JP2022011908A - 経路選択装置および経路選択方法 - Google Patents
経路選択装置および経路選択方法 Download PDFInfo
- Publication number
- JP2022011908A JP2022011908A JP2020113332A JP2020113332A JP2022011908A JP 2022011908 A JP2022011908 A JP 2022011908A JP 2020113332 A JP2020113332 A JP 2020113332A JP 2020113332 A JP2020113332 A JP 2020113332A JP 2022011908 A JP2022011908 A JP 2022011908A
- Authority
- JP
- Japan
- Prior art keywords
- lane change
- route
- point
- change point
- lane
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
- G01C21/3461—Preferred or disfavoured areas, e.g. dangerous zones, toll or emission zones, intersections, manoeuvre types or segments such as motorways, toll roads or ferries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0011—Planning or execution of driving tasks involving control alternatives for a single driving scenario, e.g. planning several paths to avoid obstacles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0019—Control system elements or transfer functions
- B60W2050/0022—Gains, weighting coefficients or weighting functions
- B60W2050/0025—Transfer function weighting factor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/10—Number of lanes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/53—Road markings, e.g. lane marker or crosswalk
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
- G06T2207/30256—Lane; Road marking
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
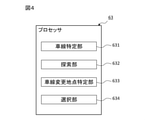
6 経路選択装置
631 車線特定部
632 探索部
633 車線変更地点特定部
634 選択部
Claims (7)
- 車両が現在走行中の車線の位置を特定する車線特定部と、
前記車両の現在位置から、出発地から目的地に至る経路における前記現在位置と前記目的地との間のいずれかの通過点に至る複数の部分経路の候補を探索する探索部と、
探索された前記複数の部分経路の候補のそれぞれにおいて、車線変更が行われる車線変更地点を特定する車線変更地点特定部と、
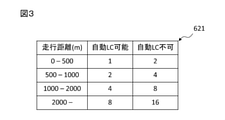
探索された前記複数の部分経路の候補のうち、特定された前記車線変更地点の位置、または、前記車線変更地点を自動走行可能か否かに応じて重みづけされた前記車線変更地点の点数の合計が最も小さい部分経路の候補を、部分経路として選択する選択部と、
を備える経路選択装置。 - 前記車線変更地点の点数は、前記通過点から近い前記車線変更地点の点数が前記通過点から遠い前記車線変更地点の点数よりも小さくなるように重みづけされる、請求項1に記載の経路選択装置。
- 前記車線変更地点の点数は、自動走行可能な車線変更地点の点数が自動走行可能でない車線変更地点の点数よりも小さくなるように重みづけされる、請求項1または2に記載の経路選択装置。
- 前記車線変更地点の点数は、隣接する車線変更地点との間の間隔が短いほど大きくなるように重みづけされる、請求項1-3のいずれか一項に記載の経路選択装置。
- 前記選択部は、前記車線変更地点の点数の合計が同じである前記複数の部分経路の候補のうち、含まれる車線変更地点の少ない部分経路の候補を部分経路として選択する、請求項1-4のいずれか一項に記載の経路選択装置。
- 前記選択部は、探索された前記複数の部分経路の候補のうち、前記現在位置と前記通過点との間の走行距離と自動走行の制御に用いられている経路における前記現在位置と前記通過点との間の走行距離との差が距離差分閾値を超える部分経路の候補を除外して前記部分経路の選択を行う、請求項1-5のいずれか一項に記載の経路選択装置。
- 車両が現在走行中の車線の位置を特定し、
前記車両の現在位置から、出発地から目的地に至る経路における前記現在位置と前記目的地との間のいずれかの通過点に至る複数の部分経路の候補を探索し、
探索された前記複数の部分経路の候補のそれぞれにおいて、車線変更が行われる車線変更地点を特定し、
探索された前記複数の部分経路の候補のうち、特定された前記車線変更地点の位置、または、前記車線変更地点を自動走行可能か否かに応じて重みづけされた前記車線変更地点の点数の合計が最も小さい部分経路の候補を、部分経路として選択する、
ことを含む経路選択方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020113332A JP7294254B2 (ja) | 2020-06-30 | 2020-06-30 | 経路選択装置および経路選択方法 |
| US17/349,553 US11946758B2 (en) | 2020-06-30 | 2021-06-16 | Route selection device and method |
| CN202110708817.4A CN113859239B (zh) | 2020-06-30 | 2021-06-25 | 路径选择装置及路径选择方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020113332A JP7294254B2 (ja) | 2020-06-30 | 2020-06-30 | 経路選択装置および経路選択方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022011908A true JP2022011908A (ja) | 2022-01-17 |
| JP7294254B2 JP7294254B2 (ja) | 2023-06-20 |
Family
ID=78989927
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020113332A Active JP7294254B2 (ja) | 2020-06-30 | 2020-06-30 | 経路選択装置および経路選択方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11946758B2 (ja) |
| JP (1) | JP7294254B2 (ja) |
| CN (1) | CN113859239B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023145272A1 (ja) * | 2022-01-31 | 2023-08-03 | 株式会社デンソー | 提示制御装置、提示制御プログラム、自動運転制御装置、及び自動運転制御プログラム |
| JP2023111830A (ja) * | 2022-01-31 | 2023-08-10 | 株式会社デンソー | 提示制御装置、提示制御プログラム、自動運転制御装置、及び自動運転制御プログラム |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015158467A (ja) * | 2014-02-25 | 2015-09-03 | アイシン・エィ・ダブリュ株式会社 | 経路探索システム、経路探索方法、コンピュータプログラム及びコストテーブルのデータ構造 |
| JP2017030436A (ja) * | 2015-07-30 | 2017-02-09 | クラリオン株式会社 | 方向指示器の点灯制御装置 |
| WO2018073887A1 (ja) * | 2016-10-18 | 2018-04-26 | 本田技研工業株式会社 | 車両制御装置 |
| JP2018095149A (ja) * | 2016-12-15 | 2018-06-21 | 本田技研工業株式会社 | 軌道評価装置、軌道評価方法、および軌道評価プログラム |
| US20190171206A1 (en) * | 2017-12-05 | 2019-06-06 | Waymo Llc | Real-time lane change selection for autonomous vehicles |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5039455B2 (ja) | 2007-06-29 | 2012-10-03 | パナソニック株式会社 | ナビゲーション装置 |
| JP2011038794A (ja) | 2009-08-06 | 2011-02-24 | Sumitomo Electric System Solutions Co Ltd | 経路探索装置、経路探索方法、コンピュータプログラム及び地図データベース |
| JP5692628B2 (ja) * | 2010-02-26 | 2015-04-01 | アイシン・エィ・ダブリュ株式会社 | ナビゲーション装置、及びナビゲーションプログラム |
| JP5585406B2 (ja) * | 2010-11-15 | 2014-09-10 | 株式会社デンソー | 経路探索装置、経路探索方法、経路案内装置および経路案内方法 |
| US9404761B2 (en) | 2014-05-30 | 2016-08-02 | Nissan North America, Inc. | Autonomous vehicle lane routing and navigation |
| JP7046359B2 (ja) * | 2018-04-24 | 2022-04-04 | シャロン株式会社 | 運転制御装置および自動走行装置 |
| US10691130B2 (en) * | 2018-06-06 | 2020-06-23 | Uatc, Llc | Gridlock solver for motion planning system of an autonomous vehicle |
| JP6664441B2 (ja) * | 2018-07-23 | 2020-03-13 | 株式会社ゼンリン | 車両制御システム及び地図データのデータ構造 |
| JP7048444B2 (ja) | 2018-07-27 | 2022-04-05 | 株式会社アイシン | 経路探索システムおよび経路探索プログラム |
| US10809733B2 (en) * | 2018-10-16 | 2020-10-20 | GM Global Technology Operations LLC | Intelligent motor vehicles, systems, and control logic for driver behavior coaching and on-demand mobile charging |
| GB2579020B (en) * | 2018-11-14 | 2021-05-12 | Jaguar Land Rover Ltd | Vehicle control system and method |
| US20210364305A1 (en) * | 2020-05-19 | 2021-11-25 | Gm Cruise Holdings Llc | Routing autonomous vehicles based on lane-level performance |
-
2020
- 2020-06-30 JP JP2020113332A patent/JP7294254B2/ja active Active
-
2021
- 2021-06-16 US US17/349,553 patent/US11946758B2/en active Active
- 2021-06-25 CN CN202110708817.4A patent/CN113859239B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015158467A (ja) * | 2014-02-25 | 2015-09-03 | アイシン・エィ・ダブリュ株式会社 | 経路探索システム、経路探索方法、コンピュータプログラム及びコストテーブルのデータ構造 |
| JP2017030436A (ja) * | 2015-07-30 | 2017-02-09 | クラリオン株式会社 | 方向指示器の点灯制御装置 |
| WO2018073887A1 (ja) * | 2016-10-18 | 2018-04-26 | 本田技研工業株式会社 | 車両制御装置 |
| JP2018095149A (ja) * | 2016-12-15 | 2018-06-21 | 本田技研工業株式会社 | 軌道評価装置、軌道評価方法、および軌道評価プログラム |
| US20190171206A1 (en) * | 2017-12-05 | 2019-06-06 | Waymo Llc | Real-time lane change selection for autonomous vehicles |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023145272A1 (ja) * | 2022-01-31 | 2023-08-03 | 株式会社デンソー | 提示制御装置、提示制御プログラム、自動運転制御装置、及び自動運転制御プログラム |
| JP2023111830A (ja) * | 2022-01-31 | 2023-08-10 | 株式会社デンソー | 提示制御装置、提示制御プログラム、自動運転制御装置、及び自動運転制御プログラム |
| JP7597097B2 (ja) | 2022-01-31 | 2024-12-10 | 株式会社デンソー | 提示制御装置、提示制御プログラム、自動運転制御装置、及び自動運転制御プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113859239B (zh) | 2024-04-05 |
| CN113859239A (zh) | 2021-12-31 |
| JP7294254B2 (ja) | 2023-06-20 |
| US11946758B2 (en) | 2024-04-02 |
| US20210403028A1 (en) | 2021-12-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6036371B2 (ja) | 車両用運転支援システム及び運転支援方法 | |
| KR101076538B1 (ko) | 경로 안내 시스템 및 프로그램 | |
| US20100017117A1 (en) | Navigation system and lane information display method | |
| RU2661963C1 (ru) | Устройство вычисления маршрута движения | |
| JP5674567B2 (ja) | ナビゲーション装置 | |
| JP2005189008A (ja) | ナビゲーション装置及びナビゲーションシステム | |
| WO2019049323A1 (ja) | 運転支援方法及び運転支援装置 | |
| JP7662087B2 (ja) | 車両制御装置、地点通知方法及び地点通知用コンピュータプログラム | |
| JP2015145849A (ja) | ナビゲーション装置、ナビゲーション方法及びプログラム | |
| US11959767B2 (en) | Map information assessment device, storage medium storing computer program for map information assessment, and map information assessment method | |
| JP2020008681A (ja) | データ構造 | |
| KR102085464B1 (ko) | 경로 탐색 장치 및 경로 탐색 방법 | |
| US7970536B2 (en) | Navigation system | |
| US20200209007A1 (en) | Lane guidance system and lane guidance program | |
| JP2018151822A (ja) | 電子装置、走行レーン検出プログラムおよび走行レーン検出方法 | |
| CN113859239B (zh) | 路径选择装置及路径选择方法 | |
| JP2006189326A (ja) | 走行車両の次道路予測装置 | |
| US11898861B2 (en) | Road zone assessment device, medium storing computer program for road zone assessment, and road zone assessment method | |
| JP2023169631A (ja) | 車両制御装置、車両制御方法及び車両制御用コンピュータプログラム | |
| JP2020008401A (ja) | 情報処理装置 | |
| JP3964230B2 (ja) | 車載用ナビゲーション装置 | |
| JP2010071810A (ja) | レーン判定装置及びレーン判定プログラム、並びにそれを用いたナビゲーション装置 | |
| JP2020101422A (ja) | 運転支援装置および該方法 | |
| JP2022158005A (ja) | 走行制御装置 | |
| JP2007132828A (ja) | ナビゲーション装置および経路探索方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211015 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220922 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221004 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221101 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230307 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230509 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230522 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7294254 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |