JP3668614B2 - パワーステアリング装置 - Google Patents
パワーステアリング装置 Download PDFInfo
- Publication number
- JP3668614B2 JP3668614B2 JP19761498A JP19761498A JP3668614B2 JP 3668614 B2 JP3668614 B2 JP 3668614B2 JP 19761498 A JP19761498 A JP 19761498A JP 19761498 A JP19761498 A JP 19761498A JP 3668614 B2 JP3668614 B2 JP 3668614B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- state
- current
- vehicle speed
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/06—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle
- B62D5/065—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle characterised by specially adapted means for varying pressurised fluid supply based on need, e.g. on-demand, variable assist
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Description
【発明の属する技術分野】
本発明は、電動モータ駆動ポンプの発生油圧によりステアリング機構に操舵補助力を与えるパワーステアリング装置に関するものである。
【0002】
【従来の技術】
ステアリング機構に結合されたパワーシリンダにオイルポンプからの作動油を供給することにより、ステアリングホイールの操舵を補助するパワーステアリング装置が使用されている。オイルポンプは電動モータによって駆動され、その回転数に応じた操舵補助力がパワーシリンダから発生する。ステアリングが切り込まれていない状態では操舵補助力を要しないから、ステアリングが操舵中点近傍にある直進操舵状態(非操舵時)においては、電動モータを停止させ、操舵に連動する何らかの条件の変化が検出されたことに応答して電動モータを起動している。
【0003】
また、電力を節約し、油圧の立ち上がりをスムーズにするため、非操舵時においても、電動モータを低電圧で駆動するスタンバイ駆動が行われることも多くなっている。
【0004】
前記電動モータの制御においては、操舵時から非操舵に切り変わるタイミングの検出方法が種々考えられる。
【0005】
例えば、電動モータに流れる電流がステアリングトルクに応じて変化することに着目し、当該電流を検知して、当該検知電流の絶対値あるいは無負荷時の電流値からの相対変化量がしきい値を下回ったことで、電動モータを停止又は最小回転数にするという制御が提案されている(特開平5−69844号公報参照)。
【0006】
【発明が解決しようとする課題】
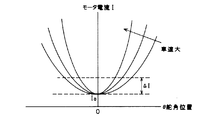
ところが、前述の制御方法では、舵角位置に対する電動モータ電流曲線は、図6に示すように、車速によって変化するため、一定の電流のしきい値ΔIに基づく判定では、車速の違いにより、モータ停止状態又はスタンバイ状態に入る舵角位置に違いが出てきて、ステアリング操作のフィーリングに変化が出てしまう。
【0007】
そこで、本発明は、車速の違いにかかわらず、ステアリング操作フィーリングが変化しないパワーステアリング装置を実現することを目的とする。
【0011】
【課題を解決するための手段】
本発明のパワーステアリング装置によれば、制御手段は、(a) 第1状態で、舵角の変化率dθ/dtが所定値以下であるかどうか、(b) 第1状態で、電流センサから検出される電流Iが、無負荷電流値I0から無負荷電流値I0に電流のしきい値ΔIを加えた範囲内にあるか、もしくは電流のしきい値ΔI以下であるかどうか、(c) 第1状態で、舵角θが中点から左右しきい値±Δθの範囲内にあるかどうかを判定する手段と、前記舵角のしきい値Δθを車両の速度に応じて変化する値として求める手段とを備え、
前記(a) の条件が満たされることと、前記(b) の条件が満たされることと、前記(c) の条件が満たされることの全部に基づいて、第1状態を第2状態に切り換えるものである。前記しきい値Δθは、車速が大きくなれば徐々に減少し、車速が小さいほど増加し、ある一定の車速よりも小さくなると、急激に増加する連続的特性を有するものである。この発明のパワーステアリング装置によれば、保舵状態(舵角の変化率dθ/dt≦所定値)であることを前提にして、電流センサから検出される電流Iが
I0≦I≦I0+ΔI もしくは 0≦I<ΔI (1)
を満たしているかどうか、及び舵角θが舵角中点から左右しきい値±Δθの範囲内にあるかどうか
θ0−Δθ<θ<θ0+Δθ (θ0は舵角中点を表す) (2)
を判定し、全部満たしていれば、アシスト状態からストップ状態もしくはスタンバイ状態に切り換える。ここでI 0 は、無負荷電流であり、ストップ状態であればI 0 =0、スタンバイ状態であれば作動油の温度等によって決まる値をとる。
【0012】
図2(a),(b) は、この判定条件を示すグラフであり、前記(1)式で特定される範囲を横線A−Aで示し、前記(2)式で特定される範囲を縦線B−Bで示す。
【0013】
この発明では、前記舵角のしきい値Δθを車両の速度に応じて変化する値として求めるので、前記縦線B−Bで制限される範囲は、車速に応じて変化する値となる。
【0014】
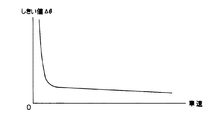
図3は、舵角のしきい値Δθと車速との関係を示したグラフである。車速が小さいほど舵角のしきい値Δθが高くなり、ある一定の車速よりも小さくなると、舵角のしきい値Δθは、急激に増加する。舵角のしきい値Δθが急増すると、舵角がどの位置にあっても前記(2)式は満たされるので、前記(2)式は実質的には条件として働かないことになる。一方、車速が大きくなれば舵角のしきい値Δθは徐々に減少していく。これにより車速が速くなるほど、ストップ状態もしくはスタンバイ状態となる舵角の範囲は狭くなることが判る。 このように舵角のしきい値Δθと車速との関係を設定したのは、停車時に、舵角の位置にかかわらず、操舵していない場合には、アシスト状態からストップ状態又はスタンバイ状態に切り換えるためである。また、ある程度以上の速度で走行していると、舵角が中点付近にあれば、ほぼ直進走行中で、非操舵状態と判断できるからである。
【0015】
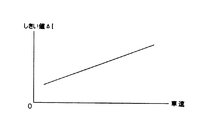
請求項2記載のパワーステアリング装置によれば、前記制御手段は、前記電流のしきい値ΔIを車両の速度に応じて変化する値として求める手段をさらに備えている。図1は、電流のしきい値ΔIと車速との関係を示したグラフである。車速が小さいほど電流のしきい値ΔIが低くなり、車速が大きいほど電流のしきい値ΔIは高くなっているので、図6に示したグラフと合わせてみると、アシスト状態からストップ状態もしくはスタンバイ状態に切り換えるハンドルの舵角位置は、一定に近づくのが判る。したがって、車速の違いにかかわらず、ステアリング操作フィーリングを一定にすることができる。
【0016】
このパワーステアリング装置によれば、前記舵角のしきい値Δθを車両の速度に応じて変化する値として求めるとともに、電流のしきい値ΔIを車両の速度に応じて変化する値として求める。したがって、図2(a) (b) を参照すれば、前記(1)式で特定される範囲A−Aと、前記(2)式で特定される範囲B−Bが、ともに車速に応じて変動することになる。
【0017】
以上の制御手段は、第1状態を第2状態に切り換える場合に、当該切り換えの条件が一定時間にわたって継続していることを条件とするタイマー手段をさらに有することが好ましい(請求項3)。
【0018】
この構成であれば、不整地走行などにおいて、当該切り換えが不用意に行われるのを防止することができる。
【0019】
【発明の実施の形態】
以下、本発明の実施の形態を、添付図面を参照しながら詳細に説明する。
【0020】
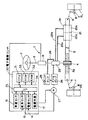
図4は、パワーステアリング装置の基本的な構成を示すブロック図である。
【0021】
ステアリング機構1は、ドライバによって操作されるステアリングホイール2と、このステアリングホイール2に連結されたステアリング軸3と、ステアリング軸3の先端部に設けられたピニオンギア4と、このピニオンギア4にかみ合うラックギア部5aを有し、車両の左右方向に延びたラック軸5を有している。
【0022】
ラック軸5の両端にはタイロッド6がそれぞれ結合されており、このタイロッド6は、それぞれ、操舵輪であるフロント左右輪FL,FRを支持するナックルアーム7に結合されている。ナックルアーム7は、キングピン8を中心として回転自在である。
【0023】
以上の構成において、ステアリングホイール2の操作によりステアリング軸3が回転すると、この回転がピニオンギア4及びラック軸5によって車両の左右方向に沿う直線運動に変換され、これによって、フロント左右輪FL,FRの操舵が行われる。
【0024】
ステアリング軸3の途中には、ステアリングホイール2に加えられた操舵トルクの方向及び大きさに応じてねじれを生じるトーションバー9と、このトーションバー9のねじれの方向及び大きさに応じて開度が変化する油圧制御弁23が設けられている。この油圧制御弁23は、ステアリング機構1に操舵補助力を与えるパワーシリンダ20に接続されている。パワーシリンダ20は、ラック軸5に一体的に設けられたピストン21と、このピストン21によって区画された一対のシリンダ室20a,20bとを有しており、シリンダ室20a,20bは、それぞれオイル供給/帰還路22a,22bを介して油圧制御弁23に接続されている。
【0025】
油圧制御弁23は、さらに、リザーバタンク25及びオイルポンプ26を通るオイル循環路24にも入っている。オイルポンプ26は、電動モータ27によって駆動され、リザーバタンク25に溜められている作動油を汲み出して油圧制御弁23に供給する。余剰の作動油は、油圧制御弁23からオイル循環路24を通ってリザーバタンク25に戻される。
【0026】
油圧制御弁23は、トーションバー9に一方向のねじれが加わった場合には、オイル供給/帰還路22a,22bのうち一方を介してパワーシリンダ20のシリンダ室20a,20bのうち一方に作動油を供給する。また、トーションバー9に他方方向のねじれが加わった場合には、オイル供給/帰還路22a,22bのうち他方を介してパワーシリンダ20のシリンダ室20a,20bのうち他方に作動油を供給する。トーションバー9にねじれがほとんど加わっていない場合には、油圧制御弁23は、いわば平衡状態になり、作動油はパワーシリンダ20に供給されることなく、オイル循環路24を循環する。
【0027】
パワーシリンダ20のいずれかのシリンダ室に作動油が供給されると、ピストン21が車幅方向に沿って移動する。これにより、ラック軸5に操舵補助力が作用することになる(パワーアシスト)。なお、油圧制御弁に関連する動作については、特開昭59-118577号公報などを参照。操舵補助力の大きさは、オイルポンプ26を作動させる電動モータ27への印加電圧を制御することによって調整する。
【0028】
電動モータ27は、電子制御ユニット30によって回転制御される。電子制御ユニット30は、CPU31、CPU31のワークエリアなどを提供するRAM32、及びCPU31の動作プログラム、車速の関数としての電流のしきい値ΔI、車速の関数としての舵角のしきい値Δθなどを記憶したROM33と、これらを相互接続するバス34と、入出力部35と、この入出力部35に接続され、電動モータ27に流れる電流を検出する電流センサ14と、電動モータ27を駆動する駆動回路17とを有している。
【0029】
また、電子制御ユニット30には、舵角センサ15と、車速センサ16とが接続されている。
【0030】
車速センサ16は、例えば車輪の回転数を検出する車輪速センサなどが使用されるが、車両にABS(アンチロックブレーキシステム)が搭載されていれば、ABSユニットの車速センサから車速信号を取り込むようにしてもよい。
【0031】
舵角センサ15は、ステアリングホイールに関連して設けられており、イグニッションキースイッチが導通されてエンジンが始動したときのステアリングホイール2の舵角を初期値0として、この初期値からの相対舵角を検出する。
【0032】
本発明の実施形態においては、非操舵時において電動モータ27を駆動しないストップアンドゴー制御を採用する。しかし、ステアリング操作の引っかかり感をなくし、電動モータ27の起動をスムーズにするため、非操舵時においても、電動モータ27を低電圧で駆動するスタンバイ制御を行っている場合にも、本発明の適用が可能であることはいうまでもない。
【0033】
電子制御ユニット30は、操舵時、電動モータ27にパワーアシストに十分な電圧V1 を印加しており、後述する条件下で電動モータ27を停止する。
【0034】
電動モータの状態を切り換える条件をフローチャート(図5)を用いて説明する。
【0035】
イグニションスイッチオンなどにより、電子制御ユニット30が立ち上げられると、CPU31は、舵角センサ15から出力される舵角データに基づいて、舵角θ及びその変化率dθ/dtを求める(ステップS1)。
【0036】
そして、電動モータ27が駆動中であるかどうかを判断する(ステップS2)。
【0037】
駆動中でなければ、舵角の変化率dθ/dtの絶対値としきい値a(例えばa=5degree/sec)との比較に基づいて電動モータを起動するかどうかを判断する(ステップS3,S4)。なお、電動モータの起動条件は、舵角の変化率判定に限られるものでなく、他の公知条件を当てはめることもできる。
【0038】
電動モータが駆動中であれば、CPU31は、舵角の変化率dθ/dtの絶対値が所定のしきい値b以下であるかどうかを判断する(ステップS5)。このしきい値bは、前記しきい値aと同程度の値であり、好ましくは、b>aにとられる(例えばb=8degree/sec)。b>aとするのは、操舵が開始されたときは操舵補助力を速やかに発生させ、操舵完了時には操舵補助を速やかに停止させるためである。
【0039】
舵角の変化率dθ/dtの絶対値がしきい値b以下であれば、ステップS6に移行し、電流センサ14の出力から電流値Iを読み出し(ステップS6)、この読み出された電流値Iが、電流のしきい値ΔI以内にあるかどうかを判定する(ステップS7)。
【0040】
I<ΔI
この電流のしきい値ΔIは、操舵補助を不要とする電動モータ電流の範囲を確定するものである。本発明の実施形態においては、電流のしきい値ΔIは、車速センサ16の出力から読み出された車速の関数となっているところに特徴があり、当該関数値がROM33に格納されている。
【0041】
なお、スタンバイ制御を行っている場合は、無負荷電流値I0を求め、電流値Iが、
I0<I<I0+ΔI
を満たしているかどうかで判断する。なお無負荷電流値I0の値は作動油の温度等によって異なるので、例えば、サンプリングした電流値Iのうち最頻出電流値もしくは最小値を求めることによって知ることができる。
【0042】
電流値Iが、電流のしきい値ΔIに入っていれば(ステップS7のYES)、舵角θの絶対値が舵角のしきい値Δθ以内に入っているかどうかを調べる(ステップS8)。この舵角のしきい値Δθも、操舵補助を不要とする舵角範囲を確定するものである。なお、舵角中点の検出は、舵角センサ15から出力される舵角データをサンプリングし、最頻出舵角を求めることにより可能となる。
【0043】
本発明の実施形態においては、舵角のしきい値Δθは、車速センサ16の出力から読み出された車速の関数となっていて、当該関数値がROM33に格納されている。
【0044】
舵角θの絶対値が、舵角のしきい値Δθ以内に入っていれば(ステップS8のYES)、以上に説明したステップS5,S7,S8を満たす状態が一定時間(例えば1〜3秒)継続したかどうかを判断する(ステップS9)。この判断の結果が肯定ならば、ステアリングホイールの操舵がないと判断できるから、CPU31は、電動モータ27を停止させる(ステップS10)。前記ステップS5,S7,S8,S9の判断のいずれかで、否定があれば、処理は元に戻る。
【0045】
以上の本発明の実施の形態では、電流のしきい値ΔI、舵角のしきい値Δθがともに車速の関数として、ROM33に記憶されているものであった。しかし、本発明の実施形態としては、これに限らず、電流のしきい値ΔI、舵角のしきい値Δθの少なくとも1つが車速の関数として記憶されているものであってもよい。さらに、電流のしきい値ΔI、舵角のしきい値Δθを車速に基づいて演算により求めることとしてもよい。
【0047】
【発明の効果】
以上のように本発明のパワーステアリング装置によれば、車速に応じてアシスト状態からストップ状態もしくはスタンバイ状態に切り換えるハンドルの舵角位置のしきい値を選ぶことができるので、車速の違いにかかわらず、ステアリング操作フィーリングを一定にすることができる。
【0048】
また、請求項2記載の本発明のパワーステアリング装置によれば、車速に応じてアシスト状態からストップ状態もしくはスタンバイ状態に切り換える電動モータ電流のしきい値を選ぶことができるので、車速の大小にかかわらず、アシスト状態からストップ状態もしくはスタンバイ状態に切り換えるハンドルの舵角位置を一定に近づけることができる。
【0049】
請求項3記載の本発明のパワーステアリング装置によれば、アシスト状態からストップ状態もしくはスタンバイ状態への切り換えが安定して行える。
【図面の簡単な説明】
【図1】電流のしきい値ΔIと車速との関係を示したグラフである。
【図2】舵角θの左右しきい値±Δθの範囲、及び電動モータ電流の電流のしきい値ΔIの範囲を示すグラフである。(a) は、I0<I<I0+ΔIの場合を示し、(b) は 0≦I<ΔIの場合を示す。
【図3】舵角のしきい値Δθと車速との関係を示したグラフである。
【図4】パワーステアリング装置の基本的な構成を示すブロック図である。
【図5】アシスト状態から電動モータ停止状態に切り換える条件を説明するためのフローチャートである。
【図6】舵角位置に対する電動モータ電流曲線を示すグラフであり、車速がパラメータとなっている。
【符号の説明】
14 電流センサ
15 舵角センサ
16 車速センサ
27 電動モータ
30 電子制御ユニット
31 CPU
32 RAM
33 ROM
Claims (3)
- 電動モータにより駆動されるポンプの発生油圧によって操舵補助力を発生させるパワーステアリング装置において、
車両の速度を検出する車速センサと、電動モータに流れる電流を検出する電流センサと、
前記電動モータに操舵時に第1の電圧V1を印加する第1状態と、非操舵時に電動モータに電圧を印加しないか、もしくは前記第1の電圧よりも低い第2の電圧V2を印加する第2状態とを切り換えることのできる制御手段とを有し、
前記制御手段は、(a) 第1状態で、舵角の変化率dθ/dtが所定値以下であるかどうか、(b) 第1状態で、電流センサから検出される電流Iが、無負荷電流値I0から無負荷電流値I0に電流のしきい値ΔIを加えた範囲内にあるか、もしくは電流のしきい値ΔI以下であるかどうか、(c) 第1状態で、舵角θが中点から左右しきい値±Δθの範囲内にあるかどうかを判定する手段と、前記舵角のしきい値Δθを車両の速度に応じて変化する値として求める手段とを備え、
前記しきい値Δθは、車速が大きくなれば徐々に減少し、車速が小さいほど増加し、ある一定の車速よりも小さくなると、急激に増加する連続的特性を有するものであり、
前記(a) の条件が満たされることと、前記(b) の条件が満たされることと、前記(c) の条件が満たされることの全部に基づいて、第1状態を第2状態に切り換えることを特徴とするパワーステアリング装置。 - 前記制御手段は、前記電流のしきい値ΔIを車両の速度に応じて変化する値として求める手段をさらに備えていることを特徴とする請求項1記載のパワーステアリング装置。
- 前記制御手段は、第1状態を第2状態に切り換える場合に、当該切り換えの条件が一定時間にわたって継続していることを条件とするタイマー手段をさらに有する請求項1又は2記載のパワーステアリング装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP19761498A JP3668614B2 (ja) | 1998-07-13 | 1998-07-13 | パワーステアリング装置 |
| EP99113228A EP0972695B1 (en) | 1998-07-13 | 1999-07-08 | Power steering apparatus |
| DE69908865T DE69908865T2 (de) | 1998-07-13 | 1999-07-08 | Servolenkung |
| ES99113228T ES2196680T3 (es) | 1998-07-13 | 1999-07-08 | Aparato de direccion asistida. |
| US09/350,985 US6064166A (en) | 1998-07-13 | 1999-07-12 | Power steering apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP19761498A JP3668614B2 (ja) | 1998-07-13 | 1998-07-13 | パワーステアリング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000025632A JP2000025632A (ja) | 2000-01-25 |
| JP3668614B2 true JP3668614B2 (ja) | 2005-07-06 |
Family
ID=16377411
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP19761498A Expired - Fee Related JP3668614B2 (ja) | 1998-07-13 | 1998-07-13 | パワーステアリング装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6064166A (ja) |
| EP (1) | EP0972695B1 (ja) |
| JP (1) | JP3668614B2 (ja) |
| DE (1) | DE69908865T2 (ja) |
| ES (1) | ES2196680T3 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3673377B2 (ja) * | 1997-09-26 | 2005-07-20 | 光洋精工株式会社 | パワーステアリング装置 |
| JP3621335B2 (ja) | 2000-09-05 | 2005-02-16 | アルプス電気株式会社 | 回転角速度検出装置及び回転角速度検出方法、並びにこの装置を使用した自動車 |
| DE10325848A1 (de) * | 2003-06-06 | 2005-01-05 | Trw Fahrwerksysteme Gmbh & Co. Kg | Verfahren zur Steuerung eines elektrischen Pumpenantriebsmotors einer Servolenkvorrichtung |
| US6941207B2 (en) * | 2003-10-10 | 2005-09-06 | Matsushita Electric Industrial Co., Ltd. | Steering angular velocity detecting device |
| JP4368742B2 (ja) * | 2004-06-08 | 2009-11-18 | 株式会社日立製作所 | パワーステアリング装置 |
| EP1752358A1 (de) * | 2005-08-10 | 2007-02-14 | Ford Global Technologies, LLC | Elektro-hydraulische Servolenkung und Verfahren zur Steuerung ihrer Pumpendrehzahl |
| JP4796869B2 (ja) * | 2006-03-03 | 2011-10-19 | 日立オートモティブシステムズ株式会社 | パワーステアリング装置 |
| JP4984598B2 (ja) * | 2006-03-30 | 2012-07-25 | 日本精工株式会社 | 電動パワーステアリング装置 |
| FR2935670B1 (fr) * | 2008-09-11 | 2011-08-05 | Jtekt Hpi | Procede de strategie de reduction de la consommation d'energie d'un vehicule automobile. |
| US9637255B2 (en) * | 2012-12-26 | 2017-05-02 | The Raymond Corporation | Palletized load wrapping and transporting vehicle and method |
| CN104724165B (zh) * | 2013-12-20 | 2017-01-25 | 北汽福田汽车股份有限公司 | 车辆转向装置及其控制方法、汽车 |
| JP7256062B2 (ja) * | 2019-04-15 | 2023-04-11 | トヨタ自動車株式会社 | ステアリングシステム |
| CN112238892B (zh) * | 2019-07-19 | 2021-12-10 | 郑州宇通客车股份有限公司 | 一种基于eps和ehps的转向系统及其控制方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5722967A (en) * | 1980-07-16 | 1982-02-06 | Tokai T R W Kk | Power steering system |
| JPS57198169A (en) * | 1981-05-29 | 1982-12-04 | Tokai T R W Kk | Motor-driven oil pressure power steering unit |
| US4518055A (en) * | 1982-04-08 | 1985-05-21 | Nissan Motor Company, Limited | Pump-drive device of power-assisted steering system |
| JPS59118577A (ja) | 1982-12-27 | 1984-07-09 | Koyo Jidoki Kk | パワーステアリング装置の回転制御弁のスプール弁 |
| JPS59149870A (ja) * | 1983-02-14 | 1984-08-27 | Jidosha Kiki Co Ltd | 動力舵取装置 |
| DE3920862A1 (de) * | 1989-06-26 | 1991-01-03 | Teves Gmbh Alfred | Hilfskraftlenkung fuer kraftfahrzeuge |
| JPH0829716B2 (ja) | 1991-09-17 | 1996-03-27 | 本田技研工業株式会社 | パワーステアリングシステム制御装置 |
| DE4241785B4 (de) * | 1992-12-11 | 2009-03-12 | Continental Teves Ag & Co. Ohg | Hydraulische Hilfskraftlenkanlage |
| DE4335390B4 (de) * | 1993-10-16 | 2007-04-12 | Trw Fahrwerksysteme Gmbh & Co Kg | Servolenkvorrichtung |
| JP3479730B2 (ja) * | 1994-10-20 | 2003-12-15 | 光洋精工株式会社 | 電動パワーステアリング装置 |
| JP3506810B2 (ja) * | 1995-06-19 | 2004-03-15 | ユニシア ジェーケーシー ステアリングシステム株式会社 | 電動ポンプ式動力舵取装置 |
| JP3547558B2 (ja) * | 1995-10-25 | 2004-07-28 | 光洋精工株式会社 | パワーステアリング装置 |
-
1998
- 1998-07-13 JP JP19761498A patent/JP3668614B2/ja not_active Expired - Fee Related
-
1999
- 1999-07-08 DE DE69908865T patent/DE69908865T2/de not_active Expired - Lifetime
- 1999-07-08 EP EP99113228A patent/EP0972695B1/en not_active Expired - Lifetime
- 1999-07-08 ES ES99113228T patent/ES2196680T3/es not_active Expired - Lifetime
- 1999-07-12 US US09/350,985 patent/US6064166A/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| US6064166A (en) | 2000-05-16 |
| JP2000025632A (ja) | 2000-01-25 |
| EP0972695A3 (en) | 2001-06-27 |
| ES2196680T3 (es) | 2003-12-16 |
| EP0972695A2 (en) | 2000-01-19 |
| DE69908865D1 (de) | 2003-07-24 |
| DE69908865T2 (de) | 2004-05-06 |
| EP0972695B1 (en) | 2003-06-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6216814B1 (en) | Power steering apparatus | |
| JP3546062B2 (ja) | パワーステアリング装置 | |
| JP3582839B2 (ja) | パワーステアリング装置 | |
| JP3668614B2 (ja) | パワーステアリング装置 | |
| JPWO1999008921A1 (ja) | パワーステアリング装置 | |
| JPWO1999008922A1 (ja) | パワーステアリング装置 | |
| JP3648392B2 (ja) | パワーステアリング装置 | |
| JP3673377B2 (ja) | パワーステアリング装置 | |
| US6250418B1 (en) | Power steering apparatus | |
| EP0987163B1 (en) | Power steering apparatus | |
| EP1043211B1 (en) | Power steering apparatus | |
| EP1900604B1 (en) | Power steering system | |
| JP2972283B2 (ja) | 動力舵取装置の制御装置 | |
| JP2000159137A (ja) | パワーステアリング装置 | |
| JP3589810B2 (ja) | パワーステアリング装置 | |
| CA2497729C (en) | Power steering apparatus | |
| JP2002120741A (ja) | パワーステアリング装置 | |
| JPH11334631A (ja) | パワーステアリング装置 | |
| JP2001163239A (ja) | パワーステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20041201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050106 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050302 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050322 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050411 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080415 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090415 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090415 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100415 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100415 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110415 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120415 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130415 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140415 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |