JP6514404B1 - 自動倉庫システム - Google Patents
自動倉庫システム Download PDFInfo
- Publication number
- JP6514404B1 JP6514404B1 JP2018208825A JP2018208825A JP6514404B1 JP 6514404 B1 JP6514404 B1 JP 6514404B1 JP 2018208825 A JP2018208825 A JP 2018208825A JP 2018208825 A JP2018208825 A JP 2018208825A JP 6514404 B1 JP6514404 B1 JP 6514404B1
- Authority
- JP
- Japan
- Prior art keywords
- cross beam
- rail
- carriage
- distance
- load
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Landscapes
- Warehouses Or Storage Devices (AREA)
Abstract
Description
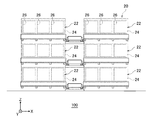
また逆に、本実施の形態によれば、荷12に対する外部出入口部24aの高さ方向の余裕を比較例と同程度にすれば、つまり距離d1を比較例における距離d1と同程度にすれば、各段の載置台30の高さ方向の間隔を比較例よりも狭くでき、建物の天井の高さ等に基づく保管棚20の段数の上限を比較例の場合よりも増やすことが可能となる。保管棚20の段数が増えれば、(保管行24の数)×(各保管行24に含まれる保管部26の数)もの数の保管部26が一気に増え、保管棚20の収容効率が大幅に向上する。
一方、比較例では、荷12に対する外部出入口部24aの高さ方向の余裕を大きくするには、各横梁38の高さ位置を上げる必要があり、そうすると、各段の載置台30の高さ方向の間隔が広くなり、収容効率が低下する。
一方、比較例では、第1台車14が外部出入口部24aから落ちるおそれがある。比較例において第1台車14が外部出入口部24aから落ちるのを抑制するには、別途、抑制部材を用意する必要がある。
Claims (6)
- 荷を搬送するための台車と、
高さ方向に複数段設けられた棚部と、
複数段の前記棚部それぞれに設けられ、前記台車を第1方向へ移動させるための、水平に延びるレールと、
一の棚部の段において、前記第1方向に沿って複数並べて設けられ、前記レールを支持する支持部材と、を備え、
前記第1方向における最も端部側の支持部材は、他の支持部材よりも前記高さ方向における位置が高くなるように設けられていることを特徴とする自動倉庫システム。 - 前記最も端部側の支持部材は、前記端部側からの前記台車の転落を抑制する抑制部材として機能することを特徴とする請求項1に記載の自動倉庫システム。
- 前記最も端部側の支持部材の少なくとも一部は、前記レールの走行面よりも上側に位置することを特徴とする請求項1または2に記載の自動倉庫システム。
- 前記最も端部側の支持部材と、前記他の支持部材のうちの前記最も端部側の支持部材に隣接する支持部材との前記第1方向における間隔は、前記他の支持部材同士の間隔よりも広いことを特徴とする請求項1から3のいずれかに記載の自動倉庫システム。
- 荷はパレットに載せられた状態で搬送され、
前記レールの端部から、前記他の支持部材のうちの前記最も端部側の支持部材までの距離は、前記パレットの前記第1方向における長さよりも長いことを特徴とする請求項1から4のいずれかに記載の自動倉庫システム。 - 荷を搬送するための台車と、
高さ方向に複数段設けられた棚部と、
複数段の前記棚部それぞれに設けられる、前記台車を第1方向へ移動させるためのレールと、
複数段の前記棚部それぞれに設けられる、レールを支持する複数の支持部材と、を備え、
一の棚部の載置面から、当該棚部の上側に隣接する棚部を支持する複数の支持部材のうちの最も端部側の支持部材までの高さ方向の距離は、前記載置面から、前記隣接する棚部を支持する複数の支持部材のうちの他の支持部材までの高さ方向の距離よりも長いことを特徴とする自動倉庫システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018016491 | 2018-02-01 | ||
| JP2018016491 | 2018-02-01 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019075749A Division JP2019131405A (ja) | 2018-02-01 | 2019-04-11 | 自動倉庫システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6514404B1 true JP6514404B1 (ja) | 2019-05-15 |
| JP2019131399A JP2019131399A (ja) | 2019-08-08 |
Family
ID=66530874
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018208825A Active JP6514404B1 (ja) | 2018-02-01 | 2018-11-06 | 自動倉庫システム |
| JP2019075749A Pending JP2019131405A (ja) | 2018-02-01 | 2019-04-11 | 自動倉庫システム |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019075749A Pending JP2019131405A (ja) | 2018-02-01 | 2019-04-11 | 自動倉庫システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (2) | JP6514404B1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115108210A (zh) * | 2021-03-22 | 2022-09-27 | 浙江衣拿智能科技股份有限公司 | 进仓装置、入库设备以及带式仓储系统 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7437888B2 (ja) | 2019-07-16 | 2024-02-26 | キヤノン株式会社 | 情報処理装置、その制御方法、プログラム、及びシステム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ATE54899T1 (de) * | 1987-11-30 | 1990-08-15 | Magcon Beheer B V | Lagersystem fuer paletten. |
| JPH0626966B2 (ja) * | 1990-01-11 | 1994-04-13 | 日本ファイリング株式会社 | 流動棚 |
| JP5673956B2 (ja) * | 2011-10-17 | 2015-02-18 | 株式会社ダイフク | 可動荷台付き棚 |
| JP6482183B2 (ja) * | 2014-05-07 | 2019-03-13 | 株式会社オカムラ | 走行レール |
-
2018
- 2018-11-06 JP JP2018208825A patent/JP6514404B1/ja active Active
-
2019
- 2019-04-11 JP JP2019075749A patent/JP2019131405A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115108210A (zh) * | 2021-03-22 | 2022-09-27 | 浙江衣拿智能科技股份有限公司 | 进仓装置、入库设备以及带式仓储系统 |
| CN115108210B (zh) * | 2021-03-22 | 2023-06-06 | 浙江衣拿智能科技股份有限公司 | 进仓装置、入库设备以及带式仓储系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019131405A (ja) | 2019-08-08 |
| JP2019131399A (ja) | 2019-08-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2008038393A1 (fr) | Entrepôt automatisé | |
| JPWO2019008999A1 (ja) | 自動倉庫システム | |
| JP6514404B1 (ja) | 自動倉庫システム | |
| JP2019077508A (ja) | 自動倉庫システム | |
| JP7425408B2 (ja) | 物品収容設備 | |
| JP2897619B2 (ja) | 自動倉庫 | |
| JP2023129565A (ja) | 自動倉庫システム | |
| JP6870370B2 (ja) | スタッカクレーン、および、自動倉庫 | |
| JP6621430B2 (ja) | 自動倉庫システム | |
| JP6563559B1 (ja) | 自動倉庫システム | |
| JP6987819B2 (ja) | 自動倉庫システム | |
| JP7135243B2 (ja) | 立体自動倉庫 | |
| JP7075768B2 (ja) | 自動倉庫システム | |
| JP4414193B2 (ja) | 自動倉庫における入出庫管理方法 | |
| JP7075766B2 (ja) | 自動倉庫システム | |
| JP6639721B1 (ja) | 自動倉庫システム、自動倉庫システムの動作方法 | |
| JP7125375B2 (ja) | 自動倉庫システム | |
| JP6676702B2 (ja) | 自動倉庫システム | |
| JP7189117B2 (ja) | 自動倉庫システム | |
| JP2003237908A (ja) | スタッカークレーン | |
| JP6638253B2 (ja) | 自動倉庫 | |
| JP7203183B2 (ja) | 自動倉庫システム | |
| JP2000327112A (ja) | 自動倉庫設備 | |
| WO2021215132A1 (ja) | 自動倉庫システム | |
| JP2020090397A (ja) | 自動倉庫システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181106 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20181106 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20181221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190308 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190326 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190411 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6514404 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |