JP2022096889A - X線管装置及びx線撮影装置 - Google Patents
X線管装置及びx線撮影装置 Download PDFInfo
- Publication number
- JP2022096889A JP2022096889A JP2020210137A JP2020210137A JP2022096889A JP 2022096889 A JP2022096889 A JP 2022096889A JP 2020210137 A JP2020210137 A JP 2020210137A JP 2020210137 A JP2020210137 A JP 2020210137A JP 2022096889 A JP2022096889 A JP 2022096889A
- Authority
- JP
- Japan
- Prior art keywords
- oscillator
- ray
- ray tube
- rotation
- vibration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Apparatus For Radiation Diagnosis (AREA)
Abstract

【課題】回転陽極の回転に伴って生じる振動を抑制すること。
【解決手段】X線管装置1は、回転陽極13と、ハウジング11と、加振器20と、を持つ。回転陽極13は、陰極15から放出される熱電子を受けてX線Lを放出する。ハウジング11は、回転陽極13を少なくとも保持する。加振器20は、ハウジング11に取り付けられ、回転することで振動を与える。加振器20の第1回転軸23は回転陽極13の第2回転軸17と平行に設けられる。
【選択図】図1
【解決手段】X線管装置1は、回転陽極13と、ハウジング11と、加振器20と、を持つ。回転陽極13は、陰極15から放出される熱電子を受けてX線Lを放出する。ハウジング11は、回転陽極13を少なくとも保持する。加振器20は、ハウジング11に取り付けられ、回転することで振動を与える。加振器20の第1回転軸23は回転陽極13の第2回転軸17と平行に設けられる。
【選択図】図1
Description
本明細書及び図面に開示の実施形態は、X線管装置及びX線撮影装置に関する。
従来、陽極が回転する回転陽極X線管装置が知られている。回転陽極X線管装置では、回転体である回転陽極のバランス調整がなされており、安定した回転を維持するようにしている。この回転陽極X線管装置にかかる熱負荷や衝撃によって回転陽極X線管に不可逆的な変形が生じると、回転陽極のバランスが崩れる。その結果、回転陽極の回転に伴う振動が大きくなり、この振動が回転陽極X線管より撮影装置の各部位に伝達し、画質の低下や騒音の問題が生じることがある。
バランスが崩れた回転陽極では、例えば、バランスの調整が求められる。しかし、回転陽極X線管では、回転陽極が真空容器内に組み込まれている。このため、回転陽極X線管を組み立てた後に、回転陽極の位置調整を図るなどして回転陽極を直接バランス調整することは難しかった。
本明細書及び図面に開示の実施形態が解決しようとする課題は、回転陽極の回転に伴って生じる振動を抑制することである。ただし、本明細書及び図面に開示の実施形態により解決しようとする課題は上記課題に限られない。後述する実施形態に示す各構成による各効果に対応する課題を他の課題として位置づけることもできる。
実施形態のX線管装置は、回転陽極と、ハウジングと、加振器と、を持つ。回転陽極は、陰極から放出される熱電子を受けてX線を放出する。ハウジングは、前記回転陽極を少なくとも保持する。加振器は、前記ハウジングに取り付けられ、回転することで振動を与える。前記加振器の第1回転軸は前記回転陽極の第2回転軸と平行に設けられる。
以下、図面を参照しながら、実施形態のX線管装置及びX線撮影装置について説明する。
(第1の実施形態)
図1は、第1の実施形態のX線管装置1の断面図である。X線管装置1は、例えば、X線管10と、加振器20と、センサ類30と、制御装置40と、を備える。X線管10は、箱型のハウジング11を備えている。ハウジング11の内部には、真空容器12が設けられている。真空容器の12の内部には、ターゲット13及びロータ14が設けられている。X線管10は、ハウジング11及び真空容器12を貫通するカソード(陰極)15を備えている。
図1は、第1の実施形態のX線管装置1の断面図である。X線管装置1は、例えば、X線管10と、加振器20と、センサ類30と、制御装置40と、を備える。X線管10は、箱型のハウジング11を備えている。ハウジング11の内部には、真空容器12が設けられている。真空容器の12の内部には、ターゲット13及びロータ14が設けられている。X線管10は、ハウジング11及び真空容器12を貫通するカソード(陰極)15を備えている。
真空容器12内は、真空状態とされている。ハウジング11の内側であり真空容器12の内側に配置されるロータ14の外周には、ステータ16が設けられている。ステータ16に電気が流れることにより、ステータ16とロータ14の間に発生する磁力によってロータ14が回転する。ロータ14には、第2回転軸17が接続されている。第2回転軸17には、ターゲット13が接続されている。ロータ14が回転することにより、第2回転軸17を介してターゲット13が回転する。ターゲット13の内側には、ベアリング、例えば流体軸受18が設けられている。
ターゲット13は、例えば円盤状をなし、半径方向に沿った断面の外側に傾斜部13Rが設けられている。ターゲット13はアノード(陽極)である。ターゲット13が回転し、X線高電圧装置114から高電圧が印加されると、カソード(陰極)15にはフィラメントが実装されており、フィラメントから電子が放出される。カソード(陰極)15から放出された電子は、ターゲット13の傾斜部13Rに衝突し、ターゲット13に電子が衝突することでX線Lが発生する。発生したX線Lは、真空容器12及びハウジング11を介してX線管10の外部に照射される。ターゲット13は、回転陽極の一例である。
加振器20は、例えば、ケース21と、モータ22と、第1回転軸23と、振動子24と、を備える。ケース21は、ハウジング11に取り付けられている。モータ22は、ケース21の外側に設けられている、第1回転軸23及び振動子24は、ケース21の内側に収容されている。モータ22には、第1回転軸23が接続されている。
モータ22は、第1回転軸23を回転させる。第1回転軸23には、振動子24が取り付けられている。振動子24は、第1回転軸23が回転することにより、第1回転軸23周りに回転する。第1回転軸23は、第2回転軸17に対して、平行かつ同軸に設けられている。第1回転軸23は、第2回転軸17に対して、同軸でない状態で設けられていてもよい。
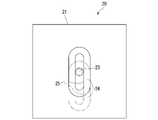
図2は、振動子24の側面図である。振動子24は、底面が長円形をなす柱体である。振動子24には、第1回転軸23に交差、例えば直交する方向である長円の長手方向に沿って伸びる長孔25が設けられている。長孔25に第1回転軸23が貫通する。長孔25は、振動子24における長手方向の中央位置に配置されている。長孔25は、振動子24における長手方向のどの位置に設けられていてもよい。例えば、長孔25は、その一端が振動子24における長手方向の中央位置に位置するように配置されていてもよい。
第1回転軸23は、長孔25の長手方向の任意の位置に例えば操作者による手作業で取付可能である。長孔25における第1回転軸23が取り付けられる位置に応じて、振動子24は、第1回転軸23に対して偏心する。例えば、第1回転軸23が長孔25の長手方向中央部に取り付けられている場合には、振動子24は第1回転軸23に対して偏心していない。第1回転軸23が取り付けられる位置が、長孔25の長手方向中央部よりずれるほど、第1回転軸23に対する振動子24の偏心が大きくなる。例えば、図2に仮想線で示すように、振動子24の端部に第1回転軸23が位置するときに、振動子24の偏心量が最大となる。長孔25は、振動子24を第1回転軸23に対して偏心させる。長孔25は、偏心部の一例である。
振動子24は、ターゲット13の回転に同期して回転することにより、振動子24の回転によってハウジング11に与える振動により、ハウジング11の振動を相殺して打ち消す。振動子24の偏心量が大きくなるほど、振動子24の回転によってハウジング11に与える振動が大きくなる。このため、例えば、ターゲット13の回転によるハウジング11の振動が大きくなるほど、振動子24の偏心量を大きくするとよい。
ターゲット13を回転させた場合にハウジング11に生じる振動は、長期間を経ていない段階ではある程度安定している。このため、ハウジング11に振動が生じる場合には、例えば、ターゲット13を回転させるX線検査を実行する前の段階で、作業員の手によって第1回転軸23に対して振動子24を偏心させる。
図1に示すように、センサ類30は、第1速度位置センサ31と、第2速度位置センサ32と、加速度センサ33と、を備える。第1速度位置センサ31は、加振器20における第1回転軸23の回転速度及び位相(回転角度)を検出し、検出結果に応じた第1情報を生成する。第1速度位置センサ31は、生成した第1情報を制御装置40に送信する。
第2速度位置センサ32は、X線管10における第2回転軸17の回転速度及び位相を検出し、検出結果に応じた第2情報を生成する。第2速度位置センサ32は、生成した第2情報を制御装置40に送信する。加速度センサ33は、X線管10のハウジング11に取り付けられ、ハウジング11の振動(加速度)を検出し、検出結果に応じた第3情報を生成する。加速度センサ33は生成した第3情報を制御装置40に送信する。第1情報、第2情報、及び第3情報は、検出情報の一例である。ハウジング11の振動は、回転陽極の回転に応じた振動の一例である。
制御装置40は、例えば、入力インターフェース41と、送受信回路42と、処理回路43と、ロータ駆動回路44と、加振器モータ駆動回路45と、を備える。制御装置40は、センサ類30により送信される検出情報に基づいて、加振器20を制御する。制御装置40は、制御部の一例である。入力インターフェース41は、例えば、操作者が操作可能であり、操作者の操作に応じてX線管装置1をON-OFFするON-OFF情報を送受信回路42に送信する。
なお、本明細書において入力インターフェース41はマウス、キーボードなどの物理的な操作部品を備えるものだけに限られない。例えば、装置とは別体に設けられた外部の入力機器から入力操作に対応する電気信号を受け取り、この電気信号を制御回路へ出力する電気信号の処理回路も入力インターフェース41の例に含まれる。
送受信回路42は、入力インターフェース41により送信されるON-OFF情報及びセンサ類30により送信される情報を受信する。送受信回路42は、受信した情報を処理回路43に出力する。
処理回路43は、例えば、検出機能51と、振動解析機能52と、判定機能53と、回転制御機能54と、を備える。処理回路43は、例えば、ハードウェアプロセッサが記憶装置(記憶回路)に記憶されたプログラムを実行することにより、これらの機能を実現するものである。ハードウェアプロセッサとは、例えば、CPU(Central Processing Unit)、GPU(Graphics Processing Unit)、特定用途向け集積回路(Application Specific Integrated Circuit; ASIC)、プログラマブル論理デバイス(例えば、単純プログラマブル論理デバイス(Simple Programmable Logic Device; SPLD)または複合プログラマブル論理デバイス(Complex Programmable Logic Device; CPLD)、フィールドプログラマブルゲートアレイ(Field Programmable Gate Array; FPGA))などの回路(circuitry)を意味する。記憶装置にプログラムを記憶させる代わりに、ハードウェアプロセッサの回路内にプログラムを直接組み込むように構成しても構わない。この場合、ハードウェアプロセッサは回路内に組み込まれたプログラムを読み出し実行することで機能を実現する。ハードウェアプロセッサは、単一の回路として構成されるものに限らず、複数の独立した回路を組み合わせて1つのハードウェアプロセッサとして構成され、各機能を実現するようにしてもよい。記憶装置は、非一時的(ハードウェアの)記憶媒体でもよい。また、複数の構成要素を1つのハードウェアプロセッサに統合して各機能を実現するようにしてもよい。
検出機能51は、第2速度位置センサ32により送信され、送受信回路42により出力された第2情報を取得する。検出機能51は、取得した第2情報に基づいて、ターゲット13の回転速度及び位相を検出する。検出機能51は、検出したターゲット13の回転速度及び位相を振動解析機能52及び回転制御機能54に出力する。
振動解析機能52は、加速度センサ33により送信され、送受信回路42により出力された第3情報を取得する。振動解析機能52は、検出機能51により出力されたターゲット13の回転速度及び位相を取得する。振動解析機能52は、取得した第3情報に基づいて、ハウジング11の加速度を検出する。振動解析機能52は、検出したハウジング11の加速度と、取得したターゲット13の回転速度及び位相を用いて振動解析を実行し、ハウジング11の振動量を算出する。振動解析機能52は、算出したハウジング11の振動量を判定機能53に出力する。
判定機能53は、振動解析機能52により出力されたハウジング11の振動量に基づいて加振器20を作動させるか否かを判定する。判定機能53は、X線管10のターゲット13が回転しているときに、加振器20を作動させるか否かについての判定を実行する。制御装置40は、例えば、加振器20を作動させるか否かを判定するためのハウジング11の振動量のしきい値を記憶している。
判定機能53は、振動解析機能52により出力されたハウジング11の振動量と、制御装置40が記憶するしきい値とを比較して加振器20を作動させるか否かを判定する。判定機能53は、加振器20を作動させるか否かについての判定結果を回転制御機能54に出力する。判定機能53は、加振器20を作動させるか否かについての判定をターゲット13が回転しているときに実行してもよいし、振動解析機能52により出力されたハウジング11の振動量を記憶しておき、ターゲット13が回転していないときに実行してもよい。
回転制御機能54は、入力インターフェース41により送信されたON情報を送受信回路42が受信した場合に、停止中のターゲット13を回転させるようにロータ駆動回路44を制御する。回転制御機能54は、入力インターフェース41により送信されたOFF情報を送受信回路42が受信した場合に、回転中のターゲット13を停止させるようにロータ駆動回路44を制御する。
回転制御機能54は、判定機能53により出力された判定結果を取得する。回転制御機能54は、取得した判定結果に応じて、加振器20を作動させる。回転制御機能54は、加振器20を作動させるとの判定結果を取得した場合に、モータ22を作動させて第1回転軸23及び振動子24を回転させるように加振器モータ駆動回路45を制御する。
回転制御機能54は、加振器20を作動させている間、第1速度位置センサ31により送信され、送受信回路42により出力された第1情報を取得する。回転制御機能54は、取得した第1情報に基づいて、ロータ14の回転速度及び位相を取得する。回転制御機能54は、検出機能51により出力されたターゲット13の回転速度及び位相を取得する。
回転制御機能54は、取得したターゲット13と振動子24の回転速度及び位相をそれぞれ比較して、ターゲット13と振動子24が同期して回転するためのモータ22の回転速度及び位相を算出する。振動解析機能52は、振動子24がターゲット13と同期して回転するように加振器モータ駆動回路45にモータ22を作動させる。ターゲット13と振動子24が同期して回転することにより、ターゲット13の回転によって生じるハウジング11の振動を、振動子24を回転させて生じる振動によって相殺して打ち消す。その結果、ハウジング11の振動を抑制することができる。
ロータ駆動回路44は、回転制御機能54の制御に基づいて駆動し、例えばターゲット13を回転させたり停止させたりする。加振器モータ駆動回路45は、回転制御機能54の制御に基づいて駆動し、例えば振動子24がターゲット13と同期して回転するようにモータ22を作動させる。
次に、制御装置40における処理について説明する。図3は、制御装置40における処理の一例を示すフローチャートである。制御装置40は、まず、入力インターフェース41により送信されるON情報を送受信回路42が受信したか否かを判定する(ステップS101)。送受信回路42がON情報を受信していないと判定した場合、制御装置40は、図3に示す処理を終了する。
送受信回路42がON情報を受信したと判定した場合、回転制御機能54は、ロータ駆動回路44を制御してロータ14を回転させる(ステップS103)。ロータ14は、ステータ16からのトルクを受けて作動する。ロータ14が作動することにより、第2回転軸17を介してターゲット13が回転する(ステップS105)。
ターゲット13が回転すると、第2速度位置センサ32は、例えば一定時間ごとにターゲット13の回転速度及び位相を検出し、第2情報を生成して制御装置40に送信する(ステップS107)。さらに、加速度センサ33は、例えば一定時間ごとにハウジング11の振動を検出し、第3情報を生成して制御装置40に送信する(ステップS109)。
続いて、振動解析機能52は、加速度センサ33により送信された第3情報に基づいて、ハウジング11の振動量を算出し、判定機能53に出力する。判定機能53は、振動解析機能52により出力されたハウジング11の振動量と、制御装置40が記憶するしきい値を比較して加振器20を作動させるか否かを判定する(ステップS111)。
判定機能53は、振動解析機能52により出力されたハウジング11の振動量が、制御装置40が記憶するしきい値を超えない場合に、加振器20を作動させないと判定する。判定機能53は、振動解析機能52により出力されたハウジング11の振動量が、制御装置40が記憶するしきい値を超えた場合に、加振器20を作動させると判定する。
振動解析機能52により出力されたハウジング11の振動量がしきい値を超えず、加振器20を作動させないと判定機能53が判定した場合、制御装置40は、図3に示す処理を終了する。振動解析機能52により出力されたハウジング11の振動量がしきい値を超えて加振器20を作動させると判定した場合、回転制御機能54は、加振器モータ駆動回路45を制御してモータ22を作動させる(ステップS113)。モータ22が作動することにより、第1回転軸23を介して振動子24が回転する(ステップS115)。
振動子24が回転すると、第1速度位置センサ31は、例えば一定時間ごとに振動子24の回転速度及び位相を検出し、第1情報を生成して制御装置40に送信する(ステップS117)。続いて、回転制御機能54は、取得したターゲット13と振動子24の回転速度及び位相をそれぞれ比較し、ともに回転するターゲット13と振動子24が同期しているか否かを判定する(ステップS119)。
ターゲット13と振動子24が同期していないと判定した場合、回転制御機能54は、ターゲット13と振動子24が同期して回転するためのモータ22の回転速度及び位相を算出する。回転制御機能54は、算出した回転速度及び位相に応じて加振器モータ駆動回路45を制御し、モータ22によって振動子24をターゲット13と同期して回転させる(ステップS121)。ターゲット13と振動子24が同期していると判定した場合、回転制御機能54は、そのままステップS123に処理を進める。
続いて、入力インターフェース41により送信されるOFF情報を送受信回路42が受信して処理回路43に出力したか否かを判定する(ステップS123)。送受信回路42が受信したOFF情報を処理回路43に出力していないと判定した場合、制御装置40は、処理をステップS103に戻す。送受信回路42が受信したOFF情報を処理回路43に出力したと判定した場合、制御装置40は、図3に示す処理を終了する。
以上説明した第1の実施形態のX線管装置1では、ハウジング11に取り付けられた加振器20における振動子24。振動子24は、ターゲット13と同期して回転するので、ターゲット13の回転に起因するハウジング11の振動を、振動子24の回転によって抑制することができる。さらには、X線管装置1に生じる振動の許容範囲を広くすることができるので、生産歩留まりの向上に寄与することができる。
ここで、振動子24を回転させる第1回転軸23は、ターゲット13の回転軸となる第2回転軸17と平行に配置されている。このため、ハウジング11の振動をさらに好適に抑制することができる。さらに、第1回転軸23は、第2回転軸17と同軸に配置されている。このため、ハウジング11の振動をさらに好適に抑制することができる。
(第2の実施形態)
次に、第2の実施形態について説明する。第2の実施形態のX線管装置2は、第1の実施形態のX線管装置1と比較して、加振器の構造及び加振器の構造の相違に伴う制御装置における制御が主に異なる。第1の実施形態では、第1回転軸23に対して振動子24を操作者が取り付けることによって振動子24を第1回転軸23に対して偏心させる。第2の実施形態のX線管装置2では、第1回転軸23に対する可動式振動子60の偏心量を制御装置40によって調整する。以下、第1の実施形態との相違点を中心として、第2の実施形態のX線管装置2について説明する。以下の説明において、第1の実施形態と共通の要素については同一の符号を付して、その説明を省略または簡略化することがある。
次に、第2の実施形態について説明する。第2の実施形態のX線管装置2は、第1の実施形態のX線管装置1と比較して、加振器の構造及び加振器の構造の相違に伴う制御装置における制御が主に異なる。第1の実施形態では、第1回転軸23に対して振動子24を操作者が取り付けることによって振動子24を第1回転軸23に対して偏心させる。第2の実施形態のX線管装置2では、第1回転軸23に対する可動式振動子60の偏心量を制御装置40によって調整する。以下、第1の実施形態との相違点を中心として、第2の実施形態のX線管装置2について説明する。以下の説明において、第1の実施形態と共通の要素については同一の符号を付して、その説明を省略または簡略化することがある。
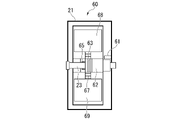
図4は、第2の実施形態のX線管装置2の断面図である。第2の実施形態のX線管装置2は、例えば、X線管10と、加振器20と、センサ類30と、制御装置40と、を備える。第2の実施形態の加振器20は、第1の実施形態の加振器20の振動子24に代えて、可動式振動子60を備える。
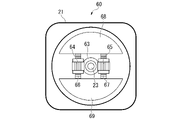
図5Aは、第2の実施形態の加振器20の側面図である。図5Bは、第2の実施形態の加振器20の正面図である。第2の実施形態の加振器20は、第1の実施形態の加振器20と同様のケース21と、図1に示すモータ22と、第1回転軸23とを備えるとともに、可動式振動子60を備える。
可動式振動子60は、例えば、スリップリング61と、内部モータ62と、ギア63と、第1中継ギア64と、第2中継ギア65と、第1スクリューシャフト66と、第2スクリューシャフト67と、第1振動子68と、第2振動子69と、を備える。スリップリング61は、例えばケース21の内側に設けられている。スリップリング61は、ケース21の外部から供給される電力を内部モータ62に供給する。
ギア63、第1中継ギア64、第2中継ギア65、第1スクリューシャフト66、及び第2スクリューシャフト67は、内部モータ62の駆動力を第1振動子68及び第2振動子69に伝達する伝達機構である。伝達機構は他の構造でもよい。例えば、伝達機構は、ラックアンドピニオン形式の伝達機構でもよい。伝達機構は、例えば、傘歯車を介在させた伝達機構でもよい。
第1回転軸23には、内部モータ62及びギア63が設けられている。内部モータ62は、ギア63に接続されている。内部モータ62は、例えばサーボモータである。ギア63は、第1回転軸23周りに回転する。内部モータ62は、回転駆動することにより、ギア63の位相を調整する。ギア63には、第1中継ギア64及び第2中継ギア65が噛み合わされている。
第1中継ギア64及び第2中継ギア65は、第1回転軸23を挟んで互いに対称となる位置に配置されている。第1中継ギア64及び第2中継ギア65は、いずれも鉛直軸周りに回転する。第1中継ギア64及び第2中継ギア65には、第1スクリューシャフト66及び第2スクリューシャフト67がそれぞれねじ込まれている。
第1スクリューシャフト66及び第2スクリューシャフト67は、いずれも鉛直方向に延在する。第1中継ギア64が第1方向に回転することにより、第1スクリューシャフト66が上昇する。第1中継ギア64が第1方向に反する第2方向に回転することにより、第1スクリューシャフト66が下降する。第2中継ギア65が第1方向に回転することにより、第2スクリューシャフト67が上昇する。第2中継ギア65が第2方向に回転することにより、第2スクリューシャフト67が下降する。
第1中継ギア64及び第2中継ギア65は、ギア63の回転に伴って、互いに共通の方向に回転する。このため、ギア63とかみ合う第1中継ギア64及び第2中継ギア65の回転方向は共通である。さらに、第1スクリューシャフト66及び第2スクリューシャフト67は、互いに共通の方向に移動する。図5A、図5Bに示す状態では、第1スクリューシャフト66及び第2スクリューシャフト67は、互いに上昇または下降する。
第1スクリューシャフト66及び第2スクリューシャフト67の一端(上端)部には、第1振動子68が固定されている。第1スクリューシャフト66及び第2スクリューシャフト67の他端(下端)部には、第2振動子69が固定されている。内部モータ62がギア63を回転させると、第1中継ギア64、第2中継ギア65、第1スクリューシャフト66、及び第2スクリューシャフト67を介して、第1振動子68及び第2振動子69が互いに共通の方向に移動する。図5A、図5Bに示す状態では、第1振動子68及び第2振動子69は、互いに上昇または下降する。
第1振動子68及び第2振動子69は、移動することによって第1回転軸23に対して偏心する。内部モータ62と、ギア63と、第1中継ギア64と、第2中継ギア65と、第1スクリューシャフト66と、第2スクリューシャフト67は、偏心部の一例である。第1スクリューシャフト66及び第2スクリューシャフト67は、第1中継ギア64及び第2中継ギア65とともに、第1振動子68及び第2振動子69の移動を案内する。内部モータ62は、第1振動子68及び第2振動子69を移動させる。内部モータ62は、動力源の一例である。動力源は、電動モータ以外のものでもよく、例えば弾性を有する部材や流体圧系シリンダなどでもよい。第1スクリューシャフト66及び第2スクリューシャフト67は、案内部の一例である。
図4に示すように、可動式振動子60には、制御装置40が接続されている。制御装置40は、内部モータ62を制御して、第1振動子68及び第2振動子69の位置を調整するための調整情報を可動式振動子60に送信する。制御装置40における処理回路43は、第1の実施形態に示す各機能のほか、バランス解析機能55及び調整機能56を備える。
バランス解析機能55は、振動解析機能52により算出されたハウジング11の振動量を用いてX線管装置2のバランス解析を実行する。バランス解析機能55は、バランス解析の結果に基づいて、加振器20によってハウジング11の振動を打ち消すために要求される加振器20の可動式振動子60における第1振動子68及び第2振動子69の第1回転軸23に対する偏心量を算出する。
バランス解析機能55は、例えば、ハウジング11の振動量が大きく、加振器20によってハウジング11の振動を打ち消す度合が大きい場合に、第1振動子68及び第2振動子69の偏心量を大きくする。バランス解析機能55は、例えば、ハウジング11の振動量が小さく、加振器20によってハウジング11の振動を打ち消す度合が小さい場合に、第1振動子68及び第2振動子69の偏心量を小さくしたり、なくしたりする。バランス解析機能55は、算出した第1振動子68及び第2振動子69の偏心量を調整機能56に出力する。
調整機能56は、バランス解析機能55により出力された第1振動子68及び第2振動子69の偏心量に応じた駆動情報を生成する。調整機能56は、生成した駆動情報を内部モータ62に送信する。調整機能56は、駆動情報を内部モータ62に送信することにより、第1振動子68及び第2振動子69を第1回転軸23に対して偏心させる。
以上説明した第2の実施形態のX線管装置2では、第1の実施形態のX線管装置1と同様、ターゲット13が回転し、ハウジング11の振動が大きくなると、加振器20を作動させて可動式振動子60を回転させる。可動式振動子60が回転すると、第1振動子68及び第2振動子69の回転によってハウジング11に与える振動により、ハウジング11の振動を相殺して打ち消すことになる。
第2の実施形態のX線管装置2では、例えば期間の経過によって劣化が進行し、ターゲット13の振動が大きくなることがある。この場合、加振器20を作動させたとしても、ハウジング11の振動を十分に相殺して打ち消すことができないことがある。
そこで、第2の実施形態にX線管装置2では、加速度センサ33により送信される加速度情報に基づいてX線管装置2のバランス解析を実行する。X線管装置2は、バランス解析の結果、ハウジング11の振動量が変化した場合に、加振器20における第1振動子68及び第2振動子69の偏心量を調整する。このため、ターゲット13を回転させているときのハウジング11の振動量に変化が生じても、加振器20によってハウジング11の振動を好適に相殺して打ち消すことができる。
X線管装置2では、制御装置40が内部モータ62に駆動情報を送信することで、第1振動子68及び第2振動子69の偏心量を調整する。このため、操作者の手を煩わせることなく第1振動子68及び第2振動子69の偏心量を調整することができる。X線管装置2では、ターゲット13及び可動式振動子60を回転させている間も制御装置40が内部モータ62に駆動情報を送信することができる。このため、X線の放射を実行している間に、リアルタイムで第1振動子68及び第2振動子69の偏心量調整することができる。したがって、例えば、X線の放射を実行している間に、ハウジング11の振動が激しくなった場合でも、即座に第1振動子68及び第2振動子69の偏心量を調整して、ハウジング11の振動を抑制することができる。その結果、ダウンタイムを減らすことができる。
(第3の実施形態)
図6は、第3の実施形態に係るX線CT装置100の構成図である。X線CT装置100は、例えば、架台装置110と、寝台装置130と、コンソール装置140とを有する。図6では、説明の都合上、架台装置110をZ軸方向から見た図とX軸方向から見た図の双方を掲載しているが、実際には、架台装置110は一つである。実施形態では、寝台装置130の天板133の長手方向をZ軸方向(前後方向)、Z軸方向に直交し、床面に対して水平である軸をX軸方向(周方向)、Z軸方向に直交し、床面に対して垂直である方向をY軸方向(上下方向)とそれぞれ定義する。
図6は、第3の実施形態に係るX線CT装置100の構成図である。X線CT装置100は、例えば、架台装置110と、寝台装置130と、コンソール装置140とを有する。図6では、説明の都合上、架台装置110をZ軸方向から見た図とX軸方向から見た図の双方を掲載しているが、実際には、架台装置110は一つである。実施形態では、寝台装置130の天板133の長手方向をZ軸方向(前後方向)、Z軸方向に直交し、床面に対して水平である軸をX軸方向(周方向)、Z軸方向に直交し、床面に対して垂直である方向をY軸方向(上下方向)とそれぞれ定義する。
架台装置110は、例えば、X線管10と、ウェッジ112と、コリメータ113と、X線高電圧装置114と、X線検出器115と、データ収集システム(以下、DAS:Data Acquisition System)116と、回転フレーム117と、制御装置40と、を備える。X線管10、ウェッジ112、コリメータ113、X線高電圧装置114、X線検出器115、DAS116、及び回転フレーム117は、架台装置110における架台筐体に収容される。
X線管10は、第1の実施形態で用いたものと共通である、ウェッジ112は、X線管10から被検体Pに照射されるX線量を調節するためのフィルタである。ウェッジ112は、X線管10から被検体Pに照射されるX線量の分布が予め定められた分布になるように、自身を透過するX線を減衰させる。ウェッジ112は、ウェッジフィルタ(wedge filter)、ボウタイフィルタ(bow-tie filter)とも呼ばれる。ウェッジ112は、例えば、所定のターゲット角度や所定の厚みとなるようにアルミニウムを加工したものである。
コリメータ113は、ウェッジ112を透過したX線の照射範囲を絞り込むための機構である。コリメータ113は、例えば、複数の鉛板の組み合わせによってスリットを形成することで、X線の照射範囲を絞り込む。コリメータ113は、X線絞りと呼ばれる場合もある。コリメータ113の絞り込み範囲は、機械的に駆動可能であってよい。
X線高電圧装置114は、例えば、高電圧発生装置と、X線制御装置とを有する。高電圧発生装置は、変圧器(トランス)及び整流器などを含む電気回路を有し、X線管10に印加する高電圧を発生させる。X線制御装置は、X線管10に発生させるべきX線量に応じて高電圧発生装置の出力電圧を制御する。高電圧発生装置は、上述した変圧器によって昇圧を行うものであってもよいし、インバータによって昇圧を行うものであってもよい。X線高電圧装置114は、回転フレーム117に設けられてもよいし、架台装置110の固定フレーム(不図示)の側に設けられてもよい。
X線検出器115は、X線管10が発生させ、被検体Pを通過して入射したX線の強度を検出する。X線検出器115は、検出したX線の強度に応じた電気信号(光信号などでもよい)をDAS116に出力する。X線検出器115は、例えば、複数のX線検出素子列を有する。複数のX線検出素子列のそれぞれは、X線管10の焦点を中心とした円弧に沿ってチャネル方向に複数のX線検出素子が配列されたものである。複数のX線検出素子列は、スライス方向(列方向、row方向)に配列される。X線検出器115は、X線管10のターゲット13が放出するX線を検出する。X線検出器115は、検出部の一例である。
X線検出器115は、例えば、グリッドと、シンチレータアレイと、光センサアレイとを有する間接型の検出器である。シンチレータアレイは、複数のシンチレータを有する。それぞれのシンチレータは、シンチレータ結晶を有する。シンチレータ結晶は、入射するX線の強度に応じた光量の光を発する。グリッドは、シンチレータアレイのX線が入射する面に配置され、散乱X線を吸収する機能を有するX線遮蔽板を有する。なお、グリッドは、コリメータ(一次元コリメータまたは二次元コリメータ)と呼ばれる場合もある。光センサアレイは、例えば、光電子増倍管(フォトマルチプライヤー:PMT)等の光センサを有する。光センサアレイは、シンチレータにより発せられる光の光量に応じた電気信号を出力する。X線検出器115は、入射したX線を電気信号に変換する半導体素子を有する直接変換型の検出器であってもよい。
DAS116は、例えば、増幅器と、積分器と、A/D変換器とを有する。増幅器は、X線検出器115の各X線検出素子により出力される電気信号に対して増幅処理を行う。積分器は、増幅処理が行われた電気信号をビュー期間(後述)に亘って積分する。A/D変換器は、積分結果を示す電気信号をデジタル信号に変換する。DAS116は、デジタル信号に基づく検出データをコンソール装置140に出力する。検出データは、生成元のX線検出素子のチャンネル番号、列番号、及び収集されたビューを示すビュー番号により識別されたX線強度のデジタル値である。ビュー番号は、回転フレーム117の回転に応じて変化する番号であり、例えば、回転フレーム117の回転に応じてインクリメントされる番号である。従って、ビュー番号は、X線管10の回転角度を示す情報である。ビュー期間とは、あるビュー番号に対応する回転角度から、次のビュー番号に対応する回転角度に到達するまでの間に収まる期間である。DAS116は、ビューの切り替わりを、制御装置40から入力されるタイミング信号によって検知してもよいし、内部のタイマーによって検知してもよいし、図示しないセンサから取得される信号によって検知してもよい。フルスキャンを行う場合においてX線管10によりX線が連続曝射されている場合、DAS116は、全周囲分(360度分)の検出データ群を収集する。ハーフスキャンを行う場合においてX線管10によりX線が連続曝射されている場合、DAS116は、半周囲分(180度分)の検出データを収集する。
X線CT装置100は、例えば、X線管10とX線検出器115の双方が回転フレーム117によって支持されて被検体Pの周囲を回転するRotate/Rotate-TypeのX線CT装置(第3世代CT)であるが、これに限らず、円環状に配列された複数のX線検出素子が固定フレームに固定され、X線管10が被検体Pの周囲を回転するStationary/Rotate-TypeのX線CT装置(第4世代CT)であってもよい。X線CT装置100は、X線撮影装置の一例である。
寝台装置130は、スキャン対象の被検体Pを載置して移動させ、架台装置110の回転フレーム117の内部に導入する装置である。寝台装置130は、例えば、基台131と、寝台駆動装置132と、天板133と、支持フレーム134とを備える。架台装置110は、中央に開口を備える。寝台装置130の天板133は、架台装置110の開口に挿入される。
基台131は、支持フレーム134を鉛直方向(Y軸方向)に移動可能に支持する筐体を含む。寝台駆動装置132は、モータやアクチュエータを含む。寝台駆動装置132は、被検体Pが載置された天板133を、支持フレーム134に沿って、天板133の長手方向(Z軸方向)に移動させる。天板133は、被検体Pが載置される板状の部材である。寝台駆動装置132は、天板133を後退させて架台装置110の開口に挿入させる。寝台駆動装置132は、天板133を前進させて架台装置110から引き抜く。
寝台駆動装置132は、天板133だけでなく、支持フレーム134を天板133の長手方向に移動させてもよい。また、上記とは逆に、架台装置110がZ軸方向に移動可能であり、架台装置110の移動によって回転フレーム117が被検体Pの周囲に来るように制御されてもよい。また、架台装置110と天板133の双方が移動可能な構成でもよい。
コンソール装置140は、例えば、メモリ141と、ディスプレイ142と、入力インターフェース143と、処理回路150とを有する。実施形態では、コンソール装置140は架台装置110とは別体として説明するが、架台装置110にコンソール装置140の各構成要素の一部または全部が含まれてもよい。
メモリ141は、例えば、RAM(Random Access Memory)、フラッシュメモリ等の半導体メモリ素子、ハードディスク、光ディスク等により実現される。メモリ141は、例えば、検出データや投影データ、再構成画像データ、CT画像データ等を記憶する。これらのデータは、メモリ141ではなく(或いはメモリ141に加えて)、X線CT装置100が通信可能な外部メモリに記憶されてもよい。外部メモリは、例えば、外部メモリを管理するクラウドサーバが読み書きの要求を受け付けることで、クラウドサーバによって制御されるものである。
ディスプレイ142は、各種の情報を表示する。例えば、ディスプレイ142は、処理回路によって生成された医用画像(CT画像)や、医師や技師などの操作者による各種操作を受け付けるGUI(Graphical User Interface)画像等を表示する。ディスプレイ142は、例えば、液晶ディスプレイやCRT(Cathode Ray Tube)、有機EL(Electroluminescence)ディスプレイ等である。ディスプレイ142は、架台装置110に設けられてもよい。ディスプレイ142は、デスクトップ型でもよいし、コンソール装置140の本体部と無線通信可能な表示装置(例えばタブレット端末)でもよい。
入力インターフェース143は、操作者による各種の入力操作を受け付け、受け付けた入力操作の内容を示す電気信号を処理回路150に出力する。入力インターフェース143は、例えば、マウスやキーボード、タッチパネル、ドラッグボール、スイッチ、ボタン、ジョイスティック、カメラ、赤外線センサ、マイク等により実現される。入力インターフェース143は、コンソール装置140の本体部と無線通信可能な表示装置(例えばタブレット端末)により実現されてもよい。
処理回路150は、X線CT装置100の全体の動作を制御する。処理回路150は、例えば、制御機能151と、前処理機能152と、再構成処理機能153と、画像処理機能154とを備える。処理回路150は、例えば、ハードウェアプロセッサが記憶装置(記憶回路)に記憶されたプログラムを実行することにより、これらの機能を実現するものである。
コンソール装置140または処理回路150が有する各構成要素は、分散化されて複数のハードウェアにより実現されてもよい。処理回路150は、コンソール装置140が有する構成ではなく、コンソール装置140と通信可能な処理装置によって実現されてもよい。処理装置は、例えば、一つのX線CT装置と接続されたワークステーション、或いは、複数のX線CT装置に接続され、以下に説明する処理回路150と同等の処理を一括して実行する装置(例えばクラウドサーバ)である。
制御機能151は、入力インターフェース143が受け付けた入力操作に基づいて、処理回路150の各種機能を制御する。例えば、制御機能151は、X線高電圧装置114、DAS116、制御装置40、及び寝台駆動装置132を制御することで、架台装置110における検出データの収集処理等を実行する。
前処理機能152は、DAS116により出力された検出データに対して対数変換処理やオフセット補正処理、チャネル間の感度補正処理、ビームハードニング補正等の前処理を行い、投影データを生成し、生成した投影データをメモリ141に記憶させる。
再構成処理機能153は、前処理機能152によって生成された投影データに対して、フィルタ補正逆投影法や逐次近似再構成法等による再構成処理を行って、CT画像データを生成し、生成したCT画像データをメモリ141に記憶させる。
画像処理機能154は、入力インターフェース143が受け付けた入力操作に基づいて、CT画像データを公知の方法により、三次元画像データや任意断面の断面像データに変換する。三次元画像データへの変換は、前処理機能152によって行われてもよい。画像処理機能154は、X線検出器115が検出したX線に基づく画像を生成する。画像処理機能154は、生成部の一例である。
X線管10には、第1の実施形態と同様の加振器20が取り付けられている。X線検出器115には、加速度センサ33が取り付けられている。加速度センサ33は、X線検出器115の振動を検出する。X線検出器115には、ターゲット13が回転すると、ターゲット13の回転に伴って発生する振動が架台筐体を介して伝達される。このため、X線検出器115は、ターゲット13が回転することによって振動する。X線検出器115の振動は、回転陽極の回転に応じた振動の一例である。
以上説明した第3の実施形態のX線CT装置100では、X線管10のターゲット13が回転し、X線CT装置100の振動が大きくなると、加振器20を回転させることによって、X線CT装置100の振動を打ち消す。振動子24は、ターゲット13と同期して回転するので、ターゲット13の回転に起因するX線CT装置100振動を、振動子24の回転によって抑制することができる。
第3の実施形態において、加速度センサ33は、X線検出器115に取り付けられている。このため、制御装置40は、X線CT装置100におけるX線検出器115の振動を抑制するように、振動子24を回転させる。したがって、X線検出器115によって得られる検出結果の精度を高めることができる。
第3の実施形態において、X線撮影装置は、X線CT装置100としているが、X線撮影装置は、他の装置としてもよい。例えば、X線撮影装置は、側面視してC字形状をなすアームの先端にX線管装置が設けられ、アームの他端にX線検出器が設けられたCアーム型X線診断装置としてもよい。
以上説明した少なくとも1つの実施形態によれば、陰極から放出される熱電子を受けてX線を放出する回転陽極と、前記回転陽極を少なくとも保持するハウジングと、前記ハウジングに取り付けられ、回転することで振動を与える加振器と、を持ち、前記加振器の第1回転軸は前記回転陽極の第2回転軸と平行に設けられることにより、回転陽極の回転に伴って生じる振動を抑制することができる。
いくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
以上の実施形態に関し、発明の一側面及び選択的な特徴として以下の付記を開示する。
(付記1)
陰極から放出される熱電子を受けてX線を放出する回転陽極と、
前記回転陽極を少なくとも保持するハウジングと、
前記ハウジングに取り付けられ、回転することで振動を与える加振器と、を備え、
前記加振器の第1回転軸は前記回転陽極の第2回転軸と平行に設けられる、
X線管装置。
(付記2)
前記第1回転軸は、前記第2回転軸と同軸に配置されてよい。
(付記3)
前記回転陽極の回転速度及び位相のうち少なくともいずれか一方を検出するセンサと、
前記センサにより検出された検出情報に基づいて、前記加振器を制御する制御部と、を更に備えてよい。
(付記4)
前記加振器は、前記第1回転軸周りに回転する振動子と、
前記振動子を前記第1回転軸に対して偏心させる偏心部と、を備えてよい。
(付記5)
前記偏心部は、前記振動子の移動を案内する案内部と、
前記振動子を移動させる動力源と、を備えてよい。
(付記6)
前記回転陽極の回転に応じた振動を検出する加速度センサを更に備えてよい。
(付記7)
前記加速度センサは、前記ハウジングに設けられてよい。
(付記8)
前記回転陽極の回転に応じた振動を検出する加速度センサを更に備え、
前記加振器は、前記第1回転軸周りに回転する振動子と、
前記振動子を前記第1回転軸に対して偏心させる偏心部と、を備え、
前記偏心部は、前記振動子の移動を案内する案内部と、
前記振動子を移動させる動力源と、を備え、
前記制御部は、前記加速度センサにより検出された加速度情報に基づいて、前記動力源を作動させて前記振動子を移動させてよい。
(付記9)
上記のうちいずれかのX線管装置と、
前記回転陽極が放出するX線を検出する検出部と、
前記検出部が検出したX線に基づく画像を生成する生成部と、を備える、
X線撮影装置。
(付記10)
上記のX線管装置と、
前記回転陽極が放出するX線を検出する検出部と、
前記検出部が検出したX線に基づく画像を生成する生成部と、を備え、
前記加速度センサは、前記検出部に設けられる、
X線撮影装置。
(付記11)
前記第2回転軸をモータによって回転させてよい。
(付記12)
前記モータは、前記第2回転軸の回転に同期させて前記第1回転軸を回転させてよい。
(付記13)
前記振動子は、前記第1回転軸に交差する方向に沿って伸びる長孔を備え、前記長孔に前記第2軸に貫通してよい。
(付記14)
前記振動子を移動させる内部モータを備え、
前記内部モータの駆動力が伝達機構を介して前記振動子に伝達されてもよい。
(付記15)
前記X線管装置のバランス解析の結果に基づいて、前記加振器が与える振動の大きさを調整してよい。
(付記16)
前記回転陽極と前記第1回転軸の間に、流体軸受が設けられてよい。
(付記1)
陰極から放出される熱電子を受けてX線を放出する回転陽極と、
前記回転陽極を少なくとも保持するハウジングと、
前記ハウジングに取り付けられ、回転することで振動を与える加振器と、を備え、
前記加振器の第1回転軸は前記回転陽極の第2回転軸と平行に設けられる、
X線管装置。
(付記2)
前記第1回転軸は、前記第2回転軸と同軸に配置されてよい。
(付記3)
前記回転陽極の回転速度及び位相のうち少なくともいずれか一方を検出するセンサと、
前記センサにより検出された検出情報に基づいて、前記加振器を制御する制御部と、を更に備えてよい。
(付記4)
前記加振器は、前記第1回転軸周りに回転する振動子と、
前記振動子を前記第1回転軸に対して偏心させる偏心部と、を備えてよい。
(付記5)
前記偏心部は、前記振動子の移動を案内する案内部と、
前記振動子を移動させる動力源と、を備えてよい。
(付記6)
前記回転陽極の回転に応じた振動を検出する加速度センサを更に備えてよい。
(付記7)
前記加速度センサは、前記ハウジングに設けられてよい。
(付記8)
前記回転陽極の回転に応じた振動を検出する加速度センサを更に備え、
前記加振器は、前記第1回転軸周りに回転する振動子と、
前記振動子を前記第1回転軸に対して偏心させる偏心部と、を備え、
前記偏心部は、前記振動子の移動を案内する案内部と、
前記振動子を移動させる動力源と、を備え、
前記制御部は、前記加速度センサにより検出された加速度情報に基づいて、前記動力源を作動させて前記振動子を移動させてよい。
(付記9)
上記のうちいずれかのX線管装置と、
前記回転陽極が放出するX線を検出する検出部と、
前記検出部が検出したX線に基づく画像を生成する生成部と、を備える、
X線撮影装置。
(付記10)
上記のX線管装置と、
前記回転陽極が放出するX線を検出する検出部と、
前記検出部が検出したX線に基づく画像を生成する生成部と、を備え、
前記加速度センサは、前記検出部に設けられる、
X線撮影装置。
(付記11)
前記第2回転軸をモータによって回転させてよい。
(付記12)
前記モータは、前記第2回転軸の回転に同期させて前記第1回転軸を回転させてよい。
(付記13)
前記振動子は、前記第1回転軸に交差する方向に沿って伸びる長孔を備え、前記長孔に前記第2軸に貫通してよい。
(付記14)
前記振動子を移動させる内部モータを備え、
前記内部モータの駆動力が伝達機構を介して前記振動子に伝達されてもよい。
(付記15)
前記X線管装置のバランス解析の結果に基づいて、前記加振器が与える振動の大きさを調整してよい。
(付記16)
前記回転陽極と前記第1回転軸の間に、流体軸受が設けられてよい。
1,2…X線管装置
10…X線管
11…ハウジング
12…真空容器
13…ターゲット
14…ロータ
15…カソード(陰極)
16…ステータ
17…第2回転軸
18…流体軸受
20…加振器
21…ケース
22…モータ
23…第1回転軸
24…振動子
25…長孔
30…センサ類
31…第1速度位置センサ
32…第2速度位置センサ
33…加速度センサ
40…制御装置
41,143…入力インターフェース
42…送受信回路
43,150…処理回路
51…検出機能
52…振動解析機能
53…判定機能
54…回転制御機能
55…バランス解析機能
56…調整機能
60…可動式振動子
62…内部モータ
68…第1振動子
69…第2振動子
100…X線CT装置
110…架台装置
112…ウェッジ
113…コリメータ
114…X線高電圧装置
115…X線検出器
116…DAS
117…回転フレーム
130…寝台装置
131…基台
132…寝台駆動装置
133…天板
134…支持フレーム
140…コンソール装置
141…メモリ
142…ディスプレイ
151…制御機能
152…前処理機能
153…再構成処理機能
154…画像処理機能
L…X線
P…被検体
10…X線管
11…ハウジング
12…真空容器
13…ターゲット
14…ロータ
15…カソード(陰極)
16…ステータ
17…第2回転軸
18…流体軸受
20…加振器
21…ケース
22…モータ
23…第1回転軸
24…振動子
25…長孔
30…センサ類
31…第1速度位置センサ
32…第2速度位置センサ
33…加速度センサ
40…制御装置
41,143…入力インターフェース
42…送受信回路
43,150…処理回路
51…検出機能
52…振動解析機能
53…判定機能
54…回転制御機能
55…バランス解析機能
56…調整機能
60…可動式振動子
62…内部モータ
68…第1振動子
69…第2振動子
100…X線CT装置
110…架台装置
112…ウェッジ
113…コリメータ
114…X線高電圧装置
115…X線検出器
116…DAS
117…回転フレーム
130…寝台装置
131…基台
132…寝台駆動装置
133…天板
134…支持フレーム
140…コンソール装置
141…メモリ
142…ディスプレイ
151…制御機能
152…前処理機能
153…再構成処理機能
154…画像処理機能
L…X線
P…被検体
Claims (10)
- 陰極から放出される熱電子を受けてX線を放出する回転陽極と、
前記回転陽極を少なくとも保持するハウジングと、
前記ハウジングに取り付けられ、回転することで振動を与える加振器と、を備え、
前記加振器の第1回転軸は前記回転陽極の第2回転軸と平行に設けられる、
X線管装置。 - 前記第1回転軸は、前記第2回転軸と同軸に配置される、
請求項1に記載のX線管装置。 - 前記回転陽極の回転速度及び位相のうち少なくともいずれか一方を検出するセンサと、
前記センサにより検出された検出情報に基づいて、前記加振器を制御する制御部と、を更に備える、
請求項1または2に記載のX線管装置。 - 前記加振器は、前記第1回転軸周りに回転する振動子と、
前記振動子を前記第1回転軸に対して偏心させる偏心部と、を備える、
請求項1または2に記載のX線管装置。 - 前記偏心部は、前記振動子の移動を案内する案内部と、
前記振動子を移動させる動力源と、を備える、
請求項4に記載のX線管装置。 - 前記回転陽極の回転に応じた振動を検出する加速度センサを更に備える、
請求項4または5に記載にX線管装置。 - 前記加速度センサは、前記ハウジングに設けられる、
請求項6に記載のX線管装置。 - 前記回転陽極の回転に応じた振動を検出する加速度センサを更に備え、
前記加振器は、前記第1回転軸周りに回転する振動子と、
前記振動子を前記第1回転軸に対して偏心させる偏心部と、を備え、
前記偏心部は、前記振動子の移動を案内する案内部と、
前記振動子を移動させる動力源と、を備え、
前記制御部は、前記加速度センサにより検出された加速度情報に基づいて、前記動力源を作動させて前記振動子を移動させる、
請求項3に記載のX線管装置。 - 請求項1から7のうちいずれか1項に記載のX線管装置と、
前記回転陽極が放出するX線を検出する検出部と、
前記検出部が検出したX線に基づく画像を生成する生成部と、を備える、
X線撮影装置。 - 請求項8に記載のX線管装置と、
前記回転陽極が放出するX線を検出する検出部と、
前記検出部が検出したX線に基づく画像を生成する生成部と、を備え、
前記加速度センサは、前記検出部に設けられる、
X線撮影装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020210137A JP2022096889A (ja) | 2020-12-18 | 2020-12-18 | X線管装置及びx線撮影装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020210137A JP2022096889A (ja) | 2020-12-18 | 2020-12-18 | X線管装置及びx線撮影装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2022096889A true JP2022096889A (ja) | 2022-06-30 |
Family
ID=82164956
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020210137A Pending JP2022096889A (ja) | 2020-12-18 | 2020-12-18 | X線管装置及びx線撮影装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2022096889A (ja) |
-
2020
- 2020-12-18 JP JP2020210137A patent/JP2022096889A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7361568B2 (ja) | X線撮影装置および単色x線生成方法 | |
| JP2020115975A (ja) | X線ct装置及び撮影計画装置 | |
| JP7224829B2 (ja) | 医用画像処理装置および方法 | |
| JP7199920B2 (ja) | X線コンピュータ断層撮影装置 | |
| JP7106392B2 (ja) | 感度補正方法及び光子計数型検出器 | |
| JP2022096889A (ja) | X線管装置及びx線撮影装置 | |
| JP2017113083A (ja) | 医用画像診断装置 | |
| JP2023154102A (ja) | 医用画像診断装置 | |
| JP2020018766A (ja) | 放射線検出器及び放射線検出器モジュール | |
| JP7399780B2 (ja) | 医用画像診断装置 | |
| JP2024057817A (ja) | X線コンピュータ断層撮影装置、医用画像補正方法、および医用画像補正プログラム | |
| JP7224208B2 (ja) | 医用処理装置、および医用診断システム | |
| JP2022103615A (ja) | X線コンピュータ断層撮影装置、陽極劣化推定方法、および陽極劣化推定プログラム | |
| JP2021112380A (ja) | X線ct装置 | |
| JP2020174783A (ja) | X線ct装置、x線ctシステム及び制御プログラム | |
| US20240423564A1 (en) | X-ray image diagnostic system, x-ray image diagnostic method, and storage medium | |
| JP2020074826A (ja) | X線ct装置および検出器ユニット | |
| JP7725189B2 (ja) | X線ct装置 | |
| JP7224880B2 (ja) | X線撮影装置 | |
| JP7258473B2 (ja) | X線ct装置及び撮影条件管理装置 | |
| JP2024048076A (ja) | 光子計数型x線ct装置、撮影方法、およびプログラム | |
| JP7062514B2 (ja) | X線ct装置、およびx線管制御装置 | |
| JP2024030428A (ja) | スペクトラルイメージングx線ct装置、画像ガイド下表示方法、および画像ガイド下表示プログラム | |
| JP7043303B2 (ja) | X線コンピュータ断層撮影装置 | |
| JP2024017301A (ja) | 医療用画像診断装置及び医療用画像診断装置の作動方法 |