JP3585130B2 - リニアパルスモータ - Google Patents
リニアパルスモータ Download PDFInfo
- Publication number
- JP3585130B2 JP3585130B2 JP23836293A JP23836293A JP3585130B2 JP 3585130 B2 JP3585130 B2 JP 3585130B2 JP 23836293 A JP23836293 A JP 23836293A JP 23836293 A JP23836293 A JP 23836293A JP 3585130 B2 JP3585130 B2 JP 3585130B2
- Authority
- JP
- Japan
- Prior art keywords
- stator
- mover
- teeth
- axial direction
- salient poles
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/03—Synchronous motors; Motors moving step by step; Reluctance motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/18—Means for mounting or fastening magnetic stationary parts on to, or to, the stator structures
- H02K1/185—Means for mounting or fastening magnetic stationary parts on to, or to, the stator structures to outer stators
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Electromagnetism (AREA)
- Linear Motors (AREA)
Description
【産業上の利用分野】
本発明は、VR(可変レラクタンス)形のリニアパルスモータに関する。
【0002】
【従来の技術】
従来、この種のモータとしては、特公平5−19282号公報(発明の名称:リニアアクチュエータ)にシリンダ状のVR形リニアパルスモータが開示されている。前記公報によれば、このリニアパルスモータは、巻線が巻回された固定子と、該固定子に対して軸方向に移動自在に支持された電機子とから成る。該固定子は、複数個の磁極を有するセグメント(鉄板)とスペーサとを交互に積層したもので、該磁極は前記巻線への電流により交互にN極とS極に磁化されている。前記電機子は棒状の非磁性の支持チューブ上に取付けられたリングで、前記巻線に選択的に流される電流によって発生する前記固定子と電機子とを通る磁束により、軸方向に駆動制御される。
【0003】
また、米国特許第5,093,596号公報(発明の名称:結合形リニア・ロータリ直接駆動ステップモータ(COMBINED LINEAR−ROTARY DIRECT DRIVE STEP MOTOR))には、シリンダ状の3相VR形リニアパルスモータが開示されている。前記公報によれば、このリニアパルスモータは、円筒状の可変レラクタンス形リニアステップモータ部分と、ハイブリッド永久磁石形ロータリステップモータ部分とを備え、それぞれ出力軸を共通にして、ひとつのハウジング内に収容したものである。
【0004】
【発明が解決しようとする課題】
しかしながら、両者のうち、前者のリニアパルスモータは、各相を構成する固定子は軸方向に並べられており、多相化した場合、モータは軸方向に長くなるという問題点があった。
【0005】
他方、後者のリニアパルスモータは、固定子が固定子鉄板とスペーサ鉄板とを交互に積層した構成になっており、固定子コアの製作にあたっては、2種類の鉄板を交互に積層しなければならず、また固定子鉄板は各突極の先端部をひとつおきに曲げ加工しなければならず、容易に固定子コアを製作することができないという問題点があった。
【0006】
本発明はかかる点に鑑みなされたもので、その目的は前記問題点を解消し、その内周面に軸方向に複数個の固定子小歯を形成しながら、固定子コアの製作が容易で、しかも各相巻線を固定子コアの内周方向に配置でき、多相化しても軸方向に長くならないVR形リニアパルスモータを提供することにある。
【0007】
【課題を解決するための手段】
前記目的を達成するための本発明の構成は、内側に向って放射状に等ピッチ角度で配設された複数個の突極を有するとともに、該突極の内周面に軸方向に複数個の固定子小歯が形成された固定子コアを有する固定子と、該固定子内に軸方向に移動自在に支持されるとともに、外周面に前記固定子小歯に対向して、軸方向に等ピッチで複数個の移動子小歯が形成された移動子コアを有する移動子とを備えてなるリニアパルスモータにおいて、次のとおりである。
【0008】
(1)前記固定子コアは、該固定子コアの固定子鉄板を所定角度で順次回転積層して形成されるとともに、kを1以上の整数とするとき、前記固定子鉄板は3k個の突極を有し、前記移動子と対向する前記突極の先端部が、前記移動子側からみて、内半径が小さい突極が1個、内半径の大きい突極が2個の順に並んで1組を構成し、その組がk個存在するように構成され、前記回転積層する所定角度を(120/k)度にすることにより、前記固定子小歯は前記固定子鉄板の厚さがt 0 のとき、歯厚t 0 ,歯ピッチ3t 0 で、ステップごとの基本移動量がt 0 であるリニアパルスモータである。
【0009】
(2)前記固定子コアは、該固定子コアの固定子鉄板を所定角度で順次回転積層して形成されるとともに、該固定子鉄板は6個の突極を有するとともに、前記移動子と対向する前記突極の先端部が、前記移動子側からみて、内半径が小さい突極が2個、内半径の大きい突極が4個の順に並んで形成するように構成され、前記回転積層する所定角度を120度にすることにより、前記固定子小歯は前記固定子鉄板の厚さがt 0 のとき、歯厚t 0 ,歯ピッチ3t 0 、または所定角度を60度にすることにより、歯厚2t 0 ,歯ピッチ6t 0 で、ステップごとの基本移動量がt 0 であるリニアパルスモータである。
【0010】
(3)前記固定子コアは、該固定子コアの固定子鉄板を所定角度で順次回転積層して形成されるとともに、mを相数とするとき、mは4以上の値であって、該固定子鉄板はm個の突極を有するとともに、前記移動子と対向する前記突極の先端部が、前記移動子側からみて、内半径が小さい突極が2個、内半径の大きい突極が(m−2)個の順に並んで形成するように構成され、前記回転積層する所定角度を(360/m)度にすることにより、前記固定子小歯は前記固定子鉄板の厚さがt 0 のとき、歯厚が2t 0 ,歯ピッチがmt 0 で、ステップごとの基本移動量が前記歯ピッチの1/mであるリニアパルスモータである。
【0011】
【作用】
前記のように構成されたリニアパルスモータは、一種類の固定子鉄板を所定の角度で順次回転積層するという、回転型ステッピングモータで使われているコア製作技術が使用できるため、その内周面に軸方向に複数個の固定子小歯を形成しながら、固定子コアを容易に製作できる。
【0012】
【実施例】
以下、図面に基づいて本発明の好適な実施例を例示的に詳しく説明する。
図1は、本発明のリニアパルスモータの一実施例を示す縦断面図、図2は、図1のII−II線による横断面図である。
本実施例は、整数kおよび相数mの各数値が、k=2,m=3とした場合を示し、従って、固定子突極の数はk・m=6個である。
【0013】
図1および図2において、固定子1の固定子コア10に配設された6個の突極11,12,13,……16には、その内周面に軸方向に複数個の固定子小歯17(歯先部17aと歯底部17b)が配設されている。また、これら6個の突極11,12,13,……16のそれぞれに、固定子巻線W1,W2,W3,……W6が各別に巻回されている。該固定子コア10は、その両端部をエンドブラケット18と19により、図示しないネジ等でネジ止めすることにより支持される。
【0014】
一方、固定子1内にある移動子2は、前記エンドブラケット18と19により、軸受20a,20bを介して軸方向に移動自在に支持される。そして、該移動子2には、軸21上に磁極コア22が配設されており、また該磁極コア22の外周面には、軸方向に複数個の移動子小歯24(歯先部24aと歯底部24b)が配設されている。
【0015】
前記磁極コア22は、該歯先部24aを形成する外径の大きい移動子鉄板25aが1枚,歯底部24bを形成する外径の小さい移動子鉄板25bが2枚の順で、積層されて形成されている。なお、該磁極コア22は前記移動子鉄板25a,25bの積層の代わりに、鉄系材などの磁性材から切削加工等によっても、勿論製作可能である。
【0016】
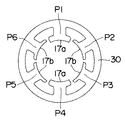
図3は、固定子コア10を形成している固定子鉄板30の一例を示したものである。図3において、固定子鉄板30の突極P1とP4とは、その先端部が内半径の小さい突極(各1個)であり、固定子小歯17の歯先部17aを形成する突極である。また、突極P2,P3とP5,P6とは、その先端部が内半径の大きい突極(各、m−1=3−1=2個)であり、固定子小歯17の歯底部17bを形成する突極である。図3は、整数k=2,相数m=3の場合を示している。すなわち、これらの突極P1,P2,P3の組と、突極P4,P5,P6の組とが、固定子コア10の円周方向に順に並んで2組存在することになる。
【0017】
図4は、該固定子鉄板30を角度60(360/k・m=360/6)度ずつ回転しながら積層したときに形成される突極11,12,13,……16の固定子小歯17の様子を移動子2側からみたものである。ハッチングのある部分が歯先部17aを示し、ハッチングのない部分が歯底部17bを示す。固定子鉄板30の厚さをt0 とすると、回転積層することにより、各突極11,12,13……16には歯ピッチがm・t0 ,すなわち3t0 ,歯厚がt0 の固定子小歯17が形成される。しかも突極11を基準にしたとき、突極12の小歯17のずれは歯ピッチの1/3,突極13の小歯17のずれは歯ピッチの2/3,突極14の小歯17のずれは歯ピッチの3/3,すなわち0,突極15の小歯17のずれは歯ピッチの1/3,突極16の小歯17のずれは歯ピッチの2/3である。
【0018】
したがって、図5のように巻線W1とW4を結線してA相、巻線W2とW5を結線してB相、巻線W3とW6を結線してC相とすることにより3相のVR形リニアパルスモータを構成することができる。このときのステップごとの基本移動量は歯ピッチの1/mすなわち、t0 となる。なお、図5の各巻線W1,W2,W3,……6に付された●は巻線の向きを表しており、例えば、コモンからA相に向かって電流を流すと、突極11はN極に、突極14はS極に励磁されることを意味している。
【0019】
図6は、前記固定子コア10を形成している前記固定子鉄板30の他の例の固定子鉄板31を示したもので、相数mは前記同様にm=3の場合を示す。
【0020】
図6において、前記固定子鉄板31は、2m=6個の突極P11,P12,P13,……P16を有するとともに、突極P11,P12は、その先端部が内半径の小さい2個の突極であり、固定子小歯17の歯先部17aを形成する突極である。またP13,P14,P15,P16は、その先端部が内半径の大きい(2m−2)、すなわち4個の突極であり、固定子小歯17の歯底部17bを形成する突極である。
【0021】
図7は、該固定子鉄板31を角度120(360/m=360/3)度ずつ回転しながら積層したときに形成される突極11,12,13,……16の固定子小歯17の様子を移動子側からみたものである。図4の場合と同様に、ハッチングのある部分が歯先部17aを示し、ハッチングのない部分が歯底部17bを示す。固定子鉄板31の厚さをt0 とすると、回転積層することにより各突極11,12,13,……16には歯ピッチmt0 ,すなわち3t0 ,歯厚がt0 の固定子小歯17が形成される。しかも突極11を基準としたとき、突極12の小歯のずれはゼロ、突極13と突極14の小歯のずれは歯ピッチの1/3、突極15と16の小歯のずれは歯ピッチの2/3である。
【0022】
したがって、図8のように隣合う各2個の巻線W1,W2;W3,W4;W5,W6を互いに異極性に接続して、それぞれA相,B相,C相とすることにより3相のVR形リニアパルスモータを構成することができる。
【0023】
次いで、前記固定子コア10が図6の前記固定子鉄板31により形成されるときで、相数mがm=6の場合を示す。この場合、突極の数はm,すなわち6個である。
【0024】
図9は、該固定子鉄板31を角度60(360/m=360/6)度ずつ回転しながら積層したときに形成される突極11,12,13,……16の固定子小歯17の様子を移動子側からみたものである。図4の場合と同様に、ハッチングのある部分が歯先部17aを示し、ハッチングのない部分が歯底部17bを示す。固定子鉄板31の厚さをt0 とすると、回転積層することにより各突極11,12,13,……16には歯ピッチmt0 ,すなわち6t0 ,歯厚が2t0 の固定子小歯17が形成される。しかも突極11を基準としたとき、突極12の小歯のずれは歯ピッチの1/6,突極13の小歯のずれは歯ピッチの2/6,突極14の小歯のずれは歯ピッチの3/6,突極15の小歯のずれは歯ピッチの4/6,突極16の小歯のずれは歯ピッチの5/6である。
【0025】
したがって、図10のように、各巻線W1,W2,W3,……W6を結線することにより、6相のVR形リニアパルスモータを構成することができる。
【0026】
また、図11のように、巻線W1,W2,W3,……W6を結線することにより、3相のVR形リニアパルスモータに構成することも可能である。この場合、相数mはm=3となり、前記固定子鉄板31は角度60(180/m=180/3)度ずつ回転しながら積層され、前記6相のVR形リニアパルスモータの場合と同一角度になる。
【0027】
なお、本発明の技術は前記実施例における技術に限定されるものではなく、同様な機能を果す他の態様の手段によってもよく、また本発明の技術は前記構成の範囲内において種々の変更,付加が可能である。
【0028】
【発明の効果】
以上の説明から明らかなように、本発明のリニアパルスモータによれば、前記固定子コアは、その内周面に軸方向に複数個の固定子小歯を形成しながら、該固定子コアの固定子鉄板を所定の角度で順次回転積層することにより形成できる。したがって回転型ステッピングモータで使われているコア製造技術が使用できるため、固定子コアを容易にしかも低コストで製作することができる。また、各相巻線は前記固定子コアの円周方向に配置されるため、多相化しても軸方向に長くならないVR形リニアパルスモータを提供することができる。
【図面の簡単な説明】
【図1】本発明のリニアパルスモータの一実施例を示す縦断面図である。
【図2】図1のII−II線による横断面図である。
【図3】固定子コアを形成する固定子鉄板の平面図である。
【図4】図3の固定子鉄板を所定角回転積層したときに形成される固定子小歯部を移動子側から見た展開図である。
【図5】固定子巻線の結線図である。
【図6】固定子コアを形成する他の固定子鉄板の平面図である。
【図7】図6の固定子鉄板を120度回転積層したときに形成される固定子小歯部を移動子側から見た展開図である。
【図8】図7における3相リニアパルスモータの固定子巻線の結線図である。
【図9】図6の固定子鉄板を60度回転積層したときに形成される固定子小歯部を移動子側から見た展開図である。
【図10】図9における6相リニアパルスモータの固定子巻線の結線図である。
【図11】図9における3相リニアパルスモータの固定子巻線の結線図である。
【符号の説明】
1 固定子
2 移動子
10 固定子コア
11,12,13,……16 突極
17 固定子小歯
17a 歯先部
17b 歯底部
24 移動子小歯
24a 歯先部
24b 歯底部
30,31 固定子鉄板
k 整数
m 相数
P1,P2,P3,……P6,P11,P12,P13,……P16 突極
t0 固定子鉄板の厚さ
W1,W2,W3,……W6 巻線
Claims (3)
- 内側に向って放射状に等ピッチ角度で配設された複数個の突極を有するとともに、該突極の内周面に軸方向に複数個の固定子小歯が形成された固定子コアを有する固定子と、該固定子内に軸方向に移動自在に支持されるとともに、外周面に前記固定子小歯に対向して、軸方向に等ピッチで複数個の移動子小歯が形成された移動子コアを有する移動子とを備えてなるリニアパルスモータにおいて、
前記固定子コアは、該固定子コアの固定子鉄板を所定角度で順次回転積層して形成されるとともに、kを1以上の整数とするとき、前記固定子鉄板は3k個の突極を有するとともに、前記移動子と対向する前記突極の先端部が、前記移動子側からみて、内半径が小さい突極が1個、内半径の大きい突極が2個の順に並んで1組を構成し、その組がk個存在するように構成され、前記回転積層する所定角度を(120/k)度にすることにより、前記固定子小歯は前記固定子鉄板の厚さがt 0 のとき、歯厚t 0 ,歯ピッチ3t 0 で、ステップごとの基本移動量がt 0 であることを特徴とするリニアパルスモータ。 - 内側に向って放射状に等ピッチ角度で配設された複数個の突極を有するとともに、該突極の内周面に軸方向に複数個の固定子小歯が形成された固定子コアを有する固定子と、該固定子内に軸方向に移動自在に支持されるとともに、外周面に前記固定子小歯に対向して、軸方向に等ピッチで複数個の移動子小歯が形成された移動子コアを有する移動子とを備えてなるリニアパルスモータにおいて、
前記固定子コアは、該固定子コアの固定子鉄板を所定角度で順次回転積層して形成されるとともに、該固定子鉄板は6個の突極を有するとともに、前記移動子と対向する前記突極の先端部が、前記移動子側からみて、内半径が小さい突極が2個、内半径の大きい突極が4個の順に並んで形成するように構成され、前記回転積層する所定角度を120度にすることにより、前記固定子小歯は前記固定子鉄板の厚さがt 0 のとき、歯厚t 0 ,歯ピッチ3t 0 、または所定角度を60度にすることにより、歯厚2t 0 ,歯ピッチ6t 0 で、ステップごとの基本移動量がt 0 であることを特徴とするリニアパルスモータ。 - 内側に向って放射状に等ピッチ角度で配設された複数個の突極を有するとともに、該突極の内周面に軸方向に複数個の固定子小歯が形成された固定子コアを有する固定子と、該固定子内に軸方向に移動自在に支持されるとともに、外周面に前記固定子小歯に対向して、軸方向に等ピッチで複数個の移動子小歯が形成された移動子コアを有する移動子とを備えてなるリニアパルスモータにおいて、
前記固定子コアは、該固定子コアの固定子鉄板を所定角度で順次回転積層して形成されるとともに、mを相数とするとき、mは4以上の値であって、該固定子鉄板はm個の突極を有するとともに、前記移動子と対向する前記突極の先端部が、前記移動子側からみて、内半径が小さい突極が2個、内半径の大きい突極が(m−2)個の順に並んで形成するように構成され、前記回転積層する所定角度を(360/m)度にすることにより、前記固定子小歯は前記固定子鉄板の厚さがt 0 のとき、歯厚2t 0 ,歯ピッチmt 0 で、ステップごとの基本移動量が前記歯ピッチの1/mであることを特徴とするリニアパルスモータ。
Priority Applications (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP23836293A JP3585130B2 (ja) | 1993-09-24 | 1993-09-24 | リニアパルスモータ |
| TW083108418A TW268163B (ja) | 1993-09-24 | 1994-09-13 | |
| KR1019940023366A KR0144316B1 (ko) | 1993-09-24 | 1994-09-15 | 리니어 펄스 모터 |
| CA002132491A CA2132491C (en) | 1993-09-24 | 1994-09-20 | Linear pulse motor |
| US08/309,456 US5629572A (en) | 1993-09-24 | 1994-09-22 | Linear pulse motor |
| EP94115047A EP0645876B1 (en) | 1993-09-24 | 1994-09-23 | Linear pulse motor |
| DE69402797T DE69402797T2 (de) | 1993-09-24 | 1994-09-23 | Linearer Schrittmotor |
| CN94116445A CN1110024A (zh) | 1993-09-24 | 1994-09-23 | 线性脉冲马达 |
| US08/772,280 US5693989A (en) | 1993-09-24 | 1996-12-20 | Linear pulse motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP23836293A JP3585130B2 (ja) | 1993-09-24 | 1993-09-24 | リニアパルスモータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH0799769A JPH0799769A (ja) | 1995-04-11 |
| JP3585130B2 true JP3585130B2 (ja) | 2004-11-04 |
Family
ID=17029065
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP23836293A Expired - Fee Related JP3585130B2 (ja) | 1993-09-24 | 1993-09-24 | リニアパルスモータ |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US5629572A (ja) |
| EP (1) | EP0645876B1 (ja) |
| JP (1) | JP3585130B2 (ja) |
| KR (1) | KR0144316B1 (ja) |
| CN (1) | CN1110024A (ja) |
| CA (1) | CA2132491C (ja) |
| DE (1) | DE69402797T2 (ja) |
| TW (1) | TW268163B (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6153953A (en) * | 1997-08-05 | 2000-11-28 | Japan Servo Co., Ltd. | Multi-phase PM-type stepping motor |
| JP2000116172A (ja) * | 1998-09-29 | 2000-04-21 | Toshiba Tec Corp | 多相モータ |
| GB2360392A (en) * | 2000-03-13 | 2001-09-19 | Kenneth John Bower | Linear electrical actuator |
| NZ566067A (en) * | 2005-07-21 | 2009-11-27 | Cleveland Clinic Foundation | Medical oscillating compliance devices and uses thereof |
| CN1976186B (zh) * | 2006-12-13 | 2011-05-11 | 哈尔滨工业大学 | 横向磁通圆筒形直线磁阻电机 |
| DE102007000085A1 (de) * | 2007-02-13 | 2008-08-14 | Hilti Ag | Verfahren zur Steuerung eines Linearmotors zum Antrieb eines Schlagwerks |
| GB0719814D0 (en) * | 2007-10-05 | 2007-11-21 | Rolls Royce Plc | Flux-switching machine |
| WO2009058353A1 (en) * | 2007-11-02 | 2009-05-07 | The Cleveland Clinic Foundation | Device for increasing cerebral blood flow |
| US8193681B2 (en) * | 2007-11-26 | 2012-06-05 | Mitsui High-Tec, Inc. | Laminated stator core and method for manufacturing the same |
| CN101527472B (zh) * | 2008-03-05 | 2011-03-23 | 黄世章 | 一种由旋转磁场驱动的直线电机 |
| KR101486375B1 (ko) * | 2008-07-29 | 2015-01-26 | 엘지전자 주식회사 | 리니어 모터 |
| US8191857B2 (en) * | 2008-10-09 | 2012-06-05 | Parker-Hannifin Corporation | Linear motor valve |
| JP5386925B2 (ja) * | 2008-10-17 | 2014-01-15 | 株式会社安川電機 | 円筒形リニアモータ |
| CN102935799B (zh) * | 2011-12-11 | 2016-01-06 | 汤明德 | 一种利用轮胎转动自发电方法 |
| CN102570734B (zh) * | 2012-01-20 | 2013-09-25 | 上海理工大学 | 高起动推力径向磁场直线旋转电机定子双片叠压法 |
| DE202014104893U1 (de) | 2014-10-14 | 2014-10-29 | Hacksaw & Knife Manufactory Co., Ltd. | Handsäge |
| CN105656281B (zh) * | 2016-01-22 | 2017-12-01 | 山东理工大学 | 带励磁绕组的三相磁阻式圆筒直线电机 |
| CN105553221B (zh) * | 2016-01-22 | 2018-01-09 | 山东理工大学 | 一种各相圆周分布的筒式直线作动器 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3370191A (en) * | 1964-01-31 | 1968-02-20 | Ford Motor Co | Electrical machines and interconnections therefor |
| US4810914A (en) * | 1987-03-26 | 1989-03-07 | International Business Machines Corporation | Linear actuator with multiple closed loop flux paths essentially orthogonal to its axis |
| US4837467A (en) * | 1987-12-02 | 1989-06-06 | North American Philips Corporation | Linear motor with angularly indexed magnetic poles |
| US5093596A (en) * | 1990-10-24 | 1992-03-03 | Ibm Corporation | Combined linear-rotary direct drive step motor |
| JP3010800B2 (ja) * | 1991-07-16 | 2000-02-21 | 日本電気株式会社 | 液晶表示装置及び液晶表示パネル |
| JP3220535B2 (ja) * | 1992-12-14 | 2001-10-22 | オリエンタルモーター株式会社 | リニアパルスモータ |
-
1993
- 1993-09-24 JP JP23836293A patent/JP3585130B2/ja not_active Expired - Fee Related
-
1994
- 1994-09-13 TW TW083108418A patent/TW268163B/zh not_active IP Right Cessation
- 1994-09-15 KR KR1019940023366A patent/KR0144316B1/ko not_active IP Right Cessation
- 1994-09-20 CA CA002132491A patent/CA2132491C/en not_active Expired - Fee Related
- 1994-09-22 US US08/309,456 patent/US5629572A/en not_active Expired - Fee Related
- 1994-09-23 EP EP94115047A patent/EP0645876B1/en not_active Expired - Lifetime
- 1994-09-23 CN CN94116445A patent/CN1110024A/zh active Pending
- 1994-09-23 DE DE69402797T patent/DE69402797T2/de not_active Expired - Fee Related
-
1996
- 1996-12-20 US US08/772,280 patent/US5693989A/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE69402797D1 (de) | 1997-05-28 |
| DE69402797T2 (de) | 1997-08-07 |
| JPH0799769A (ja) | 1995-04-11 |
| EP0645876A1 (en) | 1995-03-29 |
| KR0144316B1 (ko) | 1998-10-01 |
| CA2132491C (en) | 1997-10-07 |
| EP0645876B1 (en) | 1997-04-23 |
| CA2132491A1 (en) | 1995-03-25 |
| TW268163B (ja) | 1996-01-11 |
| CN1110024A (zh) | 1995-10-11 |
| KR950010306A (ko) | 1995-04-28 |
| US5629572A (en) | 1997-05-13 |
| US5693989A (en) | 1997-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3585130B2 (ja) | リニアパルスモータ | |
| JP2652080B2 (ja) | ハイブリッド形ステッピングモータ | |
| JP3131403B2 (ja) | ステッピングモータ | |
| US4680494A (en) | Multiphase motor with facially magnetized rotor having N/2 pairs of poles per face | |
| US20180034332A1 (en) | Rotary electric machine | |
| JPH0614514A (ja) | 永久磁石式ステッピングモ−タ | |
| JPH11225466A (ja) | 多相アウター型pmステッピングモータ | |
| JP3220559B2 (ja) | リニアパルスモータ | |
| JP3220535B2 (ja) | リニアパルスモータ | |
| JPH0239180B2 (ja) | ||
| JP3220537B2 (ja) | リニアパルスモータ | |
| JP4172863B2 (ja) | 5相永久磁石型モータ | |
| JPH0799923B2 (ja) | ブラシレスモ−タの巻線方法 | |
| JPH08163857A (ja) | 回転形リニアパルスモータ | |
| JP3600654B2 (ja) | リニア・ロータリ複合型ステッピングモータ | |
| JP3357817B2 (ja) | 多相pm型ステッピングモータ | |
| JP3882949B2 (ja) | 環状コイル式永久磁石型回転電機 | |
| JP3178616B2 (ja) | アウターロータ型ステッピングモータ | |
| JPH07222414A (ja) | リニア・ロータリ複合型パルスモータ | |
| JP3713116B2 (ja) | 3相ハイブリッド型ステッピングモータ | |
| JP3207302B2 (ja) | リニアパルスモータ | |
| JP2835616B2 (ja) | 永久磁石形ステッピングモータ | |
| JP3594892B2 (ja) | ステッピングモータ | |
| JP3982873B2 (ja) | 3相ステッピングモータ | |
| JP2592316B2 (ja) | ハイブリッド形ステッピングモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040730 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20070813 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080813 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090813 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100813 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100813 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110813 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110813 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120813 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120813 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130813 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |