JP2025041217A - 錠剤印刷装置及び錠剤印刷方法 - Google Patents
錠剤印刷装置及び錠剤印刷方法 Download PDFInfo
- Publication number
- JP2025041217A JP2025041217A JP2023148379A JP2023148379A JP2025041217A JP 2025041217 A JP2025041217 A JP 2025041217A JP 2023148379 A JP2023148379 A JP 2023148379A JP 2023148379 A JP2023148379 A JP 2023148379A JP 2025041217 A JP2025041217 A JP 2025041217A
- Authority
- JP
- Japan
- Prior art keywords
- tablet
- conveying
- unit
- correction value
- inkjet head
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J3/00—Typewriters or selective printing or marking mechanisms characterised by the purpose for which they are constructed
- B41J3/407—Typewriters or selective printing or marking mechanisms characterised by the purpose for which they are constructed for marking on special material
- B41J3/4073—Printing on three-dimensional objects not being in sheet or web form, e.g. spherical or cubic objects
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61J—CONTAINERS SPECIALLY ADAPTED FOR MEDICAL OR PHARMACEUTICAL PURPOSES; DEVICES OR METHODS SPECIALLY ADAPTED FOR BRINGING PHARMACEUTICAL PRODUCTS INTO PARTICULAR PHYSICAL OR ADMINISTERING FORMS; DEVICES FOR ADMINISTERING FOOD OR MEDICINES ORALLY; BABY COMFORTERS; DEVICES FOR RECEIVING SPITTLE
- A61J3/00—Devices or methods specially adapted for bringing pharmaceutical products into particular physical or administering forms
- A61J3/007—Marking tablets or the like
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J11/00—Devices or arrangements of selective printing mechanisms, e.g. ink-jet printers or thermal printers, for supporting or handling copy material in sheet or web form
- B41J11/20—Platen adjustments for varying the strength of impression, for a varying number of papers, for wear or for alignment, or for print gap adjustment
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J13/00—Devices or arrangements of selective printing mechanisms, e.g. ink-jet printers or thermal printers, specially adapted for supporting or handling copy material in short lengths, e.g. sheets
- B41J13/08—Conveyor bands or like feeding devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J25/00—Actions or mechanisms not otherwise provided for
- B41J25/304—Bodily-movable mechanisms for print heads or carriages movable towards or from paper surface
- B41J25/308—Bodily-movable mechanisms for print heads or carriages movable towards or from paper surface with print gap adjustment mechanisms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J29/00—Details of, or accessories for, typewriters or selective printing mechanisms not otherwise provided for
- B41J29/38—Drives, motors, controls or automatic cut-off devices for the entire printing mechanism
- B41J29/393—Devices for controlling or analysing the entire machine ; Controlling or analysing mechanical parameters involving printing of test patterns
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J3/00—Typewriters or selective printing or marking mechanisms characterised by the purpose for which they are constructed
- B41J3/54—Typewriters or selective printing or marking mechanisms characterised by the purpose for which they are constructed with two or more sets of type or printing elements
- B41J3/543—Typewriters or selective printing or marking mechanisms characterised by the purpose for which they are constructed with two or more sets of type or printing elements with multiple inkjet print heads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41M—PRINTING, DUPLICATING, MARKING, OR COPYING PROCESSES; COLOUR PRINTING
- B41M5/00—Duplicating or marking methods; Sheet materials for use therein
- B41M5/0041—Digital printing on surfaces other than ordinary paper
- B41M5/0047—Digital printing on surfaces other than ordinary paper by ink-jet printing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41M—PRINTING, DUPLICATING, MARKING, OR COPYING PROCESSES; COLOUR PRINTING
- B41M5/00—Duplicating or marking methods; Sheet materials for use therein
- B41M5/0082—Digital printing on bodies of particular shapes
- B41M5/0088—Digital printing on bodies of particular shapes by ink-jet printing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61J—CONTAINERS SPECIALLY ADAPTED FOR MEDICAL OR PHARMACEUTICAL PURPOSES; DEVICES OR METHODS SPECIALLY ADAPTED FOR BRINGING PHARMACEUTICAL PRODUCTS INTO PARTICULAR PHYSICAL OR ADMINISTERING FORMS; DEVICES FOR ADMINISTERING FOOD OR MEDICINES ORALLY; BABY COMFORTERS; DEVICES FOR RECEIVING SPITTLE
- A61J2205/00—General identification or selection means
- A61J2205/40—General identification or selection means by shape or form, e.g. by using shape recognition
Landscapes
- Health & Medical Sciences (AREA)
- Manufacturing & Machinery (AREA)
- Engineering & Computer Science (AREA)
- Pharmacology & Pharmacy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Medicinal Chemistry (AREA)
- Chemical & Material Sciences (AREA)
- Ink Jet (AREA)
- Medical Preparation Storing Or Oral Administration Devices (AREA)
- Printing Methods (AREA)
Abstract
【解決手段】実施形態に係る錠剤印刷装置は、錠剤を搬送する搬送装置(例えば、搬送部21)と、錠剤に印刷を行う第1のインクジェットヘッド(例えば、インクジェットヘッド24)と、搬送装置又は第1のインクジェットヘッドを高さ方向に移動させる移動機構(例えば、第2の移動機構24A)と、移動機構を制御する制御装置40と、を備え、制御装置40は、搬送装置の高さ位置と第1の基準高さ位置(例えば、基準高さ位置Ba)との差に基づいて第1の補正値を生成し、錠剤の品種に関する錠剤品種情報に基づいて第2の補正値を生成し、第1の補正値及び第2の補正値に基づいて移動機構を制御する。
【選択図】図3
Description
本実施形態について図1から図9を参照して説明する。
図1に示すように、本実施形態に係る錠剤印刷装置1は、供給装置10と、第1の印刷装置20と、第2の印刷装置50と、回収装置30と、制御装置40とを備える。
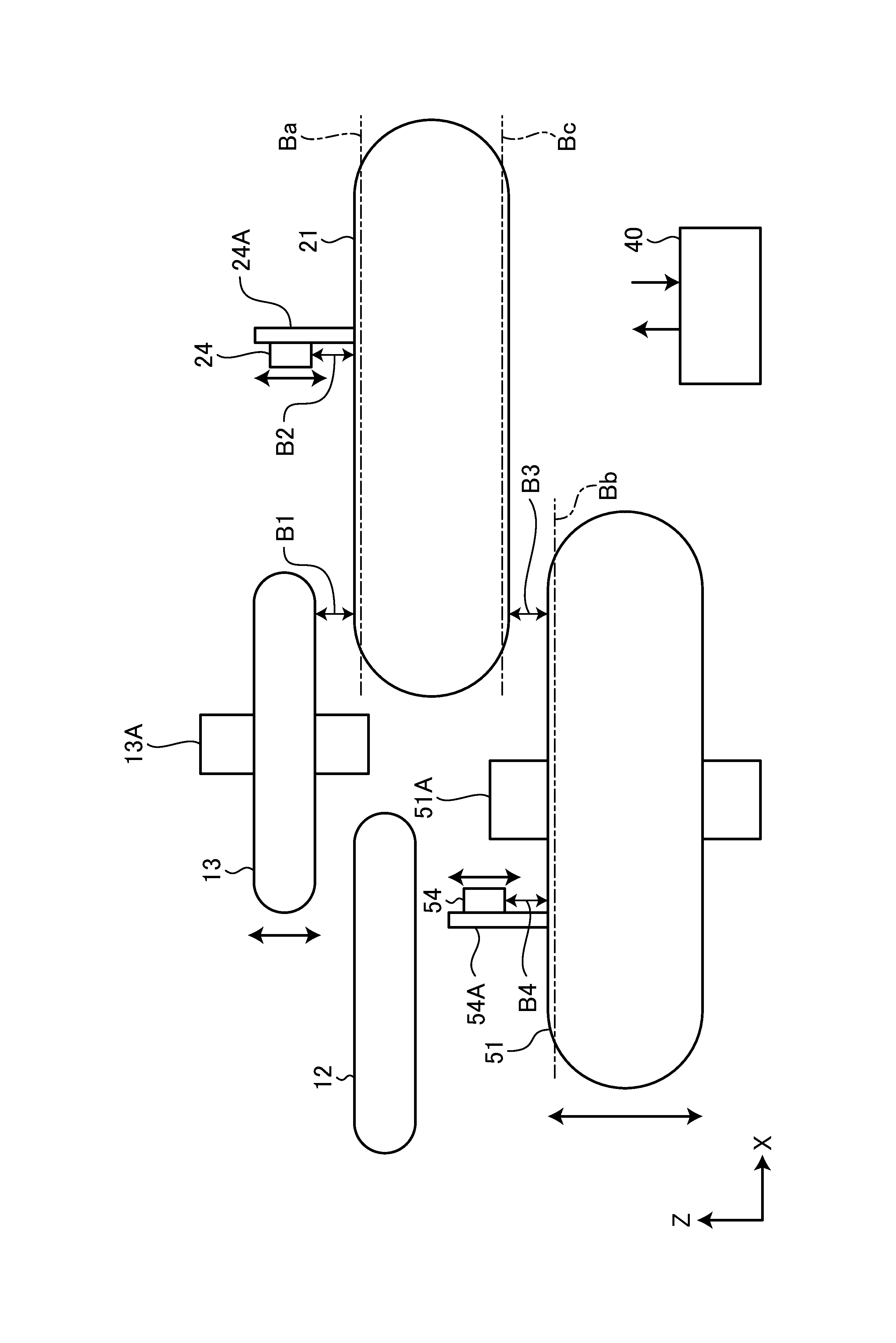
次に、錠剤印刷装置1の移動機構(第1の移動機構13A、第2の移動機構24A、第3の移動機構51A及び第4の移動機構54A)の構成例について図3を参照して説明する。
次に、制御装置40の構成例について図4を参照して説明する。
次に、前述の錠剤印刷装置1が行う位置調整工程について図5を参照して説明する。この位置調整工程が実行された後に、印刷工程(検査工程を含む)が実行される。なお、位置調整や印刷、検査に要するデータなどの各種情報は、記憶部42に予め記憶されている。
前述の位置調整工程が完了すると、多数の錠剤Tがホッパ11に供給され、印刷工程が開始される。印刷工程では、供給装置10のホッパ11に印刷対象の錠剤Tが多数投入されると、錠剤Tはホッパ11から整列フィーダ12に順次供給され始め、整列フィーダ12により一列に並べられて移動する。この一列で移動する錠剤Tは受渡フィーダ13により第1の印刷装置20の搬送ベルト21aに順次供給される。搬送ベルト21aは、モータ21dによる駆動プーリ21b及び各従動プーリ21cの回転によって搬送方向A1に回転している。ランダムな間隔で搬送ベルト21a上に供給された錠剤Tは搬送ベルト21a上で一列に並んで所定の搬送速度で搬送されていく。
前述の説明においては、実施形態に係る錠剤印刷装置1(錠剤印刷方法)を用いて錠剤Tに印刷を行うが、これは、実施形態に係る錠剤印刷装置1(錠剤印刷方法)を用いて錠剤Tに印刷を行い、印刷済の錠剤Tを製造すると言い換えることも可能である。すなわち、錠剤印刷装置1を錠剤製造装置に、錠剤印刷方法を錠剤製造方法に言い換えることができる。
10 供給装置
11 ホッパ
12 整列フィーダ
13 受渡フィーダ
13A 第1の移動機構
20 第1の印刷装置
21 搬送部
21a 搬送ベルト
21b 駆動プーリ
21c 従動プーリ
21d モータ
21e 位置検出器
21f 吸引チャンバ
21g 吸引孔
22 検出部
22A 検出部
22B 移動機構
23 第1の撮像部
24 インクジェットヘッド
24A 第2の移動機構
24a ノズル
25 第2の撮像部
27 乾燥部
30 回収装置
31 再利用品回収部
31a 噴射ノズル
31b 回収ボックス
32 不良品回収部
32a 噴射ノズル
32b 回収ボックス
33 良品回収部
33b 回収ボックス
33a 噴射ノズル
40 制御装置
40a 入力装置
40b 出力装置
41 画像処理部
42 記憶部
43 制御部
50 第2の印刷装置
51 搬送部
51A 第3の移動機構
51a 搬送ベルト
51b 駆動プーリ
51c 従動プーリ
51d モータ
51e 位置検出器
51f 吸引チャンバ
52 検出部
53 第1の撮像部
54 インクジェットヘッド
54A 第4の移動機構
55 第2の撮像部
57 乾燥部
A1 搬送方向
A2 搬送方向
Ba 基準高さ位置
Bb 基準高さ位置
Bc 基準高さ位置
B1 離間距離
B2 離間距離
B3 離間距離
B4 離間距離
T 錠剤
Claims (6)
- 錠剤を搬送する搬送装置と、
前記錠剤に印刷を行う第1のインクジェットヘッドと、
前記搬送装置又は前記第1のインクジェットヘッドを高さ方向に移動させる移動機構と、
前記移動機構を制御する制御装置と、
を備え、
前記制御装置は、
前記搬送装置の高さ位置と第1の基準高さ位置との差に基づいて第1の補正値を生成し、
前記錠剤の品種に関する錠剤品種情報に基づいて第2の補正値を生成し、
前記第1の補正値及び前記第2の補正値に基づいて前記移動機構を制御する、
錠剤印刷装置。 - 前記搬送装置は、
前記第1のインクジェットヘッドにより印刷される前記錠剤を搬送する第1の搬送部と、
前記第1の搬送部に前記錠剤を渡す供給搬送部と、
を有し、
前記移動機構は、前記第1の搬送部又は前記供給搬送部を高さ方向に移動させる機構であり、
前記制御装置は、前記第1の搬送部の高さ位置と前記第1の基準高さ位置との差に基づいて前記第1の補正値を生成する、
請求項1に記載の錠剤印刷装置。 - 前記錠剤に印刷を行う第2のインクジェットヘッドをさらに備え、
前記搬送装置は、
前記第1のインクジェットヘッドにより印刷される前記錠剤を搬送する第1の搬送部と、
前記第2のインクジェットヘッドにより印刷される前記錠剤を搬送する第2の搬送部と、
を有し、
前記移動機構は、前記第2のインクジェットヘッド、前記第1の搬送部又は前記第2の搬送部を高さ方向に移動させる機構であり、
前記制御装置は、
前記第1の搬送部の高さ位置と前記第1の基準高さ位置との差に基づいて前記第1の補正値を生成し、
前記第2の搬送部の高さ位置と第2の基準高さ位置との差に基づいて第3の補正値を生成し、
前記第1の補正値、前記第2の補正値及び前記第3の補正値に基づいて前記移動機構を制御する、
請求項1に記載の錠剤印刷装置。 - 前記錠剤の到来を検出する検出部をさらに備え、
前記制御装置は、前記検出部の検出結果に基づいて前記搬送装置の高さ位置を測定する、
請求項1から3のいずれか一項に記載の錠剤印刷装置。 - 前記錠剤品種情報は、前記錠剤の識別情報、前記錠剤の厚み情報及び前記錠剤の形状情報のいずれか又は全てを含む、
請求項1から3のいずれか一項に記載の錠剤印刷装置。 - 制御装置が、
錠剤を搬送する搬送装置の高さ位置と第1の基準高さ位置との差に基づいて第1の補正値を生成することと、
前記錠剤の品種に関する錠剤品種情報に基づいて第2の補正値を生成することと、
前記第1の補正値及び前記第2の補正値に基づいて、前記錠剤に印刷を行う第1のインクジェットヘッド又は前記搬送装置を高さ方向に移動させる移動機構を制御することと、
を含む、
錠剤印刷方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023148379A JP2025041217A (ja) | 2023-09-13 | 2023-09-13 | 錠剤印刷装置及び錠剤印刷方法 |
| KR1020240100455A KR20250039272A (ko) | 2023-09-13 | 2024-07-29 | 정제 인쇄 장치 및 정제 인쇄 방법 |
| CN202411083550.4A CN119610902A (zh) | 2023-09-13 | 2024-08-08 | 片剂印刷装置及片剂印刷方法 |
| TW113129839A TWI907007B (zh) | 2023-09-13 | 2024-08-09 | 片劑印刷裝置及片劑印刷方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023148379A JP2025041217A (ja) | 2023-09-13 | 2023-09-13 | 錠剤印刷装置及び錠剤印刷方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2025041217A true JP2025041217A (ja) | 2025-03-26 |
| JP2025041217A5 JP2025041217A5 (ja) | 2025-05-01 |
Family
ID=94893560
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023148379A Pending JP2025041217A (ja) | 2023-09-13 | 2023-09-13 | 錠剤印刷装置及び錠剤印刷方法 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP2025041217A (ja) |
| KR (1) | KR20250039272A (ja) |
| CN (1) | CN119610902A (ja) |
| TW (1) | TWI907007B (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013052637A (ja) * | 2011-09-06 | 2013-03-21 | Seiko Epson Corp | プリンターおよびそのプラテンギャップ調整装置 |
| JP2016193043A (ja) * | 2015-03-31 | 2016-11-17 | 芝浦メカトロニクス株式会社 | 錠剤印刷装置 |
| JP2018130536A (ja) * | 2017-02-16 | 2018-08-23 | 芝浦メカトロニクス株式会社 | 錠剤印刷装置 |
| JP2023050476A (ja) * | 2021-09-30 | 2023-04-11 | 芝浦メカトロニクス株式会社 | 錠剤印刷装置及び錠剤印刷方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3290208B1 (en) * | 2015-04-30 | 2020-12-09 | Shibaura Mechatronics Corporation | Tablet-printing apparatus and tablet-printing method |
| WO2016194761A1 (ja) * | 2015-05-29 | 2016-12-08 | 芝浦メカトロニクス株式会社 | 錠剤印刷装置及び錠剤印刷方法 |
| JP2019058220A (ja) | 2017-09-24 | 2019-04-18 | 株式会社京都製作所 | 錠剤印刷装置 |
| JP7424780B2 (ja) * | 2019-09-27 | 2024-01-30 | 芝浦メカトロニクス株式会社 | インクボトル保持装置、錠剤印刷装置、及び錠剤印刷方法 |
-
2023
- 2023-09-13 JP JP2023148379A patent/JP2025041217A/ja active Pending
-
2024
- 2024-07-29 KR KR1020240100455A patent/KR20250039272A/ko active Pending
- 2024-08-08 CN CN202411083550.4A patent/CN119610902A/zh active Pending
- 2024-08-09 TW TW113129839A patent/TWI907007B/zh active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013052637A (ja) * | 2011-09-06 | 2013-03-21 | Seiko Epson Corp | プリンターおよびそのプラテンギャップ調整装置 |
| JP2016193043A (ja) * | 2015-03-31 | 2016-11-17 | 芝浦メカトロニクス株式会社 | 錠剤印刷装置 |
| JP2018130536A (ja) * | 2017-02-16 | 2018-08-23 | 芝浦メカトロニクス株式会社 | 錠剤印刷装置 |
| JP2023050476A (ja) * | 2021-09-30 | 2023-04-11 | 芝浦メカトロニクス株式会社 | 錠剤印刷装置及び錠剤印刷方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN119610902A (zh) | 2025-03-14 |
| TW202511091A (zh) | 2025-03-16 |
| TWI907007B (zh) | 2025-12-01 |
| KR20250039272A (ko) | 2025-03-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10709639B2 (en) | Tablet printing apparatus and tablet printing method | |
| US10486440B2 (en) | Tablet printing apparatus | |
| JP2026053585A (ja) | 錠剤印刷装置及び錠剤印刷方法 | |
| TWI871239B (zh) | 片劑印刷裝置及片劑印刷方法 | |
| JP7714735B2 (ja) | 錠剤印刷装置及び錠剤印刷方法 | |
| JP2025041217A (ja) | 錠剤印刷装置及び錠剤印刷方法 | |
| JP7394681B2 (ja) | 錠剤印刷装置及び錠剤製造方法 | |
| JP7473525B2 (ja) | 錠剤印刷装置および錠剤印刷方法 | |
| JP7280704B2 (ja) | 錠剤印刷装置及び錠剤印刷方法 | |
| CN116429778B (zh) | 片剂检查装置及片剂印刷装置 | |
| JP7397132B2 (ja) | 錠剤印刷装置及び錠剤印刷方法 | |
| JP7402298B2 (ja) | 錠剤検査装置及び錠剤印刷装置 | |
| TWI836559B (zh) | 錠劑印刷裝置及錠劑印刷方法 | |
| JP7377137B2 (ja) | 錠剤印刷装置及び錠剤印刷方法 | |
| JP2026058378A (ja) | 錠剤検査装置および錠剤印刷装置 | |
| JP2023104884A (ja) | 情報処理装置、情報処理方法及び錠剤印刷装置 | |
| JP2023046679A (ja) | 錠剤印刷装置、および錠剤印刷方法。 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240626 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250422 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20250422 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20260203 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20260210 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20260408 |