JP3573155B2 - 回転速度検出装置付背面組み合わせ型転がり軸受ユニット - Google Patents
回転速度検出装置付背面組み合わせ型転がり軸受ユニット Download PDFInfo
- Publication number
- JP3573155B2 JP3573155B2 JP2003200541A JP2003200541A JP3573155B2 JP 3573155 B2 JP3573155 B2 JP 3573155B2 JP 2003200541 A JP2003200541 A JP 2003200541A JP 2003200541 A JP2003200541 A JP 2003200541A JP 3573155 B2 JP3573155 B2 JP 3573155B2
- Authority
- JP
- Japan
- Prior art keywords
- locking
- coupling spring
- cover
- sensor unit
- ring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









































Landscapes
- Regulating Braking Force (AREA)
- Clamps And Clips (AREA)
- Rolling Contact Bearings (AREA)
Description
【発明の属する技術分野】
この発明に係る回転速度検出装置付背面組み合わせ型転がり軸受ユニットは、自動車の車輪を懸架装置に対して回転自在に支持すると共に、この車輪の回転速度を検出する為に利用する。
【0002】
【従来の技術】
自動車の車輪を懸架装置に対して回転自在に支持するのに、転がり軸受ユニットを使用する。又、アンチロックブレーキシステム(ABS)やトラクションコントロールシステム(TCS)を制御する為には、上記車輪の回転速度を検出する必要がある。この為、上記転がり軸受ユニットに回転速度検出装置を組み込んだ回転速度検出装置付転がり軸受ユニットにより、上記車輪を懸架装置に対して回転自在に支持すると共に、この車輪の回転速度を検出する事が、近年広く行なわれる様になっている。
【0003】
図59〜60は、この様な目的で使用される回転速度検出装置付転がり軸受ユニットの従来構造の1例として、実開平7−31539号公報に記載されたものを示している。この回転速度検出装置付転がり軸受ユニットは、使用時にも回転しない静止輪である外輪1の内側に、使用時に回転する回転輪であるハブ2を回転自在に支持している。そして、このハブ2の一部に固定したエンコーダ3の回転速度を、上記外輪1に支持したセンサ4により検出自在としている。即ち、静止側周面である、上記外輪1の内周面には、それぞれが静止側軌道である、複列の第一、第二の外輪軌道5a、5bを設けている。又、それぞれが回転側周面である、上記ハブ2の外周面に回転側軌道である第一の内輪軌道8aを、このハブ2の段部115に外嵌してナット6によりこのハブ2に対し結合固定した状態で上記ハブ2と共に上記回転輪を構成する内輪7の外周面に、やはり回転側軌道である第二の内輪軌道8bを、それぞれ設けている。そして、これら各第一、第二の内輪軌道8a、8bと上記各第一、第二の外輪軌道5a、5bとの間にそれぞれ複数個ずつの転動体9、9を、それぞれ保持器10、10により保持した状態で転動自在に設け、上記外輪1の内側に上記ハブ2及び内輪7を、回転自在に支持している。又、図示の例の場合には、各外輪軌道5a、5bの内径の小さい側を中央寄りに位置させる事により、背面組み合わせ型の転がり軸受ユニットとしている。
【0004】
又、上記ハブ2の外端部(自動車への組み付け状態で幅方向外側となる端部を言い、図59の右端部)で上記外輪1の外端部から軸方向外方に突出した部分に、車輪を取り付ける為の回転側フランジ11を設けている。又、上記外輪1の内端部(自動車への組み付け状態で幅方向中央側となる端部を言い、図59の左端部)には、この外輪1を懸架装置に取り付ける為の静止側フランジ12を設けている。又、上記外輪1の外端開口部と上記ハブ2の中間部外周面との間の隙間は、シールリング13により塞いでいる。尚、重量の嵩む自動車用の転がり軸受ユニットの場合には、上記複数個の転動体9、9として、図示の様な玉に代えて、テーパころを使用する場合もある。
【0005】
上述の様な転がり軸受ユニットに回転速度検出装置を組み込むべく、上記内輪7の内端部で上記第二の内輪軌道8bから外れた部分の外周面には、前記エンコーダ3を外嵌固定している。このエンコーダ3は、軟鋼板等の磁性金属板に塑性加工を施す事により、断面L字形で全体を円環状に形成したもので、円筒部15と円輪部16とを備え、このうちの円筒部15を上記内輪7の内端部に締まり嵌めで外嵌する事により、この内輪7の内端部に固定している。又、上記円輪部16には、それぞれがこの円輪部16の直径方向に長いスリット状の透孔17、17を多数、放射状に、円周方向に亙り等間隔で形成する事により、上記円輪部16の磁気特性を、円周方向に亙って交互に且つ等間隔で変化させている。
【0006】
更に、上記外輪1の内端開口部にはカバー18を、上記エンコーダ3の円輪部16の内側面に対向する状態で、嵌合固定している。金属板を塑性加工して成る、このカバー18は、上記外輪1の内端開口部に内嵌固定自在な嵌合筒部19と、この内端開口部を塞ぐ塞ぎ板部20とを有する。この塞ぎ板部20の中央部には、有底円筒状の膨出部21を形成して、この塞ぎ板部20と前記ナット6との干渉を防止している。又、この塞ぎ板部20の外周寄り部分で、この膨出部21よりも直径方向外側部分には透孔22を形成し、この透孔22を通じて上記センサ4の検知部24を、上記カバー18の内側に挿入している。又、上記センサ4の中間部外周面には取付フランジ25を固設しており、この取付フランジ25を上記カバー18の塞ぎ板部20に、止めねじ26、26で固定する事により、上記センサ4を上記カバー18に、所定の位置関係で結合固定している。この様にセンサ4をカバー18に結合固定した状態で、上記検知部24の先端面は、上記エンコーダ3を構成する円輪部16の内側面に、微小隙間を介して対向する。
【0007】
上述の様な回転速度検出装置付背面組み合わせ型転がり軸受ユニットの使用時には、前記外輪1の外周面に固設した静止側フランジ12を懸架装置に対して、図示しないボルトにより結合固定すると共に、前記ハブ2の外周面に固設した回転側フランジ11に車輪を、この回転側フランジ11に設けたスタッド27により固定する事で、上記懸架装置に対して上記車輪を回転自在に支持する。この状態で車輪が回転すると、上記センサ4の検知部24の端面近傍を、上記円輪部16に形成した透孔17、17と、円周方向に隣り合う透孔17、17同士の間に存在する柱部とが交互に通過する。この結果、上記センサ4内を流れる磁束の密度が変化し、このセンサ4の出力が変化する。この様にしてセンサ4の出力が変化する周波数は、上記車輪の回転数に比例する。従って、上記センサ4の出力を図示しない制御器に送れば、ABSやTCSを適切に制御できる。
【0008】
【発明が解決しようとする課題】
本発明は、この様な回転速度検出装置付背面組み合わせ型転がり軸受ユニットの改良に関する。
【0009】
【課題を解決するための手段】
本発明の回転速度検出装置付背面組み合わせ型転がり軸受ユニットは何れも、
外周面に懸架装置に取り付ける為の静止側フランジを、内周面に第一、第二の外輪軌道を、それぞれ有し、使用時にも回転しない外輪と、
一端部外周面に車輪を取り付ける為の回転側フランジを、中間部外周面に上記第一の外輪軌道と対向する第一の内輪軌道を、他端部外周面に段部を、それぞれ有し、使用時に回転するハブと、
外周面に上記第二の外輪軌道と対向する第二の内輪軌道を有し、上記段部に外嵌された状態で、上記ハブの他端部でその端面から突出した部分を直径方向外方にかしめ広げる事により、このハブに結合固定した内輪と、
上記第一、第二の外輪軌道と上記第一、第二の内輪軌道との間に転動自在に設けられた複数個の転動体と、
上記内輪の一部にこの内輪と同心に固定された、円周方向に亙る磁気特性を交互に且つ等間隔に変化させたエンコーダと、
上記外輪の端部に固定されたカバーと、
このカバーに支持された状態で、上記エンコーダの被検出面に対向させたセンサとを備え、
上記支持環は、磁性金属板を折り曲げる事により、円筒部と円輪部とを有する、全体を円環状に形成されたものであり、上記円筒部は、上記内輪に外嵌固定され、上記円輪部には、上記永久磁石が添着されている。
【0010】
特に、本発明の回転速度検出装置付背面組み合わせ型転がり軸受ユニットのうち、請求項1に記載した回転速度検出装置付背面組み合わせ型転がり軸受ユニットに於いては、上記エンコーダの被検出面は、上記第二の内輪軌道上を転動する複数の転動体のピッチ円の 直径よりも直径が小さい部分と直径が大きい部分とを有する。
【0011】
又、請求項2に記載した回転速度検出装置付背面組み合わせ型転がり軸受ユニットに於いては、上記エンコーダの被検出面は、上記第二の内輪軌道の最大直径部の直径よりも直径が小さい部分と直径が大きい部分とを有する。
【0012】
【0013】
【0014】
【作用】
上述の様に構成する本発明の回転速度検出装置付転がり軸受ユニットが、自動車の懸架装置に対して車輪を回転自在に支持すると共に、この車輪の回転速度を検出する際の作用自体は、前述した従来構造の場合と同様である。
【0015】
【0016】
【0017】
【0018】
【発明の実施の形態】
図1〜5は、本発明の実施の形態の第1例を示している。尚、本例の特徴は、転がり軸受ユニットを構成する静止輪の端部に固定したカバーにセンサを装着する部分の構造にある。静止輪に対して回転輪を回転自在に支持して成る、転がり軸受ユニットの構造及び作用は、基本的には前述の図59〜60に示した従来構造と同様であるので、同等部分には同一符号を付して重複する説明を省略若しくは簡略にし、以下、本例の特徴部分並びに前述した従来構造と異なる部分を中心に説明する。尚、本例を表す図は、前述の従来構造を表した図59とは、車両の幅方向に関する内外方向が左右逆になっている。
【0019】
静止輪である外輪1の内端(図1の右端)開口部は、カバー18aにより塞いでいる。このカバー18aは、合成樹脂を射出成形して成る有底円筒状の本体28と、この本体28の開口部に結合した嵌合筒29とから成る。この嵌合筒29は、ステンレス鋼板等の耐食性を有する金属板を塑性変形させて成るもので、断面L字形で全体を円環状とし、嵌合筒部30と、この嵌合筒部30の基端縁(図1の右端縁)から直径方向内方に折れ曲がった内向鍔部31とを備える。この様な嵌合筒29は、この内向鍔部31を上記本体28の射出成形時にモールドする事により、この本体28の開口部に結合している。尚、上記内向鍔部31には、多数の透孔32、32を、円周方向に亙って間欠的に形成している。これら各透孔32、32の内側には上記本体28を構成する合成樹脂が、この本体28の射出成形時に流入して、この本体28と上記嵌合筒29との結合強度を高める。
【0020】
上述の様に構成するカバー18aは、上記嵌合筒29の嵌合筒部30を上記外輪1の内端部に、締まり嵌めで外嵌固定する事により、この外輪1の内端開口部を塞いでいる。又、この状態で上記本体28の開口部端面、即ち、この本体28の外周縁部に形成した円筒壁部36の先端面は、上記外輪1の内端面に当接させる。上記円筒壁部36の先端面には全周に亙って係止溝を形成すると共に、この係止溝内にOリング33を係止している。上記円筒壁部36の先端面と上記外輪1の内端面とを当接させた状態では、上記Oリング33がこの内端面と上記係止溝の底面との間で弾性的に圧縮されて、上記カバー18aと外輪1との結合部をシールし、泥水等の異物が上記カバー18a内に進入するのを防止する。
【0021】
一方、ハブ2と共に回転輪を構成する内輪7の内端部(図1の右端部)には、エンコーダ3aを外嵌固定している。このエンコーダ3aは、支持環34と永久磁石35とから成る。このうちの支持環34は、SPCC等の磁性金属板を折り曲げる事により、断面L字形で全体を円環状に形成し、上記内輪7の内端部に締まり嵌めで外嵌固定している。又、上記永久磁石35は、例えばフェライト粉末を混入したゴムを上記支持環34を構成する円輪部の内側面に、焼き付け等により添着して成る。この永久磁石35は、例えば軸方向(図1の左右方向)に亙って着磁すると共に、着磁方向を円周方向に亙り交互に且つ等間隔で変化させている。従って、上記エンコーダ3aの内側面には、S極とN極とが円周方向に亙り交互に且つ等間隔で配置されている。
【0022】
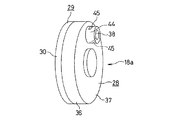
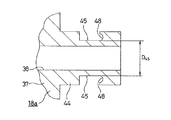
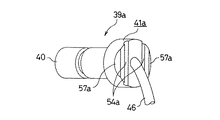
又、上記カバー18aを構成する本体28の底板部37の一部で上記エンコーダ3aを構成する永久磁石35の内側面と対向する部分には、挿入孔38を、上記底板部37を貫通させる状態で、上記外輪1の軸方向に亙り形成している。そして、この挿入孔38内に、センサ若しくはこのセンサを保持したホルダに相当する、センサユニット39の先端寄り部分を挿入している。このセンサユニット39は、ホール素子、磁気抵抗素子(MR素子)等、磁束の流れ方向に応じて特性を変化させる磁気検出素子並びにこの磁気検出素子の出力波形を整える為の波形整形回路を組み込んだICと、上記永久磁石35から出る(或は上記永久磁石35に流れ込む)磁束を上記磁気検出素子に導く為の、磁性材製のポールピース等とを、合成樹脂中に包埋して成る。又、上記ICから整形された波形として出る出力信号を図示しない制御器に送る為のハーネス46の端部を、(コネクタ等を介する事なく)直接上記センサユニット39に接続している。従って、コネクタを省略して、その分、回転速度検出装置付背面組み合わせ型転がり軸受ユニットのコスト低減を図れる。
【0023】
この様なセンサユニット39は、先端(図1の左端)寄り部分に設けられ、上記挿入孔38をがたつきなく挿通自在な円柱状の挿入部40と、この挿入部40の基端部(図1の右端部)に形成した、位置決め部である、外向フランジ状の鍔部41とを備える。上記挿入部40の中間部外周面には係止溝を形成すると共に、この係止溝にOリング42を係止している。上記挿入部40を上記挿入孔38に挿通した状態では、上記Oリング42がこの挿入孔38の内周面と上記係止溝の底面との間で弾性的に圧縮されて、上記挿入部40の外周面と上記挿入孔38の内周面との間をシールする。即ち、上記Oリング42は、泥水等の異物がこの挿入孔38を通じて上記カバー18a及び外輪1の内側に進入するのを防止する。この様に、前記Oリング33により、静止輪である外輪1とカバー18aとの結合部を、上記Oリング42によりこのカバー18aに対する上記センサユニット39の挿通部を、それぞれシールする事により、転がり軸受ユニット中への異物混入防止により、この転がり軸受ユニットの耐久性を確保すると共に、磁性粉等の異物が前記エンコーダ3aを構成する永久磁石35の側面に付着する事を防止し、回転速度検出の精度が悪化する事を防止している。尚、上記カバー18aに対する上記センサユニット39の挿通部をシールする為のシールリングとして、上述の様なOリング42に代えて、断面形状がX字形であるXリング等、他のシールリングを使用すれば、上記挿入孔38に上記センサユニット39の挿入部40を挿入する為に要する力を低減して、このセンサユニット39の装着作業の容易化を図る事もできる。
【0024】
一方、上記カバー18aを構成する前記底板部37の外面(このカバー18aにより塞ぐべき、転動体9、9を設置した空間43と反対側の側面で、図1の右側面)の一部で、上記挿入孔38の開口周囲部分には、係止筒44を設けている。この係止筒44の内周面は、上記挿入孔38の内周面と共に、単一円筒面を構成している。従って、本例の場合には、上記係止筒44の開口端面が、上記挿入孔38の開口周縁部に相当する。又、上記係止筒44の外周面で直径方向反対側2個所位置には、それぞれ係止凹部45、45を設けている。これら各係止凹部45、45は、それぞれ次述する結合ばね47を構成する線材の外径よりも十分に大きな幅を有する。そして、それぞれの片側面で上記係止筒44の先端側(図1、4の右側)内側面に、断面円弧状の係止溝48、48を、上記各係止凹部45、45の全幅に亙って形成している。これら各係止溝48、48の断面の曲率半径は、上記結合ばね47を構成する線材の外周面の曲率半径と同じか、これよりも僅かに大きくしている。
【0025】
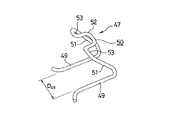
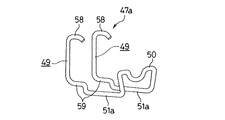
上記センサユニット39の基端部に設けた、位置決め部として機能する前記鍔部41は、上述の様に形成した係止筒44の先端面(図1、4の右端面)に当接させ、次述する結合ばね47により、上記係止筒44に結合固定する。弾性部材である、この結合ばね47は、ステンレスのばね鋼、クロムメッキ若しくは亜鉛メッキを施したばね鋼等、弾性及び耐食性を有する線材を曲げ形成して成る。尚、メッキ処理を施した線材を使用する場合は、遅れ破壊を防止する為、脱水素処理を施す。この結合ばね47は、少なくとも上記係止筒44への組み付け状態で互いに平行になる1対の係止脚部49、49と、上記鍔部41を上記係止筒44の先端面に向け抑え付ける為の抑え部50と、この抑え部50の両端部と上記各係止脚部49、49の基端部(図5の右上端部)とを連結する為の、1対の連結部51、51とから成る。上記抑え部50は、中間部にU字形の湾曲部52を、両端部にこの湾曲部の両端から反対方向に折れ曲がった直線部53、53を、それぞれ有する。上記各連結部51、51の一端は、これら各直線部53、53の端部から同一方向に折れ曲がっている。
【0026】
この様な結合ばね47は、少なくとも使用状態では、上記1対の係止脚部49、49を含む平面と、上記抑え部50を含む平面とが互いに平行になる。但し、上記結合ばね47の自由状態ではこれら各平面同士の間隔が縮まる様に、上記各連結部51、51の一端と上記各係止脚部49、49の基端部との連続部の角度を小さくする方向の弾力を付与している。又、上記1対の係止脚部49、49の本体部分同士の自由状態での間隔D49(図5)は、前記係止凹部45、45同士の間隔D45(図4)よりも少し小さく(D49<D45)している。更に、上記1対の係止脚部49、49の先端部は、互いに逆方向に向け折り曲げて、これら両係止脚部49、49の先端部同士の間隔が、端部に向かう程大きくなる様にしている。
【0027】
一方、前記センサユニット39に設けた鍔部41の基端面(挿入部40と反対側の面で、図1の右端面、図3の手前面)には、上記結合ばね47の抑え部50をがたつきなく係合させる為の、抑え溝54を形成している。この抑え溝54は、前記ハーネス46の基端部を囲む状態で設けた湾曲部55と、この湾曲部55の両端から互いに逆方向に折れ曲がり、上記鍔部41の外周縁に開口した直線部56、56とから成る。又、上記鍔部41の基端面の一部で、上記湾曲部55の凸側に対向する部分には、傾斜面57を形成している。この傾斜面57は、上記鍔部41の厚さが、この鍔部41の端縁に向かう程小さくなる方向に傾斜している。
【0028】
それぞれが上述の様に構成される各部材を組み合わせて、本例の回転速度検出装置付背面組み合わせ型転がり軸受ユニットを構成すべく、上記センサユニット39を前記カバー18aに装着する作業は、次の様にして行なう。先ず、センサユニット39の先端寄り部分である挿入部40を、前記係止筒44及び挿入孔38に挿入し、鍔部41を上記係止筒44の先端面に当接させる。この状態で、上記センサユニット39を構成する挿入部40の先端面に設けた検出部と前記エンコーダ3aを構成する永久磁石35の内側面との間に、所望の厚さ寸法(例えば0.5mm程度)の微小隙間が存在する様に、各部の寸法を規制している。次いで、結合ばね47を上記カバー18aに設けた上記係止筒44と上記センサユニット39との間に装着し、上記鍔部41を上記係止筒44の先端面に押圧する。
【0029】
上述の様に、結合ばね47を上記カバー18aに設けた上記係止筒44と上記センサユニット39との間に装着する作業は、上記結合ばね47を構成する1対の係止脚部49、49を上記係止筒44の係止凹部45、45に、これら係止脚部49、49の先端側から挿入する事により行なう。これら両係止脚部49、49の先端部同士の間隔は、端部に向かう程大きくなっている為、この挿入作業は容易に行なえる。この挿入作業の進行に伴い、前記抑え部50の直線部53、53が上記鍔部41に形成した前記傾斜面57に乗り上げる。この状態から更に上記挿入作業を継続すれば、上記抑え部50が上記鍔部41の基端面に形成した抑え溝54に係合する。尚、この挿入作業の際、前記1対の連結部51、51の一部で上記鍔部41の外周縁に対向する部分が、この鍔部41の外周縁と干渉しない様に、これら1対の連結部51、51の一部で上記抑え部50に近い部分の間隔は、上記鍔部41の外径よりも少し大きくしておく。
【0030】
上述の様に、上記抑え部50が抑え溝54に係合した状態では、上記結合ばね47が上記鍔部41を上記係止筒44の端面に向け、十分に大きな力(例えば10kgf 程度)で押し付けて、上記センサユニット39を上記カバー18aに結合する。又、この状態では、上記各係止脚部49、49と前記各係止溝48、48との係合、並びに上記抑え部50と上記抑え溝54との係合に基づき、上記結合ばね47が上記センサユニット39及び係止筒44から不用意に外れる事がなくなる。この結果、上記センサユニット39が、上記カバー18aから不用意に外れる事がなくなる。
【0031】
上記センサユニット39を上記カバー18aから取り外す際には、上述した装着作業とは逆に、先ず、上記結合ばね47を上記カバー18aと上記センサユニット39との間から取り外す。この取り外し作業は、先ず上記抑え部50を上記鍔部41の基端面から浮かせた後、上記1対の係止脚部49、49を上記係止凹部45、45から抜き取る事により行なう。この様にして上記結合ばね47を取り外した後、上記センサユニット39の挿入部40を、前記挿入孔38及び係止筒44の内側から抜き取る。
【0032】
上記結合ばね47を、上記カバー18aに設けた係止筒44と上記センサユニット39との間に着脱する作業は、止めねじを緊締したり弛めたりする作業に比べて容易且つ迅速に行なえる。従って、本例を含めて各例の構成によれば、上記センサユニット39を上記カバー18aに着脱する作業に要する手間を軽減して、回転速度検出装置付背面組み合わせ型転がり軸受ユニット自体のコスト、並びに修理に要するコストの低減を図れる。
【0033】
尚、上述の説明では、結合ばね47を構成する1対の係止脚部49、49の自由状態での間隔D49を係止筒44の外周面に設けた1対の係止凹部45、45の間隔D45よりも小さくすると共に、これら各係止凹部45、45に係止溝48、48を形成している。但し、上記間隔D49を上記間隔D45よりも小さくすれば、必ずしも上記各係止溝48、48を設けなくても良い。例えば、図1に示す様に、上記各係止凹部45、45を、上記各係止脚部49、49をがたつきなく嵌合できるだけの溝状に形成しても、これら各係止脚部49、49が上記各係止凹部45、45から不用意に外れる事を防止できる。反対に、上記各係止溝48、48を設ければ、必ずしも上記間隔D49を上記間隔D45よりも小さくしなくても、上記各係止脚部49、49が上記各係止凹部45、45から不用意に外れる事を防止できる。但し、結合ばね47によるカバー18aとセンサユニット39との結合強度を十分に確保し、上記結合ばね47の着脱作業をより容易に行なえる様にする為には、図4〜5に示した形状及び寸法の組み合わせが好ましい。
【0034】
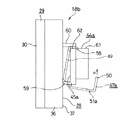
次に、図6〜8は、本発明の実施の形態の第2例を示している。本例の場合には、カバー18bの外面に形成した係止筒44aを、基端寄り(図7の左寄り)の大径部60と、先端寄り(図7の右寄り)の小径部61とから構成している。このうち、大径部60の基端側半部外周面の直径方向反対側2個所位置に、それぞれ係止凹部45a、45aを形成している。これら各係止凹部45a、45aの幅(図7の左右方向寸法)は、結合ばね47aを構成する線材の外径よりも十分に大きくしている。一方、上記結合ばね47aを構成する1対の係止脚部49、49の先端部及び基端部には、それぞれ上記係止筒44aの先端側に向け折れ曲がった、先端側折れ曲がり部58、58と基端側折れ曲がり部59、59とを設けている。又、上記各係止脚部49、49の基端側には、それぞれ連結部51a、51aの一端部を連結し、これら各連結部51a、51aの他端部に抑え部50を、上記各係止脚部49、49と同じ方向に折り曲げた状態で設けている。
【0035】
上述の様な結合ばね47aは、上記各係止脚部49、49を上記各係止凹部45a、45aの内側に緩く係合させると共に、上記各先端側折れ曲がり部58、58を、上記大径部60の先端側半部外周面の一部で上記各係止凹部45a、45aの一端部(図6〜7の上端部)に整合する位置に形成した切り欠き部62、62に係合させている。尚、上記各先端折れ曲がり部58、58の先端部は上記係止脚部49、49の側に少し折り曲げており、この折り曲げ部分を、上記大径部60の先端面に係止している。この状態で上記結合ばね47aは上記係止筒44aの側部に、揺動自在に支持される。又、上記抑え部50は、この揺動に伴って、挿入孔38の開口部ともなる、上記係止筒44aの開口部に向け進退自在となる。尚、実際に自動車に組み付け、センサユニット39(図1、3参照)を未装着の状態で上記結合ばね47aは、自重により、図6〜7に鎖線で示した状態に揺動し、上記抑え部50が上記係止筒44aの開口部から退避する。
【0036】
前述の様に構成する係止筒44aに、上述の様に構成する結合ばね47aを使用して結合するセンサユニット39は、前述の図1〜5に示した第1例の場合と同様に構成している。この様なセンサユニット39を上記係止筒44aの内側に保持固定するには、図6〜7に鎖線で示す様に、上記抑え部50が上記係止筒44aの開口部から退避した状態で、上記センサユニット39の挿入部40を上記係止筒44aの内側並びに挿入孔38内に挿入し、鍔部41を上記係止筒44aの先端面に当接させる。次いで、上記抑え部50を、図6〜7に矢印αで示す様に上方に押圧し、この抑え部50と、上記鍔部41の基端面に形成した抑え溝54とを係合させる(センサユニット39の構成各部に就いては、図1、3参照)。反対に、上記カバー18bから上記センサユニット39を取り外す際には、上記抑え部50を上記矢印αと反対方向に変位させ、この抑え部50を上記係止筒44aの開口部より退避させてから、上記センサユニット39の挿入部40を上記係止筒44aの内側並びに挿入孔38内から抜き取る。以上に述べた通り構成し作用する本例の場合も、上記センサユニット39を、上記カバー18aに着脱する作業に要する手間を軽減して、回転速度検出装置付背面組み合わせ型転がり軸受ユニット自体のコスト、並びに修理に要するコストの低減を図れる。
【0037】
次に、図9〜11は、本発明の実施の形態の第3例を示している。本例の場合には、カバー18cの外面に設けた係止筒44bの先端部外周縁に、互いに平行な1対の直線辺部63、63を有する鍔部64を形成している。本例の場合、上記カバー18cの外面とこの鍔部64の片面との間部分が、後述する結合ばね47bの係止脚部49、49を係合させる為の係止凹部45b、45bとなる。又、上記鍔部64の一端部(図9の左端部)には1対の傾斜辺部65、65を形成して、この鍔部64の幅が一端縁に向かう程小さくなる様にしている。又、上記直線辺部63、63のそれぞれ2個所位置には、第一の係止切り欠き66、66と第二の係止切り欠き67、67とを、互いに整合する状態で形成している。このうち、上記傾斜辺部65、65側に設けた第一の係止切り欠き66、66の上記第二の係止切り欠き67、67側の片側縁は、上記鍔部64の端縁に向かう程これら第二の係止切り欠き67、67に向かう方向に傾斜させている。又、上記鍔部64の他端部(図9の右端部)で上記第二の係止切り欠き67、67の一側面(図9の右側面)を仕切る部分の幅は、隣り合う第一、第二の係止切り欠き66、67同士の間部分の幅よりも大きくしている。
【0038】
一方、上述の様なカバー18bにセンサユニット39(図1、3参照)を結合固定する為の結合ばね47bは、1対の係止脚部49、49と、これら1対の係止脚部49、49同士の間に掛け渡す様にして設けた抑え部50とを備える。この抑え部50の両端部と上記1対の係止脚部49、49の先端部(図9の左端部、図11の左下端部)とは、湾曲した連結部51b、51bにより連結している。これら各連結部51b、51bは、自由状態で上記抑え部50の両端部と上記1対の係止脚部49、49とを近づけ合う方向の弾力を有する。
【0039】
更に、上記各係止脚部49、49の基端部(図9の右端部、図11の右上端部)には、上記鍔部64に向けて折れ曲がった、折れ曲がり係止部68、68を形成している。図示の例ではこれら1対の折れ曲がり係止部68、68同士の間隔を、上記1対の係止脚部49、49の間隔よりも大きくしている。この理由は、これら各係止脚部49、49と前記係止凹部45b、45bとの係合深さを確保して、上記結合ばね47bによる上記センサユニット39の結合強度を確保する一方、上記各折れ曲がり係止部68、68と前記第一、第二の係止切り欠き66、67との係止力が過度に大きくなる事を防止する為である。
【0040】
上述の様な形状を有する結合ばね47bは前記係止筒44bに、前記直線辺部63、63に沿った平行移動自在に支持する。この状態で前記抑え部50は、この平行移動に伴って、挿入孔38の開口部ともなる、上記係止筒44bの開口部に向け進退自在となる。尚、実際に自動車に組み付け、前記センサユニット39を未装着の状態で上記結合ばね47bは、図9に鎖線で示す様に、上記各折れ曲がり係止部68、68と上記第一の係止切り欠き66、66とを係合させた状態として、上記抑え部50を上記係止筒44bの開口部から退避させておく。回転速度検出装置付背面組み合わせ型転がり軸受ユニットを造るメーカーから、自動車の組立工場へは、この様に、上記各折れ曲がり係止部68、68と上記第一の係止切り欠き66、66とを係合させた状態で納入する。この様な状態で上記結合ばね47bは、上記カバー18cの外周面から直径方向外方に突出する事がない。この為、この結合ばね47bが、上記カバー18cを図示しないナックルの支持孔に挿入しつつ、回転速度検出装置付背面組み合わせ型転がり軸受ユニットを自動車の懸架装置に支持する作業の妨げとなる事はない。
【0041】
前述の様に構成する係止筒44bに、やはり前述の様に構成する結合ばね47bを使用して結合するセンサユニット39は、前述の図1〜5に示した第1例の場合と同様に構成している。この様なセンサユニット39を上記係止筒44bの内側に保持固定するには、図9に鎖線で示す様に上記抑え部50を上記係止筒44bの開口部から退避させた状態で、上記センサユニット39の挿入部40を上記係止筒44bの内側並びに挿入孔38内に挿入し、上記センサユニット39の鍔部41を上記係止筒44bの先端面に当接させる。次いで、上記抑え部50を、図9の右方(直径方向外方)に押圧し、この抑え部50と、上記鍔部41の基端面に形成した抑え溝54とを係合させる(センサユニット39の構成各部に就いては、図1、3参照)。この様に抑え部50と抑え溝54とを係合させた状態で、上記各折れ曲がり係止部68、68と上記各第二の係止切り欠き67、67とが係合する。
【0042】
尚、この様に上記結合ばね47bにより上記センサユニット39を前記カバー18cに結合固定する際、上記各折れ曲がり係止部68、68は、上記各第一の係止切り欠き66、66から上記各第二の係止切り欠き67、67に移動する。本例の構造の場合には、この移動は、上記各第一の係止切り欠き66、66の片側縁が傾斜している為、容易に行なえる。又、上記鍔部64の他端部の幅は、隣り合う第一、第二の係止切り欠き66、67同士の間部分の幅よりも大きくしている為、上記各折れ曲がり係止部68、68が上記各第二の係止切り欠き67、67を行き過ぎる事もない。
【0043】
又、上記カバー18cから上記センサユニット39を取り外す際には、上記装着作業時とは反対に、上記結合ばね47bを図9に鎖線で示した状態まで、同図の左方に変位させる。この様に結合ばね47を変位させる作業は、上記抑え部50を上記鍔部41の基端面から浮かせると共に、上記各折れ曲がり係止部68、68同士の間隔を広げつつ行なう。この様にして上記抑え部50を上記係止筒44bの開口部から退避させてから、上記センサユニット39の挿入部40を上記係止筒44bの内側並びに挿入孔38内から抜き取る。以上に述べた通り構成し作用する本例の場合も、上記センサユニット39を、上記カバー18cに着脱する作業に要する手間を軽減して、回転速度検出装置付背面組み合わせ型転がり軸受ユニット自体のコスト、並びに修理に要するコストの低減を図れる。
【0044】
次に、図12〜16は、本発明の実施の形態の第4例を示している。本例の場合には、カバー18dに形成した係止筒44cにセンサユニット39aを、1対の結合ばね47c、47cにより結合固定する様にしている。この為に、上記係止筒44cの外周面の一部で直径方向反対側2個所位置には、それぞれ2個1組の枢支片72、72を、各組毎に間隔をあけて形成している。これら各枢支片72、72は、アーチ状に形成したもので、それぞれの内側に、次述する各結合ばね47cの両端部に形成した枢支部73、73を、揺動自在に枢支自在としている。尚、上記各枢支片72、72の組は、これら各組の枢支片72、72に枢支した1対の結合ばね47c、47cが、揺動に伴って他の構成部品と干渉する事がない様に、上記係止筒44cの外周面のうち、この係止筒44cの円周方向反対側面に設けている。
【0045】
上記1対の結合ばね47c、47cは、それぞれ図15に示す様に、直線状の抑え部50aと上記1対の枢支部73、73とを、それぞれが「く」字形に折れ曲がった弾性脚部74、74により連結して成る。これら弾性脚部74、74は、引っ張り方向の力が加わった場合に伸長方向に弾性変形して、上記抑え部50aと上記各枢支部73、73とが互いに離れる事を許容する。尚、上記各結合ばね47c、47cの両端部に設けた1対の枢支部73、73の方向は、これら両枢支部73、73を枢支すべき上記各枢支片72、72の方向に合わせて、互いに傾斜させている。又、これら1対の枢支部73、73の先端部同士の自由状態での間隔D73は、1組となる上記1対の枢支片72、72同士の間隔D72よりも十分に大きく(D73>D72)している。
【0046】
一方、前記センサユニット39aを構成する鍔部41aの基端面には、互いに平行な抑え溝54a、54aを、ハーネス46を挟む状態で形成している。これら両抑え溝54a、54aには、それぞれ上記結合ばね47c、47cの抑え部50a、50aを、がたつきなく係合自在である。又、上記鍔部41aの基端面の直径方向反対位置で上記各抑え溝54a、54aよりも外周縁寄り部分には、それぞれ傾斜面57a、57aを形成して、上記鍔部41aの厚さを、上記各抑え溝54a、54aからこの鍔部41aの端縁に向かう程小さくしている。
【0047】
上述の様なセンサユニット39aを、前記係止筒44cの内側に保持固定するには、予め上記1対の結合ばね47c、47cの枢支部73、73をそれぞれ上記1組ずつの枢支片72、72に係合させておく。この係合作業は、広い空間で容易に行なえる。そして、上記1対の結合ばね47c、47cを上記係止筒44cの側方に揺動変位させ、これら各結合ばね47c、47cの抑え部50a、50aを上記係止筒44cの開口部から退避させた状態で、上記センサユニット39aの挿入部40を上記係止筒44cの内側並びに挿入孔38内に挿入し、上記鍔部41aを上記係止筒44cの先端面に当接させる。この状態で、上記センサユニット39aを構成する挿入部40の先端面に設けた検出部と前記エンコーダ3を構成する円輪部16の内側面との間に、所望寸法の微小隙間が存在する様に、各部の寸法を規制している。次いで、上記1対の結合ばね47c、47cを、それぞれの抑え部50a、50aを上記鍔部41aに向け近づける方向に揺動変位させて、これら各抑え部50a、50aと、上記鍔部41aの基端面に形成した1対の抑え溝54a、54aとを係合させる。この際、上記各抑え部50a、50aと上記各傾斜面57a、57aとの係合に基づいて、前記各弾性脚部74、74が弾性的に伸びる。そして、上記各抑え部50a、50aと抑え溝54a、54aとが整合した状態では、上記各各弾性脚部74、74の全長が弾性的に縮まり、上記各抑え部50a、50aと抑え溝54a、54aとが係合したままの状態となる。
【0048】
又、上記カバー18dから上記センサユニット39aを取り外す際には、上記装着作業時とは反対に、上記各結合ばね47c、47cを、上記係止筒44cの側方に揺動変位させ、これら各結合ばね47c、47cの抑え部50a、50aを上記各抑え溝54a、54aから外す。この様にして上記各抑え部50a、50aを上記各抑え溝54a、54aから外すと共に、これら各抑え部50a、50aを上記係止筒44cの開口部から退避させてから、上記センサユニット39aの挿入部40を上記係止筒44cの内側並びに挿入孔38内から抜き取る。以上に述べた通り構成し作用する本例の場合も、上記センサユニット39bを、上記カバー18dに着脱する作業に要する手間を軽減して、回転速度検出装置付背面組み合わせ型転がり軸受ユニット自体のコスト、並びに修理に要するコストの低減を図れる。
【0049】
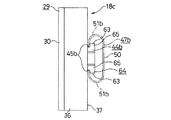
尚、本例の場合には、ハブ2aと共に回転輪を構成する内輪7aの内端部に、前述の図59に示した従来構造に組み込んだものと同様のエンコーダ3を外嵌固定している。特に、本例の構造の場合には、上記内輪7aの内端部で第二の内輪軌道8bから軸方向に外れた部分に、小径の段部69を、全周に亙り上記内輪7aと同心に形成している。そして、この段部69に、上記エンコーダ3を構成する円筒部15を外嵌固定している。又、上記エンコーダ3の被検出面は、上記第二の内輪軌道8b上を転動する複数の転動体9、9のピッチ円の直径d 9 よりも直径が小さい部分と直径が大きい部分とを有する。又、上記エンコーダ3の被検出面は、上記第二の内輪軌道8bの最大直径部の直径d 8b よりも直径が小さい部分と直径が大きい部分とを有する。上記段部69を形成する理由は、カバー18dの直径を大きくする事なく、上記エンコーダ3とセンサユニット39aを構成する挿入部40の先端面とを対向させる為である。
【0050】
即ち、転がり軸受ユニットに大きなスラスト荷重或はモーメント荷重が加わった場合にも、転動体9、9が上記内輪7aの外周面に設けた内輪軌道8から外れない様にする為、上記内輪7aの内端部で第二の内輪軌道8bから軸方向に外れた部分には、十分に大きな外径を有する肩部70を形成する必要がある。一方、上記内輪7aを含む回転輪の回転速度を検出する為には、上記エンコーダ3を構成する円輪部16と挿入部40の先端面とを対向させる必要がある。上記エンコーダを構成する円筒部15を上記肩部70自体に外嵌すると、上記円輪部16の直径が必要以上に大きくなり、この円輪部16と対向するセンサユニット39aを支持固定するカバー18dの直径も必要以上に大きくなる場合がある。これに対して、上述の様な段部69を設け、この段部69に上記エンコーダ3を外嵌固定すれば、このエンコーダ3やカバー18dの直径が必要以上に大きくなる事を防止できて、小型の回転速度検出装置付背面組み合わせ型転がり軸受ユニットの実現に寄与できる。この様な構造は、本例に限らず、他の実施の形態にも適用できる事は勿論である。
【0051】
更に、図示の例の場合には、前記ハブ2aの内端部に円筒部71を形成し、この円筒部71の先端部で上記内輪7aの内端面から突出した部分を直径方向外方にかしめ広げる事により、上記内輪7aを上記ハブ2aに対し結合固定している。この様な構造を採用すれば、前述の図59に示した従来構造、或は図1に示した実施の形態の第1例の様に、ナットにより内輪とハブとを結合固定する構造に比べて、部品点数の減少と組立の手間の軽減とにより、コスト削減を図れる。尚、上記円筒部71の先端部を直径方向外方にかしめ広げる際、上記内輪7aの一部には直径方向外方に向いた力が加わる。この荷重が大きい場合、上記第二の内輪軌道8bの直径が変化し、転動体9、9に付与した予圧が変化する事が考えられる。但し、本例の場合には、上記かしめ広げに伴う力は、上記段部69が受け、上記第二の内輪軌道8b部分にはこの力は殆ど加わらない。従って、上記予圧が変化する事は殆どない。この様な構造も、他の実施の形態にも適用できる。
【0052】
尚、本例の場合には、エンコーダ3として磁性材製で円輪部16に複数のスリット状の透孔17を形成したものを使用した例に就いて説明した。従って、前記センサユニット39aに組み込むセンサの構造も、エンコーダとして永久磁石を使用するものとは異ならせている。尚、上記センサにMR素子を使用する場合には、このMR素子の配列方向を、上記透孔17の長手方向(上記円輪部16の直径方向)との関係で規制する必要がある。本例の場合には、前記各抑え部50a、50aと前記各抑え溝54a、54aとの係合により、前記カバー18dに対する上記センサユニット39aの方向を規制できるので、特に別途位置決め手段を設けなくても、上記MR素子の配列方向を上記透孔17の長手方向との関係で規制できる。
【0053】
次に、図17〜20は、本発明の実施の形態の第5例を示している。本例の場合には、カバー18eに設けた係止筒44dの一部で直径方向反対側位置に、それぞれがスリット状で上記係止筒44dの内外両周面同士を連通させる1対の係止孔75、75を形成している。一方、センサユニット39bを構成する挿入部40の一部で直径方向反対側位置には係止溝76、76を、それぞれ設けている。そして、上記センサユニット39bの基端部(図17、19の右端部)に設けた鍔部41bと上記係止筒44dの先端面とを当接させた状態で、上記各係止孔75、75と係止溝76、76とが、軸方向に亙り少しだけずれた状態で、互いにほぼ整合する様にしている。即ち、この状態では、上記各係止溝76、76が上記各係止孔75、75よりも少しだけ上記係止筒44dの先端面寄り(図17〜18の右寄り)に存在する様に、各部の寸法を規制している。
【0054】
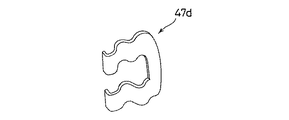
上述の様なカバー18eに形成した係止筒44dにセンサユニット39bを結合固定する為の結合ばね47dは、図20に示す様な、全体がU字形、コ字形、若しくは欠円環状で波形の板ばねとしている。上記係止筒44dにセンサユニット39bを結合固定する際には、先ず、上記センサユニット39bを構成する挿入部40を上記係止筒44dに挿入し、この係止筒44dの先端面と上記鍔部41bとを当接させると共に、上記各係止孔75、75と係止溝76、76とを部分的に整合させる。そして、この状態で、これら各係止孔75、75と係止溝76、76との間に上記結合ばね47dを、この結合ばね47dの厚さ寸法を弾性的に縮めつつ挿入する。これら各係止孔75、75と係止溝76、76との間に挿入された上記結合ばね47dは、上記各係止孔75、75の先端側内側面77、77と、上記各係止溝76、76の先端側内側面78、78との間で突っ張り、上記センサユニット39bの挿入部40に、上記係止筒44dの内側に引き込む方向の弾力を付与する。この様な本例の構造の場合も、センサユニット39bを、上記カバー18eに着脱する作業に要する手間を軽減して、回転速度検出装置付背面組み合わせ型転がり軸受ユニット自体のコスト、並びに修理に要するコストの低減を図れる。
【0055】
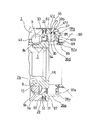
次に、図21〜24は、本発明の実施の形態の第6例を示している。上述した各例が何れも、非駆動輪(FF車の後輪、FR車の前輪)を支持する為の転がり軸受ユニットを対象としていたのに対して、本例並びに後述する第7例の場合には、駆動輪(FF車の前輪、FR車の後輪、4WD車の全輪)を支持する為の転がり軸受ユニットを対象としている。この為に本例の場合には、ハブ2bとして、内側に等速ジョイントの軸を挿通自在なスプライン孔79を有する円筒状のものを使用している。又、上記等速ジョイントとの干渉を防止する為、カバー18fを円環状に形成し、センサユニット39cを、このカバー18fの直径方向に配置している。
【0056】
この為に本例の場合には、上記カバー18fの外面の一部に庇状の取付フランジ部80を形成し、この取付フランジ部80に挿入孔38aを、上記カバー18fの直径方向に亙り形成している。本例の場合、この挿入孔38aの断面形状は四角形としている。又、上記取付フランジ部80の先端部内周側面には係止溝48aを、上記取付フランジ80の基端部には係止孔81を、それぞれ上記カバー18fの円周方向に亙り形成している。又、上記センサユニット39cは、上記挿入孔38a内にがたつきなく挿入自在とすべく、断面形状を四角形とした挿入部40aと、この挿入部40aの基端部に設けた外向フランジ状の鍔部41とを備える。そして、この鍔部41の基端面に、前述した第1例の場合と同様の、抑え溝54及び傾斜面57を形成している。エンコーダ3aを構成する永久磁石35の内側面と対向する検出部は、上記挿入部40aの先端部外側面(図21の下端部左側面)に設けている。
【0057】
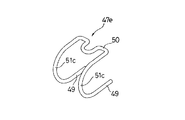
一方、上記取付フランジ部80に上記センサユニット39cを結合固定する為の結合ばね47eは、1対の係止脚部49、49と、これら1対の係止脚部49、49同士の間に掛け渡す様にして設けた抑え部50とを備える。この抑え部50の両端部と上記1対の係止脚部49、49の一端部とは、湾曲した連結部51c、51cにより連結している。これら各連結部51c、51cは、自由状態で上記抑え部50の両端部と上記1対の係止脚部49、49とを近づけ合う方向の弾力を有する。又、上記各係止脚部49、49は、それぞれの先端部まで直線状に形成している。
【0058】
上述の様に構成する取付フランジ部80に上記センサユニット39cを、やはり上述した様に構成する結合ばね47eを使用して保持固定するには、この結合ばね47eを外した状態で、上記センサユニット39cの挿入部40aを上記取付フランジ部80の挿入孔38a内に、直径方向外方から内方に挿入する。そして、上記鍔部41を上記取付フランジ部80の外周側面に当接させる。次いで、上記結合ばね47eを構成する1対の係止脚部49、49と抑え部50との間隔を広げつつ、これら係止脚部49、49を前記係止溝48a及び係止孔81に係合若しくは挿入すると共に、抑え部50を上記鍔部41の基端面に乗り上げさせる。そして、この抑え部50と、上記鍔部41の基端面に形成した抑え溝54とを係合させる。
【0059】
この様な本例の構造の場合も、上記センサユニット39cを、上記カバー18fに着脱する作業に要する手間を軽減して、回転速度検出装置付背面組み合わせ型転がり軸受ユニット自体のコスト、並びに修理に要するコストの低減を図れる。尚、本例の構造の場合には、外輪1の内端部内周面にシールリング82を内嵌固定し、このシールリング82と前記エンコーダ3aを構成する支持環34とにより組み合わせシールリングを構成し、転動体9、9を設置した空間43内への異物進入防止を図っている。
【0060】
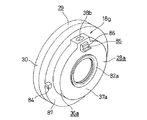
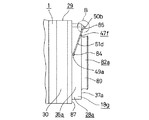
次に、図25〜30は、本発明の実施の形態の第7例を示している。本例の場合には、カバー18gを構成する合成樹脂製の本体28aを、全周に亙って断面L字形に形成している。そして、このカバー18gを構成する円筒壁部36aの一部を厚肉にして、この厚肉部分に挿入孔38bを、上記カバー18gの直径方向に亙り形成している。本例の場合、この挿入孔38b、及び、センサユニット39dを構成してこの挿入孔38b内に挿入される挿入部40bの断面形状は、それぞれ円形としている。
【0061】
この様に、挿入孔38b及び挿入部40bの断面形状を円形とする代わりに、本例の場合には、上記センサユニット39dの基端部に設けた鍔部41cと、上記カバー18gの円筒壁部36aの中間部に形成した段部87との係合により、上記センサユニット39dの回り止めを図っている。即ち、上記鍔部41cの形状を略D字形にして、この鍔部41cの外周縁の一部に平坦面83を形成すると共に、上記挿入部40bを上記挿入孔38b内に挿入した状態で、上記段部87と上記平坦面83とを密接若しくは近接させている。本例の場合、この様な平坦面83を設ける事により、上記センサユニット39dの回り止めを図ると同時に、このセンサユニット39dを設置する為に必要な軸方向(図25の左右方向)寸法の節減図っている。又、上述の様な鍔部41cの基端面には、前述した第1〜3例及び上述した第6例の場合と同様の抑え溝54及び傾斜面57を形成している。上記センサユニット39dを上記カバー18gに結合固定した状態では、次述する結合ばね47fの抑え部50bが上記抑え溝54と係合し、上記鍔部41cを上記円筒壁部36aの外周面に抑え付ける。
【0062】
本例に使用する結合ばね47fは、中央部に設けた上記抑え部50bと、両端部に設けた枢軸状の係止脚部49a、49aとを、略四分円状の連結部51d、51dにより連結して成る。上記各係止脚部49a、49aは、上記結合ばね47fの両端部である上記各連結部51d、51dの端部から、互いに逆方向に折れ曲がったもので、互いに同軸上に配置している。この様な上記各係止脚部49a、49aを枢支すべく、上記カバー18gの段部87の外面の一部で、上記挿入孔38bを中心として直径方向反対側2個所位置には、それぞれ鉤状の枢支部84を形成している。上記結合ばね47fの自由状態での、上記各係止脚部49a、49aの先端同士の間隔D49a は、上記1対の枢支部84同士の間隔D84(図示せず)よりも十分に大きく(D49a >D84)している。又、これら各枢支部84は、上記挿入孔38bと反対側のみが開口している。従って上記各係止脚部49a、49aを上記各枢支部84に係止した状態では、これら各係止脚部49a、49aが上記挿入孔38b側にずれる事はない。尚、上記各係止脚部49a、49aを枢支する為の枢支部は、図示の様な鉤形に限らず、門形、孔形等にする事もできる。
【0063】
又、上記カバー18gの底板部37aの一部外面で上記挿入孔38bに整合する部分には、上記抑え部50bを係止しておく為の係止フック85を、上記カバー18gを合成樹脂により射出成形する際、一体に形成している。上記結合ばね47fは、転がり軸受ユニットを造るメーカーで、図29に示した状態に、上記カバー18gに装着しておく。即ち、上記各係止脚部49a、49aを上記各枢支部84に係止すると共に、上記抑え部50bを係止フック85に係止しておく。この状態で上記抑え部50bは、上記挿入孔38bの開口部から退避して、前記センサユニット39dを構成する挿入部40bをこの挿入孔38b内に挿入する事に対する妨げとはならない。又、この様な状態で、上記結合ばね47fは、上記カバー18gの外周面から直径方向外方に突出する事がない。この為、この結合ばね47fが、上記カバー18gを図示しないナックルの支持孔に挿入しつつ、回転速度検出装置付背面組み合わせ型転がり軸受ユニットを自動車の懸架装置に支持する作業の妨げとなる事もない。尚、上記係止フック85の一部には傾斜縁86を形成して、上記抑え部50bをこの係止フック85に係止する作業を容易に行なえる様にしている。尚、図示の例では、上記係止フック85と上記結合ばね47fのU字形の湾曲部52aとを係合させる様にしている。但し、係止フックには、上記湾曲部52aを挟む状態で設けた、1対の直線部53a、53aを係合させる様にする事も可能である。この場合、係止フックを、間隔をあけて1対設ける。
【0064】
前述の様に構成するカバー18gを構成する円筒壁部36aに上記センサユニット39dを、やはり上述した様に構成する結合ばね47fを使用して保持固定する際には、この結合ばね47fの抑え部50bを図29に示す様に、上記挿入孔38bから退避させておく。そして、この状態で、上記センサユニット39dの挿入部40bを上記円筒壁部36aに形成した挿入孔38bに、直径方向外方から内方に挿通する。そして、前記鍔部41cを上記円筒壁部36aの厚肉部分の外周面に当接させると共に、前記段部87と前記平坦面83とを密接若しくは近接させる。次いで、上記結合ばね47fの抑え部50bを上記係止フック85から外し、この結合ばね47fを上記各係止脚部49a、49aを中心として、図29の反時計方向に揺動させ、上記抑え部50bを前記鍔部41cの基端面に乗り上げさせる。そして、この抑え部50bと、上記鍔部41cの基端面に形成した抑え溝54とを係合させる。
【0065】
この様な本例の構造の場合も、上記センサユニット39dを、上記カバー18gに着脱する作業に要する手間を軽減して、回転速度検出装置付背面組み合わせ型転がり軸受ユニット自体のコスト、並びに修理に要するコストの低減を図れる。尚、本例の構造の場合には、上記カバー18gを構成する円輪状の底板部37aの内周縁にシールリング82aを構成する芯金88の外径側半部を包埋し、この芯金88の内周縁部に全周に亙って添着したシールリップ89の先端縁を、等速ジョイント90の外周面に摺接させている。本例の場合には、このシールリップ89が、転動体9、9を設置した空間43内への異物進入防止を図っている。従って、エンコーダ3a部分にも、異物が入り込む事はない。
【0066】
次に、図31〜32は、本発明の実施の形態の第8例を示している。本例の場合には、結合ばね47gの各係止脚部49b、49bを枢支する為の枢支部84aを、カバー18hの段部87の直径方向反対側2個所位置に設けた突出部91により構成している。そして、これら各突出部91同士の互いに反対側の面に、上記カバー18hの内周面にまで貫通しない(有底の)凹孔92を、互いに同心に設けている。又、本例に使用する上記結合ばね47bは、図32に示す様に、抑え部50bの両端から連続した連結部51e、51eの先端部に設けた1対の係止脚部49b、49b同士を、互いに近づく方向に折り曲げて成る。これら1対の係止脚部49b、49bは、互いに同軸上に配置している。そして、上記各枢支部84aの凹孔92に上記各係止脚部49b、49bを係止し、上記カバー18hに対して上記結合ばね47fを、上記1対の係止脚部49b、49bを中心とする揺動自在に支持する。上記各係止脚部49b、49bが上記各枢支部84aから外れない様にする為、上記結合ばね47fの自由状態での、上記各係止脚部49b、49bの先端同士の間隔D49b は、上記1対の枢支部84a同士の間隔D84a (図示せず)よりも十分に小さく(D49b <D84a )している。又、上記結合ばね47fの連結部51e、51eは、短い全長でも必要な弾力を持たせる為、蛇行した形状としている。その他の構成及び作用に就いては、上述した第7例と同様である為、同等部分には同一符号を付して、重複する図示並びに説明は省略する。
【0067】
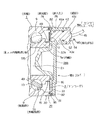
次に、図33〜39は、本発明の実施の形態の第9例を示している。静止輪である外輪1の内端(図33の右端)開口部は、カバー18iにより塞いでいる。このカバー18iは、前述した第1例の構造に組み込んだカバー18aと同様に、合成樹脂を射出成形して成る有底円筒状の本体28bと、この本体28bの開口部に結合した嵌合筒29とから成る。又、ハブ2aと共に回転輪を構成する内輪7aは、前述の図12に示した第4例と同様に、このハブ2aの内端部に外嵌し、更にこのハブ2aの一部を直径方向外方にかしめ広げる事により、このハブ2aに対し固定している。この様な内輪7aの内端部(図33の右端部)に形成した段部69には、前述の図59〜60に示した従来構造の場合と同様のエンコーダ3を外嵌固定している。
【0068】
又、上記カバー18iを構成する本体28bの底板部37bの一部で、上記エンコーダ3を構成する円輪部16の内側面と対向する部分には挿入孔38を、上記底板部37bを貫通させる状態で、上記外輪1の軸方向に亙り形成している。又、上記底板部37bの外面(上記カバー18iにより塞ぐべき、転動体9、9を設置した空間43と反対側の側面で、図33の右側面)の一部で、上記挿入孔38の開口周囲部分には、係止筒44eを設けて、上記挿入孔38の内周面と共に、単一円筒面を構成している。そして、これら挿入孔38及び係止筒44e内に、前述の第1例に組み込んだセンサユニット39(図1、3)と同様のセンサユニット39eの先端寄り部分を挿入している。
【0069】
一方、上記係止筒44eの基端寄り(図34、37、38、39の左端寄り)部分で、この係止筒44eの直径方向ほぼ反対側位置には1対の枢支孔93を、互いに同心に形成している。これら各枢支孔93は、上記係止筒44eの内周面にまでは貫通させていない。この理由は、これら各枢支孔93を通じて、上記係止筒44e内に異物が入り込むのを防止する為である。更に、前記底板部37bの外面で上記係止筒44eの外周面の近傍位置には、抜け止め手段を構成する1対のストッパプレート94を、前記カバー18iと一体に設けている。尚、これら両ストッパプレート94、94の形成位置は、上記各枢支孔93の延長上から外れた位置としている。図示の例では、これら両枢支孔93を、上記係止筒44eの直径方向反対位置よりも少しカバー18iの直径方向外方(図34、37、38、39の上方)に少しだけずれた位置に形成している。これに対して、上記両ストッパプレート94を、上記係止筒44eの直径方向反対位置に設けている。又、上記両ストッパプレート94の互いに対向する側の端縁と、上記係止筒44eの外周面との間には、次述する結合ばね95の基端寄り部分を挿入自在な隙間を設けている。
【0070】
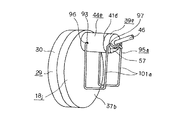
上記カバー18iに対して上記センサユニット39eを結合する為の結合ばね95の両端部には1対の枢支部96、96を、互いに同心に、それぞれの先端面同士を互いに対向させた状態で設けている。又、上記結合ばね95の中間部には、前記センサユニット39eに設けた鍔部41dを、上記係止筒44eの開口端面に向け押圧する為の抑え部97を設けている。この抑え部97は、上記結合ばね95を構成する線材を曲げ形成して成り、両端に設けた互いに同心の直線部98、98と、これら両直線部98、98同士の間に存在する、略半円弧形の湾曲部99とを備える。又、この湾曲部99の中間部には、上記枢支部96、96とは反対側に向け折れ曲がった摘み部100を設けている。この摘み部100は、後述するカバー18iへのセンサユニット39eの着脱作業の為、上記抑え部97を上記鍔部41dに対して進退させる際に、手指を掛ける為の手掛かりとして利用する。この為に上記摘み部100の幅W100 (図36)は、手の親指を掛け易い大きさ(例えば15mm以下)に規制している。更に、上記抑え部97の両端部と上記各枢支部96、96とは、それぞれ弾性変形部101、101により互いに連続させている。これら両弾性変形部101、101は、上記線材を曲げる事により、「く」字形或は円弧形に形成したもので、全長を縮める方向の弾性を有する。
【0071】
一方、前記センサユニット39eに設けた上記鍔部41dの基端面(挿入部40cと反対側の面で、図33、34、39の右端面)には、上記結合ばね95の抑え部97をがたつきなく係合させる為、前述した第1例の場合と同様の抑え溝54と傾斜面57とを形成している。
【0072】
それぞれが上述の様に構成される各部材を組み合わせて、本例の回転速度検出装置付背面組み合わせ型転がり軸受ユニットを構成すべく、上記センサユニット39eを前記カバー18iに装着する作業は、次の様にして行なう。先ず、これらセンサユニット39eとカバー18iとを組み合わせるのに先立って、このカバー18iに設けた係止筒44eに、上記結合ばね95を装着しておく。この装着作業は、先ず、図37に示す様に、結合ばね95全体を、上記カバー18iの直径方向外方寄りで前記両ストッパプレート94よりも直径方向外側部分に位置させた状態で行なう。この状態で、前記1対の枢支部96、96同士の間隔を弾性的に広げて、これら両枢支部96、96と前記両枢支孔93とを整合させ、これら両枢支部96、96を両枢支孔93内に挿入する。この際、上記両ストッパプレート94は、上記両枢支部96、96を両枢支孔93内に挿入する作業の妨げとはならない。
【0073】
上述の様にして、上記結合ばね95の基端部(上記両枢支部96、96を設置した端部)を上記係止筒44eに枢支したならば、上記結合ばね95を上記両枢支部96、96を中心に、図38に示す状態にまで揺動させる。即ち、上記結合ばね95を構成する弾性変形部101、101の一部が上記カバー18iを構成する本体28bの底板部37bの外面に当たるまで上記結合ばね95を揺動させ、上記両弾性変形部101、101の基端寄り部分を、上記係止筒44eの外周面と上記両ストッパプレート94の端縁との間に位置させる。この状態で、上記抑え部97は、上記係止筒44eの先端開口周囲部分から完全に退避して、次述するセンサユニット39eとカバー18iとの組み合わせ作業時に、上記センサユニット39eの一部と上記抑え部97とが干渉する事を防止する。尚、上記係止筒44eは、上記カバー18iの上端寄り部分に設ける為、結合ばね95は、重力により図38に示した状態で安定する。この状態では、上記結合ばね95が、ナックルの一部と干渉する事はなく、上記カバー18i及び結合ばね95を装着した外輪1を、このナックルに設けた取付孔に挿入可能になる。従って、上記カバー18iに結合ばね95を装着した状態で自動車の組立メーカーに納入すれば、この組立メーカーで、上記結合ばね95をカバー18iに装着する作業を省略できる。
【0074】
上記カバー18iに上記センサユニット39eを結合固定するには、上述の様にして上記結合ばね95を上記係止筒44eに装着し、この結合ばね95を図38に示した位置にまで揺動させた状態で、上記センサユニット39eの先端寄り部分である挿入部40cを、上記係止筒44e及び前記挿入孔38に挿入する。そして、前記鍔部41dを上記係止筒44eの先端面に当接させる。この状態で、上記センサユニット39eを構成する挿入部40cの先端面に設けた検知部24と前記エンコーダ3を構成する円輪部16の内側面との間に、所望の厚さ寸法(例えば0.5mm程度)の微小隙間が存在する。次いで、上記結合ばね95を、上記1対の枢支部96、96を中心に、上記抑え部97を上記鍔部41dに近づける方向に揺動させる。そして、上記抑え部97を、図39に示す状態を経て、図33〜34に示す様に、上記鍔部41dの基端面に乗り上げさせ、上記鍔部41dを上記係止筒44eの先端面に押圧する。この状態で、上記抑え部97が、上記鍔部41dの基端面に形成した抑え溝54に係合する。
【0075】
上述の様に、上記結合ばね95の抑え部97を上記鍔部41dの基端面に乗り上げさせる作業は、前記摘み部100を手指により押圧する事により行なう。この摘み部100を上記鍔部41dに向け押圧する事に伴い、上記抑え部97の両端部に設けた直線部98、98が、上記鍔部41dに形成した前記傾斜面57に乗り上げる。この状態から更に上記摘み部100を押圧する作業を継続すれば、上記抑え部97が上記鍔部41dの基端面に形成した抑え溝54に係合する。この様に抑え部97と抑え溝54とが係合した状態で、前記1対の弾性変形部101、101は、弾性的に全長が伸ばされた状態となる。従って、上記抑え部97は、これら1対の弾性変形部101、101の弾性復元力に基づき、上記鍔部41dを上記係止筒44eの先端面に向け弾性的に押圧する。尚、この作業を容易に行なえる様にすべく、上記結合ばね95を自由状態のまま上記各枢支部96、96を中心に回動させた場合に、上記各直線部98、98が上記傾斜面57に当接する様に、上記結合ばね95の寸法を規制している。又、上述の様に、結合ばね95を係止筒44eに対して揺動変位させる際に、上記各弾性変形部101、101とこの係止筒44eの外周面及び上記鍔部41dの外周縁とが干渉しない様に、これら1対の弾性変形部101、101の間隔は、上記係止筒44e及び鍔部41dの外径よりも少し大きくしておく。
【0076】
上述の様にして、上記抑え部97が抑え溝54に係合した状態では、上記結合ばね95が上記鍔部41dを上記係止筒44eの先端面に向け、十分に大きな力で押し付けて、上記センサユニット39eを上記カバー18iに結合する。又、この状態では、上記各弾性変形部101、101の一部で前記各枢支部96、96の近傍部分が、前記1対のストッパプレート94の端縁に当接若しくは近接する。従って、上記各弾性変形部101、101の基端部同士の間隔が広がる方向に弾性変形する事は殆どなく、上記各枢支部96、96が前記各枢支孔93から抜け出る事はなくなる。この結果、走行時の飛び石等が上記結合ばね95に勢い良く衝突した場合等、上記各弾性変形部101、101に外力が作用した場合でも、上記各枢支部96、96が上記各枢支孔93から抜け出る事はなくなり、上記センサユニット39eが上記カバー18iとの結合部から不用意に外れる事がなくなる。
【0077】
上記センサユニット39eを上記カバー18iから取り外す際には、上述した装着作業の場合とは逆に、先ず、前記摘み部100に手指を掛けて、上記結合ばね95の抑え部97を上記鍔部41dの基端面から退避させる。この様にして上記抑え部97を鍔部41dから退避させた後、上記センサユニット39eの挿入部40cを、前記挿入孔38及び係止筒44eの内側から抜き取る。
【0078】
次に、図40は、本発明の実施の形態の第10例を示している。本例の場合には、ストッパプレート94、94の互いに対向する端縁で、カバー18iを構成する本体28bの底板部37bの外面(図40の上面)から少し離れた部分に、それぞれ係止突起102、102を形成している。そして、これら各係止突起102、102の先端同士の間隔D102 を、自由状態に於ける結合ばね95の弾性変形部101、101の外側縁同士の間隔D101 よりも小さく(D102 <D101 )している。従って、本例の場合には、前述の図38に示す様に、抑え部97を係止筒44eの先端開口部分から退避する方向に揺動させた状態で、上記カバー18iの姿勢に関係なく、上記結合ばね95とカバー18iとの位置関係を一定にできる。この為、カバー18iを装着した転がり軸受ユニットを組み立てたメーカーから、センサユニットを装着する自動車の組立メーカーに納入する過程で、上記結合ばね95の位置関係がずれ動かない様にして、自動車の組立メーカーでの組立作業の能率化を図れる。
【0079】
次に、図41は、本発明の実施の形態の第11例を示している。本例の場合には、結合ばね95aを構成する線材の径を太くしても必要とする弾性を得られる様に、1対の弾性変形部101a、101aの全長を長くして、これら各弾性変形部101a、101aの曲がり量を多くしている。即ち、本例の回転速度検出装置付背面組み合わせ型転がり軸受ユニットに組み付ける結合ばね95aは、泥水や融雪剤等が付着する可能性が高い為、錆び易い状況にある。ステンレスのばね鋼により造る場合には、特に上記線材の径を太くしなくても必要とする耐久性を確保する事は容易であるが、比較的安価な非ステンレス鋼である、通常のばね鋼を使用した場合には、表面に亜鉛メッキやクロムメッキを施したとしても、必要とする耐久性を確保する為には、上記線材の径を太くする必要が生じる。これに対し、この径を太くすると、結合ばね95aの剛性が高く(ばね常数が大きく)なり過ぎて、抑え部97を鍔部41d(図39参照)に乗り上げさせる事が困難になる。これらの事を考慮すると、上記結合ばね95aを構成する線材の径は1〜2mm程度が適当である。但し、この径を2mm程度にした場合には、前述の図35に示した様な結合ばね95の形状では、この結合ばね95の剛性が高くなり過ぎる。そこで、上記径を太くした場合には、本例の様に、1対の弾性変形部101a、101aの全長を長くして曲がり量を多くし、必要とする弾性を確保する。
【0080】
尚、前述した第9〜11例の回転速度検出装置自体の構造に関しては、パッシブ型磁気センサを使用したものに限らず、アクティブ型磁気センサを使用するものを採用する事もできる。尚、アクティブ型磁気センサを用いたものは、センサユニット全体を小型且つ軽量にできる。従って、慣性質量が小さく、自動車走行に伴う振動による運動エネルギも小さくて済む。この結果、結合ばね95に要求される抑え荷重を小さくすることができて、上述の様な細い(1〜2mm程度)線材を用いた結合ばね95の使用が可能になる。
【0081】
次に、図46〜50は、本発明の実施の形態の第12例を示している。本例は、前述した第11例の構造に於いて新たに生じる問題を解消すべく考えたものである。即ち、前述した第11例で示した結合ばね95aは、錆び易い状況にある結合ばね95aの耐久性を確保する為、線材の径を太くする代りに、この結合ばね95aを構成する1対の弾性変形部101a、101aの全長を長くして曲がり量を多くしている。
【0082】
又、上記結合ばね95aを構成する線材の径を太くしたり、この線材の材料を変更したりする等により剛性を上げると共に、上記1対の弾性変形部101a、101aの全長を長くすれば、上記結合ばね95aと、この結合ばね95aと係合するカバー18i又はセンサユニット39eとの係合部分に寸法誤差があった場合に、この寸法誤差を有効に吸収する事ができる。即ち、結合ばね95aを、剛性の高い材料により造ると共に弾性変形部101a、101aの全長を長くすれば、この結合ばね95aにより上記センサユニット39eを抑え付ける荷重を適正範囲に保持すると共に、この結合ばね95aに加わる応力を許容値内に収めつつ、上記寸法誤差を吸収できる。これに対して、上記1対の弾性変形部101a、101aの全長を短くしたまま、上記線材の剛性を下げて所定の弾性変形量を確保する事により、上記寸法誤差を吸収する事もできるが、上記係合部分の寸法誤差に拘らず、上記結合ばね95aにより上記センサユニット95aを抑え付ける荷重を適正に保持したり、この結合ばね95aに加わる応力を許容値内に収める事が難しくなる。従って、この様な理由からも、上記1対の弾性変形部101a、101aの全長を長くする事が好ましい場合が生じる。
【0083】
ところが、単にこれら1対の弾性変形部101a、101aを長くすると、図42〜43に示す様に、センサユニット95aを係止筒44eに抜き差しすべく、1対の枢支孔93に枢支した1対の枢支部96を中心として、上記結合ばね95aを揺動させても、上記1対の弾性変形部101a、101aの一部が上記カバー18jの底板部37bの側面に当接して、この結合ばね95aの揺動が制限され、この結合ばね95の抑え部97が上記係止筒44eの開口部から退避し切れない場合が生じる。この様に抑え部97が係止筒44eの開口部から退避し切れなかった場合に、この抑え部97が、上記センサユニット95aを上記カバー18jに着脱する妨げとなる。
【0084】
一方、この様な弊害をなくすべく、図44〜45に示す様に、枢支孔93とカバー18kの底板部37bの側面との間の軸方向距離L93を十分に確保して、上記抑え部97が係止筒44fの開口部から退避し切るまで、上記結合ばね95aを揺動自在とする構造も考えられる。但し、この様な構造では、上記枢支孔93を設けた係止筒44fの軸方向長さが大きくなり、回転速度検出装置付背面組み合わせ型転がり軸受ユニットの小型化を図りにくくなる。
図46〜50に示した第12例の回転速度検出装置付背面組み合わせ型転がり軸受ユニットは、上述の様な不都合を解消すべく、結合ばねの全長を十分に長くしても、カバーに対するセンサユニットの着脱性を良好なままにできる構造を実現すべく考えたものである。
【0085】
本例の回転速度検出装置付背面組み合わせ型転がり軸受ユニットの特徴は、結合ばね95bの全長を十分に長くしても、カバー18jに対するセンサユニット39eの着脱性を良好なままにできる構造にある。その他の部分の構成及び作用に就いては、前述した図33〜39、41に示した第9、11例と同様である為、同等部分に関する説明並びに図示は、省略若しくは簡略にする。尚、本例では第9、11例の様に、結合ばね95aの枢支部96がカバー18jに設けた枢支孔93から抜け出すのを防止する為のストッパプレート94(図34、37、38、39)は設けていないが、必要とすれば設ける事もできる。
【0086】
外輪1(図33参照)の内端開口部を塞ぐカバー18jの底板部37bの側面の一部には、軸方向(図46、47の左右方向)に突出する状態で係止筒44eを設けている。そして、この係止筒44eの外周面で直径方向ほぼ反対側2箇所位置に、内周面にまで貫通しない1対の枢支孔93を互いに同心に設け、これら各枢支孔93に、弾性部材である結合ばね95bの両端部に設けた1対の枢支部96を枢支自在としている。上記結合ばね95aは、図48〜50に示す様に、両端部に互いに同心である1対の枢支部96、96を、中間部に上記センサユニット39eの基端部に設けた鍔部41dを上記係止筒44eの開口周縁部に押圧する抑え部97を、これら1対の枢支部96、96の一端と抑え部97の両端との間に、連結部である1対の弾性変形部101b、101bをそれぞれ設けている。これら1対の弾性変形部101b、101bは、上記枢支部96、96の一端から連続した1対の第一の直線部103、103と、上記抑え部97の両端から連続した1対の第二の直線部104、104と、これら第一、第二の直線部103、104同士を連結する1対の曲線部105、105とから成る。上記1対の弾性変形部101b、101bの全長は、前述した理由、即ち、上記結合ばね95bの耐久性を確保すると共に、この結合ばね95bと係合する各部材との寸法誤差を有効に吸収する為、十分に長くしている。
【0087】
特に、本例の場合には、上記1対の弾性変形部101b、101bを、上記抑え部97が上記センサユニット39eを上記挿入孔38の開口周縁部に押圧した状態で、前記カバー18jの底板部37bに対して、上記各曲線部105、105に向う程この底板部37bから離れる方向に傾斜させている。即ち、上記弾性変形部101b、101b全体を、上記1対の枢支孔93を含み、且つ上記カバー18jの底板部37bの側面と平行な仮想平面β(図47)よりも、上記挿入孔38の開口側(図46、47の右側)に位置させ、且つ、上記枢支孔93から離れる程、上記仮想平面βから離れる方向に傾斜させている。この構成により、センサユニット39eを上記係止筒44eに抜き差しする事に対して、上記抑え部97が妨げとならない状態にまで、上記結合ばね95bを揺動自在としている。この為に、この結合ばね95bの抑え部97を上記センサユニット39eの鍔部41dに係合した状態で、上記各弾性変形部101b、101bを構成する、上記底板部37b寄り部分である第一の直線部103、103と、上記仮想平面βとのなす角度γを、設計的に定まる所定値以上としている。即ち、この角度γは、上記結合ばね95bを上記枢支部96、96を中心として図47の時計方向に揺動させて、上記各弾性変形部101b、101bの一部を上記底板部37bの一部に当接させた場合に、上記抑え部97が、上記係止筒44eの開口部から退避し切って(前記係止筒44eの外周面を延長して得られる仮想空間外に退避させて)、この抑え部97が上記センサユニット39eを上記係止筒44eに抜き差しする作業の妨げとならない角度以上としている。
【0088】
上述の様に構成する本例の回転速度検出装置付背面組み合わせ型転がり軸受ユニットの場合も、前述した各例と同様に、上記センサユニット39eを上記カバー18jに着脱する作業に要する手間を軽減して、回転速度検出装置付背面組み合わせ型転がり軸受ユニット自体のコスト、並びに修理に要するコストの低減を図れる。特に、本例の場合、結合ばね95bを構成する1対の弾性変形部101b、101bを傾斜させている。この為、前記各枢支孔93を上記底板部37bの近くに設けても、上記カバー18jに対してセンサユニット39eを着脱すべく、上記結合ばね95bを、上記弾性変形部101b、101bが上記挿入孔38の開口から遠ざかる方向に揺動させた際に、上記結合ばね95bが揺動できる角度を確保できる。従って、この結合ばね95bに設けた抑え部97が、上記センサユニット39eを上記カバー18jに対して着脱する作業の妨げとはならない。この結果、上記結合ばね95bの耐久性を確保すると共に、この結合ばね95bと係合する各部材との寸法誤差を有効に吸収すべく、この結合ばね95bの全長を十分に長くしても、上記係止筒44eの軸方向長さを徒に大きくする事なく、カバー18jに対するセンサユニット39eの着脱性を良好にしたままにできる。
【0089】
尚、本例の場合、上記結合ばね95bに設けた抑え部97の中間部に、この抑え部97を上記センサユニット39eの鍔部41dに係合させた状態で、この鍔部41dからほぼ垂直な方向に突出する摘み部106を設けている。カバー18jに対してセンサユニット39eを着脱する場合には、この摘み部106を摘む事により、上記結合ばね95bを容易に揺動させる事ができる。尚、この抑え部95bが上記センサユニット39eの抑え溝54に係合した状態では、この結合ばね95bの抑え部97が、上記鍔部41dを上記係止筒44eの端面に向け、十分に大きな力で押し付ける。この為、上記枢支部96と抑え部97の基端部との距離L97に対する、上記枢支部96と摘み部106の先端部との距離L106 の比(レバー比)は、ある程度大きく{例えばレバー比が2以上(L106 /L97≧2)に}する事が、上記結合ばね95bの揺動し易さを確保する点から好ましい。
【0090】
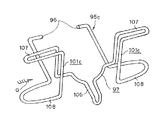
次に、図51〜53は、本発明の実施の形態の第13例を示している。本例の場合には、結合ばね95cの両端部に設けた1対の枢支部96、96と中間部に設けた抑え部97とを連結する、1対の弾性変形部101c、101cを、上記結合ばね95cに作用する曲げモーメントが最大となる部分で湾曲させて、これら各弾性変形部101c、101cの全長を長くしている。この様に各弾性変形部101c、101cの所定部位を長くしたのは、次の様な理由による。
【0091】
カスティリアーノの定理(Castigliano's theorem )によると、弾性体に作用する曲げモーメントが大きい断面部分の長さを長くすれば、この弾性体のたわみ量が大きくなる事が知られている。又、弾性体に作用する曲げモーメントを大きくし過ぎると、断面部分に作用する応力が許容応力を越えて、この弾性体が折れる可能性がある。従って、弾性体である、上記結合ばね95cに於いて、作用する曲げモーメントが最大になる部分の長さを長くすれば、より変形し易く、より折れにくい結合ばね95cを得る事ができる。本例の場合、結合ばね95cを揺動させる為に引っ張り荷重Pが働く部分は、結合ばね95cがカバー18j及びセンサユニット39eと係合する部分である、図53に示す点X、Yである。そして、上記結合ばね95cの曲げモーメントが最大に作用する部分は、点Xから最も離れた、距離L95部分、即ち、各弾性変形部101c、101cをそれぞれ構成する、第一の湾曲部107、107部分と第二の湾曲部108、108部分とである。従って、これら各湾曲部107、108の長さを長くする事により、より変形し易く、より折れにくい結合ばね95cを得る事ができる。尚、図示の例の様に、上記第一の湾曲部107、107と第二の湾曲部108、108とを、上記荷重Pの作用線の両側に配置したのは、上記結合ばね95cを上記カバー18jの外周縁よりも直径方向外方に突出させる事なく、上記第一、第二の湾曲部107、108の必要とする長さを確保する為である。その他の構成及び作用は、前述した第12例の場合と同様である。
【0092】
次に、図54〜58は、本発明の実施の形態の第14例を示している。回転速度検出装置付背面組み合わせ型転がり軸受ユニットの使用時には、自動車の走行に伴って、センサユニットをカバーに結合支持する結合ばねには、泥水や融雪剤等が付着する可能性が高い。そして、この結合ばねは金属製である為、上述の様に結合ばねに泥水等が付着すると、ばねの材質が、安価な非ステンレス鋼の場合には、早期に錆びる可能性がある。特に、この結合ばねの中間部に設けた抑え部がセンサユニットの鍔部と係合する部分に、上記泥水等が溜り易く、上記部分が特に早期に錆びる可能性がある。
本例の回転速度検出装置付背面組み合わせ型転がり軸受ユニットは、上述の様な事情に鑑みて、結合ばねの材質を安価な非ステンレス鋼とした場合でも、この結合ばねが錆びる事を防止すべく考えたものである。
【0093】
この様に、本例の回転速度検出装置付背面組み合わせ型転がり軸受ユニットの特徴は、結合ばねがセンサユニットと係合する部分を覆う構造にある。その他の部分の構成及び作用に就いては、前述した図46〜50に示した第12例と同様である為、同等部分には同一符号を付して、重複する説明並びに図示を省略若しくは簡略にする。尚、本例では、前述の第9〜10例の様に結合ばね95bの枢支部96がカバー18jに設けた枢支孔93から抜け出すのを防止する為のストッパプレート94(図34、37、38、39、40)は設けていない。但し、次述する被覆部材109との干渉を防止できる限り、上記ストッパプレート94を設けても良い。
【0094】
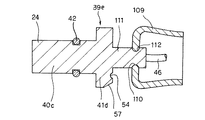
センサユニット39eの基端部中央に設けた円杆状の突部111の中間部外周面に、防水機能を有する被覆部材109を支持している。この被覆部材109は、ゴム、或はハイトレル等の合成樹脂等の弾性材から成る。又、この被覆部材109は、開口部を逆方向にすべく、反転自在な袋状としている。又、この被覆部材109の底部中央には、軸方向に貫通した貫通孔110を設けている。そして、上記突部111の中間部外周面に全周に亙り設けた係止溝112に、上記貫通孔110の内周縁部を係止している。又、上記センサユニット39eの内部に包埋したセンサ(図示せず)と連結したハーネス46は、上記突部111の先端面から導出している。
【0095】
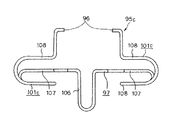
又、上記センサユニット39eを上記カバー18jに対して着脱自在とすべく、上記センサユニット39eの鍔部41dを上記挿入孔38の開口周縁部に押圧する結合ばね95bは、図58に示す様に、両端部に設けた1対の枢支部96、96と、中間部に設けた抑え部97と、これら枢支部96、96と抑え部97とを連結する1対の弾性変形部101b、101bとから成る。これら1対の弾性変形部101b、101bは、上記枢支部96、96の一端から連続した1対の第一の直線部103、103と、上記抑え部97の両端から連続した1対の第三の直線部113、113と、これら1対の第三の直線部113、113の一端から連続した、上記第一の直線部103、103とほぼ平行な第二の直線部104、104と、これら第一、第二の直線部103、104同士を連結する1対の曲線部105、105とから成る。
【0096】
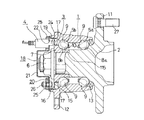
上述の様な被覆部材109を備えた本例の場合、この被覆部材109により、上記結合ばね95bの抑え部97と上記センサユニット39eとが係合する部分を覆っている。上記センサユニット39eをカバー18jに着脱する場合には、図55に示す様に、予め上記センサユニット39eに係止した被覆部材109を上記鍔部41dと反対側に開口させた状態にして、上記センサユニット39eと結合ばね95bとの係合作業の邪魔にならない様にしておく。この状態で、図56に示す様に、上記カバー18jに設けた係止筒44eの内側に上記センサユニット39eの挿入部40cを挿入する。そして、結合ばね95bを、上記係止筒44eに設けた枢支孔93に枢支した枢支部96、96を中心として揺動させて、この結合ばね95bに設けた抑え部97を、上記センサユニット39eの鍔部41dに設けた抑え溝54に係合させる。この部分の構成及び作用は、前述の図46〜50に示した第12例の場合とほぼ同様である。上記抑え部97と抑え溝54とを係合させた後、図54、57に示す様に、上記被覆部材109を反転させて、この被覆部材109の開口部を逆方向に向け、この被覆部材109の開口周縁部を上記係止筒44eの外周面に弾性的に当接させる。この状態で上記被覆部材109が、上記結合ばね95bに設けた抑え部97と上記センサユニット39eとが係合する部分を覆う。
【0097】
上述の様に構成する本例の回転速度検出装置付背面組み合わせ型転がり軸受ユニットによれば、この回転速度検出装置付背面組み合わせ型転がり軸受ユニットの使用時に、上記結合ばね95bと上記センサユニット39eとが係合する部分に、直接外部から泥水等がかかるのを防止して、上記結合ばね95bが錆びる事を防止できる。又、この様に上記結合ばね95bの一部を、被覆部材109により覆った状態では、上記被覆部材109を反転させない限り、上記結合ばね95bを上記センサユニット39eから外す事ができない。従って、前述の様なストッパプレート94(図37〜40)を設けなくても、上記センサユニット39eが上記カバー18jから不用意に外れる事を防止できる。
【0098】
尚、上記結合ばね95bを構成する第三の直線部113、113同士の間隔L113 (図58)は、これら第三の直線部113、113の自由状態で、上記係止筒44eの外径d44(図54)とほぼ等しいか、若干小さくしている。この理由は、上記被覆部材109により、上記結合ばね95bが上記センサユニット39eと係合する部分を覆った状態で、上記第三の直線部113、113が上記被覆部材109の開口部を内側から押し広げて、上記係合部分付近に泥水等が侵入し易くなるのを防止する為である。
【0099】
又、上記被覆部材109の開口周縁部は、上記係止筒44eの外周面に向け弾性的に当接させているが、上記結合ばね95bを構成する第三の直線部113、113の存在により、上記係止筒44eの外周面と上記被覆部材109との間には、互いに密接できない隙間が生じて、完全な密封状態とはできない。但し、車両への設置状態では、上記結合ばね95bが上記センサユニット39eを上記挿入孔38の開口周縁部に押圧した状態で、上記結合ばね95bを構成する第一、第二の直線部103、104と、上記曲線部105、105とを、上記抑え部97より下側に位置させる。言い換えれば、上記第三の直線部113、113を、上記抑え部97よりも上側に位置させない様にしている。これにより上記隙間の開口部は下方に向き、この隙間を通じて泥水等が侵入し、上記被覆部材109と係止筒44eの間部分に泥水等が溜る事を防止している。
【0100】
更に、本例の場合、上記係止筒44eに設けた枢支孔93の開口周辺部で、回転速度検出装置付背面組み合わせ型転がり軸受ユニットの使用時に上側に位置する部分に、1対の庇部114を設け、この底部114により、上記枢支部96、96と枢支孔93との間部分に泥水等が侵入する事を防止している。尚、上記庇部114を上記上側部分にのみ設けたのは、この底部114が上記結合ばね95bの揺動を妨げない様にする為である。尚、上記庇部114は、カバー18jを射出成形する際に、一体モールド成形により製造する事ができる為、その形成作業は容易である。
【0101】
尚、図示の例の場合、図54に示した様に、ハブ2の端部をかしめ広げる事により内輪7をハブ2に固定した、従動輪を支持する転がり軸受ユニットの構造に就いて適用した構造に就いて示したが、本例の回転速度検出装置付転がり軸受ユニットはこの様な構造に限定するものでなく、駆動輪を支持する転がり軸受ユニット等、他の構造に就いても適用できる。又、本例の回転速度検出装置付転がり軸受ユニットは、図示の例の様にセンサユニット39eの挿入方向をハブ2のアキシャル方向とした構造のみならず、ラジアル方向とした構造にも適用できる。
【0102】
【0103】
【図面の簡単な説明】
【図1】本発明の実施の形態の第1例を示す断面図。
【図2】カバーのみを取り出して示す斜視図。
【図3】ハーネスの端部及びセンサユニットのみを取り出して示す斜視図。
【図4】図1のA部を、カバーのみを取り出して示す断面図。
【図5】センサユニットとカバーとを結合する為の結合ばねの斜視図。
【図6】本発明の実施の形態の第2例を示す、カバーのみを取り出して見た正面図。
【図7】同じく図6の左方から見た図。
【図8】本発明の実施の形態の第2例に使用する結合ばねの斜視図。
【図9】本発明の実施の形態の第3例を示す、カバーのみを取り出して見た正面図。
【図10】同じく図9の左方から見た図。
【図11】本発明の実施の形態の第3例に使用する結合ばねの斜視図。
【図12】本発明の実施の形態の第4例を示す、図1の右部に相当する部分断面図。
【図13】同第4例に使用するカバーのみを取り出して示す斜視図。
【図14】同じくハーネスの端部及びセンサユニットのみを取り出して示す斜視図。
【図15】同じく1対の結合ばねのうちの一方の結合ばねのみを取り出して示す斜視図。
【図16】同じくカバーとセンサユニットとの結合部のみを示す拡大斜視図。
【図17】本発明の実施の形態の第5例を示す、図1の右部に相当する部分断面図。
【図18】同第5例に使用するカバーのみを取り出して示す部分斜視図。
【図19】同じくハーネスの端部及びセンサユニットのみを取り出して示す斜視図。
【図20】同じく結合ばねのみを取り出して示す斜視図。
【図21】本発明の実施の形態の第6例を示す断面図。
【図22】同じく第6例に使用するカバーのみを取り出して示す斜視図。
【図23】同じくハーネスの端部及びセンサユニットのみを取り出して示す斜視図。
【図24】同じく結合ばねのみを取り出して示す斜視図。
【図25】本発明の実施の形態の第7例を示す、回転速度検出装置付背面組み合わせ型転がり軸受ユニットの内半部の断面図。
【図26】同第7例に使用するカバーのみを取り出して示す斜視図。
【図27】同じくハーネスの端部及びセンサユニットのみを取り出して示す斜視図。
【図28】同じく結合ばねのみを取り出して示す斜視図。
【図29】同じくセンサユニットを未装着のカバーを、搬送する為の状態のまま外輪の端部に装着した状態で示す側面図。
【図30】図29のB部拡大図。
【図31】本発明の実施の形態の第8例に使用するカバーのみを取り出して示す斜視図。
【図32】同じく結合ばねのみを取り出して示す斜視図。
【図33】本発明の実施の形態の第9例を示す、図1の右部に相当する図。
【図34】センサユニットを取り付けたカバーを取り出して示す斜視図。
【図35】結合ばねのみを取り出して示す斜視図。
【図36】結合ばねの摘み部を示す、図35のC矢示図
【図37】カバーに結合ばねを装着する状態を示す部分斜視図。
【図38】カバーに結合ばねを装着した状態を示す部分斜視図。
【図39】結合ばねによりセンサユニットをカバーに抑え付ける作業の途中の状態を示す部分斜視図。
【図40】本発明の実施の形態の第10例を示す、図38のD−D断面に相当する図。
【図41】本発明の実施の形態の第11例を示す、結合ばねの斜視図。
【図42】同例の構造に於いて新たに生じる問題に就いて説明する為、センサユニットを取り付けたカバーを取り出した状態で示す斜視図。
【図43】同じくセンサユニットをカバーに着脱する為、カバーに枢支した結合ばねを揺動させた状態で示す斜視図。
【図44】同じく解決方法の1例を示す、図42と同様の図。
【図45】同じく、図43と同様の図。
【図46】本発明の実施の形態の第12例を示す、センサユニットを取り付けたカバーを取り出した状態で示す斜視図。
【図47】図46の手前側から見た側面図。
【図48】結合ばねのみを取り出して示す斜視図。
【図49】図48のE矢視図。
【図50】同F矢視図。
【図51】本発明の実施の形態の第13例を、結合ばねのみを取り出して示す斜視図。
【図52】図51の下方から見た図。
【図53】図51のG矢視図。
【図54】本発明の実施の形態の第14例を示す、図1の右部に相当する図。
【図55】被覆部材を係止した状態で示す、センサユニットの略断面図
【図56】結合ばねによりセンサユニットをカバーに抑え付け、被覆部材により結合ばねとセンサユニットとの係合部を覆う前の状態で示す部分斜視図。
【図57】同じく被覆部材により結合ばねとセンサユニットとの係合部を覆った後の状態で示す部分斜視図。
【図58】結合ばねのみを取り出して示す斜視図。
【図59】従来構造の1例を示す、図60のH−O−I断面図。
【図60】図59の左方から見た図。
【符号の説明】
1 外輪
2、2a、2b ハブ
3、3a エンコーダ
4 センサ
5a 第一の外輪軌道
5b 第二の外輪軌道
6 ナット
7、7a 内輪
8a 第一の内輪軌道
8b 第二の内輪軌道
9 転動体
10 保持器
11 静止側フランジ
12 回転側フランジ
13 シールリング
15 円筒部
16 円輪部
17 透孔
18、18a、18b、18c、18d、18e、18f、18g、18h、18i、18j、18k カバー
19 嵌合筒部
20 塞ぎ板部
21 膨出部
22 透孔
24 検知部
25 取付フランジ
26 止めねじ
27 スタッド
28、28a、28b 本体
29 嵌合筒
30 嵌合筒部
31 内向鍔部
32 透孔
33 Oリング
34 支持環
35 永久磁石
36、36a 円筒壁部
37、37a、37b 底板部
38、38a、38b 挿入孔
39、39a、39b、39c、39d、39e センサユニット
40、40a、40b、40c 挿入部
41、41a、41b、41c、41d 鍔部
42 Oリング
43 空間
44、44a、44b、44c、44d、44e、44f 係止筒
45、45a、45b 係止凹部
46 ハーネス
47、47a、47b、47c、47d、47e、47f、47g 結合ばね
48、48a、48b 係止溝
49、49a 係止脚部
50、50a、50b 抑え部
51、51a、51b、51c、51d、51e 連結部
52、52a 湾曲部
53、53a 直線部
54、54a 抑え溝
55 湾曲部
56 直線部
57、57a 傾斜面
58 先端側折れ曲がり部
59 基端側折れ曲がり部
60 大径部
61 小径部
62 切り欠き部
63 直線辺部
64 鍔部
65 傾斜辺部
66 第一の係止切り欠き
67 第二の係止切り欠き
68 折れ曲がり係止部
69 段部
70 肩部
71 円筒部
72 枢支片
73 枢支部
74 弾性脚部
75 係止孔
76 係止溝
77 先端側内側面
78 先端側内側面
79 スプライン孔
80 取付フランジ部
81 係止溝
82、82a シールリング
83 平坦部
84、84a 枢支部
85 係止フック
86 傾斜縁
87 段部
88 芯金
89 シールリップ
90 等速ジョイント
91 突出部
92 凹孔
93 枢支孔
94 ストッパプレート
95、95a、95b 結合ばね
96 枢支部
97 抑え部
98 直線部
99 湾曲部
100 摘み部
101、101a、101b、101c 弾性変形部
102 係止突起
103 第一の直線部
104 第二の直線部
105 曲線部
106 摘み部
107 第一の湾曲部
108 第二の湾曲部
109 被覆部材
110 貫通孔
111 突部
112 係止溝
113 第三の直線部
114 庇部
115 段部
Claims (2)
- 外周面に懸架装置に取り付ける為の静止側フランジを、内周面に第一、第二の外輪軌道を、それぞれ有し、使用時にも回転しない外輪と、
一端部外周面に車輪を取り付ける為の回転側フランジを、中間部外周面に上記第一の外輪軌道と対向する第一の内輪軌道を、他端部外周面に段部を、それぞれ有し、使用時に回転するハブと、
外周面に上記第二の外輪軌道と対向する第二の内輪軌道を有し、上記段部に外嵌された状態で、上記ハブの他端部でその端面から突出した部分を直径方向外方にかしめ広げる事により、このハブに結合固定した内輪と、
上記第一、第二の外輪軌道と上記第一、第二の内輪軌道との間に転動自在に設けられた複数個の転動体と、
支持環と、永久磁石とを有し、上記内輪の一部にこの内輪と同心に固定された、円周方向に亙る磁気特性を交互に且つ等間隔に変化させたエンコーダと、
上記外輪の端部に固定されたカバーと、
このカバーに支持された状態で、上記エンコーダの被検出面に対向させたセンサとを備え、
上記支持環は、磁性金属板を折り曲げる事により、円筒部と円輪部とを有する、全体を円環状に形成されたものであり、上記円筒部は、上記内輪に外嵌固定され、上記円輪部には、上記永久磁石が添着されている回転速度検出装置付背面組み合わせ型転がり軸受ユニットであって、
上記エンコーダの被検出面は、上記第二の内輪軌道上を転動する複数の転動体のピッチ円の直径よりも直径が小さい部分と直径が大きい部分とを有する事を特徴とする回転速度検出装置付背面組み合わせ型転がり軸受ユニット。 - 外周面に懸架装置に取り付ける為の静止側フランジを、内周面に第一、第二の外輪軌道を、それぞれ有し、使用時にも回転しない外輪と、
一端部外周面に車輪を取り付ける為の回転側フランジを、中間部外周面に上記第一の外輪軌道と対向する第一の内輪軌道を、他端部外周面に段部を、それぞれ有し、使用時に回転するハブと、
外周面に上記第二の外輪軌道と対向する第二の内輪軌道を有し、上記段部に外嵌された状態で、上記ハブの他端部でその端面から突出した部分を直径方向外方にかしめ広げる事により、このハブに結合固定した内輪と、
上記第一、第二の外輪軌道と上記第一、第二の内輪軌道との間に転動自在に設けられた複数個の転動体と、
支持環と、永久磁石とを有し、上記内輪の一部にこの内輪と同心に固定された、円周方向に亙る磁気特性を交互に且つ等間隔に変化させたエンコーダと、
上記外輪の端部に固定されたカバーと、
このカバーに支持された状態で、上記エンコーダの被検出面に対向させたセンサとを備え、
上記支持環は、磁性金属板を折り曲げる事により、円筒部と円輪部とを有する、全体を円環状に形成されたものであり、上記円筒部は、上記内輪に外嵌固定され、上記円輪部には、上記永久磁石が添着されている回転速度検出装置付背面組み合わせ型転がり軸受ユニットであって、
上記エンコーダの被検出面は、上記第二の内輪軌道の最大直径部の直径よりも直径が小さい部分と直径が大きい部分とを有する事を特徴とする回転速度検出装置付背面組み合わせ型転がり軸受ユニット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003200541A JP3573155B2 (ja) | 1997-03-31 | 2003-07-23 | 回転速度検出装置付背面組み合わせ型転がり軸受ユニット |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP8073797 | 1997-03-31 | ||
| JP11955497 | 1997-05-09 | ||
| JP2003200541A JP3573155B2 (ja) | 1997-03-31 | 2003-07-23 | 回転速度検出装置付背面組み合わせ型転がり軸受ユニット |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP19697497A Division JP3480253B2 (ja) | 1997-03-31 | 1997-07-23 | 回転速度検出装置付転がり軸受ユニット |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2004085560A JP2004085560A (ja) | 2004-03-18 |
| JP3573155B2 true JP3573155B2 (ja) | 2004-10-06 |
| JP2004085560A5 JP2004085560A5 (ja) | 2005-02-17 |
Family
ID=32073962
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003200541A Expired - Fee Related JP3573155B2 (ja) | 1997-03-31 | 2003-07-23 | 回転速度検出装置付背面組み合わせ型転がり軸受ユニット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3573155B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022533947A (ja) * | 2019-05-15 | 2022-07-27 | クノル-ブレムゼ ジステーメ フューア ヌッツファールツォイゲ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 回転数センサ、回転数センサ用の固定装置、回転数センサ用の収容装置、収容装置と回転数センサとを備えるセンサシステムおよび回転数センサを回動不能に位置決めするための方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005140320A (ja) | 2003-10-14 | 2005-06-02 | Nsk Ltd | 駆動輪用ハブユニット |
-
2003
- 2003-07-23 JP JP2003200541A patent/JP3573155B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022533947A (ja) * | 2019-05-15 | 2022-07-27 | クノル-ブレムゼ ジステーメ フューア ヌッツファールツォイゲ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 回転数センサ、回転数センサ用の固定装置、回転数センサ用の収容装置、収容装置と回転数センサとを備えるセンサシステムおよび回転数センサを回動不能に位置決めするための方法 |
| JP7242904B2 (ja) | 2019-05-15 | 2023-03-20 | クノル-ブレムゼ ジステーメ フューア ヌッツファールツォイゲ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 回転数センサ、回転数センサ用の固定装置、回転数センサ用の収容装置、収容装置と回転数センサとを備えるセンサシステムおよび回転数センサを回動不能に位置決めするための方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004085560A (ja) | 2004-03-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5975761A (en) | Rolling bearing unit with rotational speed sensor | |
| JP3480253B2 (ja) | 回転速度検出装置付転がり軸受ユニット | |
| JP3982093B2 (ja) | 車輪駆動用車軸ユニット | |
| US6481896B1 (en) | Sealing device for a bearing | |
| JP2000142009A5 (ja) | ||
| WO2011037183A1 (ja) | 車輪用軸受装置 | |
| WO2010013439A1 (ja) | 車輪用軸受装置 | |
| JP3932630B2 (ja) | 車輪用転がり軸受ユニット | |
| WO2001076891A1 (en) | Wheel-driving axle unit | |
| JP3573155B2 (ja) | 回転速度検出装置付背面組み合わせ型転がり軸受ユニット | |
| JP3480240B2 (ja) | 回転速度検出装置付転がり軸受ユニット | |
| JP4352535B2 (ja) | 車輪駆動用車軸ユニット | |
| JP2000018241A (ja) | 回転速度検出装置付転がり軸受ユニット | |
| JP4691851B2 (ja) | 車軸用軸受装置 | |
| JP2004085560A5 (ja) | ||
| JP2001208763A (ja) | 回転速度検出装置付転がり軸受ユニット | |
| JP2007303490A (ja) | 車輪用軸受装置 | |
| JP5166218B2 (ja) | センサー付き転がり軸受装置 | |
| JP2001150906A (ja) | 車輪駆動用車軸ユニット | |
| JP3887887B2 (ja) | 回転速度検出装置付転がり軸受ユニット | |
| JP2008095766A (ja) | 車輪用軸受 | |
| JP3834977B2 (ja) | 回転速度検出装置付転がり軸受ユニット | |
| JP2002029209A (ja) | 車輪駆動用車軸ユニット | |
| JP3427829B2 (ja) | エンコーダ付転がり軸受ユニット | |
| JP2009030760A (ja) | 回転速度検出装置付き車輪用軸受装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040311 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040311 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20040311 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20040513 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040608 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040621 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20070709 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080709 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080709 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090709 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100709 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110709 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110709 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120709 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120709 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130709 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |