JP2018159352A - 可動装置 - Google Patents
可動装置 Download PDFInfo
- Publication number
- JP2018159352A JP2018159352A JP2017057944A JP2017057944A JP2018159352A JP 2018159352 A JP2018159352 A JP 2018159352A JP 2017057944 A JP2017057944 A JP 2017057944A JP 2017057944 A JP2017057944 A JP 2017057944A JP 2018159352 A JP2018159352 A JP 2018159352A
- Authority
- JP
- Japan
- Prior art keywords
- actuator element
- actuator
- energy
- driven body
- heating wire
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000000463 material Substances 0.000 claims abstract description 54
- 230000005540 biological transmission Effects 0.000 claims abstract description 31
- 230000003247 decreasing effect Effects 0.000 claims description 30
- 230000007423 decrease Effects 0.000 claims description 15
- 229920002994 synthetic fiber Polymers 0.000 claims description 6
- 239000012209 synthetic fiber Substances 0.000 claims description 6
- 230000007246 mechanism Effects 0.000 abstract description 95
- 238000010438 heat treatment Methods 0.000 abstract description 78
- 230000033001 locomotion Effects 0.000 abstract description 27
- 238000000034 method Methods 0.000 description 17
- 230000008878 coupling Effects 0.000 description 14
- 238000010168 coupling process Methods 0.000 description 14
- 238000005859 coupling reaction Methods 0.000 description 14
- 229910052751 metal Inorganic materials 0.000 description 13
- 239000002184 metal Substances 0.000 description 13
- 230000008569 process Effects 0.000 description 12
- 239000010408 film Substances 0.000 description 11
- 239000010409 thin film Substances 0.000 description 9
- 238000012546 transfer Methods 0.000 description 9
- 229920005594 polymer fiber Polymers 0.000 description 8
- 229920001940 conductive polymer Polymers 0.000 description 7
- 239000000835 fiber Substances 0.000 description 6
- 230000017525 heat dissipation Effects 0.000 description 6
- 230000006399 behavior Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 229920005989 resin Polymers 0.000 description 5
- 239000011347 resin Substances 0.000 description 5
- 229910001285 shape-memory alloy Inorganic materials 0.000 description 5
- 238000003860 storage Methods 0.000 description 5
- 238000001514 detection method Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 229910001120 nichrome Inorganic materials 0.000 description 4
- 230000004913 activation Effects 0.000 description 3
- 238000001816 cooling Methods 0.000 description 3
- 238000004804 winding Methods 0.000 description 3
- 230000005679 Peltier effect Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 230000009849 deactivation Effects 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 239000002783 friction material Substances 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 230000002779 inactivation Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 238000007747 plating Methods 0.000 description 2
- 229920000642 polymer Polymers 0.000 description 2
- 230000005855 radiation Effects 0.000 description 2
- 238000004544 sputter deposition Methods 0.000 description 2
- 238000003786 synthesis reaction Methods 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 239000004677 Nylon Substances 0.000 description 1
- 239000004698 Polyethylene Substances 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 238000005485 electric heating Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 239000011888 foil Substances 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- 229920001778 nylon Polymers 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000011368 organic material Substances 0.000 description 1
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 1
- 229920006122 polyamide resin Polymers 0.000 description 1
- -1 polyethylene Polymers 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
- 229920013716 polyethylene resin Polymers 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
Images










Landscapes
- Micromachines (AREA)
- Transmission Devices (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Abstract
Description
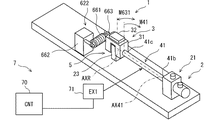
図1において、可動装置1は、固定の基台2と、基台2に対して機械的に動くことができる可動部3とを有する。可動部3は、高さ方向HDに沿って延びる回動軸AXRの周りを回転移動することができる。可動部3は、回動軸AXRの周りの所定の角度範囲RGを往復移動する。可動部3は、被駆動体31を有する。可動部3の動きは、揺動とも呼ばれる。なお、可動部3の移動方向は、回動に限られない。可動部3の移動方向は、例えば、高さ方向HDに沿う平行移動、幅方向WDに沿う平行移動、奥行き方向DDの周りにおける回転移動など多様な動きに適合可能である。
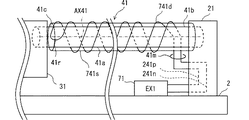
この実施形態は、先行する実施形態を基礎的形態とする変形例である。上記実施形態では、正電極41pと負電極41nとの両方が、接続部41mにおいて、エネルギ増減装置71に直接に接続されている。これに代えて、この実施形態では、正電極241pと負電極241nとの両方が、固定部21によって支持されている。
この実施形態は、先行する実施形態を基礎的形態とする変形例である。上記実施形態では、発熱部材は、ニクロム線によって提供されている。これに代えて、発熱部材は、多様な電気的な発熱部材によって提供できる。この実施形態では、発熱部材は、導電性薄膜341dによって形成されている。
この実施形態は、先行する実施形態を基礎的形態とする変形例である。上記実施形態では、螺旋状の発熱線41dが採用されている。これに代えて、この実施形態では、直線状の発熱線441dが用いられている。
この実施形態は、先行する実施形態を基礎的形態とする変形例である。直線状の形状は、導電性薄膜541dでも採用することができる。
この実施形態は、先行する実施形態を基礎的形態とする変形例である。上記実施形態では、2つのアクチュエータ素子41、42が利用されている。これに代えて、ひとつのアクチュエータ素子41だけを備えてもよい。この場合、第2のアクチュエータ素子42に代えて、受動的な回動機構を用いることができる。受動的な回動機構は、ゴム、樹脂製バネ、金属製バネ、空気バネなど多様な機構により提供することができる。受動的な回動機構は、戻し機構と呼ばれる。
この実施形態は、先行する実施形態を基礎的形態とする変形例である。上記実施形態では、エネルギ伝達部品は、素材線41aに直接的に接触し、素材線41aに直接的にエネルギを伝達する。これに代えて、この実施形態では、エネルギ伝達部品は、素材線41aに間接的にエネルギを伝達する。
この実施形態は、先行する実施形態を基礎的形態とする変形例である。この実施形態では、直線状の発熱線841dが用いられている。
この明細書における開示は、例示された実施形態に制限されない。開示は、例示された実施形態と、それらに基づく当業者による変形態様を包含する。例えば、開示は、実施形態において示された部品および/または要素の組み合わせに限定されない。開示は、多様な組み合わせによって実施可能である。開示は、実施形態に追加可能な追加的な部分をもつことができる。開示は、実施形態の部品および/または要素が省略されたものを包含する。開示は、ひとつの実施形態と他の実施形態との間における部品および/または要素の置き換え、または組み合わせを包含する。開示される技術的範囲は、実施形態の記載に限定されない。開示されるいくつかの技術的範囲は、請求の範囲の記載によって示され、さらに請求の範囲の記載と均等の意味及び範囲内での全ての変更を含むものと解されるべきである。
21 固定部、 22 固定部、 23 支持部、
3 可動部、 31 被駆動体、
4 アクチュエータ機構、
41 アクチュエータ素子、 42 アクチュエータ素子、
41a 素材線、 41b 固定端、 41c 出力端、
41d 発熱線、 41m 接続部、 41r 戻り部、
41p 正電極、 41n 負電極、
5 案内機構、 51 シャフト、 52 ガイドボア、
7 制御システム、 70 制御装置、
71、72 エネルギ増減装置、
241p 正電極、 241n 負電極、
341d 導電性薄膜、 441d 発熱線、
541d 導電性薄膜、 622 戻し機構、
741d 発熱線、 741s ボビン、
841d 発熱線、
AX41 アクチュエータ軸、 AXR 回動軸。
Claims (10)
- エネルギの増減によって変形を生じるアクチュエータ素子(41、42)と、
前記アクチュエータ素子と連結された被駆動体(31)とを備え、
前記アクチュエータ素子は、
前記変形を生じる素材線(41a)と、
前記素材線のエネルギを増減させるエネルギ伝達部品であって、前記アクチュエータ素子のアクチュエータ軸に沿って往復状に配置されたエネルギ伝達部品(41d、341d、441d、541d、741d、841d)とを備える可動装置。 - 前記エネルギ伝達部品の両方の端部(41p、41n;241p、241n)が、前記アクチュエータ素子の端部に設けられた接続部(41m)に集められている請求項1に記載の可動装置。
- 前記アクチュエータ素子は、前記アクチュエータ軸の一端であって、固定されている固定端(41b)と、前記被駆動体に連結されており、前記変形を出力するための出力端(41c)とを有しており、
前記接続部は、中央よりも前記固定端の側に配置されている請求項2に記載の可動装置。 - 前記接続部は、前記中央より前記固定端の近くに配置されている請求項3に記載の可動装置。
- 前記エネルギ伝達部品は、前記中央よりも前記出力端の側に、前記エネルギ伝達部品を往復させるための戻り部(41r)を有する請求項3または請求項4に記載の可動装置。
- 前記素材線と前記エネルギ伝達部品との間に配置されるボビン(741s)を備える請求項1から請求項5のいずれかに記載の可動装置。
- 前記アクチュエータ素子は、熱エネルギの増減によって前記変形を生じる請求項1から請求項6のいずれかに記載の可動装置。
- 前記エネルギ伝達部品は、発熱部材である請求項7に記載の可動装置。
- 前記アクチュエータ素子は、合成繊維である請求項1から請求項8のいずれかに記載の可動装置。
- さらに、前記アクチュエータ素子のエネルギを増減させるエネルギ増減装置(71、72)と、
前記アクチュエータ素子のエネルギが増加する期間と、前記アクチュエータ素子のエネルギが減少する期間とを交互に繰り返すように前記エネルギ増減装置を制御する制御装置(70)とを備える請求項1から請求項9のいずれかに記載の可動装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017057944A JP6794892B2 (ja) | 2017-03-23 | 2017-03-23 | 可動装置 |
| PCT/JP2018/008675 WO2018173745A1 (ja) | 2017-03-23 | 2018-03-07 | 可動装置 |
| CN201880019581.XA CN110462209B (zh) | 2017-03-23 | 2018-03-07 | 可动装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017057944A JP6794892B2 (ja) | 2017-03-23 | 2017-03-23 | 可動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018159352A true JP2018159352A (ja) | 2018-10-11 |
| JP2018159352A5 JP2018159352A5 (ja) | 2019-05-30 |
| JP6794892B2 JP6794892B2 (ja) | 2020-12-02 |
Family
ID=63585989
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017057944A Active JP6794892B2 (ja) | 2017-03-23 | 2017-03-23 | 可動装置 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6794892B2 (ja) |
| CN (1) | CN110462209B (ja) |
| WO (1) | WO2018173745A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021514444A (ja) * | 2018-02-20 | 2021-06-10 | リンテック・オブ・アメリカ・インコーポレイテッド | ねじられていない人工筋肉 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6841115B2 (ja) | 2017-03-23 | 2021-03-10 | 株式会社デンソー | 可動装置 |
| DE102019100694B4 (de) * | 2019-01-11 | 2021-05-20 | Chr. Mayr Gmbh + Co. Kg | Formgedächtnisaktuatoranordnung und Montageverfahren |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH077975A (ja) * | 1992-06-12 | 1995-01-10 | Sarcos Group | 移動作動器および移動検知器 |
| JPH09312984A (ja) * | 1996-05-21 | 1997-12-02 | Casio Comput Co Ltd | 機能性高分子素子およびその製造方法 |
| US6065934A (en) * | 1997-02-28 | 2000-05-23 | The Boeing Company | Shape memory rotary actuator |
| JP2003111458A (ja) * | 2001-10-01 | 2003-04-11 | Minolta Co Ltd | 形状記憶合金を用いた駆動装置及び駆動制御方法 |
| JP2011117452A (ja) * | 2009-12-04 | 2011-06-16 | Ge Aviation Systems Ltd | 作動装置 |
| JP2015533521A (ja) * | 2012-08-01 | 2015-11-26 | ザ ボード オブ リージェンツ,ザユニバーシティ オブ テキサス システム | コイル状および非コイル状ナノファイバー撚糸およびポリマーファイバーのねじりおよび引張アクチュエータ |
| WO2017022146A1 (ja) * | 2015-08-04 | 2017-02-09 | パナソニックIpマネジメント株式会社 | アクチュエータ |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016064220A1 (ko) * | 2014-10-22 | 2016-04-28 | 한양대학교 산학협력단 | 온도 변화 또는 온도 구배에 의해 구동되는 회전형 구동기 및 이들을 이용한 에너지 하베스팅 장치 |
| JP2018019500A (ja) * | 2016-07-27 | 2018-02-01 | 株式会社デンソー | アクチュエータ及びセンサ装置 |
| JP6665723B2 (ja) * | 2016-07-27 | 2020-03-13 | 株式会社デンソー | アクチュエータ、センサ装置、及び、制御装置 |
-
2017
- 2017-03-23 JP JP2017057944A patent/JP6794892B2/ja active Active
-
2018
- 2018-03-07 CN CN201880019581.XA patent/CN110462209B/zh active Active
- 2018-03-07 WO PCT/JP2018/008675 patent/WO2018173745A1/ja active Application Filing
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH077975A (ja) * | 1992-06-12 | 1995-01-10 | Sarcos Group | 移動作動器および移動検知器 |
| JPH09312984A (ja) * | 1996-05-21 | 1997-12-02 | Casio Comput Co Ltd | 機能性高分子素子およびその製造方法 |
| US6065934A (en) * | 1997-02-28 | 2000-05-23 | The Boeing Company | Shape memory rotary actuator |
| JP2003111458A (ja) * | 2001-10-01 | 2003-04-11 | Minolta Co Ltd | 形状記憶合金を用いた駆動装置及び駆動制御方法 |
| JP2011117452A (ja) * | 2009-12-04 | 2011-06-16 | Ge Aviation Systems Ltd | 作動装置 |
| JP2015533521A (ja) * | 2012-08-01 | 2015-11-26 | ザ ボード オブ リージェンツ,ザユニバーシティ オブ テキサス システム | コイル状および非コイル状ナノファイバー撚糸およびポリマーファイバーのねじりおよび引張アクチュエータ |
| WO2017022146A1 (ja) * | 2015-08-04 | 2017-02-09 | パナソニックIpマネジメント株式会社 | アクチュエータ |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021514444A (ja) * | 2018-02-20 | 2021-06-10 | リンテック・オブ・アメリカ・インコーポレイテッド | ねじられていない人工筋肉 |
| US11221001B2 (en) | 2018-02-20 | 2022-01-11 | Lintec Of America, Inc. | Untwisted artificial muscle |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2018173745A1 (ja) | 2018-09-27 |
| CN110462209B (zh) | 2021-04-09 |
| JP6794892B2 (ja) | 2020-12-02 |
| CN110462209A (zh) | 2019-11-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2018173745A1 (ja) | 可動装置 | |
| US11002256B2 (en) | Movable device | |
| WO2018173746A1 (ja) | 可動装置 | |
| WO2018047505A1 (ja) | アクチュエータ装置 | |
| US10432074B2 (en) | Vibrator unit and vibration generator | |
| US20110199696A1 (en) | Piezoelectric actuator assembly and optical system including the same | |
| US11025178B2 (en) | Actuator device | |
| WO2017085880A1 (ja) | 硬度可変アクチュエータ | |
| WO2018173744A1 (ja) | 可動装置 | |
| WO2018173743A1 (ja) | 可動装置、その製造方法、および、その制御方法 | |
| JP4298443B2 (ja) | 駆動装置 | |
| US20190313885A1 (en) | Variable stiffness apparatus | |
| WO2019003569A1 (ja) | 駆動ユニットおよびロボット | |
| JP6387686B2 (ja) | 圧電アクチュエーター | |
| US9510480B2 (en) | Electronic device | |
| WO2019159754A1 (ja) | アクチュエータ装置 | |
| TWI303009B (ja) | ||
| WO2019082420A1 (ja) | 可動装置 | |
| JP2019146466A (ja) | アクチュエータ装置 | |
| WO2022152375A1 (en) | Shape memory alloy actuator architecture for driving adjustable aperture | |
| JP5001774B2 (ja) | 監視装置 | |
| KR20220169988A (ko) | 카메라 렌즈 이동 장치 | |
| JP2020072573A (ja) | アクチュエータ装置 | |
| CN115225791A (zh) | 马达、摄像模组和电子设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190416 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190416 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200331 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200518 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201013 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201026 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6794892 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |