JP2019190835A - 車両遠隔操作支援システム - Google Patents
車両遠隔操作支援システム Download PDFInfo
- Publication number
- JP2019190835A JP2019190835A JP2018079745A JP2018079745A JP2019190835A JP 2019190835 A JP2019190835 A JP 2019190835A JP 2018079745 A JP2018079745 A JP 2018079745A JP 2018079745 A JP2018079745 A JP 2018079745A JP 2019190835 A JP2019190835 A JP 2019190835A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- route
- operator
- unit
- support system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000005540 biological transmission Effects 0.000 claims description 15
- 238000001514 detection method Methods 0.000 claims description 11
- 208000032140 Sleepiness Diseases 0.000 claims description 9
- 206010041349 Somnolence Diseases 0.000 claims description 9
- 230000037321 sleepiness Effects 0.000 claims description 9
- 235000019441 ethanol Nutrition 0.000 claims 1
- 238000004891 communication Methods 0.000 description 18
- 238000000034 method Methods 0.000 description 9
- 230000002093 peripheral effect Effects 0.000 description 4
- LFQSCWFLJHTTHZ-UHFFFAOYSA-N Ethanol Chemical compound CCO LFQSCWFLJHTTHZ-UHFFFAOYSA-N 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 230000036760 body temperature Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000035622 drinking Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000029058 respiratory gaseous exchange Effects 0.000 description 1
Images





Abstract
Description
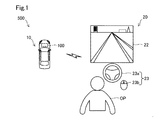
図1に示すように、車両遠隔操作支援システム500は、車両10と管制センタ20を備える。本実施形態の車両10は、自動運転モードと手動運転モードと遠隔操縦モードの3つのモードで走行可能である。車両10は自動運転システム100を搭載する。手動運転モードでは、車両10搭乗者によって操縦される。遠隔操縦モードでは、車両10は遠隔操縦元である管制センタ20によって遠隔操縦される。車両10は3つのモードのいずれで走行しているかにかかわらず、車両10の周辺の画像を管制センタ20に送信する、管制センタ20は、車両10より受信した画像を画像表示部22に表示し、オペレータOPが遠隔操縦部23で車両10を遠隔操縦することが可能である。遠隔操縦部23は、例えば、ハンドル23aとマウス23bとを含む。
<経路1>車両10が走行不可能である経路
<経路2>搭乗者が運転出来ない場合に搭乗者が運転する必要がある経路
<経路3>遠隔操縦困難期間に遠隔操縦する必要がある経路
自動運転モード:1
遠隔操縦モード:1.5
手動運転モード:3
遠隔操縦モードにおける運転コストに対する重み付け係数は、自動運転モードにおける運転コストに対する重み付け係数よりも大きく、手動運転モードにおける運転コストに対する重み付け係数は、遠隔操縦モードにおける運転コストに対する重み付け係数よりも大きい。
候補経路L1の運転コスト= 30 + 1.5 × 20 + 15
= 75
候補経路L2の運転コスト=2 + 3 × 25 + 23
= 100
候補経路L3の運転コスト= 90
上記実施形態において、経路選択部25は、通信部24を介して受信した搭乗者情報送信部116と車両仕様送信部118とを記憶部26に記憶し、搭乗者の運転履歴から、搭乗者の運転できる車両区分を定めてもよい。例えば、運転履歴より、オートマチックトランスミッション(Automatic Transmission(AT))車のみ運転している搭乗者は、マニュアルトランスミッション(Manual Transmission(MT))車は運転できないと定める。また、搭乗者情報送信部116は、自車位置センサ126と道路情報記憶部130と搭乗者検知部140との検出信号を用いて、搭乗者毎の運転履歴を経路選択部25に送信してもよい。経路選択部25は、これらの運転履歴を記憶部26に記憶し、例えば、自動運転が困難な区間において搭乗者が運転できるか否かを判定してもよい。
オペレータ稼働率 0〜30%:1.5
オペレータ稼働率31〜50% :1.7
オペレータ稼働率51〜75% :1.9
眠気の度合い 0〜25% :3
眠気の度合い26〜50% :3.2
眠気の度合い51〜75% :3.5
Claims (5)
- 車両遠隔操作支援システム(500)であって、
自動運転を実行する自動運転システム(100)を有する車両(10)と、
オペレータ(OP)を有する管制センタ(20)と、を備え、
前記車両は、前記自動運転が困難な場合に前記オペレータを呼び出す呼び出し部(110)を備え、
前記管制センタは、
前記オペレータが前記車両を遠隔操縦する遠隔操縦部(23)と、
前記車両から呼び出された時に前記オペレータを割り当てる割り当て制御部(21)と、
前記車両が指定した目的地に対し、予め定められた演算式に従って算出された運転コストが最小となる経路を選択する経路選択部(25)と、を備え、
前記経路選択部は、前記オペレータが前記車両を遠隔操縦する区間に対して、当該区間を前記自動運転で走行する場合よりも大きな重みを付して前記運転コストを算出する、車両遠隔操作支援システム。 - 請求項1に記載の車両遠隔操作支援システムであって、
前記経路選択部は、前記車両の搭乗者が手動運転を実行する区間に対して、当該区間を前記オペレータが前記車両を遠隔操縦する場合よりも大きな重みを付して前記運転コストを算出する、車両遠隔操作支援システム。 - 請求項2に記載の車両遠隔操作支援システムであって、
前記経路選択部は、前記搭乗者が運転免許を有さない場合および前記搭乗者が飲酒をしている場合のうち少なくとも一方において、前記搭乗者の運転が必要となる経路を選択しない、車両遠隔操作支援システム。 - 請求項2または請求項3に記載の車両遠隔操作支援システムであって、更に、
前記車両は、前記搭乗者の眠気の度合いを検知する搭乗者検知部(140)と、前記眠気の度合いを前記管制センタに送信する搭乗者情報送信部(116)とを備え、
前記経路選択部は、前記車両の搭乗者が手動運転を実行する区間に対して、当該区間を前記搭乗者情報送信部より取得した前記眠気の度合いが大きい場合に小さい場合よりも大きな重みを付して前記運転コストを算出する、車両遠隔操作支援システム。 - 請求項1から4のうちいずれか一項に記載の車両遠隔操作支援システムであって、更に、
前記車両は、当該車両の仕様を前記管制センタに送信する車両仕様送信部(118)を備え、
前記経路選択部は、前記車両仕様送信部より取得した前記車両の仕様を用いて前記車両が走行可能か判定し、前記車両が走行不可能な経路を選択しない、車両遠隔操作支援システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018079745A JP2019190835A (ja) | 2018-04-18 | 2018-04-18 | 車両遠隔操作支援システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018079745A JP2019190835A (ja) | 2018-04-18 | 2018-04-18 | 車両遠隔操作支援システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019190835A true JP2019190835A (ja) | 2019-10-31 |
Family
ID=68389781
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018079745A Pending JP2019190835A (ja) | 2018-04-18 | 2018-04-18 | 車両遠隔操作支援システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019190835A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021131474A1 (ja) * | 2019-12-26 | 2021-07-01 | ソニーセミコンダクタソリューションズ株式会社 | 情報処理装置、移動装置、情報処理システム、および方法、並びにプログラム |
| WO2021153382A1 (ja) * | 2020-01-28 | 2021-08-05 | パナソニックIpマネジメント株式会社 | 情報処理方法、及び、情報処理システム |
| CN115410374A (zh) * | 2022-11-01 | 2022-11-29 | 中国第一汽车股份有限公司 | 一种远程控制自动驾驶车辆管理系统及管理方法 |
| JP7456889B2 (ja) | 2020-08-25 | 2024-03-27 | 株式会社トヨタマップマスター | 情報処理装置、情報処理方法及び情報処理プログラム |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006301963A (ja) * | 2005-04-20 | 2006-11-02 | Toyota Motor Corp | 遠隔操作システム |
| JP2016179810A (ja) * | 2015-03-23 | 2016-10-13 | 株式会社デンソー | 自動走行制御装置及び自動走行制御システム |
| JP2016181031A (ja) * | 2015-03-23 | 2016-10-13 | 株式会社デンソー | 自動走行制御装置、又は、自動走行制御システム |
| WO2017077621A1 (ja) * | 2015-11-05 | 2017-05-11 | 株式会社日立製作所 | 移動体移動システム及び移動経路選択方法 |
-
2018
- 2018-04-18 JP JP2018079745A patent/JP2019190835A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006301963A (ja) * | 2005-04-20 | 2006-11-02 | Toyota Motor Corp | 遠隔操作システム |
| JP2016179810A (ja) * | 2015-03-23 | 2016-10-13 | 株式会社デンソー | 自動走行制御装置及び自動走行制御システム |
| JP2016181031A (ja) * | 2015-03-23 | 2016-10-13 | 株式会社デンソー | 自動走行制御装置、又は、自動走行制御システム |
| WO2017077621A1 (ja) * | 2015-11-05 | 2017-05-11 | 株式会社日立製作所 | 移動体移動システム及び移動経路選択方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021131474A1 (ja) * | 2019-12-26 | 2021-07-01 | ソニーセミコンダクタソリューションズ株式会社 | 情報処理装置、移動装置、情報処理システム、および方法、並びにプログラム |
| CN114930422A (zh) * | 2019-12-26 | 2022-08-19 | 索尼半导体解决方案公司 | 信息处理设备、移动装置、信息处理系统、信息处理方法和程序 |
| WO2021153382A1 (ja) * | 2020-01-28 | 2021-08-05 | パナソニックIpマネジメント株式会社 | 情報処理方法、及び、情報処理システム |
| JP7456889B2 (ja) | 2020-08-25 | 2024-03-27 | 株式会社トヨタマップマスター | 情報処理装置、情報処理方法及び情報処理プログラム |
| CN115410374A (zh) * | 2022-11-01 | 2022-11-29 | 中国第一汽车股份有限公司 | 一种远程控制自动驾驶车辆管理系统及管理方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108140314B (zh) | 停车辅助方法及停车辅助装置 | |
| US20200307648A1 (en) | Parking lot management device, parking lot management method, and storage medium | |
| US20230015466A1 (en) | Vehicle control system, and vehicle control method | |
| JP2019190835A (ja) | 車両遠隔操作支援システム | |
| CN109388137B (zh) | 驾驶辅助设备和存储介质 | |
| WO2018159429A1 (ja) | 運転支援方法およびそれを利用した運転支援装置、運転支援システム | |
| JP7096183B2 (ja) | 車両制御システム、車両制御方法、およびプログラム | |
| CN111511610B (zh) | 停车控制方法及停车控制装置 | |
| CN110050301A (zh) | 车辆控制装置 | |
| US20200310431A1 (en) | Control apparatus, control method and storage medium | |
| JP7163729B2 (ja) | 車両制御装置 | |
| CN109720343B (zh) | 车辆控制设备 | |
| JP2015072570A (ja) | 車両の制御装置 | |
| CN112602107B (zh) | 用于车辆调度系统的信息提供方法、车辆调度系统以及信息提供装置 | |
| CN111527010A (zh) | 驻车控制方法以及驻车控制装置 | |
| JP2018147111A (ja) | 運転支援方法およびそれを利用した運転支援装置、自動運転制御装置、車両、プログラム、運転支援システム | |
| JP2018144568A (ja) | 運転支援方法およびそれを利用した運転支援装置、自動運転制御装置、車両、プログラム、運転支援システム | |
| JP2018144570A (ja) | 運転支援方法およびそれを利用した運転支援装置、自動運転制御装置、車両、プログラム、運転支援システム | |
| JP7068016B2 (ja) | 車両遠隔操作支援システム | |
| JP2018088043A (ja) | 走行制御装置 | |
| JP7448624B2 (ja) | 運転支援装置、運転支援方法、およびプログラム | |
| US20210304519A1 (en) | Accommodation area management device | |
| CN115454036A (zh) | 远程操作委托系统、远程操作委托方法以及存储介质 | |
| JP2018144569A (ja) | 運転支援方法およびそれを利用した運転支援装置、自動運転制御装置、車両、プログラム、運転支援システム | |
| JP2022103645A (ja) | 車両制御装置、車両制御方法、およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210119 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220201 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220628 |