JP3768735B2 - 顔画像処理装置 - Google Patents
顔画像処理装置 Download PDFInfo
- Publication number
- JP3768735B2 JP3768735B2 JP19295899A JP19295899A JP3768735B2 JP 3768735 B2 JP3768735 B2 JP 3768735B2 JP 19295899 A JP19295899 A JP 19295899A JP 19295899 A JP19295899 A JP 19295899A JP 3768735 B2 JP3768735 B2 JP 3768735B2
- Authority
- JP
- Japan
- Prior art keywords
- eye
- nostril
- candidates
- face image
- candidate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

























Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/16—Human faces, e.g. facial parts, sketches or expressions
- G06V40/168—Feature extraction; Face representation
- G06V40/171—Local features and components; Facial parts ; Occluding parts, e.g. glasses; Geometrical relationships
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/18—Eye characteristics, e.g. of the iris
- G06V40/19—Sensors therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/117—Identification of persons
- A61B5/1171—Identification of persons based on the shapes or appearances of their bodies or parts thereof
- A61B5/1176—Recognition of faces
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Ophthalmology & Optometry (AREA)
- Image Analysis (AREA)
- Traffic Control Systems (AREA)
- Auxiliary Drives, Propulsion Controls, And Safety Devices (AREA)
- Image Processing (AREA)
Description
【発明の属する技術分野】
この発明は、入力顔画像より2次元テンプレートを用いて、より正確に鼻孔および目の抽出を行う顔画像処理装置に関するものである。
【0002】
【従来の技術】
従来の運転者のテンプレートを用いた顔画像処理装置としては、例えば特開平8−175218号公報等に記載されているものがある。この従来例の装置全体の構成は、図24のブロック図に示されている。この従来の顔画像処理装置は、運転者を撮像するカメラ12と、A/D変換器、正規化回路及び相関演算回路を備えた画像処理装置13と、標準テンプレート及び眉毛や目などの顔要素配置データが予め格納されているメモリ16と、画像処理装置13の処理結果から運転者の運転状態を判別し、警報装置15に制御信号を出力して警報を発する電子制御ユニット(ECU)14からなる。
【0003】
また、この装置の動作すなわち処理のフローは図26に示されている。図26において、ステップS101により運転者の顔画像が撮像され、得られた顔画像は、ステップS102にて、最大輝度を256、最小輝度を1とする濃淡正規化が行われる。正規化処理が行われた後、ステップS103にて標準テンプレートを用いて対象テンプレートが検出される。すなわち、図25における、撮像された画像に対して、予め設定されている標準テンプレートを用いて相関演算を行い、テンプレート作成手段M2により運転者用の対象テンプレートを作成する。
【0004】
テンプレート作成手段M2は、撮像された画像内で運転者の対象顔領域を設定する対象顔領域設定手段M5と、その対象顔領域内で1つの目及び1つの眉を含む顔の縦方向に長い対象目近傍領域を設定する対象目近傍領域設定手段M6と、その対象目近傍領域内で目を含む対象目領域を設定する対象目領域設定手段を備えており、対象顔領域及び対象目近傍領域及び対象目領域それぞれを対象テンプレートとする。対象テンプレートが検出された後、再びカメラにより運転者の顔画像が撮影され、ステップS104にて濃淡正規化が行われる。そして、この正規化顔画像に対し、ステップS105にて対象テンプレートによる相関演算にて目領域の検出が行われる。S106において、ECU14は、順次入力される目領域の画像に基づいて運転者の目の状態を判定する。そしてステップS107で運転者の目状態に異常があると判定された場合には、運転者が居眠りしていると判定して、S108にて警報装置を作動させ、運転者に注意を促す。
【0005】
【発明が解決しようとする課題】
しかしながら、画像を多値データのままで処理を行うと非常に時間がかかり、また眼鏡装着の有無や天候・髪等の付属情報によって顔の状態(眉と目の関係等)は変化し、不安定である。ところが、上記した従来の顔画像処理装置では、眉と目を含む情報量の多いテンプレートを用いて相関演算を行っているため、入力画像総てを検索するには非常に時間がかかる上、個人情報を持たない標準テンプレートにより検索を開始するため、通常とは違った付属情報の影響下における画像では、鼻孔や目の検出が不可能となる恐れがある。
【0006】
この発明は、上記のような問題点を解決するためになされたもので、情報量は少ないが鼻孔および目の特徴を的確に表した2次元テンプレートを一つ或いは複数用いることにより、付属情報に左右されることなく精度よく、高速に鼻孔および目を抽出することができる顔画像処理装置を提供することを目的とするものである。
【0007】
【課題を解決するための手段】
この発明の一側面に係る顔画像処理装置は、顔画像を入力する顔画像入力手段と、入力した顔画像より目候補が存在する領域を推定する目領域設定手段と、目領域内で目候補を複数の輝度値を有するデータに変換する目候補抽出手段と、抽出された候補内で目およびその位置を確定する目確定手段とを備え、目候補抽出手段は、予め設定されている2次元テンプレートおよび少なくとも一つの閾値を用いて、注目画素と周辺画素との相対輝度に対する簡易マッチングを行うとともに、さらに2次元テンプレートおよび少なくとも一つの閾値によって抽出される鼻孔候補もしくは目候補の数が所定値以下の場合には、注目画素との相対輝度のマッチングを行う周辺画素の数を軽減していくものである。
【0008】
この発明の他の側面に係る顔画像処理装置は、顔画像を入力する顔画像入力手段と、入力した顔画像より鼻孔候補が存在する領域を推定する鼻孔領域設定手段と、鼻孔領域内で鼻孔候補を複数の輝度値を有するデータに変換する鼻孔候補抽出手段と、抽出された鼻孔候補内で鼻孔を確定する鼻孔確定手段と、確定した鼻孔より目候補が存在する領域を推定する目領域設定手段と、目領域内で目候補を複数の輝度値を有するデータに変換する目候補抽出手段と、目候補抽出手段により抽出された候補内で目候補およびその位置を確定する目確定手段とを備え、鼻孔候補抽出手段もしくは目候補抽出手段は、予め設定されている2次元テンプレートおよび少なくとも一つの閾値を用いて、注目画素と周辺画素との相対輝度に対する簡易マッチングを行うとともに、さらに2次元テンプレートおよび少なくとも一つの閾値によって抽出される鼻孔候補もしくは目候補の数が所定値以下の場合には、注目画素との相対輝度のマッチングを行う周辺画素の数を軽減していくものである。
【0010】
この発明の1つの実施態様においては、鼻孔候補抽出手段もしくは目候補抽出手段は、さらに可変抽出輝度閾値を用いて、マッチングを行う対象を限定することを特徴とするものである。
【0011】
この発明の他の実施態様においては、鼻孔候補抽出手段もしくは目候補抽出手段は、さらに可変抽出輝度閾値または2次元テンプレートを複数用いることを特徴とするものである。
【0012】
この発明の更に他の実施態様においては、鼻孔候補抽出手段もしくは目候補抽出手段は、さらに2次元テンプレートおよび少なくとも一つの閾値によって抽出される鼻孔候補もしくは目候補の数が所定値以下の場合には、注目画素との相対輝度のマッチングを行う周辺画素の数を軽減していくことを特徴とするものである。
【0013】
【発明の実施の形態】
以下、添付図面により本発明の実施の形態について詳細に説明する。
【0014】
実施の形態1.
図1はこの発明の実施の形態1に係る顔画像処理装置の第1の構成例を示す。第1の構成例における顔画像処理装置は、顔画像を撮影するCCDカメラ1とCCDカメラから出力された顔画像の画像データを記憶する画像メモリ2と、画像メモリ2から画像データを読み出して、その画像データに基づいて画像処理を行うCPU3とで構成される。
【0015】
図2は図1におけるCPU3内の処理の概要を示す機能ブロック図である。図2において、CPU3は、画像メモリ2から画像データを読み出して入力する顔画像入力手段4と、顔画像入力手段4に入力された画像データに基づいて目領域を設定する目領域設定手段5と、目領域設定手段5の出力に基づいて目候補を抽出する目候補抽出手段6と、目候補抽出手段6の出力に基づいて目とその存在位置を確定する目確定手段7とを備える。これらの手段は、CPU3がプログラムを実行してソフト的に処理する内容を機能的に表したものである。
【0016】
まず、CPU3は、画像メモリ2より顔画像の画像データを読み込んで顔画像入力手段4に入力し、目領域設定手段5により入力画像内で目が存在すると思われる領域を推定し、目候補抽出手段6により輝度変換を行って目候補を抽出する。この際、輝度変換をしたデータは入力画像とは別のメモリに保存し、入力画像データも後で参照できるようにしておく。さらに、抽出された領域から、目確定手段7により目候補および目位置を確定する。以下、各手段について詳細に説明する。
【0017】
図3はCCDカメラ1により撮影された顔画像8を示した図である。入力画像内で目候補が存在すると思われる領域を推定する目領域設定手段5では、例えば目検索モード中は図8に示すような顔全体をカバーする比較的大きな矩形の目検索領域5rを設定し、また目追跡モード中は目のみをカバーする比較的小さな矩形の目追跡領域5rl、5rrを設定する。目検索モードとは目位置学習が未だ行われていない(未だ目を見つけていない)状態を指し、目追跡モードとは目学習済の(目を見つけた)状態を指す。検索領域5rは画面内で通常の運転姿勢で顔が入る範囲に限定して設定される。追跡領域5rl、5rrは、目学習位置(又は目前回位置)5gl、5grから所定幅の領域を設定する。ここでは、両目に対し目領域を設定したが、左右どちらか一方でも構わない。
【0018】
次に、目候補抽出手段6について説明する。図4のフローチャートに示すように、ステップS1において、目候補抽出手段6は、予め用意した目形状を簡単かつ的確に表した2次元テンプレート6t(例えば図5の(a)参照)を用いて、目領域内で簡易マッチングを行い、目候補と思われる要素を抽出する(図5の(b))。目候補抽出手段6では、目領域設定手段5により設定した領域内で、注目画素6cをX、Y方向に順次移動させ、注目画素6cの周辺画素のうち目判定要素画素(=2次元テンプレートで指し示す点)の条件を確認し、注目画素6cが目候補画素であるかどうかの判定を行う。
【0019】
判定基準は、条件A(注目画素に対し、目判定要素画素総ての輝度値が所定閾値6th以上であること)である。
【0020】
図6に示した注目点(網掛け画素)の輝度値に対し、目判定要素画素(白画素)総ての輝度値が+6thを上回れば(図4でYES:実線)、注目点は目候補画素であると判定し(図6断面図)、ステップS2において、注目点の画素すなわち注目画素を輝度値1に設定し、また、ステップS1での判定結果が「NO」(図4で破線)(目判定要素画素総ての輝度値が+6th以下)であれば、ステップS3で注目画素を輝度値0に設定する。次いで、ステップS4において、全画素について検索済みか否かを判定し、「NO」であれば次の画素に移り、「YES」(実線)であれば処理を終了する(図6において、斜線画素=周辺画素、黒画素=目候補画素)。ここで目が抽出でき、眉が抽出されにくい理由は、図7に示すように、眉上部には髪、下部には目があり、また眉の形状から目形状の2次元テンプレートでは、眉は条件Aを総て満たすのが困難であるためである。
【0021】
次に、目確定手段7により上記で抽出した領域中の目候補および目位置を確定する。目候補抽出手段6によって抽出された領域に対し、図8の(b)に示すように、各X座標ごとにそのY軸上に存在する黒画素数を数えてその数値をX軸に投影し、所定幅7w・所定高さ7hを持つものを帯状領域として認め、さらにその帯状領域内の各Y座標ごとにそのX軸上に存在する黒画素数を数えてその数値をY軸に投影し、所定幅7w'・所定高さ7h'を持つものを目候補領域とする。目候補領域推定後にラベリングを行い、目候補を確定する。但し、通常のラベリングでは、図10の(b)に示すように、各画素につき8方のラベル確認と、全画素がラベル済みになるまでのループを要するため時間がかかる。そこで、図10の(a)に示すように、7方のラベル確認と1ループでの処理に限定し、ラベリングを簡単化して行う。図9にラベリングのフローチャートを示す。図9において、(a)は本発明のラベリング処理フロー、(b)は通常(従来)のラベリング処理フローである。
【0022】
次に、本発明によるラベリング処理について、図9(a)により説明する。
(1)2値化後の画像の所定領域に対し、例えば領域の左上部より注目画素を順次移動し、まず注目画素が黒色画素であるか判定する(ステップST1)。黒色画素であれば、ラベル済みであるかを判定し(ステップST2)、ラベル済みでなければ新しいラベル番号(NO.R)をふる(ステップST3)。
【0023】
(2)その後、ラベル開始位置(=現在位置)を記憶し(ステップST4)、図10(a)に示すように、ラベル開始位置より走査方向に順次走査する。すなわち、全画素検索済みか判定し(ステップST5)、NOであれば次の画素へ進み(ステップST6)、黒色画素か判定(ステップST7)する。走査中は注目画素の周辺7画素のラベル状態を判定する。注目画素が黒色画素であり(ステップST7でYES)、かつ周辺7画素にラベル済みのものが有れば(ステップST8でYES)、注目画素にラベル番号(NO.R)をふる(ステップST9)。(このとき新しいラベル番号(NO)になることはない。)それ以外はラベルをふらない。すなわち、周囲7画素中1画素がラベル済みであれば、その時点で注目画素にラベルをふり、次の画素へ進む。
【0024】
(3)検索領域終了まで行ったら(すなわち全画素検索済みになったら(ステップST5でYES))、ラベル開始位置へ戻り(ステップST10)、ラベル番号(NO.R)を更新(インクリメント)し(ステップST11)、全画素検索済みか判定し(ステップST12)、検索済みでなければ(NO)、次の画素へ進み(ステップST13)、ステップST1に戻って前記走査を繰り返す。
【0025】
(4)検索領域内すべての点に対し、(1)〜(3)の走査がすめば(ステップST12でYES)、処理を終了する(ステップST14)。
【0026】
これに対して、通常の(すなわち従来より知られている)動作は、図9(b)に示す通りである。すなわち、
(A)2値化後の画像の所定領域に対し、例えば領域の左上部より注目画素を順次移動し、まず注目画素が黒色画素であるかを判定する(ステップST21)。黒色画素であれば、ラベル済みであるかどうかを判定し(ステップST22)、ラベル済みでなければ新しいラベル番号(NO.R)をふる(ステップST23)。ステップST21で黒色画素でないか、或いはステップST22でラベル済みと判定されれば、全画素検索済みであるか(ステップST34)、および黒色画素が全てラベル済みであるかを判定し(ステップST35)、全画素検索済みでないか、或いは全画素がラベル済みでなければ次の画素へ進んで(ステップST37)、再びステップST21へ戻る。
【0027】
(B)ステップST23の後、図10(b)に示すように、注目画素の周囲8画素を確認し(ステップST24)、ラベル済みでなければ、次の周辺画素へ移り(ステップST25)、これが黒色画素であるかを判定し(ステップST26)、黒画素で有れば、注目画素と同じラベル番号(NO.R)を各周辺画素にふり、ラベル数RCTをカウントする(ステップST27)。
【0028】
(C)次いで(B)(ステップST24乃至27)を走査方向に順次行い、ステップST24で周囲8画素がラベル済みとなったら、全画素検索済みか判定し(ステップST28)、この判定結果がNOで有れば、次の画素へ進んで(ステップST29)、ラベル済みかを判定し(ステップST30)、ラベル済みで有ればステップST24へ進み、ラベル済みでなければステップST28へ進む。このようにして、ラベルすべきものがなくなるまで前記走査を繰り返す。
【0029】
(D)このようにして(C)まで終了すれば、すなわちステップST28で全画素検索済みになれば、領域開始位置へ戻り(ステップST31)、ラベル数RCTカウントが零であるかを判定し(ステップST32)、零でなければステップST30へ進み、零で有ればラベル番号(NO.R)を更新(インクリメント)し(ステップST33)、(A)〜(C)を繰り返す。
【0030】
(E)検索領域内すべての黒色画素に対し、(A)〜(D)の走査が済めば、すなわちステップST35で全黒色画素ラベル済みに達したら、処理を終了する(ステップST38)。
【0031】
さらに上記ラベリング処理においてラベル中にそのX・Y方向重心位置を演算し、目位置とする。但し、ラベルされた候補のX・Y方向幅や面積などから目とは判定できない場合には目未検出とし、もしくは要素が2つ以上ある場合などは要素のX・Y方向幅や面積などから最も目らしいもの1候補を抽出し、その重心を目位置とする。図11の(a)乃至(c)には、このような3つの例が示されている。(a)は目が1つの連続した領域で表される場合を示しており、目領域が「1」として連続的にラベリングされており、(b)は反射等で目が数個に分断された場合を示しており、この例では3つに分断された連続領域がそれぞれ「1」、「2」、「3」としてラベリングされており、また(c)は目が一部分分断された場合を示しており、2つに分離された領域がそれぞれ「1」、「2」で示されている。(b)及び(c)では、「2」とトラベルされた領域が目候補として抽出される。
【0032】
また、目確定手段7により確定した目位置はメモリ内に保存し、目追跡モード時の目領域設定に用いる。
【0033】
図12乃至16は本発明の実施の形態1に関連した第2の構成例を示すものである。第2の構成例は、図12に示すように、第1の構成例(図2参照)に、鼻孔領域設定手段9、鼻孔候補抽出手段10および鼻孔確定手段11を追加し、それと同時に目領域設定手段5を変更したものである。
【0034】
先ず、入力画像内で鼻孔候補が存在すると思われる領域を推定する鼻孔領域設定手段9について述べる。鼻孔領域設定手段9では、例えば鼻孔検索モード中には、図15に示すように、目から顎までを含む比較的大きな矩形の鼻孔検索領域9r、鼻孔追跡モード中には鼻のみを含む比較的小さな矩形の鼻孔追跡領域9rrをそれぞれ設定する。ここで、鼻孔検索モードとは、鼻孔位置学習が未(すなわち未だ鼻孔を目を見つけていない状態)を指し、鼻孔追跡モードとは、鼻孔学習済の状態を指す。鼻孔検索領域9rは画面内で通常の運転姿勢で顔が入る範囲に限定して設定する。また、鼻孔追跡領域9rrは、鼻孔学習位置(又は、鼻孔前回位置)9grから所定幅の領域を設定する。
【0035】
鼻孔候補抽出手段10は、例えば図13の(a)に示すような2次元テンプレート10tで鼻孔領域内で簡易マッチングを行い、図13の(b)に示すような鼻孔候補と思われる要素を抽出する。具体的には、鼻孔候補抽出手段10では、図14の(a)に示すように、鼻孔領域設定手段9により設定した領域内で、注目画素10cをX、Y方向に順次移動させ、注目画素10cの周辺画素のうち鼻孔判定要素画素(=2次元テンプレートで指し示す点)の条件を確認し、注目画素10cが鼻孔候補画素であるかどうかの判定を行う。判定基準は条件A(注目画素に対し、鼻孔判定要素画素総ての輝度値が所定閾値10th以上であること)である。図14の(a)の断面図である図14の(b)に示すように、注目点(網掛け画素)10cの輝度値に対し、鼻孔判定要素画素(白画素)総ての輝度値が+10thを上まわれば、注目点は鼻孔候補画素であると判定し、次の画素に移る。図14の(a)及び(b)において、斜線画素=周辺画素、黒画素=目候補画素である。
【0036】
次に、鼻孔確定手段11により上記のように抽出した領域中の鼻孔候補および鼻孔位置を確定する。鼻孔候補抽出手段10によって抽出された領域に対してラベリングを行い、鼻孔候補を確定する。ラベリングは上記第1の構成例と同様に行う。
【0037】
さらに、上記ラベリング処理におけるラベル付け中に抽出領域のX・Y方向重心位置を演算し、鼻孔候補位置とする。鼻孔候補は、図16に示すように、顔横方向に大きさと形状(楕円に近いもの)の近いものが2つ並ぶものを検索し、鼻孔とする。鼻孔位置は2つの候補の中点とする。ラベル付けされた要素のX・Y方向幅や面積などから鼻孔とは判定できない場合には鼻孔未検出とし、もしくは候補が2つ以上ある場合などは候補のX・Y方向幅や面積などから最も鼻孔らしいもの1候補を抽出し、その重心中点を鼻孔位置とする。
【0038】
鼻孔確定手段11により確定した鼻孔位置はメモリ内に保存し、鼻孔追跡モード時の鼻孔領域設定に用いる。
【0039】
図17および18は本発明の実施の形態1に関連した第3の構成例を示すものである。第3の構成例は、上記第1、第2の構成例の鼻孔候補抽出手段10および目候補抽出手段6において、可変抽出輝度閾値を用いるものである。
【0040】
具体的には、図17のフローチャートに示すように、図1のステップS1と同様のテンプレートの条件を判定するステップS1の前に、ステップS6で、上記第1、第2の構成例の鼻孔候補抽出手段10および目候補抽出手段6において、注目画素の輝度値を可変抽出輝度閾値(鼻孔と目はそれぞれ違う閾値)により評価し、2次元テンプレートによる評価を行うか否かを判定する。判定基準は、図18に示すように、条件B(注目画素の輝度値が、可変抽出輝度閾値610th以下であること)である。ここで、注目点画素を減少させることにより、処理速度がより早くなる。また可変抽出輝度閾値610thは、前画面までの2次元テンプレート通過画素の輝度値により可変に制御することで、固定値にした場合よりさらに画像に適した値を得ることが可能である。
【0041】
可変抽出輝度閾値は、例えば、推定閾値を設定し、目(或いは鼻孔)を検索後、抽出可であれば閾値が適当であるとして、その閾値を継続して用いる。抽出不可であれば推定閾値は不適当すなわち目(或いは鼻孔)画素が範囲外として閾値を段階的に緩めていく。また、抽出可の際の閾値は前述のように継続しても良いが、2次元テンプレート通過画素の平均輝度値または最大輝度値などを利用して再設定すると、より適当な閾値が得られる。
【0042】
図19および20は本発明の実施の形態1に関連した第4の構成例を示すものである。第4の構成例は、上記第1、第2、第3の構成例の鼻孔候補抽出手段10および目候補抽出手段6において、2次元テンプレートを複数用いるものである。
【0043】
上記第1、第2、第3の構成例では、鼻孔候補抽出手段10および目候補抽出手段6において2次元テンプレート6t、9tを使用したが、図19に示すように、ステップS1で、最初の2次元テンプレート6t、9tが条件Aを満たさない場合には、ステップS7において、次の2次元テンプレート6t'、9t'がその条件Aを満たしているか否かを判定し、満たせば通過画素とするものである。
【0044】
また、複数テンプレートには色々考えられるが、例えば図20(A)では、注目画素とテンプレート画素の距離が変わるだけであるが、(3)及び(4)に示すように、左側のテンプレートだけでは眼鏡フレームなどの位置によっては、注目点と目下側テンプレートの距離が長いために通過不可((3)参照)である可能性があり、また(1)及び(2)に示すように、右側のテンプレートだけでは眉と目の間隔が狭い人では通過不可((2)参照)になる可能性がある。
【0045】
すなわち、図20(B)のように、テンプレートと注目点との距離やテンプレートの大きさの大小で個人差をカバーすることが可能である。ここでは、テンプレートと注目点との距離の異なる2つ目のテンプレート(1)、(2)及び大きさの異なる2つの鼻孔のテンプレート(3)、(4)を示しているが、これらはどちらにも言えることで、目のテンプレートを大小2種類にすることでの個人差をカバーしたり、鼻孔のテンプレートを大きさは同じで注目点とテンプレートとの距離を変えることで髭などがあっても鼻孔を検出できるようにすることも考えられる。システムの処理速度にもよるが、テンプレートは2種に限らず、数種あればそれだけ対応できるものが多くなる。
【0046】
図21および22は本発明の実施の形態1に関連した第5の構成例を示すものである。第5の構成例は、上記第1乃至4の構成例の鼻孔候補抽出手段10および目候補抽出手段6において、可変抽出輝度閾値を複数用いるものである。
【0047】
第5の構成例では、上記第1乃至4の構成例の鼻孔候補抽出手段10および目候補抽出手段6において、注目画素の輝度値を評価するための可変抽出輝度閾値を複数持つことにより、注目画素の輝度範囲限定による速度アップまたは入力画像の輝度変化への対応を行うものである。例えば、2つの可変抽出輝度閾値610th、610th'(610th'>610th)を持つ場合には、入力画像の輝度変化により第1の可変抽出輝度閾値610thによる条件Bを満たす画素が無い或いは少なかった場合、第1の可変抽出輝度閾値610thよりも小さな第2の可変抽出輝度閾値610th'を用いて再度評価して輝度を3値化した画像を得る。すなわち、図21のフローチャートに示すように、ステップS6の判定結果が「NO」のとき、ステップS8で注目画素が第2の可変抽出輝度閾値610th'以下であるか否かを判定して、判定結果が「YES」であれば、ステップS7で追加のテンプレートが条件Aをクリアしているか否か判定して、この判定結果が「YES」であれば、ステップS9で注目画素をテンプレート通過画素として、輝度値2を設定する。また、ステップS8或いはステップS7において、判定結果が「NO」であれば、ステップS3で注目画素の輝度値を「0」とする。
【0048】
図22に示すように、眼鏡反射などで目画像の輝度値が上がっている場合には、第1の可変抽出輝度閾値610thのみを用いた場合では目の形状が崩れていて目と認識できなかったものが(図22の左側)、第2の可変抽出輝度閾値610th'を用いることにより、目として認識できることがある(図22の右側)。第2の可変抽出輝度閾値610th'は第3の構成例の可変抽出輝度閾値610thと同様、前画面までの2次元テンプレート通過画素の輝度値により制御することも可能であるし、第1の可変抽出輝度閾値610thの値によって制御することも可能である。
【0049】
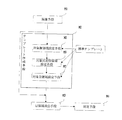
図23は本発明の実施の形態1の特徴部を示すものである。本発明の実施の形態1は、上記第1乃至5の構成例の鼻孔候補抽出手段10或いは目候補抽出手段6或いはそれら両方の手段において、2次元テンプレートを画像抽出度合いにより緩和していくものである。
すなわち、2次元テンプレートおよび少なくとも一つの閾値によって抽出される鼻孔候補もしくは目候補の数が所定値以下の場合には、注目画素との相対輝度のマッチングを行う周辺画素の数を軽減していくことにより、付属情報の変化(眼鏡反射や髪等)に対応して、さらに精度よく顔要素を抽出することを可能にする。
【0050】
上記第1乃至5の構成例の鼻孔候補抽出手段10或いは目候補抽出手段6或いはそれら両手段において、条件Aを満たすことが困難な状況において、2次元テンプレートを緩和することで対応する。2次元テンプレート6t、9tを用いて抽出を行った際の通過画素が無い或いは少ない場合、条件Aにおいて、テンプレート非通過画素を0点−>1点−>2点...と順次ループごとに緩和(2次元テンプレートの構成画素(=周辺画素)の数を軽減)していく(上限は設定する)ことにより、鼻孔候補或いは目候補或いはそれら両者を抽出する。
【0051】
具体的には、図23のフローチャートに示すように、まず最初に、ステップS10において、注目画素が輝度変換済みか否かを判定し、判定結果が「YES」であれば、ステップS6へ進み、以下ステップS4までの処理は図4のフローチャートの処理と同じである。ステップS10の判定結果が「NO」であれば、ステップS4へ進み、そこで全画素について検索済みか否かを判定し、「NO」であれば、ステップS5で処理対象を次の注目画素に移してステップS10に戻る。
【0052】
ステップS4の判定結果が「YES」であれば、ステップS11で通過が素が不十分でないか否かを判定し、「YES」であれば、ステップS12で条件Aの緩和数(回数)が所定の上限値を超えていないか否かを判定し、この判定結果が「YES」であれば(超えていなければ)、緩和数を更新して(例えば1だけ増加させて)から開始位置であるステップS10へ戻る。また、ステップS11或いはステップS12において判定結果が「NO」の場合には、処理を終了する。
【0053】
【発明の効果】
以上から明らかなように、この発明の一側面に係る顔画像処理装置は、顔画像を入力する顔画像入力手段と、入力した顔画像より目候補が存在する領域を推定する目領域設定手段と、目領域内で目候補を複数の輝度値を有するデータに変換する目候補抽出手段と、抽出された候補内で目およびその位置を確定する目確定手段とを備え、目候補抽出手段は、予め設定されている2次元テンプレートおよび少なくとも一つの閾値を用いて、注目画素と周辺画素との相対輝度に対する簡易マッチングを行うとともに、さらに2次元テンプレートおよび少なくとも一つの閾値によって抽出される鼻孔候補もしくは目候補の数が所定値以下の場合には、注目画素との相対輝度のマッチングを行う周辺画素の数を軽減していくようにしたので、2次元テンプレートを用いて直接目領域の輝度変換を行うことによって、鼻孔やその他の補助的な要素を利用することなく、高速に目領域を抽出することができ、また、2次元テンプレートを用いることにより、一般的なテンプレートマッチングにおける相関演算を用いないため、精度良く、高速に顔要素を抽出することができるうえ、付属情報の変化(眼鏡反射や髪等)に対応して、さらに精度よく顔要素を抽出することができる。
【0054】
また、この発明の他の側面に係る顔画像処理装置は、顔画像を入力する顔画像入力手段と、入力した顔画像より鼻孔候補が存在する領域を推定する鼻孔領域設定手段と、鼻孔領域内で鼻孔候補を複数の輝度値を有するデータに変換する鼻孔候補抽出手段と、抽出された鼻孔候補内で鼻孔を確定する鼻孔確定手段と、確定した鼻孔より目候補が存在する領域を推定する目領域設定手段と、目領域内で目候補を複数の輝度値を有するデータに変換する目候補抽出手段と、目候補抽出手段により抽出された候補内で目候補およびその位置を確定する目確定手段とを備え、鼻孔候補抽出手段もしくは目候補抽出手段は、予め設定されている2次元テンプレートおよび少なくとも一つの閾値を用いて、注目画素と周辺画素との相対輝度に対する簡易マッチングを行うとともに、さらに2次元テンプレートおよび少なくとも一つの閾値によって抽出される鼻孔候補もしくは目候補の数が所定値以下の場合には、注目画素との相対輝度のマッチングを行う周辺画素の数を軽減していくようにしたので、2次元テンプレートを用いて鼻孔抽出を行い、抽出された鼻孔を用いて目存在領域の推定を行うことにより精度良く、目領域を抽出することができ、また、2次元テンプレートを用いることにより、一般的なテンプレートマッチングにおける相関演算を用いないため、精度良く、高速に顔要素を抽出することができるうえ、付属情報の変化(眼鏡反射や髪等)に対応して、さらに精度よく顔要素を抽出することができる。
【0056】
この発明の1つの実施態様においては、鼻孔候補抽出手段もしくは目候補抽出手段は、さらに可変抽出輝度閾値を用いて、マッチングを行う対象を限定するので、可変抽出輝度閾値を併用することにより2次元テンプレートを用いる領域を限定して、さらに高速に顔要素を抽出することができる。
【0057】
この発明の他の実施態様においては、鼻孔候補抽出手段もしくは目候補抽出手段は、さらに可変抽出輝度閾値または2次元テンプレートを複数用いるので、2次元テンプレートおよび可変抽出輝度閾値を複数併用することにより、個人差による顔要素の違いをカバーして、さらに精度良く顔要素を抽出することができる。
【図面の簡単な説明】
【図1】 本発明の実施の形態1に係る顔画像処理装置の第1の構成例を示す図である。
【図2】 図1の顔画像処理装置の機能的構成を示すフローチャートである。
【図3】 本発明におけるカメラからの入力画像を示す図である。
【図4】 本発明の実施の形態1に関連した第1、第2の構成例における目抽出手段又は鼻孔抽出手段の処理の流れを示すブロック図である。
【図5】 本発明における目抽出手段のテンプレートである。
【図6】 その目抽出手段の説明図である。
【図7】 その目抽出手段による、眉選択時の様子を示す図である。
【図8】 本発明における目領域設定手段の説明図である。
【図9】 本発明の目確定手段のラベリング処理の流れを示すフローチャートである。
【図10】 本発明及び従来のラベリング時の走査方向を表す説明図である。
【図11】 3例のラベリングの状態を表す説明図である。
【図12】 本発明の実施の形態1に関連した顔画像処理装置の第2の構成例の機能的構成を示すブロック図である。
【図13】 本発明の鼻孔抽出手段のテンプレートである。
【図14】 その鼻孔抽出手段の説明図である。
【図15】 その鼻孔領域設定手段の説明図である。
【図16】 その鼻孔確定手段のラベリングの説明図である。
【図17】 本発明の実施の形態1に関連した第3の構成例における目抽出手段、鼻孔抽出手段の処理の流れを示すフローチャートである。
【図18】 本発明の実施の形態1に関連した第3の構成例における目抽出手段又は鼻孔抽出手段の説明図である。
【図19】 本発明の実施の形態1に関連した第4の構成例における目抽出手段又は鼻孔抽出手段の処理の流れを示すフローチャートである。
【図20】 本発明の実施の形態1に関連した第4の構成例における目抽出手段又は鼻孔抽出手段のテンプレートである。
【図21】 本発明の実施の形態1に関連した第5の構成例における目抽出手段又は鼻孔抽出手段の処理の流れを示すフローチャートである。
【図22】 本発明の実施の形態1に関連した第5の構成例における目抽出手段又は鼻孔抽出手段の説明図である。
【図23】 本発明の実施の形態1における目抽出手段又は鼻孔抽出手段の処理の流れを示すフローチャートである。
【図24】 従来例の顔画像処理装置の全体構成を示す図である。
【図25】 従来例の顔画像処理装置のテンプレート作成手段の詳細を示す図である。
【図26】 従来例の顔画像処理装置の動作の流れを示すフローチャートである。
【符号の説明】
1 カメラ、2 画像メモリ、3 CPU、4 顔画像入力手段、5 目領域設定手段、6 目候補抽出手段、7 目確定手段、9 鼻孔領域設定手段、10 鼻孔候補抽出手段、11 鼻孔確定手段。
Claims (4)
- 顔画像を入力する顔画像入力手段と、
入力した顔画像より目候補が存在する領域を推定する目領域設定手段と、
前記目領域内で目候補を複数の輝度値を有するデータに変換する目候補抽出手段と、
抽出された候補内で目およびその位置を確定する目確定手段と、
を備え、
前記目候補抽出手段は、予め設定されている2次元テンプレートおよび少なくとも一つの閾値を用いて、注目画素と周辺画素との相対輝度に対する簡易マッチングを行うとともに、さらに2次元テンプレートおよび少なくとも一つの閾値によって抽出される鼻孔候補もしくは目候補の数が所定値以下の場合には、前記注目画素との相対輝度のマッチングを行う前記周辺画素の数を軽減していくことを特徴とする顔画像処理装置。 - 顔画像を入力する顔画像入力手段と、
入力した顔画像より鼻孔候補が存在する領域を推定する鼻孔領域設定手段と、
前記鼻孔領域内で鼻孔候補を複数の輝度値を有するデータに変換する鼻孔候補抽出手段と、
抽出された鼻孔候補内で鼻孔を確定する鼻孔確定手段と、
確定した鼻孔より目候補が存在する領域を推定する目領域設定手段と、
目領域内で目候補を複数の輝度値を有するデータに変換する目候補抽出手段と、
前記目候補抽出手段により抽出された候補内で目候補およびその位置を確定する目確定手段と、
を備え、
前記鼻孔候補抽出手段もしくは前記目候補抽出手段は、予め設定されている2次元テンプレートおよび少なくとも一つの閾値を用いて、注目画素と周辺画素との相対輝度に対する簡易マッチングを行うとともに、さらに2次元テンプレートおよび少なくとも一つの閾値によって抽出される鼻孔候補もしくは目候補の数が所定値以下の場合には、前記注目画素との相対輝度のマッチングを行う前記周辺画素の数を軽減していくことを特徴とする顔画像処理装置。 - 前記鼻孔候補抽出手段もしくは前記目候補抽出手段は、さらに可変抽出輝度閾値を用いて、マッチングを行う対象を限定することを特徴とする請求項1又は請求項2に記載の顔画像処理装置。
- 前記鼻孔候補抽出手段もしくは前記目候補抽出手段は、さらに可変抽出輝度閾値または2次元テンプレートを複数用いることを特徴とする請求項1から請求項3までのいずれか1項に記載の顔画像処理装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP19295899A JP3768735B2 (ja) | 1999-07-07 | 1999-07-07 | 顔画像処理装置 |
| US09/449,610 US6094498A (en) | 1999-07-07 | 1999-11-30 | Face image processing apparatus employing two-dimensional template |
| KR10-2000-0004191A KR100377531B1 (ko) | 1999-07-07 | 2000-01-28 | 2차원 템플레이트를 사용한 안화상처리장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP19295899A JP3768735B2 (ja) | 1999-07-07 | 1999-07-07 | 顔画像処理装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001022933A JP2001022933A (ja) | 2001-01-26 |
| JP3768735B2 true JP3768735B2 (ja) | 2006-04-19 |
Family
ID=16299872
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP19295899A Expired - Fee Related JP3768735B2 (ja) | 1999-07-07 | 1999-07-07 | 顔画像処理装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US6094498A (ja) |
| JP (1) | JP3768735B2 (ja) |
| KR (1) | KR100377531B1 (ja) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AUPQ896000A0 (en) * | 2000-07-24 | 2000-08-17 | Seeing Machines Pty Ltd | Facial image processing system |
| EP1229486A1 (en) * | 2001-01-31 | 2002-08-07 | GRETAG IMAGING Trading AG | Automatic image pattern detection |
| US7239726B2 (en) * | 2001-12-12 | 2007-07-03 | Sony Corporation | System and method for effectively extracting facial feature information |
| US6873714B2 (en) * | 2002-02-19 | 2005-03-29 | Delphi Technologies, Inc. | Auto calibration and personalization of eye tracking system using larger field of view imager with higher resolution |
| KR20030081539A (ko) * | 2002-04-11 | 2003-10-22 | (주)엠앤제이코퍼레이션 | 얼굴 구성 요소 추출 시스템 및 방법 |
| CN100465985C (zh) * | 2002-12-31 | 2009-03-04 | 佳能株式会社 | 人眼探测方法及设备 |
| US7421097B2 (en) * | 2003-05-27 | 2008-09-02 | Honeywell International Inc. | Face identification verification using 3 dimensional modeling |
| WO2006030519A1 (ja) * | 2004-09-17 | 2006-03-23 | Mitsubishi Denki Kabushiki Kaisha | 顔認証装置及び顔認証方法 |
| US7444017B2 (en) * | 2004-11-10 | 2008-10-28 | Eastman Kodak Company | Detecting irises and pupils in images of humans |
| KR100590572B1 (ko) | 2004-12-15 | 2006-06-19 | 삼성전자주식회사 | 눈 위치 검출 방법 및 장치 |
| JP4397414B2 (ja) * | 2005-02-17 | 2010-01-13 | 富士通株式会社 | 画像処理方法、画像処理システム、画像処理装置及びコンピュータプログラム |
| JP4628839B2 (ja) * | 2005-03-29 | 2011-02-09 | 株式会社足立ライト工業所 | 顔画像認識装置 |
| JP4692447B2 (ja) * | 2006-09-08 | 2011-06-01 | トヨタ自動車株式会社 | 居眠り検知装置、居眠り検知方法 |
| KR100903096B1 (ko) | 2007-06-27 | 2009-06-16 | 포항공과대학교 산학협력단 | 눈 검증 및 눈 위치 보정을 이용한 눈 검출 방법 |
| JP4663699B2 (ja) * | 2007-09-27 | 2011-04-06 | 富士フイルム株式会社 | 画像表示装置、及び画像表示方法 |
| US9662977B2 (en) * | 2008-01-02 | 2017-05-30 | Hi Tech Robotic Systemz Ltd. | Driver state monitoring system |
| US8189879B2 (en) * | 2008-02-14 | 2012-05-29 | Iristrac, Llc | System and method for animal identification using IRIS images |
| JP5336939B2 (ja) * | 2009-06-15 | 2013-11-06 | キヤノン株式会社 | 画像処理装置、画像処理方法、及びプログラム |
| CN101853397A (zh) * | 2010-04-21 | 2010-10-06 | 中国科学院半导体研究所 | 一种基于人类视觉特性的仿生人脸检测方法 |
| JP5367037B2 (ja) * | 2011-09-26 | 2013-12-11 | 本田技研工業株式会社 | 顔向き検出装置 |
| KR20130054636A (ko) * | 2011-11-17 | 2013-05-27 | 현대모비스 주식회사 | 적외선 카메라 및 3d 모델링을 이용한 운전자 자세 감시 장치 및 방법 |
| JP5418579B2 (ja) * | 2011-12-06 | 2014-02-19 | 株式会社デンソー | 開閉眼検出装置 |
| US9265458B2 (en) | 2012-12-04 | 2016-02-23 | Sync-Think, Inc. | Application of smooth pursuit cognitive testing paradigms to clinical drug development |
| US9380976B2 (en) | 2013-03-11 | 2016-07-05 | Sync-Think, Inc. | Optical neuroinformatics |
| JP6256165B2 (ja) | 2014-04-09 | 2018-01-10 | 富士通株式会社 | 視線検出装置、視線検出プログラム及び視線検出方法 |
| CN105279764B (zh) | 2014-05-27 | 2020-09-11 | 北京三星通信技术研究有限公司 | 眼睛图像处理设备和方法 |
| KR20160073866A (ko) * | 2014-12-17 | 2016-06-27 | 삼성전자주식회사 | 홍채 인식 장치, 이를 포함하는 홍채 인식 시스템 및 상기 홍채 인식 시스템의 동작 방법 |
| JP6651911B2 (ja) | 2016-03-07 | 2020-02-19 | オムロン株式会社 | 顔画像処理装置 |
| EP4016489A1 (en) * | 2017-02-27 | 2022-06-22 | Tobii AB | Determining eye openness with an eye tracking device |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01158579A (ja) * | 1987-09-09 | 1989-06-21 | Aisin Seiki Co Ltd | 像認識装置 |
| JPH08175218A (ja) * | 1994-12-26 | 1996-07-09 | Toyota Motor Corp | 運転状態検出装置 |
| JP3452685B2 (ja) * | 1995-05-10 | 2003-09-29 | 三菱電機株式会社 | 顔画像の処理装置 |
| JP3316725B2 (ja) * | 1995-07-06 | 2002-08-19 | 三菱電機株式会社 | 顔画像撮像装置 |
-
1999
- 1999-07-07 JP JP19295899A patent/JP3768735B2/ja not_active Expired - Fee Related
- 1999-11-30 US US09/449,610 patent/US6094498A/en not_active Expired - Lifetime
-
2000
- 2000-01-28 KR KR10-2000-0004191A patent/KR100377531B1/ko not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001022933A (ja) | 2001-01-26 |
| KR20010014458A (ko) | 2001-02-26 |
| US6094498A (en) | 2000-07-25 |
| KR100377531B1 (ko) | 2003-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3768735B2 (ja) | 顔画像処理装置 | |
| EP1426898B1 (en) | Human detection through face detection and motion detection | |
| US7912253B2 (en) | Object recognition method and apparatus therefor | |
| JP5629803B2 (ja) | 画像処理装置、撮像装置、画像処理方法 | |
| JP5675233B2 (ja) | 情報処理装置、その認識方法及びプログラム | |
| JP6234762B2 (ja) | 眼部検出装置、方法、およびプログラム | |
| JPH0944685A (ja) | 顔画像処理装置 | |
| US20060008173A1 (en) | Device and method for correcting image including person area | |
| KR19990013317A (ko) | 얼굴 화상 처리 장치 | |
| JP2008243093A (ja) | 辞書データの登録装置及び辞書データの登録方法 | |
| JP3063504B2 (ja) | 画像データの特徴量検出装置 | |
| CN109033955A (zh) | 一种人脸跟踪方法和系统 | |
| US20220156959A1 (en) | Image processing device, image processing method, and recording medium in which program is stored | |
| JP4989249B2 (ja) | 目検知装置、居眠り検知装置及び目検知装置の方法 | |
| JP4082203B2 (ja) | 開閉眼判定装置 | |
| JP6444331B2 (ja) | 対象識別装置 | |
| JP4011426B2 (ja) | 顔検出装置、顔検出方法および顔検出プログラム | |
| JP3088880B2 (ja) | 人物認識装置 | |
| JP3444115B2 (ja) | 居眠り状態検出装置 | |
| KR20220151165A (ko) | 정보 처리 장치, 정보 처리 방법 및 프로그램 | |
| US8144946B2 (en) | Method of identifying symbolic points on an image of a person's face | |
| JP4123076B2 (ja) | 運転者状態検出装置 | |
| JP2005013626A (ja) | 覚醒状態検出装置 | |
| JP3629164B2 (ja) | 顔画像処理装置 | |
| JP2004341953A (ja) | 顔部位追跡装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20041216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050104 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050217 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050913 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051019 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060131 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060202 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100210 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100210 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110210 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120210 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130210 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130210 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140210 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |