JP2019210152A - 自動倉庫システム - Google Patents
自動倉庫システム Download PDFInfo
- Publication number
- JP2019210152A JP2019210152A JP2019169091A JP2019169091A JP2019210152A JP 2019210152 A JP2019210152 A JP 2019210152A JP 2019169091 A JP2019169091 A JP 2019169091A JP 2019169091 A JP2019169091 A JP 2019169091A JP 2019210152 A JP2019210152 A JP 2019210152A
- Authority
- JP
- Japan
- Prior art keywords
- load
- storage
- storage shelf
- automatic warehouse
- warehouse system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images















Landscapes
- Warehouses Or Storage Devices (AREA)
Abstract
Description
自動倉庫システムとして、対面する二つの保管棚の間にスタッカークレーンが走行する走行スペースを設ける構成が考えられる。この倉庫では、入庫する荷をフォークリフトで各保管棚に設けた置台上に移載し、その荷をスタッカークレーンが棚の所定の収容部に移動して収容する。この構成では、対面する二つの保管棚ごとに、スタッカークレーンの走行スペースを設けることになり、スタッカークレーンの走行スペースの分だけ荷の保管スペースが減ってしまう。このため、保管スペースを増やすように、スタッカークレーンの走行スペースを保管棚で埋めてしまうことも考えられるが、この場合、スタッカークレーンが保管棚間へ進入できなくなり、荷の取り出しが難しくなる。このことから、本発明者は、自動倉庫システムには荷の保管スペースを増やしつつ、荷の取り出しを容易にする観点から改善すべき課題があることを認識した。
このような課題はスタッカークレーンを用いる自動倉庫システムに限られず他の種類の自動倉庫システムについても生じうる。
自動倉庫システムとして、スタッカークレーンの走行スペースの両側に、対面する二つの保管棚を設ける構成が考えられる。しかしこの構成では、2列の保管棚ごとに走行スペースを設けることになり、その分、荷を保管するスペースが減ってしまう。一方で、走行スペースを保管棚で埋めるとすると、保管棚間にスタッカークレーンが進入できなくなり、荷の取り出しが難しくなる。これらのことから、本発明者は、自動倉庫システムには荷の保管スペースを増やすことと、荷の取り出しを容易にすることとは、二律背反の関係にあることを認識した。
実施の形態はこのような思索に基づいて案出されたもので、以下にその具体的な構成を説明する。
また、第1、第2などの序数を含む用語は多様な構成要素を説明するために用いられるが、この用語は一つの構成要素を他の構成要素から区別する目的でのみ用いられ、この用語によって構成要素が限定されるものではない。
図1は、実施の形態に係る自動倉庫システム10の斜視図である。図2は自動倉庫システム10の平面図である。実施の形態に係る自動倉庫システム10は、多数の荷12を入庫・出庫可能な自動倉庫を含むシステムである。以下、XYZ直交座標系をもとに説明する。X軸方向は水平な左右方向に対応し、Y軸方向は水平な前後方向に対応し、Z軸方向は鉛直な上下方向に対応する。Y軸方向、Z軸方向はそれぞれX軸方向に直交する。特に、後述する行方向および列方向は、それぞれX軸方向およびY軸方向に対応する。入出庫では、パレットを用いずに荷12を単独で扱うようにしてもよいが、実施の形態では荷12をパレット12pに載せた状態で扱うようにしている。以下、荷12をパレット12pに載せた状態で搬送することを、単に荷12を搬送するという。
次に中間搬送装置40について説明する。中間搬送装置40は、保管棚部20と収容棚部30との間で荷12の搬送を行う搬送機構である。中間搬送装置40は荷を搬送可能であれば構造に特別な制限はないが、実施の形態の中間搬送装置40は、複数の軌条と、この軌条を走行する複数の台車と、を含んでいる。図3は、中間搬送装置40の一例を示す平面図である。特に、中間搬送装置40は、第1軌条41と、第2軌条42と、第3軌条43と、第1台車45と、第2台車46と、を含む。図3は、第1軌条41、第2軌条42および第3軌条43の配置の一例を示している。第1軌条41は、例えば、行方向に伸びるレールの対であり、収容棚部30と保管棚部20の間の空間に設けられる。第1軌条41は、第1台車45を行方向に走行させるように各段に設けられる。
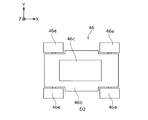
図4は、第1台車45の一例を示す平面図である。図5は、第1台車45の側面図である。第1台車45は、第1軌条41を行方向に走行して、荷12を行方向に搬送する走行台車である。第1台車45は各段の第1軌条41にそれぞれ配置される。各段に第1台車45を設けることにより、各第1台車45を独立して同時に動作させることが可能で、収容棚部30と保管棚部20との間の搬送効率を向上させることかできる。第1台車45は、車体45bと、載置部45cと、4つの車輪45dと、を主に含む。車体45bは、上下方向に偏平な略直方体形状の輪郭を有する。車体45bの内部には、車輪45dを駆動するモータ(不図示)と、このモータを駆動するバッテリー(不図示)と、これらを制御する制御回路(不図示)と、を搭載している。載置部45cは、第2台車46を載置する部分で、上面視で略矩形で、側面視で車体45bの上面から下方に後退した凹部形状を有する。
図6は、第2台車46の一例を示す平面図である。図7は、第2台車46の側面図である。図7は、第2台車46が荷12を載せた状態で第2軌条42上を走行する状態を示している。第2台車46は、第2軌条42を列方向に走行して、荷12を列方向に搬送する走行台車である。第2台車46は、各段の第2軌条42または第3軌条43にそれぞれ配置される。第2台車46は、荷12を載せた状態で第1台車45の載置部45cに進入することができる。第2台車46は、車体46bと、支持部46cと、リフト機構46dと、4つの車輪46eと、を主に含む。車体46bは、上下方向に偏平な略直方体形状の輪郭を有する。車体46bの内部には、車輪46eを駆動するモータ(不図示)と、このモータを駆動するバッテリー(不図示)と、これらを制御する制御回路(不図示)と、を搭載している。支持部46cは、荷12を持上げて保持する略矩形板状の部分である。
制御装置52は、制御部52aと、操作部52k、表示部52mと、を含む。操作部52kは、自動倉庫システム10を制御するための操作を受け入れて、その操作結果を制御部52aに出力する操作ユニットである。操作部52kは、例えば自動倉庫システム10の起動や停止などの操作を受け入れる。表示部52mは、制御部52aの制御により、自動倉庫システム10の動作状況を表示する表示ユニットである。表示部52mは、例えば、各台車の動作状況や保管部21や収容部31における荷12の保管状況などを表示するようにしてもよい。操作部52kおよび表示部52mは、例えば制御装置52の正面に設けられる。
自動倉庫システム10の出庫時の搬送動作の一例を説明する。この搬送動作は、出庫する荷12を、保管棚部20の保管部21から、収容棚部30の収容部31に搬送する動作を含む。収容部31に搬送された荷12は、外部搬送装置により搬出される。図9は、自動倉庫システム10の出庫時の搬送動作の一例を示す説明図である。図10は、出庫時の搬送動作の一例を示すフローチャートであり、この動作に関する処理S60を示している。
(1)処理S60が開始されると、制御部52aは、第2台車46を搬送元の保管部21に移動させ、出庫対象の荷12の下に進入させる(ステップS61)。
(2)制御部52aは、第2台車46の支持部46cを上昇させて荷12を保管部21から持ち上げて支持させる(ステップS62)。このとき、荷12は移動可能な状態になる。
(3)制御部52aは、荷12を載せた第2台車46を出入口部22bに向かって移動させる(ステップS63)。
(4)制御部52aは、このとき同時に、第1台車45を搬送元の保管部21の行に移動させる(ステップS64、図9(a)を参照)。
(5)制御部52aは、第1台車45が搬送元の保管部21の行に到着したか否かを判定する(ステップS65)。
(7)第1台車45が到着した場合(ステップS65のY)、制御部52aは、荷12を載せた第2台車46を出入口部22bから第1台車45の載置部45cに進入させる(ステップS66、図9(b)を参照)。
(8)制御部52aは、載置部45cに第2台車46を載せた第1台車45を、搬送先の収容部31の行に移動させる(ステップS67、図9(c)を参照)。
(9)第1台車45が搬送先に到着したら、制御部52aは、荷12を載せた第2台車46を、第1台車45から退出させて搬送先の収容部31に移動させる(ステップS68、図9(d)を参照)。
(10)第2台車46が収容部31に移動したら、制御部52aは、第2台車46の支持部46cを下降させて荷12を収容部31に降ろさせる(ステップS69)。荷12を降ろすことでこの処理S60は終了する。
収容部31に搬送された荷12は、フォークリフト50により外部出入口部31bから搬出され、トラックなどに積み入れされる。荷12を降ろした第2台車46は、例えばその位置で待機するようにしてもよい。
上述の処理S60はあくまでも一例であり、他のステップを追加したり、一部のステップを変更または削除したり、ステップの順序を入れ替えてもよい。
次に、自動倉庫システム10の入庫時の搬送動作の一例を説明する。この搬送動作は、入庫する荷12を、収容棚部30の収容部31から、保管棚部20の保管部21に搬送する動作を含む。入庫する荷12は、この搬送動作の前に外部搬送装置により収容部31に搬入される。図11は、入庫時の搬送動作の一例を示すフローチャートであり、この動作に関する処理S70を示している。
(1)処理S70が開始されると、制御部52aは、保管棚部20の搬送先である保管部21に待機していた第2台車46を、保管棚部20の出入口部22bに移動させる(ステップS71)。
(2)制御部52aは、このとき同時に、第1台車45を搬送先の保管部21の行に移動させる(ステップS72)。
(3)制御部52aは、第1台車45が搬送先の保管部21の行に到着したか否かを判定する(ステップS73)。
(5)第1台車45が到着した場合(ステップS73のY)、制御部52aは、第2台車46を出入口部22bから載置部45cに進入させる(ステップS74)。
(6)制御部52aは、載置部45cに第2台車46を載せた第1台車45を、搬送元の収容部31の行に移動させる(ステップS75)。
(7)制御部52aは、第2台車46を搬送元の収容部31にて荷12の下側に進入させる(ステップS76)。
(8)制御部52aは、第2台車46の支持部46cを上昇させて収容部31から荷12を持ち上げて支持させる(ステップS77)。
(9)制御部52aは、荷12を載せた第2台車46を、第1台車45の載置部45cに進入させる(ステップS78)。
(11)制御部52aは、荷12を載せた第2台車46を、出入口部22bから搬送先の保管部21に移動させる(ステップS80)。
(12)制御部52aは、第2台車46の支持部46cを下降させて荷12を保管部21に降ろさせる(ステップS81)。荷12を降ろすことでこの処理S70は終了する。
荷12を降ろした第2台車46は、例えばその位置で待機するようにしてもよい。
上述の処理S70はあくまでも一例であり、他のステップを追加したり、一部のステップを変更または削除したり、ステップの順序を入れ替えてもよい。
自動倉庫システム10によれば、第1台車45や第2台車46が移動している間も、フォークリフト50は別の入庫する荷12を別の収容部31に順次搬入することができる。
実施の形態の自動倉庫システム10の説明では、中間搬送装置40が昇降機構を備えない例について説明したが、これに限られない。例えば、中間搬送装置は昇降機構を有するスタッカークレーンを含んでもよい。スタッカークレーンを含むことで、荷12を行方向に搬送すると共に上下方向に昇降することができる。図12は、第1変形例に係る自動倉庫システム90の斜視図であり、図1に対応する。自動倉庫システム90は、実施の形態の自動倉庫システム10に対して、第1台車45の代わりにスタッカークレーン47を備える点で相違し、その他の構成は同様である。したがって、重複する説明を省略し、自動倉庫システム10と相違する点を中心に説明する。
次に、このように構成された第1変形例に係る自動倉庫システム90の出庫時の搬送動作の一例を説明する。この搬送動作は、出庫する荷12を、保管棚部20の第2の段(例えば最下段の保管部21から、収容棚部30の第1の段(例えば最上段)の収容部31に搬送する動作を含む。収容部31に搬送された荷12は、外部搬送装置により搬出される。図15は、自動倉庫システム90の出庫時の搬送動作の一例を示すフローチャートであり、この動作に関する処理S160を示している。
(1)処理S160が開始されると、制御部52aは、第2台車46を搬送元の保管部21に移動させ、出庫対象の荷12の下に進入させる(ステップS161)。
(2)制御部52aは、第2台車46の支持部46cを上昇させて荷12を保管部21から持ち上げて支持させる(ステップS162)。このとき、荷12は移動可能な状態になる。
(4)制御部52aは、スタッカークレーン47の載置部47cを第2の段の高さまで昇降させる(ステップS164)。
(5)制御部52aは、このとき同時に、スタッカークレーン47を搬送元の保管部21の行に移動させる(ステップS165)。
(6)制御部52aは、スタッカークレーン47が搬送元の保管部21の行に到着したか否かを判定する(ステップS166)。
(7)スタッカークレーン47が未到着の場合(ステップS166のN)、制御部52aは処理をステップS166の先頭に戻す。
(8)スタッカークレーン47が到着した場合(ステップS166のY)、制御部52aは、荷12を載せた第2台車46を出入口部22bから載置部47cに進入させる(ステップS167)。
(10)制御部52aは、スタッカークレーン47の載置部47cを第1の段の高さまで上昇させる(ステップS169)。
(11)スタッカークレーン47が搬送先に到着したら、制御部52aは、荷12を載せた第2台車46を、スタッカークレーン47から退出させて搬送先の収容部31に移動させる(ステップS170)。
(12)第2台車46が収容部31に移動したら、制御部52aは、第2台車46の支持部46cを下降させて荷12を収容部31に降ろさせる(ステップS171)。荷12を降ろすことでこの処理S160は終了する。
収容部31に搬送された荷12は、フォークリフト50により外部出入口部31bから搬出され、トラックなどに積み入れされる。荷12を降ろした第2台車46は、例えばその位置で待機するようにしてもよい。
上述の処理S160はあくまでも一例であり、他のステップを追加したり、一部のステップを変更または削除したり、ステップの順序を入れ替えてもよい。
次に、自動倉庫システム90の入庫時の搬送動作の一例を説明する。この搬送動作は、入庫する荷12を、収容棚部30の第1の段(例えば最上段)の収容部31から、保管棚部20の第2の段(例えば最下段)の保管部21に搬送する動作を含む。入庫する荷12は、この搬送動作の前に外部搬送装置により収容部31に搬入される。図16は、自動倉庫システム90の入庫時の搬送動作の一例を示すフローチャートであり、この動作に関する処理S180を示している。
(1)処理S180が開始されると、制御部52aは、保管棚部20の搬送先である保管部21に待機していた第2台車46を、保管棚部20の出入口部22bに移動させる(ステップS181)。
(2)制御部52aは、このとき同時にスタッカークレーン47を搬送先の保管部21の行に移動させる(ステップS182)。
(3)制御部52aは、スタッカークレーン47の載置部47cを第2の段の高さまで昇降させる(ステップS183)。
(4)制御部52aは、スタッカークレーン47が搬送先の保管部21の行に到着したか否かを判定する(ステップS184)。
(6)スタッカークレーン47が到着した場合(ステップS184のY)、制御部52aは、第2台車46を出入口部22bから載置部47cに進入させる(ステップS185)。
(7)制御部52aは、第2台車46を載せたスタッカークレーン47を、搬送元の収容部31の行に移動させる(ステップS186)。
(8)制御部52aは、スタッカークレーン47の載置部47cを第1の段の高さまで上昇させる(ステップS187)。
(9)制御部52aは、第2台車46を搬送元の収容部31にて荷12の下側に進入させる(ステップS188)。
(10)制御部52aは、第2台車46の支持部46cを上昇させて収容部31から荷12を持ち上げて支持させる(ステップS189)。
(11)制御部52aは、荷12を載せた第2台車46を、スタッカークレーン47の載置部47cに進入させる(ステップS190)。
(13)制御部52aは、スタッカークレーン47の載置部47cを第2の段の高さまで下降させる(ステップS192)。
(14)制御部52aは、荷12を載せた第2台車46を、出入口部22bから搬送先の保管部21に移動させる(ステップS193)。
(15)制御部52aは、支持部46cを下降させて荷12を収容部31に降ろさせる(ステップS194)。荷12を降ろすことでこの処理S180は終了する。
荷12を降ろした第2台車46は、例えばその位置で待機するようにしてもよい。
上述の処理S180はあくまでも一例であり、他のステップを追加したり、一部のステップを変更または削除したり、ステップの順序を入れ替えてもよい。
自動倉庫システム90は、スタッカークレーン47を備えることにより、収容棚部30の任意の段の収容部31と、保管棚部20の別の段の保管部21との間で荷12を搬送することができる。
実施の形態の自動倉庫システム10の説明では、中間搬送装置40は、荷を載せた状態の第2台車を第1台車の載置部に進入・退出させることで、第1台車から荷12を出し入れする例について説明したが、これに限定されない。第1台車やスタッカークレーンなどの荷を行方向に移動させる行方向移動機構が可動アームなど公知の移載機構を備え、この移載機構により、この行方向移動機構から荷を出し入れするようにしてもよい。
実施の形態の自動倉庫システム10の説明では、パレット92に載せられた荷12を搬送する例について説明したがこれに限定されない。パレット92を使用することは必須ではなく、荷12を単独の状態で搬送および収容をするようにしてもよい。
実施の形態の自動倉庫システム10の説明では、フォークリフト50を用いて収容棚部の荷を出し入れする例について説明したがこれに限定されない。例えば、クレーンを備えた移載装置など、別の種類の移載装置によって収容棚部の荷を出し入れするようにしてもよい。
実施の形態の自動倉庫システム10の説明では、第1台車45は行方向にのみ移動して、上下方向には移動しない例について説明したがこれに限定されない。例えば、第1台車45を上下方向へ昇降させる昇降装置を設けて、第1台車45を各段間で移動させるようにしてもよい。
実施の形態の自動倉庫システム10の説明では、第2台車46が搭載されたバッテリーの電力によって駆動される例について説明したがこれに限定されない。例えば、棚側に設けられた給電線などの給電機構から第2台車46へ給電するようにしてもよい。この場合、第2台車46は、給電された電力により駆動されるから、バッテリーを搭載しても搭載しなくてもよい。
実施の形態の自動倉庫システム10の説明では、第2台車46が各段の各行に設けられる例について説明したがこれに限定されない。第2台車46が各段の各行に設けられることは必須ではなく、必ずしも各段に設けられなくてもよい。
実施の形態の自動倉庫システム10の説明では、収容棚部30の段数と保管棚部20の段数とが一致している例について説明したがこれに限定されない。収容棚部30の段数と保管棚部20の段数とが一致していることは必須ではない。例えば、第1台車45を上下方向へ昇降させる昇降装置を設けることで、収容棚部30を保管棚部20の段数と異なる段数にて構成することができる。
実施の形態の自動倉庫システム10の説明では、第2台車46が車輪などの走行機構を備えて、自走可能に構成される例について説明したがこれに限定されない。例えば、棚側にベルトやチェーンなどによる搬送機構を備え、第2台車は、この搬送機構によって列方向に搬送されてもよい。この場合、第2台車は走行機構を備えても備えなくてもよい。
Claims (7)
- M(Mは2以上の整数)行、N(Nは2以上の整数)列の保管部を有する保管部配列を含み、当該各保管部は荷を保管可能に構成される保管棚部と、
M行の収容部を有する収容部配列を含み、当該各収容部は外部から荷を受け入れて収容可能に構成される収容棚部と、
前記保管棚部と前記収容棚部との間で荷を搬送する中間搬送装置と、
を備えることを特徴とする自動倉庫システム。 - 前記各収容部は、前記保管棚部に向いた側に設けられ、前記保管棚部に搬送する荷を通過させるための第1出入口部と、前記第1出入口部とは別に設けられ、外部から受け入れる荷を通過させるための第2出入口部と、を有することを特徴とする請求項1に記載の自動倉庫システム。
- 前記保管棚部は、K(Kは2以上の整数)段の前記保管部配列を含み、
前記収容棚部は、K段の前記収容部配列を含むことを特徴とする請求項1または2に記載の自動倉庫システム。 - 前記中間搬送装置は、
荷を行方向に搬送可能な行方向搬送装置と、
荷を列方向に搬送可能な列方向搬送装置と、
を含み、
前記列方向搬送装置は、荷を、搬送元から搬送して前記行方向搬送装置に積み入れるように構成され、
前記行方向搬送装置は、積み入れられた荷を、搬送先の行に向かって搬送するように構成されることを特徴とする請求項1から3のいずれかに記載の自動倉庫システム。 - 前記行方向搬送装置は、前記保管棚部と前記収容棚部との間にて行方向に伸びる第1軌条と、前記第1軌条を走行可能な第1台車と、を含み、
前記列方向搬送装置は、前記保管棚部にて列方向に伸びる第2軌条と、前記収容棚部にて列方向に伸びる第3軌条と、前記第2軌条および前記第3軌条を走行可能な第2台車と、を含むことを特徴とする請求項4に記載の自動倉庫システム。 - 前記第1台車は、前記第2台車を積載して前記第1軌条を走行可能に構成されることを特徴とする請求項5に記載の自動倉庫システム。
- 前記第1台車は、前記第2台車を積載可能なスタッカークレーンであることを特徴とする請求項5に記載の自動倉庫システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019169091A JP6987819B2 (ja) | 2017-03-03 | 2019-09-18 | 自動倉庫システム |
| JP2021195191A JP7203183B2 (ja) | 2017-03-03 | 2021-12-01 | 自動倉庫システム |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017040842A JP6621430B2 (ja) | 2017-03-03 | 2017-03-03 | 自動倉庫システム |
| JP2019169091A JP6987819B2 (ja) | 2017-03-03 | 2019-09-18 | 自動倉庫システム |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017040842A Division JP6621430B2 (ja) | 2017-03-03 | 2017-03-03 | 自動倉庫システム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021195191A Division JP7203183B2 (ja) | 2017-03-03 | 2021-12-01 | 自動倉庫システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019210152A true JP2019210152A (ja) | 2019-12-12 |
| JP2019210152A5 JP2019210152A5 (ja) | 2020-04-09 |
| JP6987819B2 JP6987819B2 (ja) | 2022-01-05 |
Family
ID=79239684
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019169091A Active JP6987819B2 (ja) | 2017-03-03 | 2019-09-18 | 自動倉庫システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6987819B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2594516A (en) * | 2020-05-01 | 2021-11-03 | Edwards Vacuum Llc | Transport device and method of moving vacuum system components in a confined space |
| JP7575234B2 (ja) | 2020-09-18 | 2024-10-29 | 住友重機械搬送システム株式会社 | 自動倉庫システム |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5043438A (en) * | 1973-08-21 | 1975-04-19 | Mitsubishi Heavy Industries Ltd. | Charging method of carriage |
| JPH01115608U (ja) * | 1988-01-27 | 1989-08-03 | ||
| JPH05301604A (ja) * | 1992-04-27 | 1993-11-16 | Matsushita Electric Ind Co Ltd | 自動倉庫 |
| JP2007217116A (ja) * | 2006-02-16 | 2007-08-30 | Dainippon Printing Co Ltd | 倉庫システム |
-
2019
- 2019-09-18 JP JP2019169091A patent/JP6987819B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5043438A (en) * | 1973-08-21 | 1975-04-19 | Mitsubishi Heavy Industries Ltd. | Charging method of carriage |
| JPH01115608U (ja) * | 1988-01-27 | 1989-08-03 | ||
| JPH05301604A (ja) * | 1992-04-27 | 1993-11-16 | Matsushita Electric Ind Co Ltd | 自動倉庫 |
| JP2007217116A (ja) * | 2006-02-16 | 2007-08-30 | Dainippon Printing Co Ltd | 倉庫システム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2594516A (en) * | 2020-05-01 | 2021-11-03 | Edwards Vacuum Llc | Transport device and method of moving vacuum system components in a confined space |
| JP7575234B2 (ja) | 2020-09-18 | 2024-10-29 | 住友重機械搬送システム株式会社 | 自動倉庫システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6987819B2 (ja) | 2022-01-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6509150B2 (ja) | 自動倉庫システム及びスタッカークレーン | |
| CN110891882A (zh) | 运送车以及运送设备 | |
| JPWO2019181241A1 (ja) | ストッカシステム | |
| KR20230026498A (ko) | 저장 장치의 운용 방법 | |
| JP6987819B2 (ja) | 自動倉庫システム | |
| JP7425408B2 (ja) | 物品収容設備 | |
| JP6621430B2 (ja) | 自動倉庫システム | |
| JP6639721B1 (ja) | 自動倉庫システム、自動倉庫システムの動作方法 | |
| JP6806856B2 (ja) | 自動倉庫システム | |
| JP2019077508A (ja) | 自動倉庫システム | |
| JP3521473B2 (ja) | ピッキング用移載装置付き自動倉庫 | |
| JP2019006517A (ja) | 荷物受け渡しシステム | |
| US20240034556A1 (en) | Article Storage Facility | |
| JP2016169083A (ja) | 昇降搬送装置 | |
| JP6514404B1 (ja) | 自動倉庫システム | |
| JP2018080028A (ja) | 自動倉庫 | |
| JP7203183B2 (ja) | 自動倉庫システム | |
| JP2023129565A (ja) | 自動倉庫システム | |
| JP7189192B2 (ja) | 自動倉庫システム | |
| WO2021215132A1 (ja) | 自動倉庫システム | |
| JP3446865B2 (ja) | 物品保管設備 | |
| JP2003237908A (ja) | スタッカークレーン | |
| JP6564541B2 (ja) | 自動倉庫システム | |
| JPH08133416A (ja) | 荷搬出装置 | |
| JP6563559B1 (ja) | 自動倉庫システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200228 |
|
| A625 | Written request for application examination (by other person) |
Free format text: JAPANESE INTERMEDIATE CODE: A625 Effective date: 20200302 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210316 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210510 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211102 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211201 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6987819 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |