JP3762974B2 - 搬送装置、並びに、倉庫装置 - Google Patents
搬送装置、並びに、倉庫装置 Download PDFInfo
- Publication number
- JP3762974B2 JP3762974B2 JP2002043745A JP2002043745A JP3762974B2 JP 3762974 B2 JP3762974 B2 JP 3762974B2 JP 2002043745 A JP2002043745 A JP 2002043745A JP 2002043745 A JP2002043745 A JP 2002043745A JP 3762974 B2 JP3762974 B2 JP 3762974B2
- Authority
- JP
- Japan
- Prior art keywords
- article
- transport
- conveyance
- roller
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Landscapes
- Relays Between Conveyors (AREA)
- Warehouses Or Storage Devices (AREA)
Description
【発明の属する技術分野】
本発明は、複数の搬送モジュールが直列に配置された搬送装置、並びに、当該搬送装置が設置された倉庫装置に関するものである。
【0002】
【従来の技術】
従来より、物品を高密度に収納できる倉庫装置として、上下方向に多層の物品収納棚を設けた立体倉庫が公知である。この様な立体倉庫には、物品を物品収納棚の所定の位置に効率よく収納すべく、特開2000−168912号公報等に記載されているようなスタッカークレーンが多用されている。前記倉庫装置は、前後方向に移動可能なスタッカークレーンの両側に、前後方向および上下方向に多数の棚を有する保管ラックを配置したものである。物品や物品を搭載したパレットは、スタッカークレーンにより保管ラックの所定の位置まで搬送され、収納される。
【0003】
【発明が解決しようとする課題】
上記したスタッカークレーンによれば、前後方向および上下方向に物品や物品を搭載したパレットを移動し、所定位置の保管ラックに収納することができる。しかし、スタッカークレーンの設置には極めて大きなスペースを必要とするため、倉庫全体に対するスタッカークレーンの占有スペースが大きくなってしまう。従って、スタッカークレーンを採用した倉庫装置は、物品の収納密度が低下せざるを得ないという問題がある。
【0004】
また、スタッカークレーンは、多数の物品を同時進行で搬送することができない。そのため、収納すべき物品の数が多い場合や、物品の種類が多岐にわたる場合などは、スタッカークレーンが倉庫内を何度も往復する必要があり、作業効率が大幅に低下してしまうという問題がある。
【0005】
そこで上記した問題を解決すべく、設置に要するスペースが小さく、多数の物品を同時進行で搬送することが可能な搬送装置、並びに、当該搬送装置を備えた倉庫装置の提供を目的とした。
【0006】
【課題を解決するための手段】
そこで、上記した課題を解決すべく提供される請求項1に記載の発明は、上下所定の段数の載置部のいずれかに物品を格納するための搬送装置であって、物品を搭載して搬送する複数の搬送モジュールを直列に配置したものであり、前記搬送モジュールのうち少なくとも1基は、物品が搭載される物品搬送部と、当該物品搬送部を搬送方向の上流側あるいは下流側の端部が上方側あるいは下方側に向くように昇降させる昇降手段とを具備しており、物品搬送部には、搬送方向を変換する搬送方向変換手段が設けられており、常時は物品搬送部が上下方向に傾斜するように配置され、物品搬送部の搬送モジュールは、物品を順次移送可能であり、格納すべき載置部の前の搬送モジュールに物品が到達した際に、当該搬送モジュールの昇降装置が作動して物品搬送部が前記載置部に沿う様に水平になることを特徴とする搬送装置である。
【0007】
かかる構成によれば、昇降手段によって搬送モジュールの物品搬送部の端部を昇降させることにより、必要に応じて物品の搬送経路を立体的に編成することができる。そのため、本発明の搬送装置によれば、物品を立体的に搬送することが可能であり、上下方向に複数の棚を有する立体倉庫などに物品を搬出入する搬送装置として好適に使用できる。
【0008】
また、本発明の搬送装置は、複数の物品を連続して搭載しても、物品毎に搬送経路を変更することにより、的確な位置に物品を搬送することができる。従って、本発明の搬送装置は、物品の搬出入を効率よく行える。
【0009】
また本発明の搬送装置によれば、物品の搬送方向を、搬送方向変換手段により変換する ことが可能であり、物品の搬送方向が多岐にわたっている。そのため、本発明の搬送装置は、ローラおよび搬送方向変換手段を制御することにより、物品を任意の方向へ搬送することができる。
【0010】
請求項2に記載の発明は、上下所定の段数の載置部のいずれかに物品を格納するための搬送装置であって、物品を搭載して搬送する複数の搬送モジュールを直列に配置したものであり、前記搬送モジュールのうち少なくとも1基は、物品が搭載される物品搬送部と、当該物品搬送部の姿勢を上方側あるいは下方側に向けて揺動させる揺動手段とを具備しており、物品搬送部には、搬送方向を変換する搬送方向変換手段が設けられており、常時は物品搬送部が上下方向に傾斜するように配置され、物品搬送部の搬送モジュールは、物品を順次移送可能であり、格納すべき載置部の前の搬送モジュールに物品が到達した際に、当該搬送モジュールの揺動手段が作動して物品搬送部が前記載置部に沿う様に水平になることを特徴とする搬送装置である。
【0011】
かかる構成によれば、揺動手段によって搬送モジュールが上下方向に向くように揺動させることにより、物品の搬送経路を適宜立体的に編成することができる。そのため、本発明の搬送装置によれば、物品を立体的に搬送することが可能であり、上下方向に複数の棚を有する立体倉庫などに物品を搬出入する搬送装置として好適に使用できる。
【0012】
また、本発明の搬送装置は、複数の物品を連続して搭載しても、物品毎に搬送経路を変更することにより、的確な位置に物品を搬送することができる。従って、本発明の搬送装置は、物品の搬出入の作業効率が高い。
【0013】
また本発明の搬送装置によれば、物品の搬送方向を、搬送方向変換手段により変換することが可能であり、物品の搬送方向が多岐にわたっている。そのため、本発明の搬送装置は、ローラおよび搬送方向変換手段を制御することにより、物品を任意の方向へ搬送することができる。
【0014】
請求項1又は2に記載の搬送装置において、物品搬送部は、固定軸に対して回転自在なローラが複数、並列に配置されたローラコンベアであってもよい。(請求項3)
【0015】
請求項4に記載の発明は、ローラの少なくとも1つが、ローラ固定軸に対して回転自在に支持され、ローラ本体内にモータと減速機とが内蔵されたモータ内蔵ローラであることを特徴とする請求項3に記載の搬送装置である。
【0016】
かかる構成によれば、物品搬送部に搭載された物品をモータ内蔵ローラの回転動力により搬送することができる。そのため本発明の搬送装置は、物品搬送部のローラの駆動源を別途設ける必要がなく、搬送装置全体を小型化できる。
【0017】
請求項5に記載の発明は、物品搬送部は、水平方向の軸を中心として回転し、物品を搬送するローラを有することを特徴とする請求項1乃至4のいずれかに記載の搬送装置である。
【0018】
また、請求項6に記載の発明は、搬送方向変換手段が、クロスコンベアであり、当該クロスコンベアは、内部にモータと減速機が内蔵された筒体と筒体から突出した軸を有し、前記筒体と軸とが相対的に回転するモータ内蔵筒と、モータ内蔵筒の筒体に取り付けられたカムと、回転を当該回転軸と交わる軸を中心とする回転に変更して伝達する回転軸変更機構と、無端長尺物と、無端長尺物を駆動する駆動側回転物と、駆動側回転物に対して近接・離反方向に移動可能な他端側部材を有し、前記無端長尺物は駆動側回転物と他端側部材の間に懸架され、前記モータ内蔵筒は、概ね無端長尺物に包囲される位置にあり、モータ内蔵筒の軸は、回転軸変更機構を介して駆動側回転物と係合し、さらにモータ内蔵筒と無端長尺物の間であって前記カムと無端長尺物の双方と接触可能な位置に支持部材が設けられ、前記軸が絶対的に回転した時、軸の回転力が駆動側回転物に伝動されて無端長尺物が走行し、筒体が絶対的に回転した時筒体と共にカムが回転して支持部材を昇降し、無端長尺物の一部を内外に移動させるものであることを特徴とする請求項5に記載の搬送装置である。
【0019】
本発明の搬送装置において採用される搬送方向変換手段は、無端長尺物によって包囲される位置に、主要な構成部品が納まるものであり、極めて小型であるため、搬送装置全体を小型化できる。そのため、本発明の搬送装置は、大きな設置スペースを必要とせず、手狭な場所にも容易に設置することが可能である。
【0020】
請求項7に記載の発明は、物品搬送部の全長はその幅の2倍以下であることを特徴とする請求項1乃至6のいずれかに記載の搬送装置である。
【0021】
本発明の搬送装置は、物品搬送部の全長がその幅の2倍以下であり、全長が短い。そのため、本発明の搬送装置は、装置全体の小型化が可能である。また、搬送モジュールの全長が短いため、限られた空間内において搬送経路を容易に調整できる。
【0022】
上記した搬送装置において採用される昇降手段および揺動手段は、モータおよび減速機が内蔵された昇降用ローラと、当該昇降用ローラに連動して回転可能である昇降部材を有し、連結部材を介して物品搬送部に対して回転自在に接続されており、前記昇降部材は、摺動部材を介して前記物品搬送部に摺動自在に接続されており、前記物品搬送部には前記摺動部材の摺動方向を規制する摺動方向規制手段が設けられていることを特徴とするものとすることが可能である。
【0023】
上記した構成の昇降手段および揺動手段は、昇降用ローラおよび昇降部材が回転すると、摺動部材は、摺動方向規制手段により摺動方向を規制されながら摺動し、物品搬送部を昇降手段に対して上方あるいは下方へと押し動かす。昇降手段と物品搬送部とは、連結部材を介して回転自在に接続されているため、昇降用ローラの回転に伴い前記連結部材を中心として物品搬送部が回転し、上下方向に傾斜する。従って、上記した構成の昇降手段を備えた搬送装置は、昇降用ローラの回転を制御することで物品の搬送経路を上下方向に自由に変更することができる。
【0024】
上記した搬送装置において、昇降手段および揺動手段は、アクチュエータを具備していることを特徴とするものとすることも可能である。
【0025】
かかる構成によれば、アクチュエータを駆動させることにより、物品搬送部を所望の位置および角度まで昇降させることができる。そのため、本発明の搬送装置は、物品の搬送経路を上下方向に自由に変更することができる。
【0026】
また、上記した搬送装置において、昇降手段および揺動手段は、油圧シリンダあるいは空気圧シリンダを具備しているものであってもよい。
【0027】
請求項8に記載の発明は、少なくとも一方側が開口した物品格納棚と、当該物品格納棚を上下方向に分割し、物品を格納し載置する載置部とを有し、前記物品格納棚の開口側には請求項1乃至7のいずれかに記載の搬送装置が上下方向に傾斜するように配置されており、当該搬送装置は、昇降手段または揺動手段が作動すると、物品搬送部が前記載置部に沿うように揺動することを特徴とする倉庫装置である。
【0028】
本発明の倉庫装置によれば、搬送装置に搭載された物品を、格納すべき載置部の高さまで移動させることができる。さらに、所定の高さまで物品を移動させた後、当該物品が搭載された物品搬送部を、前記載置部に沿うように揺動させることにより、前記物品を所望の載置部に的確に移載することができる。
【0029】
また、本発明の倉庫装置を具備した倉庫は、搬送装置がコンパクトな構成であるため、倉庫内に大きな物品の保管スペースを確保することができ、物品の収納密度を向上させることができる。
【0030】
さらに、本発明の倉庫装置は、多数の物品を搬送装置に搭載し同時進行で搬送することができる。そのため、本発明の倉庫装置は、物品を連続して搬送することができ、作業効率が極めて高い。
【0031】
【発明の実施の形態】
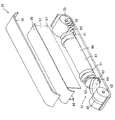
以下、本発明の第1実施形態について、図面を参照しながら詳細に説明する。図1は、本発明の第1実施形態である倉庫装置および搬送装置を示す斜視図である。図1において、1は倉庫装置であり、2は搬送装置である。また、図2は、搬送装置2を構成する搬送モジュールを示す斜視図である。図2において、3は本実施形態の搬送モジュールである。
【0032】
倉庫装置1は、倉庫5内に配置された物品格納棚6と、物品格納棚6に対して上下方向に傾斜するように配置された搬送装置2とを具備している。物品格納棚6は、搬送装置2と隣接しており、物品の搬入・搬出のために搬送装置2側の前方側面7が開口している。また、前方側面7に隣接する左方側面8も開口しており、左方側面8側から物品格納棚6のメンテナンスを行える。また、物品格納棚6は、載置棚9により上下方向に等間隔に5分割され、載置部10(以下、載置部10a,10b,10c,10d,10eと称す)が形成されている。
【0033】
図1に示すように、載置部10には、物品の搬送方向が前方側面7側から物品格納棚6の奥側に向かうようにローラコンベア11が敷設されている。ローラコンベア11は、平行したフレーム12,12の間に支軸に対して自由に回転可能なフリーローラ13および後述するモータ内蔵ローラ24が複数並設されたものである。また、ローラコンベア11の中途で、物品の搬送方向を変換すべき位置には、フリーローラ13およびモータ内蔵ローラ24の間に後述するクロスコンベア25が配置されている。
【0034】
搬送装置2は、物品を搭載して搬送する5台の搬送モジュール3(以下、搬送モジュール3a,3b,3c,3d,3eと称す)が、直列に配置されたものである。搬送装置2は、物品格納棚6の前方側面7側に配置されており、常時は物品の搬送面が上下方向に傾斜している。図2に示すように、搬送装置2を構成する搬送モジュール3は、物品が搭載される物品搬送部20と、昇降部(昇降手段)21とを有する。
【0035】
物品搬送部20は、平行に配置された2本のフレーム22の間に、モータ内蔵ローラ24が複数並設されたものであり、全長がその幅の2倍以下である。また、物品搬送部20の隣接するモータ内蔵ローラ24の間には、物品の搬送方向を変換するクロスコンベア(搬送方向変換手段)25が設けられている。フレーム22には、フレーム22の長尺方向に長い案内溝23a(摺動方向規制手段)と、軸孔23bとが設けられている。
【0036】
図3は、モータ内蔵ローラ24の断面図であり、図4はその機構図である。モータ内蔵ローラ24は、ローラ本体26内にモータ27と減速機28とが内蔵されたものである。ローラ本体26は、両端が開口した金属製の筒体であり、両端に閉塞部材30,31が一体的に取り付けられ閉塞されている。ローラ本体26の両端からは、固定軸32,33が突出している。ローラ本体26は、固定軸32,33に回転自在に支持されている。固定軸32,33は、それぞれ物品搬送部20のフレーム22に固定されている。即ち、モータ内蔵ローラ24は、フレーム22に対して回動自在に固定されている。
【0037】
ローラ本体26内には、モータ27が一体的に固定されている。モータ27は、内筒部材35内に電磁石からなる複数の固定子36と、磁極を有する回転子37と、位置検出子38とを備えたブラシレスモータである。回転子37の一端側は、軸受け40を介して固定軸32に支持されている。また、回転子37の他端側は、減速機28に軸受け41を介して固定されている。位置検出子38は、回転子37の近傍に配置され、回転子37の磁極の周方向の位置を検知し、磁極検知信号を発信するものである。
【0038】
モータ27は、回転子37の回転駆動を制御するモータ駆動制御装置(図示せず)に接続されている。モータ内蔵ローラ24は、モータ27の回転動力により回転駆動するものであるため、モータ駆動制御装置は、モータ内蔵ローラ24のローラ駆動制御装置として機能する。モータ駆動制御装置は、倉庫装置1全体の駆動を司るプログラマブルコントローラなどの上位の制御システムからの制御信号に基づき各固定子36へ電力を供給し、モータ内蔵ローラ24の回転駆動を制御する。
【0039】
減速機28は、3連の遊星歯車列により構成されるものであり、モータ27の回転子37に接続されている。モータ27において発生した回転動力は、減速機28により所定の減速比で減速され、減速機28から突出した中心軸45を回転させる。減速機28の中心軸45は、連結部材46を介して閉塞部材31に連結されている。よって、モータ27の回転動力は、減速機28において減速された後、連結部材40を介して閉塞部材31へと伝播される。閉塞部材31は、ピン47によってローラ本体26と一体化されているため、ローラ本体26は、閉塞部材31に伝播された回転動力により回転駆動する。
【0040】
図5は、物品搬送部20が具備し、搬送方向変換手段として機能するクロスコンベア25の分解斜視図である。クロスコンベア25は、モータ内蔵筒50、カム51、回転軸変更機構52、駆動側プーリ(駆動側回転物)53と、従動側プーリ(他端側部材)55、無端ベルト56、支持部材57及びバネ58がフレーム(図示せず)の内部に収容された構成である。モータ内蔵筒50は、物品搬送部20のモータ内蔵ローラ24とほぼ同様の構造を有する。モータ内蔵筒50は、両端から突出した軸に対して相対的に回転する構造である。クロスコンベア25において、モータ内蔵筒50のローラ本体61は、ブラケット62により図示しないフレームに固定されている。また、カム51は、ローラ本体61上にカム51の中心がローラ本体61の中心に対して偏心した位置になるように取り付けられている。
【0041】
回転軸変更機構52は、傘状の摩擦車63と中間摩擦車64および駆動側プーリ53の表面に設けられた溝65により構成され、駆動側プーリ53とモータ内蔵筒50の中間に配置されている。摩擦車63は、前記したモータ内蔵筒50の軸に接続されている。また、中間摩擦車64は、摩擦車63および駆動側プーリ53の表面に設けられた溝65に係合する構造である。また、支持部材57は天面66と左右の側面67,68により構成される箱状の部材である。天面66は、下向きに湾曲したそり状の部材であり、モータ内蔵筒50を覆う構成である。
【0042】
モータ内蔵筒50の両端には駆動側プーリ53と従動側プーリ55が、共に回転軸がモータ内蔵筒50の回転軸に直行する向きに、フレーム(図示せず)に取り付けられる。なお、従動側プーリ55は、駆動側プーリ53との軸間距離が変化できるようにフレームに取り付けられる。さらに従動側プーリ55にはバネ58が当接している。従動側プーリ55は、バネ58により駆動側回転物53から離れる方向に押圧されている。無端ベルト56は、無端ベルト56の裏面が支持部材57の天面に覆い被さる形態で、駆動側プーリ53と従動側プーリ55とに懸架されている。
【0043】
図2に示すように、物品搬送部20を昇降させる昇降部21は、平行に配置された長尺のフレーム70,70の間に、昇降用ローラ71が回転自在に取り付けられたものである。フレーム70,70の間隔は、物品搬送部20のフレーム22,22の間隔よりも大きい。昇降用ローラ71は、ローラ本体72内にモータ(図示せず)と減速機(図示せず)とを内蔵したものである。昇降用ローラ71は、ローラ本体72の両端から突出した軸73に対して相対的に回転する。
【0044】
ローラ本体72の両端には、ローラ本体72よりも大径のリング75が一体的に取り付けられている。リング75には、長尺の昇降ロッド76(昇降部材)が一体的に設けられている。昇降ロッド76の他端側には、摺動軸78(摺動部材)が取り付けられている。摺動軸78は、物品搬送部20のフレーム22,22間の間隔と略同等の長さを有する。摺動軸78は、物品搬送部20のフレーム22,22に設けられた案内溝23a,23aに、モータ内蔵ローラ24と平行となるように挿通されており、これにより昇降ロッド76と物品搬送部20とが接続されている。
【0045】
フレーム70の端部には、連結部材80の一端側が固定されている。連結部材80の他端側には、物品搬送部20のフレーム22に設けられた軸孔23bに挿通された支持軸81が取り付けられている。支持軸81は、物品搬送部20のフレーム22,22の間隔より僅かに長く、端部が連結部材80から突出している。昇降用ローラ71が回転し、摺動軸78が案内溝23aに沿って摺動すると、物品搬送部20は摺動軸78により押し動かされ、支持軸81を支軸として上下方向に回動する。
【0046】
搬送装置2は、隣接した搬送モジュール3同士をモジュール連結部材83により5基連結したものである。モジュール連結部材83は、隣接する搬送モジュール3の昇降部21を構成するフレーム70の端部同士を階段状に連結するものである。搬送装置2は、物品格納棚6の前方側面7に隣接する位置に配置されており、全体として物品搬送部20が搬送方向の下流側に向かうに従って上方に向かうように傾斜している。また、搬送装置2は、搬送モジュール3a,3b,3c,3d,3eを支持軸81を中心として回動し、倉庫5の床面に対して水平とした際に、それぞれの物品搬送部20と、載置部10a,10b,10c,10d,10eの底面とが略同一の高さとなるように配置されている。
【0047】
搬送装置2の最も下方側に位置する搬送モジュール3aに隣接する位置に、搬送モジュール3aの搬送方向に対して交差する方向に、物品を搬送可能な長尺の搬送装置85が配置されている。搬送装置85は、長尺のフレーム86,86の間に上記したフリーローラ13およびモータ内蔵ローラ24が並置され回転自在に固定されたものである。また、搬送装置85の中途で、搬送モジュール3aに面する位置は、分岐部87となっている。分岐部87には、フリーローラ13およびモータ内蔵ローラ24の間に上記したクロスコンベア25が配置されている。そのため、搬送装置85上を移動し、分岐部87に至った物品は、必要に応じてクロスコンベア25により搬送装置2側へと移載される。
【0048】
一方、搬送装置2の最も上方側に位置する搬送モジュール3eに隣接する位置には、搬送モジュール3eの搬送方向に対して交差する方向に物品を搬送可能な搬送装置90が配置されている。搬送装置90は、搬送装置85と同様にフレーム91,91にフリーローラ13およびモータ内蔵ローラ24を回転自在に固定したものである。搬送装置90の端部で、搬送モジュール3eに面する位置には分岐部92が形成されている。分岐部92には、分岐部87と同様にフリーローラ13およびモータ内蔵ローラ24の間に上記したクロスコンベア25が配置されている。そのため、搬送装置2上を移動した物品は、分岐部92において搬送方向を転換し、搬送装置90上を移動する。
【0049】
続いて、本実施形態の倉庫装置1および搬送装置2の動作を、物品の搬送手順を順次示すことにより説明する。図6,7,8は、それぞれ搬送モジュール3の動作を模式的に示した側面図である。図6は、物品が搬送装置2の下流側へと移動している際の搬送モジュール3を示す側面図である。図8は、搬送装置2上の物品を載置部10側へ移載する際における搬送モジュール3を示す側面図である。図7は、図6と図8との中途の状態における搬送モジュール3を示す側面図である。
【0050】
倉庫装置1の駆動を司る制御システム(図示せず)からの制御信号に基づき、搬送装置85のモータ内蔵ローラ24が回転すると、搬送装置85上に搭載された物品は、順次分岐部87側へと移動を開始する。分岐部87に物品格納棚6に格納すべき物品が差し掛かると、制御システムの制御信号に基づき、分岐部87に設けられたクロスコンベア25に電力が供給される。
【0051】
クロスコンベア25に電力が供給されると、モータ内蔵筒50のローラ本体61が回転し、ローラ本体61に取り付けられたカム51が回動する。この時、カム51は、支持部材57の天面66の内側と接し、天面66を上方に押し上げる。その結果、支持部材57が上昇し、そり状の天面66が無端ベルト56の走行面を上方に押圧する。上方に押圧された無端ベルト56の走行面は、搬送装置85のフリーローラ13およびモータ内蔵ローラ24よりも上方に露出し、分岐部87上の物品をすくい上げる。
【0052】
支持部材57が最高点に達すると、カム51がそれ以上回転し得なくなり、モータ内蔵筒50のローラ本体61の回転が停止する。ここでモータ内蔵筒50は、ローラ本体61と軸60とが相対的に回転するものであるため、ローラ本体61の回転が停止すると、軸60が絶対的に回転する。その結果、回転軸変更機構52を介して駆動側プーリ53が回転し、無端ベルト56が走行を開始する。そのため分岐部87上の物品は、横方向に移動し、搬送装置2側へと乗り移る。物品の移送が完了すると、モータ内蔵筒50を逆方向に回転させ、支持部材57を降下し、無端ベルト56の走行面を沈める。
【0053】
倉庫装置1の制御システムは、格納すべき載置部より下方側に位置する搬送モジュール3の物品搬送部20に取り付けられたモータ内蔵ローラ24に順次電力を供給する。さらに具体的には、例えば載置部10cに物品を格納する場合は、搬送モジュール3a,3b,3cのモータ内蔵ローラ24に通電し、搬送モジュール3c上まで物品を移動させる。搬送モジュール3c上に物品が到達すると、制御システムは、搬送モジュール3cのモータ内蔵ローラ24への通電を停止し、搬送モジュール3c上に物品を停止させる。
【0054】
物品が搬送モジュール3c上に停止すると、制御システムは、搬送モジュール3cの昇降部21に設けられた昇降用ローラ71に通電する。それに伴い、昇降用ローラ71およびリング75に取り付けられた昇降ロッド76は、図6中の矢印の方向に回転する。昇降ロッド76が回転すると、摺動軸78は物品搬送部20の案内溝23aに沿って連結部材80側へと摺動する。物品搬送部20は、摺動軸78によって押し動かされ、図7に示すように支持軸81を支点として昇降部21側へと屈曲し始める。さらに昇降用ローラ71を回転させると、図8に示すように物品搬送部20のフレーム22が水平になる。
【0055】
物品搬送部20のフレーム22が水平になると、倉庫装置1の制御システムの制御信号に基づき、搬送モジュール3cに設けられたクロスコンベア25に電力が供給される。クロスコンベア25は、搬送モジュール3c上に停止している物品をすくい上げた後、無端ベルト56を走行させ、物品を載置部10c側へと移動させる。載置部10c側に移動した物品は、載置部10c上に配置されたローラコンベア11上を移動し、所定の位置に到達する。
【0056】
搬送装置85から搬送装置2に移載された物品を、物品格納棚6に収納しない場合、物品は搬送モジュール3eから搬送装置90へと移載される。即ち、物品が搬送モジュール3eの上端部に至ると、分岐部92のクロスコンベア25が駆動し、物品をすくい上げた後にクロスコンベア25上に移動させる。物品が分岐部92上に移動すると、制御システムは、クロスコンベア25を下降させ、搬送装置90のモータ内蔵ローラ24に電力を供給する。モータ内蔵ローラ24が回転を開始すると、分岐部92上の物品は搬送装置90の下流側へと移動する。
【0057】
倉庫装置1は、物品の搬送方向を逆転させることにより、物品格納庫6よりも上方にある搬送装置90に搭載された物品を物品格納庫6に収納することも可能である。
【0058】
また、上記実施形態において、搬送装置2は、搬送モジュール3を5基連結したものであったが、物品格納庫6の大きさや載置棚9の段数に応じて適宜搬送モジュール3の連結台数を設定できる。また、搬送モジュール3の傾斜角度についても、倉庫5のスペースや物品格納庫6の大きさ等に応じて適宜変更可能である。
【0059】
本実施形態の搬送措置2は、複数の搬送モジュール3の昇降部21をモジュール連結部材83により階段状に連結し上下方向に傾斜させたものであるが、階段状の台座等を別途用意し、当該台座に各搬送モジュール3を固定する構造としてもよい。
【0060】
本実施形態の倉庫装置1は、搬送装置2がスタッカークレーンに代表される従来の搬送装置に比べてコンパクトな構成であり、倉庫に対する搬送装置2の占有スペースが小さい。そのため、本実施形態の倉庫装置1によれば、倉庫5内の物品の収納スペースを大きく取り、物品の収納密度を向上できる。
【0061】
また、本実施形態の搬送装置2は、一度に多数の物品を搭載し、同時進行で搬送し、収納すべき載置棚9上に的確に移載することができる。そのため、搬送装置2によれば、物品を効率よく搬送することができる。
【0062】
上記した実施形態では、載置部10cに物品を格納する場合を例示し、搬送装置2の動作を説明したが、載置部10a,10b,10d,10eに物品を格納する場合についても同様にして物品を格納することができる。
【0063】
なお、上記第1実施形態において、載置部10にローラコンベア11並びにクロスコンベア25を敷設した構成を例示したが、本発明はこれに限定されるものではなく、特開2002−2932号公報に開示されている搬送方向変換装置に代表されるあらゆる搬送装置を敷設した構成とすることも可能である。
【0064】
続いて、本発明の第2実施形態の倉庫装置について説明する。なお、本実施形態の倉庫装置は、上記第1実施形態の倉庫装置1とほぼ同様の構成を有するため、共通する部分には同一の符号を付し、詳細の説明については省略する。
【0065】
図9は、本実施形態の倉庫装置95および搬送装置97の側面図である。本実施形態の倉庫装置95は、物品格納庫96と、物品格納庫96に対して上下方向に傾斜するように配置された搬送装置97とを有する。物品格納庫96は、上記した物品格納庫6と同様の載置棚98により上下方向に6分割されており、これにより載置部99(以下、物品格納庫96の下方より載置部99a,99b,99c,99d,99e,99fと称す)が形成されている。載置部99には、上記第1実施形態と同様に、フリーローラ13およびモータ内蔵ローラ24を備えたローラコンベア11(図示せず)が設けられている。また、ローラコンベア11の中途で、物品の搬送方向を変換すべき位置には、フリーローラ13およびモータ内蔵ローラ24の間にクロスコンベア25が配置されている。
【0066】
本実施形態の倉庫装置95は、物品格納庫96に隣接する位置に設けられている搬送装置97が上記第1実施形態と異なる。搬送装置97は、7基の搬送モジュール100(以下、搬送モジュール100a,100b,100c,100d,100e,100f,100gと称す)を具備している。
【0067】
搬送モジュール100は、上記した搬送モジュール3と同様の物品搬送部20と昇降部102とを有する。昇降部102は、図10に示すように平行に配置されたフレーム103に、油圧シリンダ105(アクチュエータ)を設けたものである。油圧シリンダ105のロッド106の突出長さは、倉庫装置95の制御システムにより制御される。ロッド106の先端側は、物品搬送部20のフレーム22に接続されている。一方、物品搬送部20と昇降部102とは、搬送モジュール3と同様に連結部材80により連結されており、物品搬送部20は、物品搬送部20のフレーム22の軸孔82に挿通された支持軸81を中心として昇降部102に対する傾斜角を変更できる。
【0068】
図9に示すように、搬送モジュール100a,100b,100c,100e,100f,100gは、昇降部102のフレーム103が載置部99a,99b,99c,99e,99fの底面を構成する載置棚9と同一の高さとなるように、ボルト108により支柱107a,107b,107c,107dに水平に固定されている。さらに詳細には、搬送モジュール100a,100b,100c,100e,100f,100gは、物品を物品格納庫96の下方側から上方側へ搬送する際の搬送経路の上流側に支持軸81側が位置するように各支柱に固定されている。
【0069】
搬送モジュール100dは、支柱107d,107eにより載置部99cの中間の高さで水平に固定されている。搬送モジュール100dは、支持軸81側が支柱107e側となるように固定されている。搬送モジュール100dは、搬送モジュール100a側から流れてきた物品の搬送方向を転換し、搬送モジュール100eへと移載する、物品移載装置として機能する。換言すれば、搬送装置97の搬送経路は、搬送モジュール100dを中心として扇状に広がっており、搬送モジュール100dを境として物品が往き戻りする。即ち、搬送装置97に搭載された物品は、搬送モジュール100dにおいて搬送方向が変換され、物品格納庫96の前方側面7に沿う方向に往復動する。
【0070】
続いて、本実施形態の倉庫装置95および搬送装置97の動作について説明する。本実施形態の搬送装置97において、搬送モジュール3aに搭載された物品が載置部99a,99b,99cのいずれか、即ち搬送モジュール100dよりも上流側の載置部99に収納するものである場合、倉庫装置95の制御システムは、格納すべき載置部より下方側に位置する搬送モジュール100のモータ内蔵ローラ24に順次電力を供給する。例えば、物品を載置部99bに収納する場合は、搬送モジュール100a,100bのモータ内蔵ローラ24に電力を供給する。それに伴い、搬送モジュール100aに搭載された物品は、順次上方へと移送され、搬送モジュール100bに至る。物品が搬送モジュール100bに到達すると、制御システムは、モータ内蔵ローラ24への電力の供給を止め、物品を所定の搬送モジュール100b上に停止させる。
【0071】
続いて、制御システムは、搬送モジュール100bの昇降部21を駆動させるべく、油圧シリンダー105のロッド106を短縮する。それに伴い、搬送モジュール3bの物品搬送部20が降下して水平となると、物品搬送部20の搬送面と載置部99bに設けられたローラコンベア11の搬送面とが面一となる。
【0072】
物品搬送部20が水平になると、搬送モジュール3bに設けられたクロスコンベア25が駆動を開始し、搬送モジュール3b上の物品が載置部99b上のローラコンベア11へと移動する。ローラコンベア11は、制御システムの制御信号に基づいて駆動し、物品を所定の位置まで搬送する。
【0073】
一方、搬送モジュール3aに搭載された物品が載置部99d,99e,99fのいずれか、即ち搬送モジュール100dよりも下流側の載置部99に収納されるものである場合について説明する。例えば、物品を載置部99eに収納する場合、倉庫装置95の制御システムは、先ず搬送モジュール100dの物品搬送部20を水平位置まで降下した状態とする。また、制御システムは、搬送モジュール100cのロッド106を突出させ、搬送モジュール100cの物品搬送部20の昇降側端部を搬送モジュール100dの物品搬送部20と同一の高さにする。続いて、制御システムは、搬送モジュール100a,100b,100cのモータ内蔵ローラ24に順次電力を供給し、搬送モジュール100dの物品搬送部20上まで物品を移送する。
【0074】
搬送モジュール100d上に物品が搭載されると、制御システムは、搬送モジュール100dのロッド106を突出させ、搬送モジュール100dの昇降側端部を移載部99dの底面とほぼ同一の高さとする。続いて、制御システムは、搬送モジュール100dのモータ内蔵ローラ24に電力を供給し、物品を搬送モジュール100e側へと搬送する。
【0075】
物品が搬送モジュール100eを経て搬送モジュール100fに至ると、制御システムは、搬送モジュール100fのモータ内蔵ローラ24への電力の供給を停止する。続いて、制御システムは、搬送モジュール100fの物品搬送部20が水平になるまでロッド106を短縮させる。搬送モジュール100fの物品搬送部20が水平となると、搬送モジュール100fのクロスコンベア25に電力が供給される。クロスコンベア25は、搬送モジュール100f上の物品をすくい上げた後、無端ベルト56を走行させ、物品を載置部99eのローラコンベア11側へと移載する。倉庫装置95の制御システムは、ローラコンベア11を駆動制御し、搬送モジュール100fから移載された物品を所定の位置まで移動させる。
【0076】
本実施形態の倉庫装置95は、搬送装置97が従来の搬送装置に比べてコンパクトな構成であり、倉庫に対する搬送装置97の占有スペースが小さい。そのため、本実施形態の倉庫装置1によれば、倉庫5内の物品の収納スペースを大きく取り、物品の収納密度を向上できる。
【0077】
また、本実施形態の搬送装置97は、搬送経路の中途に、物品移載装置として搬送モジュール100dを設けているため、搬送装置97をコンパクトな構成としつつ、搬送経路を緩やかに設定することができる。そのため、搬送装置97によれば、物品を落下させることなく所定の位置まで安定して搬送することができる。
【0078】
また、本実施形態の搬送装置97は、一度に多数の物品を搭載し、収納すべき載置棚9上まで同時進行で的確に搬送することができる。そのため、本実施形態の搬送装置97は、物品の搬送作業を効率よく行える。
【0079】
上記した実施形態では、載置部99fに物品を格納する場合を例示し、搬送装置2の動作を説明したが、載置部99a,99b,99d,99eに物品を格納する場合についても同様にして物品を格納することができる。また、載置部99a,99b,99d,99eから物品を搬出する場合についても、上記した動作手順を逆に行うことによって容易に物品を搬出することができる。
【0080】
本実施形態において、搬送モジュール100の物品搬送部20を昇降させる駆動源として、油圧シリンダ105を採用したが、本発明はこれに限定されるものではなく、空気圧シリンダ等あらゆるアクチュエータを駆動源として用いることができる。
【0081】
また、本実施形態の搬送装置97は、物品の搬送方向を転換するための物品移載手段として、他の搬送モジュール100と同一の搬送モジュール100dを採用したため、部品点数が少なくて済む。なお、本実施形態においては、物品移載手段として上記した搬送モジュール100dを採用したが、本発明はこれに限定されるものではなく、物品の搬送方向を変換できる機構を有するものであればいかなるものであっても採用できる。
【0082】
本実施形態において、搬送モジュール100は、物品搬送部20を水平面より上方側にのみ揺動させるものであったが、物品搬送部20を水平面より下方側にも揺動可能な構成とすることも可能である。即ち、搬送モジュール100は、物品搬送部20を水平面より上方側および下方側の双方に揺動可能なものとすることができる。かかる構成によれば、より少ない搬送モジュールで、物品の搬送経路を立体的に構成することができる。また、前記した構成の搬送モジュールは、物品の搬送方向を転換するための物品移載手段として用いることもできる。この場合、前記した搬送モジュールは、上記搬送装置97の3基の搬送モジュール100c,100d,100eにとって代わることができ、倉庫5内のスペースをより一層有効に利用することができる。
【0083】
続いて、本発明の第3実施形態の倉庫装置および搬送装置について説明する。なお、本実施形態の倉庫装置および搬送装置は、上記第1,2実施形態の倉庫装置および搬送装置とほぼ同様の構成であるため、共通する部分には同一の符号を付し、詳細の説明については省略する。
【0084】
図11は、本実施形態の倉庫装置および搬送装置を示す側面図である。図11において、110は本実施形態の倉庫装置であり、111は搬送装置である。なお、図11において、載置部10上に敷設されているローラコンベア11は図示せず省略している。
【0085】
倉庫装置110は、物品格納棚6と搬送装置111とを備えている。搬送装置111は、4基の搬送モジュール114(搬送モジュール114a,114b,114c,114d)と3基の連接コンベア115a,115b,115cとが支柱112a,112b,112c,112dにより連結されたものである。搬送モジュール114は、搬送モジュール3,100とほぼ同様の構造を有し、物品搬送部20がクロスコンベア25を持たない点のみが異なる。連接コンベア115a,115b,115cは、上記したローラコンベア11と同様に、平行したフレームに複数のフリーローラ13およびモータ内蔵ローラ24を併置したものである。連接コンベア115aは、搬送モジュール114aから載置部10aへと物品を搬送するものである。同様に連接コンベア115b,115cは、それぞれ搬送モジュール114b,114cから載置部10b,10cへと物品を搬送するものである。
【0086】
搬送モジュール114a,114b,114c,114dおよび連接コンベア115a,115b,115cは、支柱112a,112b,112c,112dに固定され、連結されている。搬送モジュール114a,114b,114c,114dは、昇降部21のフレーム103が載置部10a,10b,10c,10d,10eの底面を構成する載置棚9と同一の高さとなるように、ボルト113により支柱112a,112b,112c,112dに水平に固定されている。
【0087】
続いて、本実施形態の倉庫装置110および搬送装置111の動作について説明する。搬送装置111は、常時において搬送モジュール114の物品搬送部20が載置棚9に対して傾斜した状態となっている。搬送モジュール114aに物品が搭載されると、倉庫装置110の制御システムは、順次搬送モジュール114のモータ内蔵ローラ24に電力を供給し、ローラ本体26を回転させる。
【0088】
本実施形態の搬送装置111において、搬送モジュール114aに搭載された物品が載置部10cに収納するものである場合、倉庫装置110の制御システムは、格納すべき載置部より下方側に位置する搬送モジュール114a,114b,114cのモータ内蔵ローラ24に順次電力を供給する。それに伴い、搬送モジュール114aに搭載された物品は、順次上方へと移送され、搬送モジュール114cに至る。物品が搬送モジュール114cに到達すると、制御システムは、モータ内蔵ローラ24への電力の供給を止め、物品を所定の搬送モジュール114c上に停止させる。
【0089】
続いて、制御システムは、搬送モジュール114cの物品搬送部20を載置部10cの載置棚9と水平とするために、昇降部21の昇降用ローラ71に通電する。それに伴い、搬送モジュール114cの物品搬送部20が、支持軸81を中心として下方に回転し、物品搬送部20と載置棚9とが水平となる。
【0090】
物品搬送部20が水平になると、制御システムは、モータ内蔵ローラ24に再度電力を供給する。搬送モジュール114c上に停止していた物品は、連接コンベア115cへと移載される。連接コンベア115cに搭載された物品は、物品格納棚6側へと移動し、載置部10c上のローラコンベア11へと移載される。ローラコンベア11は、制御システムの制御信号に基づいて駆動し、物品を所定の位置まで搬送する。
【0091】
本実施形態の倉庫装置110は、搬送装置111がコンパクトな構成であり、倉庫5に対する占有スペースが小さい。そのため、本実施形態の倉庫装置110を採用した倉庫5は、物品の収納スペースが大きい。
【0092】
また、本実施形態の搬送装置111は、一度に多数の物品を搭載し、収納すべき載置棚9上まで同時進行で的確に搬送することができる。そのため、本実施形態の搬送装置97は、物品の搬送作業を効率よく行える。
【0093】
さらに、本実施形態の搬送装置111を構成する搬送モジュール114は、物品搬送部20にクロスコンベア25を設ける必要がない。よって、搬送装置111は、部品点数が少なく製造コストが低い。
【0094】
上記した実施形態では、載置部10cに物品を格納する場合を例示し、搬送装置2の動作を説明したが、載置部10a,10b,10d,10eに物品を格納する場合についても同様にして物品を格納することができる。また、載置部10a,10b,10d,10eから物品を搬出する場合についても、上記した動作手順を逆に行うことによって容易に物品を搬出することができる。
【0095】
また、上記各実施形態において、搬送モジュール2,100,114は、いずれも物品搬送部20を昇降させる昇降部21,102を具備するものであったが、本発明はこれに限定されず、物品搬送部20の姿勢を上方側あるいは下方側に向けて揺動させる揺動手段を具備するものであっても良い。揺動手段を具備する搬送モジュールの一例として、図12に示すような搬送モジュール120が挙げられる。搬送モジュール120は、揺動手段としてモータと減速機とを内蔵したギヤドモータ121を有し、ギヤドモータ121の回転軸122が、物品搬送部20のフレーム22の略中央に垂直に固定されたものである。物品搬送部20は、ギヤドモータ121が駆動すると回転軸122を中心として上下方向に揺動する。なお、物品搬送部20を揺動させる揺動手段は、ギヤドモータ121に限らずあらゆるアクチュエータ等を採用することができる。
【0096】
【発明の効果】
本発明の倉庫装置は、搬送装置がコンパクトな構成であるため、倉庫に対する占有スペースが小さい。そのため、本発明の倉庫装置によれば、倉庫の収納スペースを大きく取ることができる。
【0097】
また、本発明の搬送装置は、一度に多数の物品を搭載し、収納すべき位置まで同時進行で的確に搬送することができる。そのため、本発明の搬送装置によれば、物品の搬送作業を効率よく行える。
【図面の簡単な説明】
【図1】 本発明の第1実施形態である倉庫装置の斜視図である。
【図2】 本発明の第1実施形態における搬送モジュールを示す斜視図である。
【図3】 本発明の第1実施形態である搬送装置に用いられるモータ内蔵ローラの断面図である。
【図4】 図3に示すモータ内蔵ローラの機構図である。
【図5】 本発明の第1実施形態である搬送装置に用いられるクロスコンベアの分解斜視図である。
【図6】 本発明の第1実施形態における搬送モジュールの動作の第1段階を示す模式図である。
【図7】 本発明の第1実施形態における搬送モジュールの動作の第2段階を示す模式図である。
【図8】 本発明の第1実施形態における搬送モジュールの動作の第3段階を示す模式図である。
【図9】 本発明の第2実施形態の倉庫装置を示す側面図である。
【図10】 本発明の第2実施形態の搬送装置を構成する搬送モジュールを示す側面図である。
【図11】 本発明の第3実施形態の倉庫装置を示す側面図である。
【図12】 本発明の各実施形態において採用される搬送モジュールの変形実施例を示す斜視図である。
【符号の説明】
1,95,110 倉庫装置
2,97,111 搬送装置
3,100,114 搬送モジュール
6,96 物品格納棚(物品格納庫)
10,99 載置部
11 ローラコンベア
20 物品搬送部
21,102 昇降部(昇降手段)
23a 案内溝(摺動方向規制手段)
24 モータ内蔵ローラ
25 クロスコンベア(搬送方向変換手段)
26 ローラ本体
27 モータ
28 減速機
50 モータ内蔵筒
51 カム
52 回転軸変更機構
53 駆動側プーリ(駆動側回転物)
55 従動側プーリ(他端側回転物)
56 無端ベルト
57 支持部材
71 昇降用ローラ
76 昇降ロッド(昇降部材)
78 摺動軸(摺動部材)
80 連結部材
105 油圧シリンダ(アクチュエータ)
Claims (8)
- 上下所定の段数の載置部のいずれかに物品を格納するための搬送装置であって、物品を搭載して搬送する複数の搬送モジュールを直列に配置したものであり、前記搬送モジュールのうち少なくとも1基は、物品が搭載される物品搬送部と、当該物品搬送部を搬送方向の上流側あるいは下流側の端部が上方側あるいは下方側に向くように昇降させる昇降手段とを具備しており、物品搬送部には、搬送方向を変換する搬送方向変換手段が設けられており、常時は物品搬送部が上下方向に傾斜するように配置され、物品搬送部の搬送モジュールは、物品を順次移送可能であり、格納すべき載置部の前の搬送モジュールに物品が到達した際に、当該搬送モジュールの昇降装置が作動して物品搬送部が前記載置部に沿う様に水平になることを特徴とする搬送装置。
- 上下所定の段数の載置部のいずれかに物品を格納するための搬送装置であって、物品を搭載して搬送する複数の搬送モジュールを直列に配置したものであり、前記搬送モジュールのうち少なくとも1基は、物品が搭載される物品搬送部と、当該物品搬送部の姿勢を上方側あるいは下方側に向けて揺動させる揺動手段とを具備しており、物品搬送部には、搬送方向を変換する搬送方向変換手段が設けられており、常時は物品搬送部が上下方向に傾斜するように配置され、物品搬送部の搬送モジュールは、物品を順次移送可能であり、格納すべき載置部の前の搬送モジュールに物品が到達した際に、当該搬送モジュールの揺動手段が作動して物品搬送部が前記載置部に沿う様に水平になることを特徴とする搬送装置。
- 物品搬送部は、固定軸に対して回転自在なローラが複数、並列に配置されたローラコンベアであることを特徴とする請求項1又は2に記載の搬送装置。
- ローラの少なくとも1つは、ローラ固定軸に対して回転自在に支持され、ローラ本体内にモータと減速機とが内蔵されたモータ内蔵ローラであることを特徴とする請求項3に記載の搬送装置。
- 物品搬送部は、水平方向の軸を中心として回転し、物品を搬送するローラを有することを特徴とする請求項1乃至4のいずれかに記載の搬送装置。
- 搬送方向変換手段は、クロスコンベアであり、当該クロスコンベアは、内部にモータと減速機が内蔵された筒体と筒体から突出した軸を有し、前記筒体と軸とが相対的に回転するモータ内蔵筒と、モータ内蔵筒の筒体に取り付けられたカムと、回転を当該回転軸と交わる軸を中心とする回転に変更して伝達する回転軸変更機構と、無端長尺物と、無端長尺物を駆動する駆動側回転物と、駆動側回転物に対して近接・離反方向に移動可能な他端側部材を有し、前記無端長尺物は駆動側回転物と他端側部材の間に懸架され、前記モータ内蔵筒は、概ね無端長尺物に包囲される位置にあり、モータ内蔵筒の軸は、回転軸変更機構を介して駆動側回転物と係合し、さらにモータ内蔵筒と無端長尺物の間であって前記カムと無端長尺物の双方と接触可能な位置に支持部材が設けられ、前記軸が絶対的に回転した時、軸の回転力が駆動側回転物に伝動されて無端長尺物が走行し、筒体が絶対的に回転した時筒体と共にカムが回転して支持部材を昇降し、無端長尺物の一部を内外に移動させるものであることを特徴とする請求項5に記載の搬送装置。
- 物品搬送部の全長はその幅の2倍以下であることを特徴とする請求項1乃至6のいずれかに記載の搬送装置。
- 少なくとも一方側が開口した物品格納棚と、当該物品格納棚を上下方向に分割し、物品を格納し載置する載置部とを有し、前記物品格納棚の開口側には請求項1乃至7のいずれかに記載の搬送装置が上下方向に傾斜するように配置されており、当該搬送装置は、昇降手段または揺動手段が作動すると、物品搬送部が前記載置部に沿うように揺動することを特徴とする倉庫装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002043745A JP3762974B2 (ja) | 2002-02-20 | 2002-02-20 | 搬送装置、並びに、倉庫装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002043745A JP3762974B2 (ja) | 2002-02-20 | 2002-02-20 | 搬送装置、並びに、倉庫装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003246443A JP2003246443A (ja) | 2003-09-02 |
| JP3762974B2 true JP3762974B2 (ja) | 2006-04-05 |
Family
ID=28659024
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002043745A Expired - Fee Related JP3762974B2 (ja) | 2002-02-20 | 2002-02-20 | 搬送装置、並びに、倉庫装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3762974B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106068235B (zh) * | 2014-02-28 | 2021-06-01 | 伊东电机株式会社 | 输送装置 |
| CN109353807B (zh) * | 2018-12-04 | 2024-05-07 | 希肯医疗技术(苏州)有限公司 | 一种试管架自动传送装置 |
| CN111345635B (zh) * | 2018-12-20 | 2023-05-02 | 北京京东乾石科技有限公司 | 运动装置 |
-
2002
- 2002-02-20 JP JP2002043745A patent/JP3762974B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003246443A (ja) | 2003-09-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3665645B2 (ja) | 高速度収納装置 | |
| KR100518406B1 (ko) | 화물보관설비 | |
| JP3762974B2 (ja) | 搬送装置、並びに、倉庫装置 | |
| KR20100035628A (ko) | 자동적재장치의 적재함 회전안내장치 | |
| JP3163138U (ja) | 昇降機能付搬送装置 | |
| JP7397397B2 (ja) | 昇降搬送装置 | |
| JP2010046706A (ja) | ワーク搬送装置 | |
| CN113247502A (zh) | 中转装置、中转系统以及物流系统 | |
| JP2009196742A (ja) | 搬送装置 | |
| JP2002356205A (ja) | 自動倉庫及びその移載装置 | |
| CN110937352B (zh) | 轴承内外圈装配机组及轴承生产线 | |
| KR20050025941A (ko) | 디스플레이 제품용 카세트 반송이재 장치 | |
| EP3872004A1 (en) | A mini load crane for use in an automated warehouse and a method for storing and picking goods in the automated warehouse | |
| JP2003063639A (ja) | 搬送装置 | |
| WO2020095570A1 (ja) | 天井搬送車 | |
| KR101173120B1 (ko) | 천정 주행차 시스템 | |
| JP5571471B2 (ja) | タイヤ積込装置及びタイヤ積込方法 | |
| JP3832253B2 (ja) | 荷保管設備 | |
| JPH07157039A (ja) | コンベヤ装置 | |
| KR200302095Y1 (ko) | 물품 상하 이송장치 | |
| JP3804456B2 (ja) | 荷取り扱い設備 | |
| JP2024058483A (ja) | 昇降搬送装置 | |
| US20220297952A1 (en) | Movement device for moving roller boxes | |
| JPH0281815A (ja) | 水平回転棚 | |
| JP3832254B2 (ja) | 荷保管設備 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040405 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050922 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20051213 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20051221 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 3762974 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090127 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120127 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120127 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130127 Year of fee payment: 7 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |