JP3583809B2 - 高圧型一軸偏心ねじポンプ装置 - Google Patents
高圧型一軸偏心ねじポンプ装置 Download PDFInfo
- Publication number
- JP3583809B2 JP3583809B2 JP18056494A JP18056494A JP3583809B2 JP 3583809 B2 JP3583809 B2 JP 3583809B2 JP 18056494 A JP18056494 A JP 18056494A JP 18056494 A JP18056494 A JP 18056494A JP 3583809 B2 JP3583809 B2 JP 3583809B2
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- pump
- pressure side
- side pump
- rotation speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images







Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2/00—Rotary-piston machines or pumps
- F04C2/08—Rotary-piston machines or pumps of intermeshing-engagement type, i.e. with engagement of co-operating members similar to that of toothed gearing
- F04C2/10—Rotary-piston machines or pumps of intermeshing-engagement type, i.e. with engagement of co-operating members similar to that of toothed gearing of internal-axis type with the outer member having more teeth or tooth-equivalents, e.g. rollers, than the inner member
- F04C2/107—Rotary-piston machines or pumps of intermeshing-engagement type, i.e. with engagement of co-operating members similar to that of toothed gearing of internal-axis type with the outer member having more teeth or tooth-equivalents, e.g. rollers, than the inner member with helical teeth
- F04C2/1071—Rotary-piston machines or pumps of intermeshing-engagement type, i.e. with engagement of co-operating members similar to that of toothed gearing of internal-axis type with the outer member having more teeth or tooth-equivalents, e.g. rollers, than the inner member with helical teeth the inner and outer member having a different number of threads and one of the two being made of elastic materials, e.g. Moineau type
Description
【産業上の利用分野】
この発明は一軸偏心ねじポンプを少なくとも2台組み合わせて高い吐出力を得られるようにした高圧型一軸偏心ねじポンプ装置に関し、詳しくはその制御方法に関するものである。
【0002】
【従来の技術】
一軸偏心ねじポンプは、周知のようにステータに形成される長円形の雌ねじ孔内に、断面円形の雄ねじロータを偏心ロータ軸を中心にして係合回転させることにより、ポンピング作用を発生させる容積形ポンプである。この構造のポンプの場合、ステータおよびロータの1段当たりで発生可能な圧力が、4〜10kg/cm2程度である。このため、高い吐出圧が必要なときには、ステータおよびロータを複数段連結することによって、高圧力を得ることができる。しかし、ステータおよびロータを8段程度まで連結すると、ポンプ装置が非常に長くなり、大きな設置場所を要するうえ、メンテナンスが困難になる。
【0003】
一方、せいぜい2〜4段のステータおよびロータを連結したポンプ101・102を、図8のように2台接続することによって、高い吐出力を発生させることが可能な構造のポンプ装置100が存在している。この場合、一方のポンプがブースターポンプ(押し込みポンプ)101を構成し、他方のポンプがフィードポンプ(供給ポンプ)102を構成する。こうしたポンプ装置では、一般的に、ブースターポンプ101に余力が生じるので、フィードポンプ102とのバランスを図る必要があるが、普通は被搬送物が非圧縮性物質であるため、冷媒ガスなどの圧縮性流体を数台のコンプレッサで凝縮する場合と違って、二つのポンプ101・102間での圧力変動が急激に生じるため、ポンプ101・102同士の運転制御が難しい。
【0004】
従来、そのための方法の一つに、図8のようにブースターポンプ101から吐出される被搬送物の一部を配管103からバイパス管104によりバイパスさせてブースターポンプ101へ一部循環させる構造にし、循環させる被搬送物の量を流量調整弁105を介して調節することによって、フィードポンプ102とのバランスを図る方法がある。この方法の場合、フィードポンプ102に比べてブースターポンプ101に容量の大きなポンプを使用し、ブースターポンプ101は常時運転する必要がある。他の方法として、図8に二点鎖線で示すように、圧力スイッチ106を介してブースターポンプ101とフィードポンプ102間の供給ラインにおける圧力の増減によって、ブースターポンプ101の運転をON−OFFする方法があるが、この方法の場合もブースターポンプ101に大容量のポンプを使用する必要がある。なお図中の符号101a・102aはモータ、107は圧力計、108は撹拌機である。
【0005】
【発明が解決しようとする課題】
しかしながら、上記した2台のポンプを組み合わせた構造のポンプ装置には、次のような欠点がある。すなわち、
▲1▼ いずれの方法でも、2台のポンプを別々に運転操作する必要があり、とくに容量変更時などの操作が煩わしい。
【0006】
▲2▼ 2台のポンプの容量が異なるため、設備が高くなる。
【0007】
▲3▼ ブースターポンプを余分に運転させる必要があるため、ロスが多く、不経済である。
【0008】
▲4▼ したがって、実際には上記した方法は高粘度流体をフィードポンプに文字どおり押し込むためのブースターとしての役割で用いられるのが一般的であり、高圧力を得るためのようとは皆無であった。
【0009】
この発明は上述の点に鑑みなされたもので、吐出力の高圧化に対応することに主眼をおき、かつ少なくとも2台の一軸偏心ねじポンプを組み合わせたときに、1)ポンプの操作を容易にすること、2)2台以上のポンプの運転を相互に関連して行ないエネルギーロスを削減すること、3)装置全体の小型化を図り、設置スペースを小さくし、メンテナンスを楽にすること、を主な目的としている。
【0010】
【課題を解決するための手段】
上記の目的を達成するためにこの発明の高圧型一軸偏心ねじポンプ装置は、可変速モータで駆動される少なくとも2台の一軸偏心ねじポンプを配管を介して接続し、高圧側の前記ポンプの吸込口付近に、前記配管内の圧力に基づいて該ポンプの運転と停止を指示する圧力スイッチを設けるとともに、前記配管に、上限圧と下限圧とを設定可能な圧力センサーを介設し、前記ポンプのうち低圧側ポンプを所定の速度で定速回転させる一方、前記ポンプのうち高圧側ポンプは、前記配管内の圧力が設定した上限圧と下限圧の範囲内になるように前記圧力センサーを介して回転速度を制御するものである。
【0011】
請求項2記載のように、前記高圧側ポンプの回転速度(NH)の制御は、前記低圧側ポンプの回転速度(NL)を基準にして、NH≒(0.5〜2.0)NLとし、前記圧力センサーからの上限圧信号で前記高圧側ポンプの回転速度をΔN(NH×(0.01〜0.2))だけ上昇させ、同下限圧信号で前記高圧側ポンプの回転速度をΔN(NH×(0.01〜0.2))だけ下降させることができる。
【0012】
【作用】
上記した構成を有するこの発明の高圧型一軸偏心ねじポンプ装置によれば、使用者が低圧側のポンプの回転速度を被搬送物の搬送量に応じて設定し、スタートボタンを押すなどの方法で低圧側ポンプの運転を開始するだけで、2台(低圧側と高圧側)のポンプが次のようにして連続的に同期運転される。すなわち、
1) 低圧側ポンプが運転されることにより、被搬送物が配管内へ吐出され、配管内の圧力が上昇する。
【0013】
2) 圧力スイッチがONになり、高圧側ポンプの運転があらかじめ設定した回転速度(回転数)で始まる。
【0014】
3) 配管内の圧力(中間圧)が圧力センサーで検出され、中間圧が上限圧に達すると、高圧側ポンプの回転速度が上昇するから、これによって高圧側ポンプの吐出量が増えるため中間圧が低下する一方、中間圧が下限圧に達すると、高圧側ポンプの回転速度が下降するから、これによって高圧側ポンプの吐出量が減るため中間圧が上昇する。
【0015】
4) 上記した3)の作用により中間圧が所定の圧力範囲内に制御され、低圧側および高圧側の2台のポンプがそれぞれ連続的に同期運転される。なお、低圧側ポンプは最初に設定した回転速度で定速運転される。また、搬送量や被搬送物の変更に伴って使用者が低圧側ポンプの回転速度を変更(あるいは調整)することにより、高圧側ポンプの回転速度も連係して自動的に比例して変更されることになる。
【0016】
請求項2記載のポンプ装置では、高圧側ポンプの回転速度(NH)が、低圧側ポンプの回転速度(NL)を基準にして、ポンプの組み合わせに応じて初期値としてNH≒(0.5〜2.0)NLとなるように、つまり高圧側ポンプの回転速度は低圧側ポンプの回転速度の1/2倍、1倍、2倍などになるように決定される。そのうえで、前記圧力センサーからの上限圧信号で高圧側ポンプの回転速度がΔN(高圧側ポンプの回転速度の1%〜10%)上昇し、下限圧信号で高圧側ポンプの回転速度がΔN(高圧側ポンプの回転速度の1%〜10%)下降する。中間圧が設定変動圧外になると、上記制御が繰り返し行われることにより、高圧側ポンプの運転開始後速やかに、中間圧が設定された圧力変動範囲内に落ち着くことになる。とくにΔNの値を繰り返し回数が可及的に少なくなるよう自動制御する機能を加えれば、瞬時に中間圧が設定変動圧範囲内に落ち着く。
【0017】
【実施例】
以下、この発明の高圧型一軸偏心ねじポンプ装置の実施例を図面に基づいて説明する。
【0018】
図1は本実施例にかかる高圧型一軸偏心ねじポンプ装置の全体構成を示すブロック図、図2は図1の装置のポンプの一部を詳細に示す断面図、図3および図4は高圧側ポンプの回転速度の制御手順を示すフローチャートで、図3は基本的な全体のフローチャート、図4は図3の同期運転制御の詳細なフローチャートである。
【0019】
図1に示すように、本例のポンプ装置1は、脱水ケーキ(下水汚泥をはじめ、工場廃水、とくに食品工場の廃液などを処理施設で沈殿させて脱水することにより得られるケーキ状の物質)などを搬送するのに使用される。ポンプ装置1は2台の一軸偏心ねじポンプ2・3を備え、低圧側ポンプ2のステータ21の吐出口21aと高圧側ポンプ3のステータ31の吸込口31aとが、U字状の配管4により接続されている。
【0020】
低圧側ポンプ2のケーシング22の上端に吸込口22aが開口され、この吸込口22aの上方にに撹拌機5が一体に取り付けられている。撹拌機5のホッパー状容器54の下端に搬出口54aが、上端に搬入口54bがそれぞれ開口され、下端の搬出口54aとケーシング22の吸込口22aが一体に連結されている。撹拌機5は公知のもので、撹拌機5内の底部には、モータ51で駆動される回転軸52が横向きに貫通して配設され、回転軸52上には軸方向に間隔をあけて複数の撹拌翼53が傾斜して取着されている。またホッパー状容器54には、脱水ケーキの収容量の上限と下限を検知するための2つのレベル計55がそれぞれ装着されている。
【0021】
図2に示すように、円筒状のケーシング22内にはスクリューロッド23が配設され、ケーシング22の前方に上記したステータ21が連設されている。ステータ21内には雄ねじ状ロータ25が嵌挿され、雄ねじ状ロータ25の一端にスクリューロッド23の一端が接続されている。スクリューロッド23の他端には、可変速のインバータモータ6が接続されている。図1のように、インバータモータ6にはインバータ6aが接続されている。なお、スクリューロッド23の両端にはユニバーサルジョイント23aがそれぞれ介設されている。また、図2では、ステータ21およびロータ25をそれぞれ1段ずつしか示していないが、本例では低圧側ポンプ2だけの吐出圧が24kg/cm2程度必要であるので、ステータ21およびロータ25は3〜4段連結したものが使用される。
【0022】
高圧側ポンプ3も低圧側ポンプ2とほぼ同一の構造からなり、本例では両方のポンプ2・3のサイズ(容量)も同一である。相違するところは、高圧側ポンプ3では、スクリューロッド23に代えてカップリングロッド33が使用されていること、またケーシング32の下端に吐出口32a(図2参照)が設けられていることである。高圧側ポンプ3でも、カップリングロッド33の一端に可変速のインバータモータ7が接続され、インバータモータ7にはインバータ7aが接続されている。なお、吐出口32aには供給管41が連結されている。そして、インバータ6a、7aおよびモータ51に、これらの制御を行う制御盤8が接続されている。
【0023】
配管4の中間位置に、圧力センサー81が装着されている。この圧力センサー(PIA)81は,上限圧と下限圧とを任意に設定できるようになっている。そして、配管4の内圧が設定した上限圧値(たとえば24+2kg/cm2)あるいは下限圧値(たとえば24−2kg/cm2)に達すると、それぞれの信号を制御盤8に発するように、圧力センサー81と制御盤8とが接続されている。また配管4において高圧側ポンプ3の吸込口32aの近傍に、圧力スイッチ(PS)82が装着され、設定された低圧力値(本例では、1kg/cm2)以上の圧力を感知すると高圧側ポンプ3のインバータモータ7の運転(回転)を開始するON信号を発し、設定された高圧力値(本例では、30kg/cm2)以上の圧力を感知すると高圧側ポンプ3のインバータモータ7の運転(回転)を停止するOFF信号を発するように、圧力センサー81が制御盤8に接続されている。また配管4に圧力計45が、供給管41に圧力計46がそれぞれ装着されている。
【0024】
次に、制御盤8内に組み込まれているCPUあるいはシーケンスによる高圧側ポンプ3の運転の制御方法の一例を説明する。図3に示すように、
(1) 撹拌機5の運転は、制御盤8のメインスイッチ(図示せず)をONにすることにより、モータ51により所定の回転速度で一定速度で行われる(STEP1)。
【0025】
(2) 撹拌機5の運転開始から所定時間(通常、5〜10秒)経過したのち、低圧側ポンプ2がインバータ6aおよびインバータモータ6を介して運転を開始する(STEP2)。低圧側ポンプ2の回転速度は、撹拌機5から搬出される脱水ケーキの量に応じて制御盤8によりあらかじめ外部入力される。
【0026】
(3) 低圧側ポンプ2から配管4内に脱水ケーキが吐出されることにより、配管4内の圧力が上昇する。圧力スイッチ82の低圧スイッチ82Lがオン(ON)になるか否かがが判断され(STEP3)、低圧スイッチ82Lがオンになると、高圧側ポンプ3がインバータ7aおよびインバータモータ7を介して運転を開始する(STEP4)。
【0027】
高圧側ポンプ3の回転速度(NH)は、低圧側ポンプ2の回転速度(NL)を基準にして、ポンプ2・3の組み合わせに応じてNH≒(0.5〜2.0)NLのように決められる。本例のように脱水ケーキを搬送する場合は、その含水率と流動性の関係から、低圧側ポンプ2での容積効率がほぼ50%になる場合があるのに対し、高圧側ポンプ3での容積効率は低圧側ポンプ2による押し込み効果によってほぼ100%になるが、本例ではポンプ2と高圧側ポンプ3のサイズを同一にしているので、高圧側ポンプ3の回転速度(NH)は、初期値として低圧側ポンプ2の回転速度(NL)の1/2に設定される。つまり、連動係数Kは0.5である。
【0028】
(4) 一方、低圧スイッチ82Lがオンにならないときには、タイムオーバか否かが判断され(STEP5)、タイムオーバ(通常、20〜30秒に設定)であると、低圧側ポンプ2の運転が停止されるとともに、アラームが鳴る(STEP6)。
【0029】
(5) 2台のポンプ2・3が同期して運転される。この間、低圧側ポンプ2は定速運転されるが、高圧側ポンプ3は配管4内の圧力が設定した範囲内(24±2kg/cm2)におさまるように、回転速度が調整される(STEP7)。このSTEP7の詳細については後述する。
【0030】
(6) 2台のポンプ2・3の同期運転中に、圧力スイッチ82の高圧スイッチ82Hがオンになるか否か判定され(STEP8)、高圧スイッチ82Hがオンになると、撹拌機5、低圧側ポンプ2および高圧側ポンプ3の全ての運転が一斉に停止し、アラームが鳴る(STEP9)。
【0031】
(7) 制御盤8から停止の入力、すなわちメインスイッチを切られるか否かが監視されており(STEP10)、メインスイッチが切られると、撹拌機5、低圧側ポンプ2および高圧側ポンプ3の全ての運転が一斉に停止する。
【0032】
続いて、STEP7の制御手順について説明する。図4に示すように、
51)圧力センサー81によって配管4内の圧力が常時検出されている(STEP71)。
【0033】
52)配管4内の圧力が設定した上限圧と下限圧の範囲(本例では、24±2kg/cm2)内か否かが判定され(STEP72)、範囲内であるとSTEP71に戻る。
【0034】
53)一方、設定した範囲を越えていると、上限圧(26kg/cm2)をオーバーしているか否かが判定され(STEP73)、オーバーしていると圧力センサー81から上限圧信号が制御盤8へ出力され、つまりPIAHがオンになる(STEP74)。すると、高圧側ポンプ3の回転速度(回転数)が所定速度増加される(STEP75)。本例では、連動係数Kが0.5で、増減速度ΔKが0.05Kに設定されているので、高圧側ポンプ3の回転速度が低圧側ポンプ2の0.55倍となり、連動係数Kが0.55に修正される(STEP76)。STEP76が終了すると、STEP71へ戻る。
【0035】
54)上限圧(26kg/cm2)をオーバーしていなければ、下限圧(22kg/cm2)より低いということであるから、圧力センサー81から下限圧信号が制御盤8へ出力され、つまりPIALがオンになる(STEP77)。すると、高圧側ポンプ3の回転速度(回転数)が所定速度低減される(STEP78)。本例では、初期の連動係数Kが0.5で、増減速度ΔKが0.05Kに設定されているので、高圧側ポンプ3の回転速度が低圧側ポンプ2の0.45倍となり、連動係数Kが0.45に修正される(STEP79)。STEP79が終了すると、STEP71へ戻る。
【0036】
このようにして、配管4内の圧力(中間圧)が所定の圧力範囲(24±2kg/cm2)内に制御され、低圧側ポンプ2および高圧側ポンプ3がそれぞれ同期して連続的に運転される。
【0037】
図5は本発明の他の実施例にかかる高圧型一軸偏心ねじポンプ装置の全体構成を示すブロック図、図6は図5の高圧側ポンプの吸込口に取り付けられることがある伸縮継手の一例を拡大して示す断面図である。
【0038】
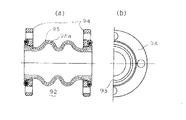
本実施例のポンプ装置1’が上記実施例のポンプ装置1と相違するところは、次の二点である。すなわち、上限圧・下限圧設定付きの圧力センサー81に代えて、図5に示すように圧力センサーの一種である圧力指示調節計(PIC)91を用いたこと、また、配管4と高圧側ポンプ3の吸込口31aの間に、アキュムレータとしての伸縮継手92を介設したことである。この伸縮継手92は公知の構造で、図6のように、補強布93aを一体に内装したゴム製の蛇腹筒93の両端周縁部をフランジ94に装着し、フランジ94を介して配管4の出口とポンプ3の吸込口31aとに接続するようにしている。
【0039】
本例のポンプ装置1’によると、圧力指示調節計91を使用したことで、配管4内の圧力(中間圧)がほぼ所定圧力(24kg/cm2)に制御され、中間圧のバラツキが極めて小さくなる。配管4内で急激な圧力変動が生じたときには、伸縮継手92の伸縮作用によって吸収緩和されるから、高圧側ポンプ3の運転制御が容易になる。すなわち、何等かの方法でアキュムレータ効果を持たせると、制度のよい調節も可能になる。その他の構成および作用については、上記実施例と共通しているので、図5に上記実施例と共通の部材は同一の符号を用いて示し、説明を省略する。
【0040】
さて、上記に二つの実施例を示したが、本発明は以下のように実施することができる。
【0041】
a) 脱水ケーキ以外に、たとえば各種クリーム、味噌、グリスなどの圧縮性のほとんどない被搬送物を高圧で搬送することができる。この場合には、高圧側ポンプ3の回転速度の連動係数Kを被搬送物の種類とポンプの組み合わせに応じて変更する必要がある。
【0042】
b) 低圧側ポンプ2のステータ21の吐出口21aと高圧側ポンプ3のケーシング3の吸込口32aとを配管で接続し、ステータ31の吐出口31aに供給管41を接続してもよい。
【0043】
c) 高圧側ポンプ3を2台以上にし、全体で3台以上のポンプを運転する場合にも適用できる。
【0044】
d) 高圧側ポンプ3の回転速度を制御するSTEP7の制御手順の詳細なフローチャートを、たとえば、次のように変更することができる。
【0045】
すなわち、図7に示すように、
151)圧力センサー81によって配管4内の圧力が常時検出されている(STEP71)。
152)配管4内の圧力が設定した上限圧(26kg/cm2)をオーバーしていると、圧力センサー81から上限圧信号が制御盤8へ出力されてPIAHがオンになるとともに、PIAHオンが1回目か否かが判定される(STEP74’)。そして、1回目のPIAHオンであると、高圧側ポンプ3の回転速度が所定速度増加される(STEP75’)。本例では、連動係数Kが0.5で、増減速度ΔKが0.05Kに設定されているので、高圧側ポンプ3の回転速度が低圧側ポンプ2の0.55倍となり、連動係数Kが0.55に修正される(STEP76’)。STEP76’が終了すると、STEP71へ戻る。
153) 一方、PIAHオンが1回目でないときには、あらかじめセットした増加待ち時間(圧力センサー81による圧力検出から通常1〜2秒程度)をオーバーしているか否かが判定され(STEP80)、オーバーしていないときにはあらかじめセットした増減監視時間(圧力センサー81による圧力検出から通常0.5秒程度)をオーバーしているか否かが判定される(STEP81)。そしてオーバーしていなければSTEP71に戻り、逆にオーバーしていればSTEP75’へ戻り、高圧側ポンプ3の回転速度が所定速度増加され、STEP76’で連動係数Kが修正されてから、STEP71へ戻る。
【0046】
さらに増加待ち時間をオーバーしていると、高圧側ポンプ3の回転速度が急加速される(STEP82)。このときの高圧側ポンプ3の回転速度は、最新の回転速度にΔNU(たとえば初期NHの20%程度)加算した速度になる。
154) 反対に、配管4内の圧力が設定した下限圧(22kg/cm2)を下方にオーバーしていると、圧力センサー81から下限圧信号が制御盤8へ出力されてPIALがオンになるとともに、PIALオンが1回目か否かが判定される(STEP77’)。そして、1回目のPIALオンであると、高圧側ポンプ3の回転速度が所定速度減少される(STEP78’)。本例では、連動係数Kが0.5で、増減速度ΔKが0.05Kに設定されているので、高圧側ポンプ3の回転速度が低圧側ポンプ2の0.45倍となり、連動係数Kが0.45に修正される(STEP79’)。STEP79’が終了すると、STEP71へ戻る。
155) 一方、PIALオンが1回目でないときには、あらかじめセットした減少待ち時間(圧力センサー81による圧力検出から通常1〜2秒程度)をオーバーしているか否かが判定され(STEP83)、オーバーしていないときにはあらかじめセットした増減監視時間(圧力センサー81による圧力検出から通常0.5秒程度)をオーバーしているか否かが判定される(STEP84)。そしてオーバーしていなければSTEP71に戻り、逆にオーバーしていればSTEP78’へ戻り、高圧側ポンプ3の回転速度が所定速度減少され、STEP79’で連動係数Kが修正されてから、STEP71へ戻る。
【0047】
さらに減少待ち時間をオーバーしていると、高圧側ポンプ3の回転速度が急減速される(STEP85)。このときの高圧側ポンプ3の回転速度は、最新の回転速度からΔND(たとえば初期NHの20%程度)減算した速度になる。
156) 圧力センサー81による検出圧力が配管4内の圧力が設定した上限圧と下限圧の範囲(本例では、24±2kg/cm2)内になって、PIAH又はPIALが解除されると、高圧側ポンプ3の回転速度は、ΔNUを加算又はΔNDを減算する前の回転速度に復元され(STEP86)、STEP71に戻る。
【0048】
このように制御すれば、ΔNの値を繰り返し回数がかなり少なくなり、瞬時に中間圧が設定変動圧範囲内に落ち着く。配管4内の圧力(中間圧)が所定圧力範囲(24±2kg/cm2)内に制御される。
【0049】
【発明の効果】
以上説明したことから明らかなように、本発明の高圧型一軸偏心ねじポンプ装置には、次のような効果がある。
【0050】
(1) 吐出力の高圧化に対応して2台ないし2台以上の一軸偏心ねじポンプを組み合わせたときに、1台のポンプを操作するのと同じように簡単に操作でき、また2台以上のポンプの運転を同期させて連続運転できるので、エネルギーのロスがほとんどなく経済的である。このため、高圧化を少数段のステータおよびロータの連結デ達成できるため、装置全体の小型化が図られ、設置スペースが小さくなり、メンテナンスも容易になる。
【0051】
(2) 請求項2記載のポンプ装置では、被搬送物や搬送量に応じて低圧側ポンプの回転速度を調整すれば、高圧側ポンプの回転速度が自動的に決定され、また中間圧が設定された圧力変動範囲内に極めて短い時間で落ち着く。
【図面の簡単な説明】
【図1】本発明の実施例にかかる高圧型一軸偏心ねじポンプ装置の全体構成を示すブロック図である。
【図2】図1の装置のポンプの一部を詳細に示す断面図である。
【図3】図1の装置の高圧側ポンプの回転速度の制御手順を示す基本的な全体のフローチャートである。
【図4】図3の同期運転制御の詳細なフローチャートである。
【図5】本発明の他の実施例にかかる高圧型一軸偏心ねじポンプ装置の全体構成を示すブロック図である。
【図6】図5の高圧側ポンプの吸込口に取り付けられることのある伸縮継手の一例を拡大して示す断面図である。
【図7】図3の同期運転制御の他の例にかかる詳細なフローチャートである。
【図8】2台のポンプを接続した従来の一般的な高圧型一軸偏心ねじポンプ装置の全体構成を示すブロック図である。
【符号の説明】
1・1’ポンプ装置
2 低圧側ポンプ
3 高圧側ポンプ
4 配管
6・7 インバータモータ
8 制御盤
81 圧力センサー(PIA)
82 圧力スイッチ(PS)
Claims (2)
- 可変速モータで駆動される少なくとも2台の一軸偏心ねじポンプを配管を介して接続し、
高圧側の前記ポンプの吸込口付近に、前記配管内の圧力に基づいて該ポンプの運転と停止を指示する圧力スイッチを設けるとともに、
前記配管に、上限圧と下限圧とを設定可能な圧力センサーを介設し、
前記ポンプのうち低圧側ポンプを所定の速度で定速回転させる一方、前記ポンプのうち高圧側ポンプは、前記配管内の圧力が設定した上限圧と下限圧の範囲内になるように前記圧力センサーを介して回転速度を制御することを特徴とする高圧型一軸偏心ねじポンプ装置。 - 前記高圧側ポンプの回転速度(NH)の制御は、前記低圧側ポンプの回転速度(NL)を基準にして、NH≒(0.5〜2.0)NLとし、前記圧力センサーからの上限圧信号で前記高圧側ポンプの回転速度をΔN(NH×(0.01〜0.2))だけ上昇させ、同下限圧信号で前記高圧側ポンプの回転速度をΔN(NH×(0.01〜0.2))だけ下降させる請求項1記載の高圧型一軸偏心ねじポンプ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP18056494A JP3583809B2 (ja) | 1994-07-07 | 1994-07-07 | 高圧型一軸偏心ねじポンプ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP18056494A JP3583809B2 (ja) | 1994-07-07 | 1994-07-07 | 高圧型一軸偏心ねじポンプ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH0821370A JPH0821370A (ja) | 1996-01-23 |
| JP3583809B2 true JP3583809B2 (ja) | 2004-11-04 |
Family
ID=16085490
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP18056494A Expired - Lifetime JP3583809B2 (ja) | 1994-07-07 | 1994-07-07 | 高圧型一軸偏心ねじポンプ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3583809B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5992686A (en) * | 1998-02-27 | 1999-11-30 | Fluid Research Corporation | Method and apparatus for dispensing liquids and solids |
| BE1012944A3 (nl) * | 1999-10-26 | 2001-06-05 | Atlas Copco Airpower Nv | Meertraps-compressoreenheid en werkwijze voor het regelen van een der gelijke meertraps-compressoreenheid. |
| JP5079516B2 (ja) | 2004-11-23 | 2012-11-21 | インテグリス・インコーポレーテッド | 可変定位置ディスペンスシステムのためのシステムおよび方法 |
| US7878765B2 (en) * | 2005-12-02 | 2011-02-01 | Entegris, Inc. | System and method for monitoring operation of a pump |
| KR101243509B1 (ko) | 2005-12-02 | 2013-03-20 | 엔테그리스, 아이엔씨. | 펌프에서의 압력 보상을 위한 시스템 및 방법 |
| US20080095643A1 (en) * | 2006-10-11 | 2008-04-24 | Weatherford/Lamb, Inc. | Active intake pressure control of downhole pump assemblies |
| JP5163574B2 (ja) * | 2009-03-24 | 2013-03-13 | 東芝三菱電機産業システム株式会社 | 流体制御装置 |
| JP7217015B2 (ja) * | 2018-05-11 | 2023-02-02 | 兵神装備株式会社 | ポンプシステム |
-
1994
- 1994-07-07 JP JP18056494A patent/JP3583809B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JPH0821370A (ja) | 1996-01-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3583809B2 (ja) | 高圧型一軸偏心ねじポンプ装置 | |
| CN101166902B (zh) | 泵抽系统及运行方法 | |
| JP2000027767A (ja) | コンプレッサの逆回転判定システム | |
| JPH1082391A (ja) | 2段スクリュー圧縮機の制御装置 | |
| US5601414A (en) | Interstage liquid/gas phase detector | |
| US20090108797A1 (en) | Method for driving an asynchronous motor and pump arrangement with asynchronous motor | |
| JP2024507235A (ja) | 液体リングポンプの制御 | |
| JP2016133035A (ja) | ポンプの制御装置 | |
| WO2004018879A1 (en) | Vacuum pump and method of starting the same | |
| JPH0861246A (ja) | 可変速ポンプ装置 | |
| EP0750116B1 (en) | Control method for displacement-type fluid machine, and apparatus thereof | |
| JP3425269B2 (ja) | 可変速給水装置 | |
| US6053703A (en) | Control method for displacement-type fluid machine, and apparatus thereof | |
| JP2001349286A (ja) | ポンプの運転制御装置及び方法 | |
| JPH03279694A (ja) | 真空ユニット | |
| US20240133380A1 (en) | Control of liquid ring pump | |
| JP2007295673A (ja) | モータ制御装置 | |
| JP4417178B2 (ja) | 圧縮空気製造システム | |
| JP3054352B2 (ja) | 並列接続されたポンプの運転方法 | |
| JPH07268914A (ja) | 水中ポンプと受水槽一体型加圧給水システム | |
| JP2001263252A (ja) | ポンプのインバータ制御装置 | |
| WO2022175828A1 (en) | Control of liquid ring pump | |
| JP3292325B2 (ja) | 直結ユニットの強制運転方法 | |
| JP2006017041A (ja) | 回転式圧縮機 | |
| JP2003278659A (ja) | 給水装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040601 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040720 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040730 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080806 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090806 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100806 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110806 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120806 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120806 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130806 Year of fee payment: 9 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |