄な処理を実行することを防ぐことができる。
また請求項6は、画像式速度検知器が所定の距離に複数設置され、前記撮像エリア内の最後の直接計測断面にて前記車両の位置と速度を確定後、前記撮像エリアの視野外に車両が出た場合、前記最後の直接計測断面から得られた速度に基づいて前記視野外の車両の位置と速度を推定することにより、複数の検知器を使用した場合でも連続した測定データを出力することができる。
また請求項7は、前記直接計測断面から得られる前記計測結果及び推定結果を前記位置・速度出力手段に出力し、該出力が信号機の表示にリアルタイムに反映されるので、車両と信号機とのマッチングをとることができる。
また請求項8は、前記撮像エリア内に対向する車両が存在する場合、それぞれの車両に対して個別に前記直接計測断面間における前記車両の位置と速度を推定するため、コスト的に安いシステムを構築することができる。
【図面の簡単な説明】
【図1】本発明のジレンマ感応制御について説明するための一例の模式図である。
【図2】本発明の一実施形態に係る画像式速度検知システムの構成ブロック図である。
【図3】本発明の車両が直接計測断面手前の車両検出エリアと車両追跡エリアに進入した様子を表した模式図である。
【図4】本発明の位置の推定動作を説明するための模式図である。
【図5】本発明の直接計測断面での出力のマッチングについて説明するための図である。
【図6】本発明の速度計測部から速度出力部に出力する確定出力と推定出力のタイミングを模式化した図である。
【図7】本発明の車両検出部の動作フローチャートである。
【図8】本発明の車両追跡部の動作フローチャートである。
【図9】本発明の速度出力部の動作フローチャートである。
【図10】従来の車両の位置と速度の推定を説明するための図である。
【図11】従来の車両の位置と速度の直接計測を説明するための図である。
【符号の説明】
10 撮像部、11 A/D変換部、12 多値メモリ部、13 車両検出部、14 速度計測部、15 速度出力部
Claims (9)
- 撮像手段により撮影された路上を移動中の車両についての画像情報を処理して該車両の速度と位置を検出する画像式速度検知システムにおいて、
前記撮像手段により撮影された撮像エリア内の車両及び周辺の画像を格納する画像格納手段と、
該画像格納手段により格納された画像情報に基づいて画像認識により車両を検出する車両検出手段と、
前記車両の走行中の位置と速度を計測する位置・速度計測手段と、
前記車両の位置と速度を確定する直接計測断面と、該直接計測断面により確定した前記車両の位置と速度を信号装置に出力する位置・速度出力手段とを備え、
前記車両検出手段により車両として検出された場合、該検出された位置から前記車両が前記直接計測断面を通過するまでに要した時間と距離に基づいて前記位置・速度計測手段により前記車両の位置と速度を計測し、該計測結果を前記位置・速度出力手段により前記信号装置に出力すると共に、前記位置・速度出力手段からの出力結果を元にして、前記直接計測断面を通過後の車両の位置と速度を一定時間間隔毎に推定し、
前記直接計測断面は前記撮像エリア内に少なくとも1つ以上設定され、前記各直接計測断面の手前には前記車両を検出する車両検出エリアと前記車両の速度を計測するために前記車両を追跡する車両追跡エリアが設けられ、
前記直接計測断面から次の直接計測断面までの間は、前記直接計測断面で確定された前記車両の位置と速度を元にして、次の直接計測断面までの間の前記車両の位置と速度を推定し、該推定結果を一定時間間隔毎に前記位置・速度出力手段に出力することを特徴とする画像式速度検知システム。 - 前記直接計測断面からの計測結果及び前記推定結果の出力は、一定時間間隔で連続して前記位置・速度出力手段に出力されることを特徴とする請求項1に記載の画像式速度検知システム。
- 前記位置・速度出力手段が前記車両の位置を推定する場合、前記直接計測断面から前記位置・速度出力手段への出力遅延時間を見込んで推定することを特徴とする請求項1又は2に記載の画像式速度検知システム。
- 前記直接計測断面として認めた所定の範囲内で前記車両の計測結果及び推定結果が得られた場合、前記計測結果を前記直接計測断面における確定結果として前記位置・速度出力手段に出力することを特徴とする請求項2又は3に記載の画像式速度検知システム。
- 前記直接計測断面として認めた所定の範囲内で前記車両の計測結果が得られず、所定の時間経過後に前記車両が検出されない場合、以後の推定を打ち切ることを特徴とする請求項2又は3に記載の画像式速度検知システム。
- 複数の画像式速度検知器が所定の間隔で設置され、前記撮像エリア内の最後の直接計測断面にて前記車両の位置と速度を確定後、前記撮像エリアの視野外に車両が出た場合、前記最後の直接計測断面から得られた速度に基づいて前記視野外の車両の位置と速度を推定することを特徴とする請求項1乃至5の何れか一項に記載の画像式速度検知システム。
- 前記直接計測断面から得られる前記計測結果及び推定結果を前記位置・速度出力手段に出力し、該出力が信号機の表示にリアルタイムに反映されることを特徴とする請求項1乃至6の何れか一項に記載の画像式速度検知システム。
- 前記撮像エリア内に対向する車両が存在する場合、それぞれの車両に対して個別に前記直接計測断面間における前記車両の位置と速度を推定することを特徴とする請求項1に記載の画像式速度検知システム。
- 撮像手段により撮影された車両の画像情報を処理して該車両の速度と位置を検出する画像式速度検知方法において、前記撮像手段により撮影された撮像エリア内の車両及び周辺の画像情報を格納するステップと、格納された画像情報から画像認識により車両を検出するステップと、前記車両の位置と速度を計測するステップと、前記車両の位置と速度を確定する直接計測断面と、確定された前記車両の位置と速度を出力するステップとを備え、前記車両を検出するステップにより車両として検出された場合、該検出された位置から前記撮像エリア内を前記車両が前記直接計測断面を通過するまでに要した時間と距離から前記車両の位置と速度を計測すると共に、前記直接計測断面を通過後の車両の位置と速度は、前記計測結果を元にして一定時間間隔毎に推定し、
前記直接計測断面は前記撮像エリア内に少なくとも1つ以上設定され、前記各直接計測断面の手前には前記車両を検出する車両検出エリアと前記車両の速度を計測するために前記車両を追跡する車両追跡エリアが設けられ、
前記直接計測断面から次の直接計測断面までの間は、前記直接計測断面で確定された前記車両の位置と速度を元にして、次の直接計測断面までの間の前記車両の位置と速度を推定し、該推定結果を一定時間間隔毎に前記位置・速度出力手段に出力することを特徴とする画像式速度検知方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002012051A JP3875889B2 (ja) | 2002-01-21 | 2002-01-21 | 画像式速度検知システム及び画像式速度検知方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002012051A JP3875889B2 (ja) | 2002-01-21 | 2002-01-21 | 画像式速度検知システム及び画像式速度検知方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003217082A JP2003217082A (ja) | 2003-07-31 |
| JP3875889B2 true JP3875889B2 (ja) | 2007-01-31 |
Family
ID=27649373
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002012051A Expired - Fee Related JP3875889B2 (ja) | 2002-01-21 | 2002-01-21 | 画像式速度検知システム及び画像式速度検知方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3875889B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102592456A (zh) * | 2012-03-09 | 2012-07-18 | 泉州市视通光电网络有限公司 | 一种基于视频的车辆测速方法 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5003928B2 (ja) * | 2006-03-24 | 2012-08-22 | 住友電気工業株式会社 | 信号制御装置、システム及び方法 |
| JP5448602B2 (ja) * | 2009-06-25 | 2014-03-19 | 三菱電機株式会社 | 車両検知装置、交通情報提供システム、車両検知方法および車両検知プログラム |
| CN103150908B (zh) * | 2013-02-05 | 2015-05-27 | 长安大学 | 一种基于视频的平均车速检测方法 |
| US10682870B2 (en) * | 2016-06-09 | 2020-06-16 | Ricoh Company, Ltd. | Conveyed object detector, conveyance device, device including movable head, conveyed object detecting method, and non-transitory recording medium storing program of same |
| CN113030504B (zh) * | 2021-03-18 | 2023-03-07 | 北京航迹科技有限公司 | 车辆测速方法、装置、车载计算机设备和存储介质 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2835765B2 (ja) * | 1990-03-15 | 1998-12-14 | 本田技研工業株式会社 | 自動走行装置 |
| JPH0520594A (ja) * | 1991-07-15 | 1993-01-29 | Matsushita Electric Ind Co Ltd | 車両動態計測装置 |
| JP2944812B2 (ja) * | 1992-01-24 | 1999-09-06 | 松下電器産業株式会社 | Itvカメラ装置 |
| JPH07282387A (ja) * | 1994-04-12 | 1995-10-27 | Nippon Signal Co Ltd:The | 車両速度計測方法 |
| JP3360163B2 (ja) * | 1997-05-09 | 2002-12-24 | 株式会社日立製作所 | 交通流監視装置 |
| JP3912869B2 (ja) * | 1997-10-17 | 2007-05-09 | 三菱重工業株式会社 | 交通流計測装置 |
| JP2000048295A (ja) * | 1998-08-03 | 2000-02-18 | Mitsubishi Heavy Ind Ltd | 交通流監視システム |
| JP2001043483A (ja) * | 1999-07-29 | 2001-02-16 | Oki Electric Ind Co Ltd | 交通流計測システム |
| JP2001229488A (ja) * | 2000-02-15 | 2001-08-24 | Hitachi Ltd | 車両追跡方法および交通状況追跡装置 |
-
2002
- 2002-01-21 JP JP2002012051A patent/JP3875889B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102592456A (zh) * | 2012-03-09 | 2012-07-18 | 泉州市视通光电网络有限公司 | 一种基于视频的车辆测速方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003217082A (ja) | 2003-07-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4603970B2 (ja) | 道路区画線検出装置 | |
| JP4987573B2 (ja) | 車外監視装置 | |
| US8687896B2 (en) | Picture image processor, method for processing picture image and method for processing picture image | |
| JP4962581B2 (ja) | 区画線検出装置 | |
| US9665781B2 (en) | Moving body detection device and moving body detection method | |
| CN114084153B (zh) | 物体检测装置、物体检测方法以及物体检测用计算机程序 | |
| JP2000059764A (ja) | 車両の位置検出装置 | |
| US20090201370A1 (en) | Traveling Lane Detector | |
| JPH1139589A (ja) | 交通監視装置および交通監視方法 | |
| US20220398923A1 (en) | Traffic Signal Recognition Method and Traffic Signal Recognition Device | |
| JP4856525B2 (ja) | 先行車両離脱判定装置 | |
| JP3875889B2 (ja) | 画像式速度検知システム及び画像式速度検知方法 | |
| KR20170055738A (ko) | 영상 기반 주행 차로 판단 장치 및 방법 | |
| JP2536986B2 (ja) | 車間距離検出装置 | |
| JP2004086417A (ja) | 横断歩道等における歩行者検出方法及び同装置 | |
| JP2000306097A (ja) | 道路領域判定装置 | |
| JP2001014595A (ja) | 車両用走行レーン検知装置 | |
| JP4635245B2 (ja) | 交差点における停止車両の発進状態計測装置 | |
| JP2940296B2 (ja) | 駐車車両検出方法 | |
| JP3272694B2 (ja) | フェールセーフ機能を有する車外監視装置 | |
| JP2841640B2 (ja) | 交通流計測装置 | |
| JPH0991586A (ja) | 道路状態監視方法と装置 | |
| JP4074571B2 (ja) | 交通流計測装置 | |
| JP2004062564A (ja) | 信号無視車両取締装置 | |
| JP5192429B2 (ja) | 交通流計測装置および交通流計測方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040930 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060530 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060612 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060804 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20061017 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20061027 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 3875889 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091102 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101102 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111102 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121102 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131102 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |