JP3199399U - 立ち乗り電動車 - Google Patents
立ち乗り電動車 Download PDFInfo
- Publication number
- JP3199399U JP3199399U JP2015002908U JP2015002908U JP3199399U JP 3199399 U JP3199399 U JP 3199399U JP 2015002908 U JP2015002908 U JP 2015002908U JP 2015002908 U JP2015002908 U JP 2015002908U JP 3199399 U JP3199399 U JP 3199399U
- Authority
- JP
- Japan
- Prior art keywords
- pivot
- electric vehicle
- vehicle body
- standing
- rear direction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K3/00—Bicycles
- B62K3/002—Bicycles without a seat, i.e. the rider operating the vehicle in a standing position, e.g. non-motorized scooters; non-motorized scooters with skis or runners
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K5/00—Cycles with handlebars, equipped with three or more main road wheels
- B62K5/01—Motorcycles with four or more wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K11/00—Motorcycles, engine-assisted cycles or motor scooters with one or two wheels
- B62K11/007—Automatic balancing machines with single main ground engaging wheel or coaxial wheels supporting a rider
Abstract
【課題】安全性を向上した立ち乗り電動車を提供する。【解決手段】立ち乗り電動車は、前後方向で走行できる前輪800及び前輪800の駆動を制御する制御手段804と、制御手段804の制御を受けて前輪800の回転を駆動する駆動手段802とが取付けられている車体ブロック3が、前後方向と略直交する左右方向において左右一つずつ設けられている上に、各車体ブロック3が相対的に回動可能に枢支されるように構成されている。即ち、車体ブロック3に立って搭乗した搭乗者は、各車体ブロック3のいずれかを前後方向の前方側または後方側へ傾けることにより、各車体ブロック3の姿勢を変更できる。車体ブロック3は上面に搭乗者が足を乗せられる足掛け台31が形成されていると共に、前後方向及び左右方向の両方とも略直交する上下方向に延伸するハンドル2が取付けられている。【選択図】図2
Description
本考案は、立ち乗り電動車に関し、特に車体構造が改良された立ち乗り電動車に関する。
1輪や2輪式立ち乗り電動車は近年流行しているが、1輪式立ち乗り電動車は安定性に欠けるため転倒しやすく、一方、2輪式立ち乗り電動車は搭乗者の重心移動を感知して車輪の駆動状態(スピード)を変えることができるが、方向変換などの制御においては搭乗者が手でハンドル操作をしなければならない。
しかし、従来の2輪式立ち乗り電動車の構造では、方向変換の際に搭乗者の体に掛かる遠心力を考慮していないため、方向変換の最中に搭乗者は手でハンドルをしっかり握りながら体の姿勢を保持する必要があり、その際に搭乗者が緊張してハンドルを誤操作する可能性があり、そしてその誤操作によって転倒してしまう恐れもある。
更に、従来の2輪式立ち乗り電動車のハンドルは搭乗者から見て前方に配置されており、前方へ進んでいる間に転倒しそうになった時には前方に飛び出るようにして受身を取ろうとすることもあるが、ハンドルがそれを邪魔してハンドルに絡まれながら転倒してしまうと言う更に危険な事態が発生する可能性もある。
本考案は、上記従来の立ち乗り電動車の欠点に鑑みて、安全性を向上した立ち乗り電動車の提供を目的とする。
上記目的を達成する手段として、本考案は、前後方向で走行できる前輪及び該前輪の駆動を制御する制御手段が取付けられている車体ブロックが、前記前後方向と略直交する左右方向において左右一つずつ枢支されて設けられていることを特徴とする立ち乗り電動車を提供する。
上記構成によれば、本考案の立ち乗り電動車は、左右一つずつある車体ブロックにそれぞれ前輪及び該前輪の駆動を制御する制御手段が取付けられていると共に、該左右一つずつある車体ブロックが回動可能に枢支されている構成になっており、搭乗者が両足を該左右一つずつある車体ブロックにそれぞれ乗せて、重心を移動しながら該左右一つずつある車体ブロックを互いに回動させることができるので、各車体ブロックの回動状態に応じて当該車体ブロックに取付けられている前輪の駆動状態を変更するように構成することができる。これにより、各車体ブロックに取付けられている前輪の駆動状態はそれぞれ独立するようになるので、搭乗者はハンドルに頼らずに重心を移動することによって方向変換することができ、ハンドルを誤操作することにより引き起こされる転倒の発生を防止することができる。
以下は各図面を参照しながら本考案の立ち乗り電動車の各好ましい実施形態について詳しく説明する。
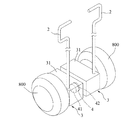
図1〜図7に本考案の立ち乗り電動車の第1の好ましい実施形態が示されており、図1はその外部構成が示されている斜視図であり、図2はその内部構成が示される説明図であり、図3は該第1の好ましい実施形態が有する第1の枢支手段の構成が示される一部拡大断面図であり、図4〜図7はその制御方法が示されている説明図である。
図1及び図2に示されているように、本考案の立ち乗り電動車は、前後方向で走行できる前輪800及び該前輪800の駆動を制御する制御手段804と、制御手段804の制御を受けて前輪800の回転を駆動する駆動手段802とが取付けられている車体ブロック3が、前後方向と略直交する左右方向において左右一つずつ設けられている上に、各車体ブロック3が相対的に回動可能に枢支されるように構成されている。即ち、車体ブロック3に立って搭乗した搭乗者は、各前記車体ブロック3のいずれかを前後方向の前方側または後方側へ傾けることにより、各前記車体ブロック3の姿勢を変更できる。
この第1の実施形態において、車体ブロック3は上面に搭乗者が足を乗せられる足掛け台31が形成されていると共に、前後方向及び左右方向の両方とも略直交する上下方向に延伸するハンドル2が取付けられている。1つの車体ブロック3に取付けられている前輪800は該当の車体ブロック3内に取付けられている制御手段804により制御される駆動手段802の駆動を受けて作動するものであり、制御手段804は車体ブロック3の姿勢を感知するジャイロセンサーを有すると共に、該ジャイロセンサーの感知結果に応じて前輪800の駆動状態を変更することができるように構成されている。
更に、図2に示されているように、左右一つずつの車体ブロック3は、左右方向に延伸するように左右一つずつの車体ブロック3の間に取付けられている第1の枢支手段4によって枢支されている。図3に示されているように、この第1の枢支手段4は、左右一つずつの車体ブロック3における一つ(図中における左側の車体ブロック3)に固定されている第1の枢支管部41と、左右一つずつの車体ブロック3における他の一つ(図中における右側の車体ブロック3)に固定されていると共に、第1の枢支管部41内に挿し込まれている第1の枢支軸部42と、第1の枢支管部41内において第1の枢支管部41と第1の枢支軸部42との間に介在するように取付けられている軸受け部43とを具えるように構成されている。
また、図4に示されているように、制御手段804は該ジャイロセンサーの感知結果に応じて、車体ブロック3が前方に傾くと、駆動手段802を、前輪800を前方へ走行させるように制御し、そして図5に示されているように、車体ブロック3が後方に傾くと、前輪800を後方へ走行させるように駆動するように構成されている。即ち、図4に示されているように左右一つずつの車体ブロック3が共に前方に傾く場合、該左右一つずつの車体ブロック3にそれぞれ取付けられている制御手段804も、同時に、駆動手段802を、前輪800を前方へ走行させるように制御するので、この第1の好ましい実施形態の立ち乗り電動車は前方へ直進するようになり、そして図5に示されているように左右一つずつの車体ブロック3が共に後方に傾く場合、該左右一つずつの車体ブロック3にそれぞれ取付けられている制御手段804も、同時に、駆動手段802を、前輪800を後方へ走行させるように制御するので、この第1の好ましい実施形態の立ち乗り電動車は後方へ後退するようになる。
更にまた、図6に示されているように、左右一つずつの車体ブロック3における左側の車体ブロック3のみが前方に傾く場合、該前方に傾く車体ブロック3に取付けられている制御手段804のみが、駆動手段802を、前輪800を前方へ走行させるように制御するので、この第1の好ましい実施形態の立ち乗り電動車は右側へ転向するようになり、そして図7に示されているように、左右一つずつの車体ブロック3における右側の車体ブロック3のみが前方に傾く場合、該前方に傾く車体ブロック3に取付けられている制御手段804のみが、駆動手段802を、前輪800を前方へ走行させるように制御するので、この第1の好ましい実施形態の立ち乗り電動車は左側へ転向するようになる。
無論、左右一つずつの車体ブロック3が前方に傾くか、後方に傾くかは、車体ブロック3の上面にある足掛け台31に脚を乗せた搭乗者の重心移動によって制御されるので、本考案の立ち乗り電動車の搭乗者はハンドルに頼らずに重心を移動することによって前進後退や方向変換を制御することができ、ハンドルを誤操作することにより引き起こされる転倒の発生を防止することができる。
次いで、図8及び図9を用いて本考案の立ち乗り電動車の第2の好ましい実施形態について説明する。図8は本考案の立ち乗り電動車の第2の好ましい実施形態の外部構成が示されている斜視図であり、図9はその内部構成が示される説明図である。
図示されているように、本考案の立ち乗り電動車の第2の好ましい実施形態の構成は第1の好ましい実施形態と類似しており、この第2の好ましい実施形態において、車体ブロック3の足掛け台31は上面ではなく側面側に配置されていると共に、制御手段804は前輪800の上方に配置されている。
更に、図10は本考案の立ち乗り電動車の第3の好ましい実施形態の内部構成が示される説明図であり、この第3の好ましい実施形態は第2の好ましい実施形態と類似するが、制御手段804は車体ブロック3の側面側に配置されている足掛け台31の下方に配置されている。
即ち、本考案の立ち乗り電動車における車体ブロック3の構成に特に制限はなく、制御手段804や前輪800、搭乗者が足を乗せられる足掛け台31などの位置は、実用新案登録請求の請求項により定められた範囲内で自由に調整することができる。
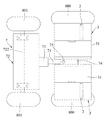
次いで、図11及び図12を用いて本考案の立ち乗り電動車の第4の好ましい実施形態について説明する。図11は本考案の立ち乗り電動車の第4の好ましい実施形態の構成が示されている断面図であり、図12はその上面構成及び一部の内部構成が示されている一部断面図である。
図示されているように、本考案の立ち乗り電動車の第4の好ましい実施形態は、第3の実施形態と類似する構成になっている左右一つずつの車体ブロック3及び該左右一つずつの車体ブロック3を枢支させる第1の枢支手段4を備えた上、前後方向で走行できる後輪801が少なくとも一つ(図示のように、この第4の好ましい実施形態では2つ)取付けられている後輪ブロック7が、前後方向における後ろ側から、第2の枢支手段73により、前後方向を回転軸として前記左右一つずつの車体ブロック3に対して回動できるように第1の枢支手段4に結合されている。
後輪ブロック7は荷台72と、前記左右方向と略平行しかつ回転自在に荷台72に取付けられている連動軸722とを有しており、2つの後輪801は、該連動軸722の両端にそれぞれ取付けられている。
第2の枢支手段73は、前記左右方向を回転軸として上下揺動できるように第1の枢支手段4に枢支されていると共に、前記前後方向における後方側へ延伸している第3の枢支軸部71と、後輪ブロック7の荷台72に固定されていると共に、第3の枢支軸部71を回転自在に受入れている第2の枢支管部731と、を具えている。
この第4の好ましい実施形態において、第3の枢支軸部71は、第1の枢支手段4の第1の枢支管部41により挿通されている連結ユニット74を介して前記左右方向を回転軸として上下揺動できるように第1の枢支手段4に枢支されていると共に、連結ユニット74及び第3の枢支軸部71の第1の枢支手段4に臨む端部を上下方向で一斉に挿通する揺動軸75によって、該揺動軸75を回転軸として左右揺動することもできるように構成されている。
更に、第2の枢支管部731と第3の枢支軸部71の第2の枢支管部731に挿し込まれている部分との間に、軸受け部732が介在している。
このように本考案の立ち乗り電動車の第4の実施形態は、車体ブロック3に形成された足掛け台31に脚を乗せた搭乗者の重心移動によって制御されるため、本考案の立ち乗り電動車の搭乗者はハンドルに頼らずに重心を移動することによって前進後退や方向変換を制御することができ、ハンドルを誤操作することにより引き起こされる転倒の発生を防止することができる構成になっている上、後輪801が少なくとも一つ(図示のように、この第4の好ましい実施形態では2つ)取付けられている後輪ブロック7をも備えているので、3輪または4輪の構成を有することにより、従来の1輪または2輪だけ有する車体よりも向上した安定性及び安全性を有している。
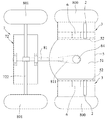
次いで、図13を用いて本考案の立ち乗り電動車の第5の好ましい実施形態について説明する。図13は本考案の立ち乗り電動車の第5の好ましい実施形態の構成が示されている断面図である。
この第5の好ましい実施形態の構成は第4の好ましい実施形態に類似し、後輪801が取付けられている後輪ブロック7が、前後方向における後ろ側から、第2の枢支手段73により前後方向を回転軸として前記左右一つずつの車体ブロック3に対して回動できるように第1の枢支手段4に結合されている。そして第2の枢支手段73は、前記左右方向を回転軸として上下揺動できるように第1の枢支手段4に枢支されていると共に、前記前後方向における後方側へ延伸している第3の枢支軸部71と、後輪ブロック7の荷台72に固定されていると共に、第3の枢支軸部71を回転自在に受入れている第2の枢支管部731と、を具えている上、第3の枢支軸部71は、第1の枢支手段4の第1の枢支管部41により挿通されている連結ユニット74を介して前記左右方向を回転軸として上下揺動できるように第1の枢支手段4に枢支されているが、この第5の好ましい実施形態における連結ユニット74の第3の枢支軸部71と連結する構成は第4の好ましい実施形態と異なっている。
この第5の好ましい実施形態において、連結ユニット74は第1の枢支手段4の第1の枢支管部41により挿通されていると共に、上方へ突起する軸支棒741が形成されており、そして第3の枢支軸部71は軸支棒741を受入れるように構成されていると共に、軸支棒741を回転軸として左右揺動できるように構成されている。
次いで、図14を用いて本考案の立ち乗り電動車の第6の好ましい実施形態について説明する。図14は本考案の立ち乗り電動車の第6の好ましい実施形態の構成が示されている断面図であり、図示のように、本考案の立ち乗り電動車の第6の好ましい実施形態は、第2の実施形態と同じく、前後方向で走行できる前輪800及び該前輪800の駆動を制御する制御手段804と、制御手段804の制御を受けて前輪800の回転を駆動する駆動手段802とが取付けられている車体ブロック3が、前後方向と略直交する左右方向において左右一つずつに枢支されており、車体ブロック3に立って搭乗した搭乗者が、各前記車体ブロック3のいずれかを前後方向の前方側または後方側へ傾けることにより、各前記車体ブロック3の姿勢を変更できる構成になっているが、この第6の好ましい実施形態において、左右一つずつの前記車体ブロック3は、左右方向においてそれぞれ第3の枢支手段6により取付け枠5に左右一つずつに枢支されている。
即ち、底板51と、該底板51の前記左右の両端からそれぞれ上へ突起する側壁52とを有するように形成された取付け枠5が有する2つの側壁52と、左右一つずつの前記車体ブロック3それぞれとの間に第3の枢支手段6がそれぞれ取付けられている。この構成でも第2の好ましい実施形態と同じように、左右一つずつの車体ブロック3に立って搭乗した搭乗者は、各前記車体ブロック3のいずれかを前後方向の前方側または後方側へ傾けることにより、各前記車体ブロック3の姿勢を変更することができる。
ちなみに、この第6の好ましい実施形態における第3の枢支手段6は、第1の好ましい実施形態における第1の枢支手段4の構成と類似しており、左右一つずつの車体ブロック3に固定されている第1の枢支管部61と、取付け枠5が有する2つの側壁52において該車体ブロック3に対応する1つに固定されていると共に、第1の枢支管部61内に挿し込まれている第1の枢支軸部62と、第1の枢支管部61内において第1の枢支管部61と第1の枢支軸部62との間に介在するように取付けられている軸受け部63とを具えるように構成されている。
次いで、図15〜図17を用いて本考案の立ち乗り電動車の第7の好ましい実施形態について説明する。図15は本考案の立ち乗り電動車の第7の好ましい実施形態の構成が示されている断面図であり、図16はその上面図であり、図17はその断面図である。
図示されているように、本考案の立ち乗り電動車の第7の好ましい実施形態は、第6の実施形態と類似し、左右一つずつの車体ブロック3がそれぞれ第3の枢支手段6により取付け枠5が有する2つの側壁52に枢支されている構成になっている上、第4の好ましい実施形態と類似する後輪ブロック7が更に取付けられている。
この第7の好ましい実施形態において、後輪ブロック7の構成は第4の好ましい実施形態と類似し、荷台72と、前記左右方向と略平行しかつ回転自在に荷台72に取付けられている連動軸722とを有しており、2つの後輪801は、該連動軸722の両端にそれぞれ取付けられている構成になっているが、第4の枢支手段8により取付け枠5の底板51と連結し、枢支されている。
この第7の好ましい実施形態における第4の枢支手段8は、前端811が取付け枠5の底板51の下面に、底板51及び前端811を一斉に挿通している枢支棒84により枢支されて左右揺動できる揺動アーム81と、後輪ブロック7の荷台72に固定されていると共に、揺動アーム81の後端を回転自在に受入れている第3の枢支管部82と、第3の枢支管部82と揺動アーム81の第3の枢支管部82に挿し込まれている部分との間に介在している軸受け部83と、を有するように構成されている。
次いで、図18を用いて本考案の立ち乗り電動車の第8の好ましい実施形態の構成を説明する。図18は本考案の立ち乗り電動車の第8の好ましい実施形態の構成が示されている断面図である。
図示のように、本考案の立ち乗り電動車の第8の好ましい実施形態は、第2の好ましい実施形態に類似しているが、左右一つずつの車体ブロック3を枢支させる第1の枢支手段4の構成が第2の好ましい実施形態と異なっている。
この第8の好ましい実施形態における第1の枢支手段4は、各車体ブロック3にそれぞれ設けられている収容管部44と、各車体ブロック3の間に配置されている軸心部47と、軸心部47から各車体ブロック3にそれぞれ設けられている収容管部44内にそれぞれ挿し込まれている2つの第2の枢支軸部45と、各第2の枢支軸部45と各第2の枢支軸部45がそれぞれ挿し込まれている収容管部44との間に介在している軸受けスリーブ46と、を具えた構成になっている。
次いで、図19〜図21を用いて本考案の立ち乗り電動車の第9の好ましい実施形態の構成を説明する。図19は本考案の立ち乗り電動車の第9の好ましい実施形態の構成が示されている断面図であり、図20はその断面図であり、図21はその連結ユニットの構成が示されている一部分解図である。
図示されているように、本考案の立ち乗り電動車の第9の好ましい実施形態は、第8の実施形態と類似し、左右一つずつの車体ブロック3がそれぞれ第1の枢支手段4により互いに枢支され、そしてこの第1の枢支手段4が各車体ブロック3にそれぞれ設けられている収容管部44と、各車体ブロック3の間に配置されている軸心部47と、軸心部47から延伸して各車体ブロック3にそれぞれ設けられている収容管部44内にそれぞれ挿し込まれている2つの第2の枢支軸部45と、各第2の枢支軸部45と各第2の枢支軸部45がそれぞれ挿し込まれている収容管部44との間に介在している軸受けスリーブ46(図18参照。収容管部44及び軸受けスリーブ46は図19〜図21では図示を省略)と、を具えた構成になっている上、第4の好ましい実施形態に類似し、後輪801が取付けられている後輪ブロック7が、前後方向における後ろ側から、第2の枢支手段73により前後方向を回転軸として前記左右一つずつの車体ブロック3に対して回動できるように第1の枢支手段4に結合されている。
そしてこの第9の好ましい実施形態において、第2の枢支手段73は、左右方向を回転軸として上下揺動できるように第1の枢支手段4の軸心部47に枢支されていると共に、所定の方向(略上下方向)に沿って延伸するように形成された軸棒613及び軸棒613の第1の枢支手段4から離れた一端に形成されて軸棒613の延伸方向と略直交する挿通孔614を囲む保持管615を有するように形成されたT字形コネクタ61と、T字形コネクタ61の挿通孔614を挿通するように取付けられていて、該T字形コネクタ614を介して左右方向を回転軸として上下揺動できるように第1の枢支手段4の軸心部47に枢支されている第3の枢支軸部71と、後輪ブロック7の荷台72から前後方向における前方側へ延伸する連結棒721と、連結棒721の先端部に形成され、T字形コネクタ61の挿通孔614と共に第3の枢支軸部71を回転自在に受入れている第2の枢支管部731とを有するように構成されている。
次いで、図22〜図24を用いて本考案の立ち乗り電動車の第10の好ましい実施形態の構成を説明する。図22は本考案の立ち乗り電動車の第10の好ましい実施形態の外部構成が示されている斜視図であり、図23はその側面図であり、図24はその上面図である。
図示のように、本考案の立ち乗り電動車の第10の好ましい実施形態は、第2の実施形態と同じく、前後方向で走行できる前輪800及び該前輪800の駆動を制御する制御手段804と、制御手段804の制御を受けて前輪800の回転を駆動する駆動手段802とが取付けられている車体ブロック3が、前後方向と略直交する左右方向において第1の枢支手段4により左右一つずつに枢支されており、車体ブロック3に立って搭乗した搭乗者は、各前記車体ブロック3のいずれかを前後方向の前方側または後方側へ傾けることにより、各前記車体ブロック3の姿勢を変更できる構成になっているが、この第10の好ましい実施形態においては、1つの車体ブロック3に前輪800及び後輪801が一つずつ取付けられている。
即ち、この第10の好ましい実施形態における各前記車体ブロック3には、それぞれ前後方向と略平行するように延伸し、その中央部341で当該車体ブロック3に枢支されていると共に、前輪800が中央部341の前方側に取付けられている車輪接続枠34と、車輪接続枠34の中央部341の後方側に取付けられている後輪801とが更に取付けられている。
上記のように、本考案の立ち乗り電動車の全ての実施形態は、共に車体ブロック3に形成された足掛け台31に脚を乗せた搭乗者の重心移動によって制御されるので、本考案の立ち乗り電動車の搭乗者はハンドルに頼らずに重心を移動することによって前進後退や方向変換を制御することができ、ハンドルを誤操作することにより引き起こされる転倒の発生を防止することができる構成になっているので、従来より安全性を向上した立ち乗り電動車を提供することができる。更に、本考案は3輪または4輪の構成を有する構成も提案しているので、従来の1輪または2輪だけ有する車体よりも向上した安定性及び安全性を有している。
以上、本考案の好ましい実施形態を説明したが、本考案はこれに限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能である。
本考案に係る立ち乗り電動車は、安定性及び安全性が向上された移動手段として利用することができる。
3 車体ブロック
31 足掛け台
34 車輪接続枠
341 中央部
4 第1の枢支手段
41 第1の枢支管部
42 第1の枢支軸部
43 軸受け部
44 収容管部
45 第2の枢支軸部
46 軸受けスリーブ
47 軸心部
5 取付け枠
51 底板
52 側壁
6 第3の枢支手段
61 T字形コネクタ
61 第1の枢支管部
613 軸棒
614 挿通孔
615 保持管
62 第1の枢支軸部
63 軸受け部
7 後輪ブロック
71 第3の枢支軸部
72 荷台
721 連結棒
722 連動軸
73 第2の枢支手段
731 第2の枢支管部
732 軸受け部
74 連結ユニット
741 軸支棒
75 揺動軸
8 第4の枢支手段
800 前輪
801 後輪
802 駆動手段
802 後輪
804 制御手段
81 揺動アーム
811 前端
82 第3の枢支管部
83 軸受け部
84 枢支棒
31 足掛け台
34 車輪接続枠
341 中央部
4 第1の枢支手段
41 第1の枢支管部
42 第1の枢支軸部
43 軸受け部
44 収容管部
45 第2の枢支軸部
46 軸受けスリーブ
47 軸心部
5 取付け枠
51 底板
52 側壁
6 第3の枢支手段
61 T字形コネクタ
61 第1の枢支管部
613 軸棒
614 挿通孔
615 保持管
62 第1の枢支軸部
63 軸受け部
7 後輪ブロック
71 第3の枢支軸部
72 荷台
721 連結棒
722 連動軸
73 第2の枢支手段
731 第2の枢支管部
732 軸受け部
74 連結ユニット
741 軸支棒
75 揺動軸
8 第4の枢支手段
800 前輪
801 後輪
802 駆動手段
802 後輪
804 制御手段
81 揺動アーム
811 前端
82 第3の枢支管部
83 軸受け部
84 枢支棒
Claims (14)
- 前後方向で走行できる前輪及び該前輪の駆動を制御する制御手段が取付けられている車体ブロックが、前記前後方向と略直交する左右方向において左右一つずつ枢支されて設けられていることを特徴とする立ち乗り電動車。
- 各前記車体ブロックに取付けられている前記制御手段は、前記車体ブロックの姿勢を感知するジャイロセンサーを有すると共に、前記ジャイロセンサーの感知結果に応じて前記前輪の駆動状態を変更することができるように構成されていることを特徴とする請求項1に記載の立ち乗り電動車。
- 前記左右一つずつの車体ブロックは、前記左右方向に延伸するように前記左右一つずつの車体ブロックの間に取付けられている第1の枢支手段によって枢支されていることを特徴とする請求項2に記載の立ち乗り電動車。
- 各前記車体ブロックには、前記前後方向及び前記左右方向の両方とも略直交する上下方向に延伸するハンドルが取付けられており、前記車体ブロックに立って搭乗した搭乗者が各前記車体ブロックのいずれかを前記前後方向の前方側または後方側へ傾けることにより、各前記車体ブロックの姿勢を変更できるように構成されていることを特徴とする請求項3に記載の立ち乗り電動車。
- 前記第1の枢支手段は、
前記左右一つずつの車体ブロックにおける一つに固定されている第1の枢支管部と、
前記左右一つずつの車体ブロックにおける他の一つに固定されていると共に、前記第1の枢支管部内に挿し込まれている第1の枢支軸部と、
前記第1の枢支管部内において前記第1の枢支管部と前記第1の枢支軸部との間に介在するように取付けられている軸受け部と
を具えていることを特徴とする請求項3または請求項4に記載の立ち乗り電動車。 - 前記第1の枢支手段は、
各前記車体ブロックにそれぞれ設けられている収容管部と、
各前記車体ブロックの間に配置されている軸心部と、
前記軸心部から各前記車体ブロックにそれぞれ設けられている前記収容管部内にそれぞれ挿し込まれている2つの第2の枢支軸部と、
各前記第2の枢支軸部と各前記第2の枢支軸部がそれぞれ挿し込まれている前記収容管部との間に介在している軸受けスリーブと、
を具えていることを特徴とする請求項3〜請求項5のいずれか一項に記載の立ち乗り電動車。 - 前記前後方向で走行できる後輪が少なくとも一つ取付けられている後輪ブロックが、前記前後方向における後ろ側から、第2の枢支手段により、前記前後方向を回転軸として前記左右一つずつの車体ブロックに対して回動できるように前記第1の枢支手段に結合されていることを特徴とする請求項3〜請求項6のいずれか一項に記載の立ち乗り電動車。
- 前記第2の枢支手段は、
前記左右方向を回転軸として上下揺動できるように前記第1の枢支手段に枢支されていると共に、前記前後方向における後方側へ延伸している第3の枢支軸部と、
前記後輪ブロックに固定されていると共に、前記第3の枢支軸部を回転自在に受入れている第2の枢支管部と、
を具えていることを特徴とする請求項7に記載の立ち乗り電動車。 - 前記第2の枢支手段は、
前記左右方向を回転軸として上下揺動できるように前記第1の枢支手段に枢支されていると共に、所定の方向に沿って延伸するように形成された軸棒及び前記軸棒の前記第1の枢支手段から離れた一端に形成されて前記軸棒の延伸方向と略直交する挿通孔を囲む保持管を有するように形成されたT字形コネクタを更に備えており、
前記第3の枢支軸部は、前記T字形コネクタの前記挿通孔を挿通するように取付けられていて、該T字形コネクタを介して前記左右方向を回転軸として上下揺動できるように前記第1の枢支手段に枢支されており、
前記第2の枢支管部は、前記後輪ブロックから前記前後方向における前方側へ延伸する連結棒の先端部に形成されていることを特徴とする請求項8に記載の立ち乗り電動車。 - 前記左右一つずつの前記車体ブロックは、前記前後方向と略直交する左右方向においてそれぞれ第3の枢支手段により取付け枠に左右一つずつ枢支されていることを特徴とする請求項2に記載の立ち乗り電動車。
- 前記取付け枠は、底板と、該底板の前記左右の両端からそれぞれ上へ突起する側壁とを有するように形成されており
前記取付け枠が有する2つの前記側壁と、左右一つずつの前記車体ブロックそれぞれとの間に前記第3の枢支手段がそれぞれ取付けられていることを特徴とする請求項10に記載の立ち乗り電動車。 - 前後方向で走行できる後輪が少なくとも一つ取付けられている後輪ブロックが、前記前後方向における後ろ側から、第4の枢支手段により、上下方向を回転軸として前記取付け枠に対して左右回動できるように前記取付け枠に結合されていることを特徴とする請求項11に記載の立ち乗り電動車。
- 前記第4の枢支手段は、前端が前記取付け枠の前記底板の下面に、前記底板及び該前端を一斉に挿通している枢支棒により枢支されて左右揺動できる揺動アームと、前記後輪ブロックに固定されていると共に、前記揺動アームの後端を回転自在に受入れている第3の枢支管部と、前記第3の枢支管部と前記揺動アームの前記第3の枢支管部に挿し込まれている部分の間に介在している軸受け部と、を有するように構成されていることを特徴とする請求項12に記載の立ち乗り電動車。
- 各前記車体ブロックは、
前記前後方向と略平行するように延伸し、その中央部で当該車体ブロックに枢支されていると共に、前記前輪が前記中央部の前方側に取付けられている車輪接続枠と、
前記車輪接続枠の前記中央部の後方側に取付けられている後輪とが更に取付けられていることを特徴とする請求項2に記載の立ち乗り電動車。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201410260138.5A CN105216933B (zh) | 2014-06-10 | 2014-06-10 | 一种两轮自平衡电动车的车架总成 |
| CN201410260138.5 | 2014-06-10 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP3199399U true JP3199399U (ja) | 2015-08-20 |
Family
ID=53722506
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015002908U Expired - Fee Related JP3199399U (ja) | 2014-06-10 | 2015-06-09 | 立ち乗り電動車 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9499228B2 (ja) |
| JP (1) | JP3199399U (ja) |
| CN (1) | CN105216933B (ja) |
| TW (2) | TWM500726U (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3159252A3 (en) * | 2015-09-30 | 2017-08-30 | Jiangxi Di an New Energy Vehicles Co., Limited | A two-wheeled balancing electric vehicle |
| JP2018534195A (ja) * | 2015-10-10 | 2018-11-22 | ハンチョウ チック インテリジェント テクノロジー カンパニー リミテッドHangzhou Chic Intelligent Technology Co., Ltd | 全姿勢のマンマシンインタラクションの電動立ち乗り車 |
| JP2018535146A (ja) * | 2015-10-12 | 2018-11-29 | 杭州騎客智能科技有限公司Hangzhou Chic Intelligent Technology Co., Ltd | 電動平衡型スイングカー |
Families Citing this family (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104014123A (zh) | 2014-06-13 | 2014-09-03 | 杭州骑客智能科技有限公司 | 纵向双轮车体 |
| US10189528B2 (en) * | 2014-09-15 | 2019-01-29 | Changzhou Airwheel | Self-balancing double-wheeled electrical scooter |
| US10286971B2 (en) | 2014-09-15 | 2019-05-14 | Changzhou Airwheel Technology Co., Ltd. (Cn) | Self-balancing double-wheeled electrical scooter |
| ITUB20153451A1 (it) * | 2015-09-07 | 2017-03-07 | Def Tech Sas Di Ettore De Francesco & C | Veicolo a due ruote autostabilizzante, in particolare anfibio. |
| USD785114S1 (en) * | 2015-10-09 | 2017-04-25 | Hangzhou Chic Intelligent Technology Co., Ltd. | Human-machine interaction vehicle |
| US11260905B2 (en) | 2015-10-10 | 2022-03-01 | Hangzhou Chic Intelligent Technology Co., Ltd. | Human-machine interaction vehicle |
| US20170233023A1 (en) * | 2015-10-29 | 2017-08-17 | Shane Chen | Self-balancing vehicle with adjustable or movable positioning of foot platforms |
| USD783751S1 (en) * | 2015-11-11 | 2017-04-11 | Dongguan Chexiaomi Intelligent Technology Co., Ltd. | Self-balance vehicle |
| USD785112S1 (en) * | 2015-11-26 | 2017-04-25 | Hangzhou Chic Intelligent Technology Co., Ltd. | Human-machine interaction vehicle |
| USD785113S1 (en) * | 2015-11-26 | 2017-04-25 | Hangzhou Chic Intelligent Technology Co., Ltd. | Human-machine interaction vehicle |
| CN105383623B (zh) * | 2015-12-16 | 2017-11-07 | 华南理工大学 | 一种便携式电动车及其驱动的控制方法 |
| KR101800679B1 (ko) * | 2016-01-14 | 2017-11-23 | 주식회사 로보쓰리 | 족동형 트위스트 조향식 핸즈프리 밸런싱 스쿠터 |
| WO2017124120A1 (en) * | 2016-01-17 | 2017-07-20 | Chen, Shane | Self-balancing load bearing vehicle |
| USD785736S1 (en) * | 2016-01-21 | 2017-05-02 | Hangzhou Chic Intelligent Technology Co., Ltd. | Human-machine interaction vehicle |
| CN205365967U (zh) * | 2016-01-27 | 2016-07-06 | 卢南方 | 一种两轴平衡扭扭车 |
| US9688340B1 (en) | 2016-02-03 | 2017-06-27 | Hoverpowered, Llc | Accessory for a self-balancing board |
| CN105730574B (zh) * | 2016-02-03 | 2018-08-17 | 浙江瑞萌威电子科技有限公司 | 踏板连接机构及采用该踏板连接机构的电动平衡车 |
| USD786994S1 (en) * | 2016-02-29 | 2017-05-16 | Razor Usa Llc. | Self-balancing two-wheeled board |
| USD786995S1 (en) * | 2016-03-10 | 2017-05-16 | Hangzhou Chic Intelligent Technology Co., Ltd. | Human-machine interaction vehicle |
| WO2017161351A1 (en) * | 2016-03-17 | 2017-09-21 | Shane Chen | Self-balancing transportation device with angular movement of foot platform |
| CN105652881A (zh) * | 2016-03-21 | 2016-06-08 | 深圳市踏路科技有限公司 | 一种基于位移检测的四轮平衡车 |
| US10315721B2 (en) * | 2016-08-01 | 2019-06-11 | HoverHandle, LLC | Self-balancing scooter differential control apparatus |
| US10167037B2 (en) * | 2016-08-08 | 2019-01-01 | Hangzhou Chic Intelligent Technology Co., Ltd. | Human computer interactive motion apparatus |
| CN106005162A (zh) * | 2016-08-10 | 2016-10-12 | 尚艳燕 | 一种电动平衡车 |
| CN106005164A (zh) * | 2016-08-10 | 2016-10-12 | 尚艳燕 | 一种电动平衡车 |
| CN106184537B (zh) * | 2016-08-18 | 2022-05-27 | 江苏双双高新科技有限公司 | 万向漂游车 |
| CN106240703B (zh) * | 2016-08-31 | 2022-04-22 | 杭州速控软件有限公司 | 电动平衡扭扭车开机自平衡控制方法 |
| CN108284901A (zh) * | 2017-01-09 | 2018-07-17 | 扬顶(天津)商贸有限公司 | 一种新的两轮自平衡车 |
| CN211943614U (zh) * | 2017-03-09 | 2020-11-17 | 陈星� | 具有独立轮控的自平衡运输器具 |
| US11524740B2 (en) * | 2017-08-05 | 2022-12-13 | Shane Chen | Transportation device having multiple axes of rotation and auto-balance based drive control |
| CN107618603A (zh) * | 2017-09-22 | 2018-01-23 | 苏州诺乐智能科技有限公司 | 一种电动平衡扭扭车 |
| US10758435B2 (en) * | 2018-02-20 | 2020-09-01 | Jerry Lee Adams, III | Wheelchair frame assembly |
| US20200031418A1 (en) * | 2018-07-28 | 2020-01-30 | Shane Chen | Foot-controlled personal transportation device |
| CN110789635B (zh) * | 2018-08-03 | 2022-08-12 | 黄学正 | 智能型移动载具 |
| US10456658B1 (en) * | 2019-02-11 | 2019-10-29 | Future Motion, Inc. | Self-stabilizing skateboard |
| DE102019202546B3 (de) * | 2019-02-26 | 2020-07-09 | Uwe Bernhard | Dynamisch selbstbalancierendes Zweirad-Fahrzeug |
| US11141647B2 (en) | 2019-05-01 | 2021-10-12 | Bowen Li | Self-balancing vehicle with rotation stop |
| US10421006B1 (en) * | 2019-05-01 | 2019-09-24 | Bowen Li | Self-balancing vehicle and structural support therein |
| TWI767612B (zh) * | 2021-03-16 | 2022-06-11 | 崑山科技大學 | 深度學習控制兩輪機具平衡方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7363993B2 (en) * | 2003-11-04 | 2008-04-29 | Toyota Jidosha Kabushiki Kaisha | Traveling apparatus and method for controlling thereof |
| JP4650327B2 (ja) * | 2005-04-14 | 2011-03-16 | トヨタ自動車株式会社 | 同軸二輪車 |
| JP5147542B2 (ja) * | 2008-05-23 | 2013-02-20 | 本田技研工業株式会社 | 倒立振子移動体 |
| KR101079755B1 (ko) * | 2010-06-14 | 2011-11-03 | 김준형 | 핸즈프리형 전동스쿠터 |
| CN102001402A (zh) * | 2010-10-28 | 2011-04-06 | 张璐 | 双踏板动感平衡车 |
| JP2012126224A (ja) * | 2010-12-15 | 2012-07-05 | Bosch Corp | 倒立振子型移動体 |
| US8738278B2 (en) * | 2012-02-12 | 2014-05-27 | Shane Chen | Two-wheel, self-balancing vehicle with independently movable foot placement sections |
| CN203142913U (zh) * | 2013-01-07 | 2013-08-21 | 许昌义 | 双体车 |
| CN203158157U (zh) * | 2013-03-20 | 2013-08-28 | 陈和 | 两轮电动车 |
-
2014
- 2014-06-10 CN CN201410260138.5A patent/CN105216933B/zh active Active
- 2014-11-07 TW TW103219807U patent/TWM500726U/zh not_active IP Right Cessation
- 2014-11-14 US US14/542,134 patent/US9499228B2/en active Active
-
2015
- 2015-06-09 TW TW104209172U patent/TWM513829U/zh not_active IP Right Cessation
- 2015-06-09 JP JP2015002908U patent/JP3199399U/ja not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3159252A3 (en) * | 2015-09-30 | 2017-08-30 | Jiangxi Di an New Energy Vehicles Co., Limited | A two-wheeled balancing electric vehicle |
| JP2018534195A (ja) * | 2015-10-10 | 2018-11-22 | ハンチョウ チック インテリジェント テクノロジー カンパニー リミテッドHangzhou Chic Intelligent Technology Co., Ltd | 全姿勢のマンマシンインタラクションの電動立ち乗り車 |
| JP2018535146A (ja) * | 2015-10-12 | 2018-11-29 | 杭州騎客智能科技有限公司Hangzhou Chic Intelligent Technology Co., Ltd | 電動平衡型スイングカー |
Also Published As
| Publication number | Publication date |
|---|---|
| TWM513829U (zh) | 2015-12-11 |
| CN105216933B (zh) | 2019-04-16 |
| US9499228B2 (en) | 2016-11-22 |
| US20150353158A1 (en) | 2015-12-10 |
| TWM500726U (zh) | 2015-05-11 |
| CN105216933A (zh) | 2016-01-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3199399U (ja) | 立ち乗り電動車 | |
| KR101377986B1 (ko) | 조향핸들 정위치 복원형 셀프 밸런싱 스쿠터 | |
| JP4710934B2 (ja) | 車体構造及び同軸二輪車 | |
| JP3981733B2 (ja) | 平行2輪乗用台車 | |
| US8322478B2 (en) | Hands-free electric scooter | |
| CN104071275B (zh) | 自平衡电动双轮车及其组装车架 | |
| US20160101823A1 (en) | Self-balancing vehicle frame | |
| JP6081271B2 (ja) | 倒立振子型車両 | |
| JP2009040165A (ja) | 三輪走行装置 | |
| JP2010047151A (ja) | 自動三輪車 | |
| JP2012011997A (ja) | 車両 | |
| JP2013233895A (ja) | 車両 | |
| JP5369999B2 (ja) | 車両 | |
| JP5458723B2 (ja) | 車両 | |
| JP2013144513A (ja) | 車両 | |
| KR102310165B1 (ko) | 구형 바퀴를 구비한 차량 | |
| KR20130087798A (ko) | 전동보행기 | |
| JP7420699B2 (ja) | 車両 | |
| JP6347011B2 (ja) | 前二輪自転車旋回時の車体傾斜装置 | |
| JP2011046275A (ja) | 車両 | |
| WO2011102106A1 (ja) | 車両 | |
| CN216102576U (zh) | 脚控个人运输器 | |
| JP5890722B2 (ja) | 懸架装置 | |
| JP2006151032A (ja) | 立ち乗り式小型車両 | |
| TWI588053B (zh) | 體感式移動載具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 3199399 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |