JP3829436B2 - Fm−cwレーダ装置 - Google Patents
Fm−cwレーダ装置 Download PDFInfo
- Publication number
- JP3829436B2 JP3829436B2 JP27863997A JP27863997A JP3829436B2 JP 3829436 B2 JP3829436 B2 JP 3829436B2 JP 27863997 A JP27863997 A JP 27863997A JP 27863997 A JP27863997 A JP 27863997A JP 3829436 B2 JP3829436 B2 JP 3829436B2
- Authority
- JP
- Japan
- Prior art keywords
- target
- threshold value
- frequency
- noise
- gain
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images












Landscapes
- Radar Systems Or Details Thereof (AREA)
Description
【発明の属する技術分野】
この発明は雨、霧、雪等の悪天候時の視界が悪い場合や運転者の不注意により発生する乗用車、バス、トラック等の走行中の衝突事故を未然に防ぐために前方の車両や人、障害物等を検知して相対距離、相対速度を求め、運転者に危険を知らせ車両の安全走行に応用するFM−CWレーダ装置に関するものである。
【0002】
【従来の技術】
図12は従来より知られているFM−CWレーダ装置を概略的に示し、図13は従来のFM−CWレーダ装置の構成図である。
【0003】
図12の1はFM−CWレーダ装置を搭載した自車両、2は前方方向に走る前方の車両、3は対向車線を走る対向車両を示す。
【0004】
自車両1の前方付近に取り付けたFM−CWレーダ装置より送信された送信波は、例えば前方の車両2が存在する場合には反射され、FM−CWレーダ装置へ受信波(反射波)として戻ってくる。FM−CWレーダ装置は送信した電波と受信した電波の周波数差を求め、自車両1と前方の車両2の相対距離、相対速度を算出する。また、前方の車両2以外の対向車線の対向車両3や障害物(図示せず)についても送信波を指向させれは同様の検知が行える。
【0005】
図13の4は変調手段、5は発振器、6は方向性結合器、7は送信アンテナ、8は受信アンテナ、9はミキサ、10は増幅器、11はA/D(Analog to Digital)変換器、12は周波数分析手段、13は目標検出手段、14は距離速度算出手段、15は変調手段4と発振器5と方向性結合器6とミキサ9と増幅器10から構成される送受信機を示す。
【0006】
まず変調手段4は周波数変調(FM)信号を発生し、発振器5へ送る。発振器5はFM信号で変調された高周波信号を発生し、方向性結合器を介して送信アンテナ7とミキサ9に送る。送信アンテナ7は送られてきた高周波信号を前方の車両等の目標物に送信波として発射する。もし目標物が存在するなら時間遅れを生じた受信波(反射波)が受信アンテナ8によって受信され、ミキサ9へ送られる。ミキサ9は反射波と方向性結合器6によって分配された送信波の周波数差の信号(以後、ビート信号という。)を発生し、増幅器10へ送る。増幅器10はビート信号を増幅してA/D変換器11におくる。A/D変換器11はビート信号をアナログの信号形式からディジタルの信号形式に変換して周波数分析手段12へ送る。周波数分析手段12はディジタル化されたビート信号を取り込みFFT(高速フーリエ変換)等の処理により周波数分布を求める。目標検出手段13は周波数分布と閾値とを比較して、閾値を越えたものの中で極大となるものを目標物とする。距離速度算出手段14は目標検出手段13でピックアップされた周波数により目標物の相対距離及び相対速度を算出する。
【0007】
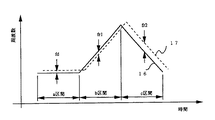
図14及び図15は目標物の相対距離及び相対速度の算出方法について説明する図であり、図14が周波数の変化、図15が周波数分布を示している。基本原理はS.A.Hovanessian氏の著書“Radar System Design & Analysis”(Artech House 出版)のP.78〜P.81に掲載されているものである。図14の16はFM−CWレーダ装置の送信周波数、17は受信周波数を示す。
【0008】
まず送信周波数16をa区間では一定、b区間では上昇、c区間では下降と変化させ、電波を送信する。図12の前方の車両2が相対速度v 相対距離Rで存在していた場合、光速C[m/s]、送信波長λ[m]、周波数の傾きK1[Hz/s]とすると、a区間のビート周波数fdは数1、b区間のビート周波数fr1は数2、c区間のビート周波数fr2は数3で示される。
【0009】
【数1】

【数2】
【数3】
よって周波数解析からfd,fr1,fr2を求め、数1、数2、数3を満たす相対速度V、相対距離Rの組合せを解くことにより目標の相対速度、相対距離を求めることができる。
【0013】
fd,fr1,fr2はa区間、b区間、c区間のビート信号をそれぞれFFT(高速フーリエ変換)等の周波数解析により求めることができる。図15は目標物が1つだけの場合のビート信号を周波数解析した場合を示す。(a)はa区間、(b)はb区間、(c)はc区間のFFT結果であり、それぞれのピーク周波数がfd,fr1,fr2に相当する。前方の車両等の電波を反射する目標物が2つ以上になった場合、周波数解析を行うと周波数軸上のスペクトル波形も合成され、複数のピーク周波数が存在するが、数1、数2、数3を満足する周波数の組合せを探すことによりそれぞれの目標物の相対速度、相対距離を求めることができる。
【0014】
【発明が解決しようとする課題】
従来のFM−CWレーダ装置はビート信号に目標物からの信号だけがある場合には周波数解析後、容易に閾値を決定でき、目標物の周波数を求めることができるが、実際には送受信機14の出力には熱雑音(受信機ノイズ)も増幅されて混入し、図16(a)で示すごとく周波数分布は複雑になる。閾値19のように閾値を高く設定しすぎると第1目標物20は検出できても第2目標物21は検出できない。また閾値22のように閾値を低く設定しすぎると受信機ノイズ23まで検出してしまう。また図16(b)と図(c)は注目する周波数と周辺の平均値を比較して周辺の平均値より上回っていたら目標物とする検出方法を示す図であり、24は周辺の平均値、25は平均値24に誤警報確率から決まる係数を乗じた閾値、26は平均値を選択する範囲を示す。図16(b)の閾値25は第2目標物21を注目した場合の閾値であり、第2目標物21の振幅は閾値25を越えているため、目標物として検出される。ところが、図16(c)のように第1目標物20が第2目標物21に隣接しているケースでは平均値が上昇してしまい、第2目標物21を検出できなくなってしまう。
【0015】
この発明に係わるFM−CWレーダ装置は上記のような問題を解決するためになされたもので、目標検出の閾値を容易に設定し、さらに目標物が複数個隣接していてもお互いの干渉を抑えてそれぞれ検出できるようにするものである。
【0016】
【課題を解決するための手段】
第1の発明のFM−CWレーダ装置は、上記ビート信号を増幅する増幅器の利得値に応じて、上記ビート信号の目標判定の閾値を決定する閾値算出手段と、上記ビート信号の出力波形と上記閾値を比較する比較手段とを備えたものである。
また、第2の発明のFM−CWレーダ装置は、上記ビート信号を増幅する増幅器の利得を制御する利得制御手段と、この利得に応じて上記FM−CWレーダ装置の送受信機が発生する周波数軸上のノイズ成分の平均値を予め記憶しておくノイズ平均値記憶手段と、上記利得に応じた上記ノイズ成分の平均値により上記ビート信号の目標判定の閾値を決定する閾値算出手段と、上記ビート信号の出力波形と上記閾値を比較する比較手段と、上記周波数分析結果の極大値を検出する極大値検出手段とを備えたものである。
【0017】
また、第3の発明のFM−CWレーダ装置は、第1または第2の発明において、予め送受信機の利得と受信機ノイズのスペクトルを測定しておき、利得に合わせて目標検出の閾値を設定するようにしたものである。
【0018】
また、第4の発明のFM−CWレーダ装置は、第1または第2の発明において、予め送受信機の利得と受信機ノイズの平均値の関係及び車体の傾斜と受信機ノイズのスペクトルの関係を測定しておき、利得と車体の傾斜状況に合わせて目標検出の閾値を設定するようにしたものである。
【0019】
また、第5の発明のFM−CWレーダ装置は、第1または第2の発明において、予め送受信機の利得と受信機ノイズの平均値の関係及び降雨と受信機ノイズのスペクトルの関係を測定しておき、利得と降雨の状態に合わせて目標検出の閾値を設定するようにしたものである。
【0020】
また、第6の発明のFM−CWレーダ装置は、第1または第2の発明において、予め送受信機の利得と受信機ノイズの平均値の関係及び送受信機の温度と受信機ノイズの関係を測定しておき、利得と送受信機の温度に合わせて目標検出の閾値を設定するようにしたものである。
【0021】
【発明の実施の形態】
実施の形態1.
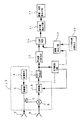
図1はこの発明の実施の形態1を示すFM−CWレーダ装置の構成図である。図において4、5、6、7、8、9、10、11、12、13、14、15は図13と同様のものである。27は利得制御手段、28はノイズ平均値記憶手段、29は閾値算出手段、30は比較手段、31は極大値検出手段である。
【0022】
A/D変換器11においてディジタルの信号形式に変換されたビート信号は周波数分析手段12と利得制御手段27に送られる。利得制御手段27はビート信号の大きさをみて、A/D変換器11が飽和しないレベルかあるいは入力が小さすぎないか確認し、ビート信号が最適なレベルになるように増幅器10の利得を調整する。また、利得制御手段27は増幅器10に設定した値に対応する引数を閾値算出手段29に送る。閾値算出手段29は利得制御手段27から渡された引数によりノイズ平均値記憶手段28から利得に応じた設定値(ノイズ成分の平均値)を取り込む。ノイズ成分の平均値とは予め目標物がない状況でビート信号を受信し、周波数分析した後、周波数軸方向に平均値を算出したものであり、送受信機15から発生するノイズ成分を評価した値である。図6は利得が変化したときのノイズ成分の周波数分布とその平均値の関係を示す図である。36a、36b、36c、36dはノイズ成分の周波数分布を示す。37a、37b、37c、37dはノイズ成分の平均値を示す。通常、ノイズ成分は利得が上がればそれに比例、或いは単調増加の関係で上昇する。図7は利得とノイズ成分の平均値の関係を示す図である。38はノイズ成分の変化を表す特性曲線であり、ノイズ平均値記憶手段28に記憶されているデータである。閾値算出手段29はノイズ平均値記憶手段28から利得に対応したノイズ平均値を取り込み、ノイズと目標物を区別する閾値を数4で求め、比較手段30に与える。数4は閾値a、係数k、ノイズ平均値bとし、係数kは誤検出が発生する確率が十分低くなるように設定する。
【0023】
【数4】
次に比較手段30は周波数分析手段12の出力が閾値aを越えていれば目標物であると判断する。図8は閾値a(閾値25)により受信機ノイズ23は選択されず、第1目標物20と第2目標物21のみが選択された例を示す。比較手段30で選択された目標物の振幅値は極大値検出手段31に送る。極大値検出手段31は振幅値が周波数軸上で連続していれは、その極大点を検出し、極大点の周波数の値を距離速度算出手段14に送る。距離速度算出手段14では従来と同様に目標物の相対速度、相対距離を求めることができる。
【0025】
実施の形態2.
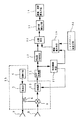
図2はこの発明の実施の形態2を示すFM−CWレーダ装置の構成図である。図において4、5、6、7、8、9、10、11、12、13、14、15は図13と同様のものである。27は利得制御手段、29は閾値算出手段、30は比較手段、31は極大値検出手段、32はノイズパターン記憶手段である。
【0026】
A/D変換器11においてディジタルの信号形式に変換されたビート信号は周波数分析手段12と利得制御手段27に送られる。利得制御手段27はビート信号の大きさをみて、A/D変換器11が飽和しないレベルかあるいは入力が小さすぎないか確認し、ビート信号が最適なレベルになるように増幅器10の利得を調整する。また、利得制御手段27は増幅器10に設定した値に対応する引数を閾値算出手段29に送る。閾値算出手段29は利得制御手段27から渡された引数によりノイズパターン記憶手段32から利得に応じたノイズパターンを取り込む。ノイズパターンとは予め目標物がない状況でビート信号を受信し、周波数分析したスペクトル即ちノイズスペクトルを複数回に渡り平均化処理したものである。図9(a)は利得が変化したときのノイズスペクトルと平均化処理を行ったノイズパターンの関係を示す図である。39a、39b、39cはノイズスペクトルを示す。40a、40b、40cはノイズパターンを示す。通常、ノイズ成分の振幅は利得にほぼ比例して上昇する。また、送受信機15のビート信号出力までの間の低域通過特性等により、図9(a)で示すように周波数が上がるほど振幅値が下がる傾向を示す。閾値算出手段29はノイズパターン記憶手段32から利得に対応したノイズパターンを取り込み、ノイズと目標物を区別する閾値を数5で求め、比較手段30に与える。数5は閾値a、係数k、送受信機の利得G、周波数軸上でn番目のノイズレベルN(n)とし、係数kは誤検出が発生する確率が十分低くなるように設定する。
【0027】
【数5】
比較手段30は周波数分析手段12の出力が閾値aを越えていれば目標物であると判断する。図9(b)は閾値a(閾値25)により受信機ノイズは選択されず、第1目標物20のみが選択された例を示す。比較手段30で選択された目標物の振幅値は極大値検出手段31に送る。極大値検出手段31は振幅値が周波数軸上で連続していれは、その極大点を検出し、極大点の周波数の値を距離速度算出手段11に送る。距離速度算出手段14では従来と同様に目標物の相対速度、相対距離を求めることができる。
【0029】
実施の形態3.
図3はこの発明の実施の形態3を示すFM−CWレーダ装置の構成図である。図において4、5、6、7、8、9、10、11、12、13、14、15は図13と同様のものである。27は利得制御手段、28はノイズ平均値記憶手段、29は閾値算出手段、30は比較手段、31は極大値検出手段、33は車体傾斜検出手段である。
【0030】
A/D変換器11においてディジタルの信号形式に変換されたビート信号は周波数分析手段12と利得制御手段27に送られる。利得制御手段27はビート信号の大きさをみて、A/D変換器11が飽和しないレベルかあるいは入力が小さすぎないか確認し、ビート信号が最適なレベルになるように増幅器10の利得を調整する。また、利得制御手段27は増幅器10に設定した値に対応する引数を閾値算出手段29に送る。閾値算出手段29は利得制御手段27から渡された引数によりノイズ平均値記憶手段28から利得に応じたノイズ平均値を取り込む。閾値算出手段29はまた、車体傾斜検出手段33から車体が水平方向よりどれだけ上下に傾いているか、角度を取り込む。車体傾斜検出手段33は車輪を支えるサスペンションの伸び縮みの検出等により、地面に対する車体の位置関係の変化から算出する。閾値算出手段29は上記ノイズ平均値と車体の傾斜角度から目標物を区別する閾値を求める。
【0031】
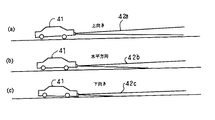
図10は車両と送信電波の関係を示す図である。41は本装置を搭載した車両41であり、42はアンテナの指向性を示す送受信ビームである。(a)は車両41が水平よりも上を向いている場合、(b)は車両41が地面に対して水平の場合で、(c)は車両41が水平よりも下を向いている場合である。電波は一般に地面からも反射してくるため、車両41が地面を向いているほど地面からの反射が大きい。図11は目標物がなく、送受信機15の利得が一定の状況で車両41のピッチ角を変えた場合のノイズ成分の周波数分布とその平均化処理を行ったノイズパターンの関係を示す図である。43a,43b,43cはノイズ成分の周波数分布を示す。44a,44b,44cはノイズパターンを示す。図10(a)のように送受信ビーム42aが上向きの場合はノイズ成分はノイズパターン44a、図10(b)のように送受信ビーム42bが水平の場合はノイズ成分はノイズパターン44b、図10(c)のように送受信ビーム42cが水平の場合はノイズ成分はノイズパターン44cとそれぞれ異なってくる。目標物を区別する閾値は例えば数6のような近似式で求め、比較手段30に与える。数6は閾値a、係数k、ノイズ平均値b、周波数f、傾きΔθ軸上でn番目のノイズレベルN(n)とし、係数kは誤検出が発生する確率が十分低くなるように設定する。
【0032】
【数6】
比較手段30は周波数分析手段12の出力が閾値aを越えていれば目標物であると判断する。図11(b)は第1目標物20の振幅が閾値a(閾値25)を越えて目標物として選択された例であり、振幅値は極大値検出手段31に送られる。極大値検出手段31は振幅値が周波数軸上で連続していれは、その極大点を検出し、極大点の周波数の値を距離速度算出手段14に送る。距離速度算出手段14では従来と同様に目標物の相対速度、相対距離を求めることができる。
【0034】
実施の形態4.
図4はこの発明の実施の形態4を示すFM−CWレーダ装置の構成図である。図において4、5、6、7、8、9、10、11、12、13、14、15は図13と同様のものである。27は利得制御手段、28はノイズ平均値記憶手段、29は閾値算出手段、30は比較手段、31は極大値検出手段、34は降雨検出手段である。
【0035】
A/D変換器11においてディジタルの信号形式に変換されたビート信号は周波数分析手段12と利得制御手段27に送られる。利得制御手段27はビート信号の大きさをみて、A/D変換器11が飽和しないレベルかあるいは入力が小さすぎないか確認し、ビート信号が最適なレベルになるように増幅器10の利得を調整する。また、利得制御手段27は増幅器10に設定した値に対応する引数を閾値算出手段29に送る。閾値算出手段29は利得制御手段27から渡された引数によりノイズ平均値記憶手段28から利得に応じたノイズ平均値を取り込む。閾値算出手段29はまた、降雨検出手段34から降雨情報を取り込む。降雨検出手段34は例えば車両のボンネットや雨水用の溝等に水分を検出するセンサーをつけることで情報を得る。閾値算出手段29は上記ノイズ平均値と降雨情報から目標物を区別する閾値を求め、比較手段30に送る、通常、降雨があると地面からの電波の反射が強くなるため、ノイズ成分の振幅が上昇した状態と同様の傾向を示す。従って予め降雨時のノイズ平均値と制限時のノイズ平均値を測定しておき、差を補正値として持つことにより閾値をより正確に算出することができる。比較手段30は周波数分析手段12の出力が閾値を越えていれば目標物であると判断し、振幅値を極大値検出手段31に送る。極大値検出手段31は振幅値が周波数軸上で連続していれば、その極大点を検出し、極大点の周波数の値を距離速度算出手段14に送る。距離速度算出手段14では従来と同様に目標物の相対速度、相対距離を求めることができる。
【0036】
実施の形態5.
図5はこの発明の実施の形態5を示すFM−CWレーダ装置の構成図である。図において4、5、6、7、8、9、10、11、12、13、14、15は図13と同様のものである。27は利得制御手段、28はノイズ平均値記憶手段、29は閾値算出手段、30は比較手段、31は極大値検出手段、35は温度検出手段である。
【0037】
A/D変換器11においてディジタルの信号形式に変換されたビート信号は周波数分析手段12と利得制御手段27に送られる。利得制御手段27はビート信号の大きさをみて、A/D変換器11が飽和しないレベルかあるいは入力が小さすぎないか確認し、ビート信号が最適なレベルになるように増幅器10の利得を調整する。また、利得制御手段27は増幅器10に設定した値に対応する引数を閾値算出手段29に送る。閾値算出手段29は利得制御手段27から渡された引数によりノイズ平均値記憶手段28から利得に応じたノイズ平均値を取り込む。閾値算出手段29はまた、温度検出手段35から送受信機15の温度情報を取り込む。温度検出手段35は例えば送受信機15にサーミスタ等の温度センサーをつけることで情報を得る。閾値算出手段29は上記ノイズ平均値と温度情報から目標物を区別する閾値を求め、比較手段30に送る、通常、送受信機15は温度によって送信出力や利得が変化しノイズ成分の振幅が変動する。従って予め利得制御手段27の出力を固定した状態で各温度のノイズ平均値を測定しておき、各温度間でのノイズ成分の差を補正値として持つことにより閾値をより正確に算出することができる。比較手段30は周波数分析手段12の出力が閾値を越えていれば目標物であると判断し、振幅値を極大値検出手段31に送る。極大値検出手段31は振幅値が周波数軸上で連続していれば、その極大点を検出し、極大点の周波数の値を距離速度算出手段14に送る。距離速度算出手段14では従来と同様に目標物の相対速度、相対距離を求めることができる。
【0038】
【発明の効果】
第1または第2の発明によれば、送受信機の利得とノイズ成分の振幅値の関係を予め測定しておき、目標検出の閾値を利得に連動させて設定することで閾値設定を容易にし、且つ複数の目標信号間の干渉を抑えて目標検出ができる効果がある。
【0039】
また、第3の発明によれば、利得に対するノイズ成分の周波数分布をパターンとして予め測定しておき、目標検出の閾値を利得に連動させて設定することで閾値設定を正確に行い、且つ複数の目標信号間の干渉を抑えて目標検出ができる効果がある。
【0040】
また、第4の発明によれば、アンテナの向きと地面からの電波の反射レベルの関係を予め測定しておき、目標検出の閾値を車両の向きと送受信機の利得に連動させて設定することで閾値設定を正確に行い、且つ複数の目標信号間の干渉を抑えて目標検出ができる効果がある。
【0041】
また、第5の発明によれば、降雨と地面からの電波の反射レベルの関係を予め測定しておき、降雨情報と送受信機の利得に連動させて設定することで閾値設定を正確に行い、且つ複数の目標信号間の干渉を抑えて目標検出ができる効果がある。
【0042】
また、第6の発明によれば、送受信機の温度とノイズ振幅値の関係を予め測定しておき、送受信機の温度と利得に連動させて設定することで閾値設定を正確に行い、且つ複数の目標信号間の干渉を抑えて目標検出ができる効果がある。
【図面の簡単な説明】
【図1】 この発明の実施の形態1を説明するための図である。
【図2】 この発明の実施の形態2を説明するための図である。
【図3】 この発明の実施の形態3を説明するための図である。
【図4】 この発明の実施の形態4を説明するための図である。
【図5】 この発明の実施の形態5を説明するための図である。
【図6】 この発明の実施の形態1を説明するための図である。
【図7】 この発明の実施の形態1を説明するための図である。
【図8】 この発明の実施の形態1を説明するための図である。
【図9】 この発明の実施の形態2を説明するための図である。
【図10】 この発明の実施の形態3を説明するための図である。
【図11】 この発明の実施の形態3を説明するための図である。
【図12】 FM−CWレーダ装置の概要を説明するための図である。
【図13】 従来のFM−CWレーダ装置の構成を説明するための図である。
【図14】 従来のFM−CWレーダ装置の原理を説明するための図である。
【図15】 従来のFM−CWレーダ装置の原理を説明するための図である。
【図16】 従来のFM−CWレーダ装置の課題を説明するための図である。
【符号の説明】
1 自車両、2 前方の車両、3 対向車両、4 変調手段、5 発振器、6方向性結合器、7 送信アンテナ、8 受信アンテナ、9 ミキサ、10 増幅器、11 A/D変換器、12 周波数分析手段、13 目標検出手段、14距離速度算出手段、15 送受信機、16 送信周波数、17 受信周波数、18a,18b,18c 目標物の周波数スペクトル、19 閾値、20 第1目標物、21 第2目標物、22 閾値、23 受信機ノイズ、24 ノイズ平均値、25 閾値、26 平均値計算の対象範囲、27 利得制御手段、28 ノイズ平均値記憶手段、29 閾値算出手段、30 比較手段、31 極大値検出手段、32 ノイズパターン記憶手段、33 車体傾斜検出手段、34 降雨検出手段、35 温度検出手段、36 ノイズ成分の周波数分布、37 ノイズ成分の平均値、38 利得に対するノイズ平均値、39 ノイズ成分の周波数分布、40 ノイズパターン、41 車両、42 送受信ビーム、43 ノイズ成分の周波数分布、44 ノイズパターン。
Claims (4)
- 車両に搭載し、車両前方にFM−CW波を送信して、前方の車両あるいは障害物からの反射波を受信し、送信波と受信波のビート信号に基いて前方の車両あるいは障害物までの距離、速度をもとめるFM−CWレーダ装置において、
上記ビート信号を増幅する増幅器の利得を制御する利得制御手段と、上記ビート信号の周波数分布を求める周波数分析手段と、目標物がない状況で受信した前記ビート信号について周波数分析したノイズスペクトルを、複数回に渡り各々の周波数ごとに平均化処理したノイズパターンを予め利得に応じて記憶しておくノイズパターン記憶手段と、上記利得に応じた上記ノイズパターンを取り込み、所定の係数に送受信機の利得を乗じ、その乗じた値に更に周波数軸上でのn(nは自然数)番目のノイズレベルを乗じて上記目標物がない状況で受信した前記ビート信号の目標判定の閾値を決定する閾値算出手段と、上記周波数分析手段により求められた周波数分布と上記閾値を比較する比較手段と、上記比較手段の出力に基づいて目標物の周波数分布の極大点を検出する極大値検出手段とを備えたことを特徴とするFM−CWレーダ装置。 - さらに、車両走行面に対する車体の傾斜角を検出する車体傾斜検出手段とを備え、上記閾値算出手段は、さらにこの傾斜角情報に応じた指数係数を乗じて目標判定の閾値を決定するものである請求項1に記載のFM−CWレーダ装置。
- さらに、降雨状態を検出する降雨検出手段とを備え、上記閾値算出手段は、少なくともこの降雨状態情報を用いて目標判定の閾値を決定するものである請求項1または2に記載のFM−CWレーダ装置。
- さらに、上記送受信機の温度を検出する温度検出手段とを備え、上記閾値算出手段は、少なくともこの検出される温度情報を用いて目標判定の閾値を決定するものである請求項1または2に記載のFM−CWレーダ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP27863997A JP3829436B2 (ja) | 1997-10-13 | 1997-10-13 | Fm−cwレーダ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP27863997A JP3829436B2 (ja) | 1997-10-13 | 1997-10-13 | Fm−cwレーダ装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005367589A Division JP3906869B2 (ja) | 2005-12-21 | 2005-12-21 | Fm−cwレーダ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH11118917A JPH11118917A (ja) | 1999-04-30 |
| JP3829436B2 true JP3829436B2 (ja) | 2006-10-04 |
Family
ID=17600089
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP27863997A Expired - Lifetime JP3829436B2 (ja) | 1997-10-13 | 1997-10-13 | Fm−cwレーダ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3829436B2 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100307550B1 (ko) * | 1999-09-13 | 2001-11-07 | 송재인 | 레이다시스템의수신이득조절장치 |
| EP1309883B1 (en) * | 2000-08-16 | 2007-01-31 | Raytheon Company | Video amplifier for a radar receiver |
| KR20020062001A (ko) * | 2001-01-19 | 2002-07-25 | 엘지이노텍 주식회사 | 재밍신호에 따른 주파수 채널 변환장치 및 그 방법 |
| JP3784327B2 (ja) * | 2002-01-18 | 2006-06-07 | 三菱電機株式会社 | 測角レーダ装置 |
| JP4828144B2 (ja) * | 2005-03-29 | 2011-11-30 | 三菱電機株式会社 | ミリ波レーダモジュール |
| JP5002904B2 (ja) * | 2005-04-04 | 2012-08-15 | ブラザー工業株式会社 | 無線タグ通信装置、その通信方法、及びその通信プログラム |
| US7439876B2 (en) * | 2005-08-02 | 2008-10-21 | General Electric Company | Microwave detection system and method |
| JP4001611B2 (ja) * | 2006-02-08 | 2007-10-31 | 三菱電機株式会社 | 測角レーダ装置 |
| JP4765915B2 (ja) * | 2006-12-01 | 2011-09-07 | 三菱電機株式会社 | Fm−cwレーダ装置 |
| JP2009174900A (ja) * | 2008-01-22 | 2009-08-06 | Fujitsu Ten Ltd | 物体検出装置、物体検出方法および物体検出システム |
| JP2009250616A (ja) * | 2008-04-01 | 2009-10-29 | Mitsubishi Electric Corp | レーダ信号処理装置 |
| JP5733881B2 (ja) * | 2009-01-20 | 2015-06-10 | 日本無線株式会社 | Fm−cwレーダ装置 |
| JP5835959B2 (ja) * | 2011-06-17 | 2015-12-24 | 日本信号株式会社 | 踏切障害物検知装置 |
| KR102168359B1 (ko) * | 2013-11-06 | 2020-10-21 | 현대모비스 주식회사 | 차량용 레이더 시스템 및 이의 수신 신호 이득 조절 방법 |
| JP6379709B2 (ja) * | 2014-06-18 | 2018-08-29 | 沖電気工業株式会社 | 信号処理装置、信号処理方法及びプログラム |
| JP6839549B2 (ja) * | 2017-01-27 | 2021-03-10 | 古河電気工業株式会社 | レーダ装置およびレーダ装置の制御方法 |
| US20210116537A1 (en) * | 2018-04-27 | 2021-04-22 | Mitsumi Electric Co., Ltd. | Proximity sensor |
-
1997
- 1997-10-13 JP JP27863997A patent/JP3829436B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JPH11118917A (ja) | 1999-04-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3829436B2 (ja) | Fm−cwレーダ装置 | |
| JP4765915B2 (ja) | Fm−cwレーダ装置 | |
| US6121916A (en) | Method and apparatus for recognizing stationary objects with a moving side-looking radar | |
| JP4678945B2 (ja) | スキャン式レーダの静止物検知方法 | |
| JP3562408B2 (ja) | レーダ装置特性検出装置及び記録媒体 | |
| US6429804B1 (en) | Motor-vehicle-mounted radar apparatus | |
| JP3371854B2 (ja) | 周囲状況検出装置及び記録媒体 | |
| JP4564611B2 (ja) | レーダ装置 | |
| EP1326087B1 (en) | Apparatus and method for radar data processing | |
| US7425917B2 (en) | Radar for detecting the velocity of a target | |
| JP3906869B2 (ja) | Fm−cwレーダ装置 | |
| US8896482B2 (en) | Object detection method | |
| WO2014108889A1 (en) | A method for mitigating rain clutter interference in millimeter-wave radar detection | |
| JP2003519386A (ja) | 対象の距離及び速度の測定方法 | |
| JP3635228B2 (ja) | スキャン式レーダの信号処理方法 | |
| JP3518363B2 (ja) | Fmcwレーダ装置及び記録媒体並びに車両制御装置 | |
| JPH10253750A (ja) | Fm−cwレーダ装置 | |
| JP2885528B2 (ja) | 警報距離制御装置 | |
| CN114207468A (zh) | 受阻雷达传感器的检测 | |
| JP3784327B2 (ja) | 測角レーダ装置 | |
| JP4001611B2 (ja) | 測角レーダ装置 | |
| JP2002062352A (ja) | 車載用レーダ装置 | |
| JP3496606B2 (ja) | レーダ装置 | |
| JPH06231398A (ja) | 画像情報を利用したfm−cwレーダシステム | |
| WO2024085038A1 (ja) | 電子機器、電子機器の制御方法、及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20040720 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050902 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20051025 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060322 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060519 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060620 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060703 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100721 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100721 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110721 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110721 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120721 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120721 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130721 Year of fee payment: 7 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |