JP6841115B2 - 可動装置 - Google Patents
可動装置 Download PDFInfo
- Publication number
- JP6841115B2 JP6841115B2 JP2017057941A JP2017057941A JP6841115B2 JP 6841115 B2 JP6841115 B2 JP 6841115B2 JP 2017057941 A JP2017057941 A JP 2017057941A JP 2017057941 A JP2017057941 A JP 2017057941A JP 6841115 B2 JP6841115 B2 JP 6841115B2
- Authority
- JP
- Japan
- Prior art keywords
- actuator
- shaft
- actuator element
- driven body
- energy
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03G—SPRING, WEIGHT, INERTIA OR LIKE MOTORS; MECHANICAL-POWER PRODUCING DEVICES OR MECHANISMS, NOT OTHERWISE PROVIDED FOR OR USING ENERGY SOURCES NOT OTHERWISE PROVIDED FOR
- F03G7/00—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for
- F03G7/06—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for using expansion or contraction of bodies due to heating, cooling, moistening, drying or the like
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N11/00—Generators or motors not provided for elsewhere; Alleged perpetua mobilia obtained by electric or magnetic means
Description
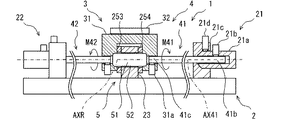
図1において、可動装置1は、固定の基台2と、基台2に対して機械的に動くことができる可動部3とを有する。可動部3は、高さ方向HDに沿って延びる回動軸AXRの周りを回転移動することができる。可動部3は、回動軸AXRの周りの所定の角度範囲RGを往復移動する。可動部3は、被駆動体31を有する。可動部3の動きは、揺動とも呼ばれる。なお、可動部3の移動方向は、回動に限られない。可動部3の移動方向は、例えば、高さ方向HDに沿う平行移動、幅方向WDに沿う平行移動、奥行き方向DDの周りにおける回転移動など多様な動きに適合可能である。
この実施形態は、先行する実施形態を基礎的形態とする変形例である。上記実施形態では、支持部23と被駆動体31とが直接的に接触可能である。これに代えて、この実施形態では、支持部23と被駆動体31との間に、摺動部材253、254が設けられている。
この実施形態は、先行する実施形態を基礎的形態とする変形例である。上記実施形態では、シャフト51とガイドボア52とが直接的に接触可能である。しかも、ガイドボア52は支持部23によって提供されている。これに代えて、この実施形態では、ガイドボア52が、スリーブ355によって提供されている。
この実施形態は、先行する実施形態を基礎的形態とする変形例である。上記実施形態では、支持部23と被駆動体31とが直接的に接触可能である。これに代えて、この実施形態では、支持部23と被駆動体31との間に、隙間、すなわち空洞が設けられている。
この実施形態は、先行する実施形態を基礎的形態とする変形例である。上記実施形態では、被駆動体31とシャフト51とが固定されており、ガイドボア52は支持部23に設けられている。これに代えて、この実施形態では、支持部523とシャフト551とが固定されており、被駆動体531にガイドボア552が設けられている。この実施形態の構造は、他の実施形態と組合せ可能である。
この実施形態は、先行する実施形態を基礎的形態とする変形例である。上記実施形態では、2つのアクチュエータ素子41、42が利用されている。これに代えて、ひとつのアクチュエータ素子41だけを備えてもよい。この場合、第2のアクチュエータ素子42に代えて、受動的な回動機構を用いることができる。受動的な回動機構は、ゴム、樹脂製バネ、金属製バネ、空気バネなど多様な機構により提供することができる。受動的な回動機構は、戻し機構と呼ばれる。
この明細書における開示は、例示された実施形態に制限されない。開示は、例示された実施形態と、それらに基づく当業者による変形態様を包含する。例えば、開示は、実施形態において示された部品および/または要素の組み合わせに限定されない。開示は、多様な組み合わせによって実施可能である。開示は、実施形態に追加可能な追加的な部分をもつことができる。開示は、実施形態の部品および/または要素が省略されたものを包含する。開示は、ひとつの実施形態と他の実施形態との間における部品および/または要素の置き換え、または組み合わせを包含する。開示される技術的範囲は、実施形態の記載に限定されない。開示されるいくつかの技術的範囲は、請求の範囲の記載によって示され、さらに請求の範囲の記載と均等の意味及び範囲内での全ての変更を含むものと解されるべきである。
21 固定部、 22 固定部、 23 支持部、
3 可動部、 31 被駆動体、
4 アクチュエータ機構、
41 アクチュエータ素子、 42 アクチュエータ素子、
41a 素材線、 41b 固定端、 41c 出力端、
41d 発熱線、
5 案内機構、 51 シャフト、 52 ガイドボア、
7 制御システム、 70 制御装置、
71、72 エネルギ増減装置、
253 摺動部材、 254 摺動部材、
355 スリーブ、
G453 隙間、 G454 隙間、
551 シャフト、 552 ガイドボア、
523 支持部、 531 被駆動体、
622 戻し機構、 661 弾性部材、
AX41 アクチュエータ軸、 AXR 回動軸。
Claims (8)
- エネルギの増減によってアクチュエータ軸(AX41、AX42)周りの変形を生じるアクチュエータ素子(41、42)と、
前記アクチュエータ軸上において前記アクチュエータ素子と連結された被駆動体(31、531)と、
前記アクチュエータ軸と同軸の回動軸(AXR)の周りにおいて、前記アクチュエータ素子のねじり変形を直接的に取り出すように、前記被駆動体を案内する案内機構(5)と、
前記アクチュエータ素子のエネルギを増減させるエネルギ増減装置(71、72)と、
前記アクチュエータ素子のエネルギが増加する期間と、前記アクチュエータ素子のエネルギが減少する期間とを交互に繰り返すように前記エネルギ増減装置を制御する制御装置(70)とを備え、
前記アクチュエータ素子は、前記被駆動体に対して対称的に配置されており、変形方向が対称的な方向である第1のアクチュエータ素子(41)、および、第2のアクチュエータ素子(42)とを備え、
前記制御装置は、
前記第1のアクチュエータ素子のエネルギが増加し、前記第2のアクチュエータ素子のエネルギが減少する期間と、
前記第1のアクチュエータ素子のエネルギが減少し、前記第2のアクチュエータ素子のエネルギが増加する期間とを交互に繰り返して前記被駆動体を揺動させ、
前記案内機構は、シャフト(51、551)と、ガイドボア(52、552)とを備え、前記被駆動体は、前記シャフトの周りにおいて案内されている可動装置。 - 前記シャフトと、前記ガイドボアとは、軸方向に相対的に移動可能であり、
前記アクチュエータ素子は、エネルギの増減によって前記アクチュエータ軸の方向に関する長さが変化する長さ変動量を有し、
前記シャフトと前記ガイドボアとの間の相対的な移動可能な長さは、前記アクチュエータ素子の前記長さ変動量より大きい請求項1に記載の可動装置。 - さらに、固定の基台(2)と、前記基台に固定された支持部とを備え、
前記被駆動体(31)は、前記シャフト(51)を有し、
前記支持部(23)は、前記ガイドボア(52)を有する請求項1または請求項2に記載の可動装置。 - さらに、固定の基台(2)と、前記基台に固定された支持部とを備え、
前記被駆動体(531)は、前記ガイドボア(552)を有し、
前記支持部(523)は、前記シャフト(551)を有する請求項1または請求項2に記載の可動装置。 - 前記シャフトおよび/または前記ガイドボアを形成する部材が低摩擦材料製である請求項1から請求項4のいずれかに記載の可動装置。
- 前記アクチュエータ素子は、熱エネルギの増減によって前記アクチュエータ軸周りの変形を生じる請求項1から請求項5のいずれかに記載の可動装置。
- 前記アクチュエータ素子は、前記被駆動体および前記案内機構を経由して放熱する請求項6に記載の可動装置。
- 前記アクチュエータ素子は、合成繊維である請求項1から請求項7のいずれかに記載の可動装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017057941A JP6841115B2 (ja) | 2017-03-23 | 2017-03-23 | 可動装置 |
| CN201880018754.6A CN110462208A (zh) | 2017-03-23 | 2018-03-07 | 可动装置 |
| PCT/JP2018/008672 WO2018173742A1 (ja) | 2017-03-23 | 2018-03-07 | 可動装置 |
| US16/575,097 US11002256B2 (en) | 2017-03-23 | 2019-09-18 | Movable device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017057941A JP6841115B2 (ja) | 2017-03-23 | 2017-03-23 | 可動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018161009A JP2018161009A (ja) | 2018-10-11 |
| JP2018161009A5 JP2018161009A5 (ja) | 2019-05-30 |
| JP6841115B2 true JP6841115B2 (ja) | 2021-03-10 |
Family
ID=63585324
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017057941A Active JP6841115B2 (ja) | 2017-03-23 | 2017-03-23 | 可動装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11002256B2 (ja) |
| JP (1) | JP6841115B2 (ja) |
| CN (1) | CN110462208A (ja) |
| WO (1) | WO2018173742A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10975851B2 (en) * | 2019-04-01 | 2021-04-13 | Johnson Controls Technology Company | Torque box actuator with shape memory alloy |
| CN110848104B (zh) * | 2019-12-01 | 2021-09-28 | 西北工业大学 | 一种形状记忆合金丝驱动的机械虹膜装置 |
| GB202116400D0 (en) * | 2021-11-15 | 2021-12-29 | Cambridge Mechatronics Ltd | An actuator assembly |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3665705A (en) * | 1969-11-10 | 1972-05-30 | Edwin S Christensen | Thermal engines |
| US4175390A (en) * | 1974-12-27 | 1979-11-27 | George Koslow | Solid stress motor |
| US4553394A (en) * | 1983-04-15 | 1985-11-19 | Friedrich Weinert | Spindle drive with expansible chamber motors |
| US4887430A (en) * | 1988-12-21 | 1989-12-19 | Eaton Corporation | Bistable SME actuator with retainer |
| US5127228A (en) * | 1991-02-07 | 1992-07-07 | Swenson Steven R | Shape memory bi-directional rotary actuator |
| JPH09325818A (ja) * | 1996-06-05 | 1997-12-16 | Tokuji Sawara | 駆動装置 |
| US6065934A (en) * | 1997-02-28 | 2000-05-23 | The Boeing Company | Shape memory rotary actuator |
| US6129181A (en) * | 1998-05-26 | 2000-10-10 | Lockheed Corp | Constant force spring actuator |
| US6006522A (en) * | 1998-08-10 | 1999-12-28 | Lockheed Martin Corporation | Translational actuator |
| US6945045B2 (en) | 2001-10-01 | 2005-09-20 | Minolta Co., Ltd. | Driving apparatus |
| JP3638016B2 (ja) * | 2001-10-01 | 2005-04-13 | コニカミノルタフォトイメージング株式会社 | 形状記憶合金を用いた駆動装置及び駆動制御方法 |
| KR20060041164A (ko) * | 2003-05-02 | 2006-05-11 | 알프마이어 프레치지온 악티엔게젤샤프트 바우그룹펜 운트 지스템뢰중엔 | 일체형 형상 기억 합금 액츄에이터를 갖는 게이지 포인터 |
| US20040252005A1 (en) * | 2003-06-10 | 2004-12-16 | The Boeing Company | Shape memory alloy MEMS component deposited by chemical vapor deposition |
| US7658715B2 (en) * | 2005-05-04 | 2010-02-09 | Fluid Medical | Miniature actuator mechanism for intravascular imaging |
| JP4395180B2 (ja) * | 2006-09-05 | 2010-01-06 | イヴァン ゴドレール | 運動変換装置 |
| US7481055B2 (en) * | 2006-11-28 | 2009-01-27 | Thermotion Corporation | Rotary actuator |
| EP2880755B1 (en) * | 2012-08-01 | 2019-10-02 | The Board of Regents,The University of Texas System | Coiled and non-coiled twisted nanofiber yarn and polymer fiber torsional and tensile actuators |
| US9488161B2 (en) * | 2013-03-21 | 2016-11-08 | Terry W. Thompson | Thermal expansion drive devices and related methods |
| US9638176B2 (en) * | 2013-05-10 | 2017-05-02 | The Boeing Company | Vortex generator using shape memory alloys |
| CN103352820B (zh) * | 2013-07-12 | 2015-03-25 | 江苏大学 | 基于齿轮齿条传动且由形状记忆效应驱动的旋转装置 |
| US20170314539A1 (en) | 2014-10-22 | 2017-11-02 | Industry-University Cooperation Foundation Hanyang University | Rotation-type actuator actuated by temperature fluctuation or temperature gradient and energy harvesting device using same |
| CN104454414A (zh) * | 2014-10-23 | 2015-03-25 | 上海卫星工程研究所 | 基于sma材料的驱动装置 |
| EP3334028A4 (en) * | 2015-08-04 | 2018-07-25 | Panasonic Intellectual Property Management Co., Ltd. | Actuator |
| US10982739B2 (en) * | 2016-04-29 | 2021-04-20 | Lintec Of America, Inc. | Bi-stable actuator devices |
| JP6714858B2 (ja) | 2016-09-12 | 2020-07-01 | 株式会社デンソー | アクチュエータ装置 |
| WO2018055972A1 (ja) * | 2016-09-20 | 2018-03-29 | 株式会社デンソー | アクチュエータ装置 |
| JP6784206B2 (ja) | 2017-03-23 | 2020-11-11 | 株式会社デンソー | 可動装置 |
| JP2018161010A (ja) | 2017-03-23 | 2018-10-11 | 株式会社デンソー | 可動装置、その製造方法、および、その制御方法 |
| JP6794892B2 (ja) | 2017-03-23 | 2020-12-02 | 株式会社デンソー | 可動装置 |
| JP2018159351A (ja) | 2017-03-23 | 2018-10-11 | 株式会社デンソー | 可動装置 |
-
2017
- 2017-03-23 JP JP2017057941A patent/JP6841115B2/ja active Active
-
2018
- 2018-03-07 CN CN201880018754.6A patent/CN110462208A/zh active Pending
- 2018-03-07 WO PCT/JP2018/008672 patent/WO2018173742A1/ja active Application Filing
-
2019
- 2019-09-18 US US16/575,097 patent/US11002256B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US11002256B2 (en) | 2021-05-11 |
| CN110462208A (zh) | 2019-11-15 |
| US20200011305A1 (en) | 2020-01-09 |
| JP2018161009A (ja) | 2018-10-11 |
| WO2018173742A1 (ja) | 2018-09-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6841115B2 (ja) | 可動装置 | |
| JP6794892B2 (ja) | 可動装置 | |
| JP6784206B2 (ja) | 可動装置 | |
| WO2018047505A1 (ja) | アクチュエータ装置 | |
| CN101896719A (zh) | 形状记忆合金致动装置 | |
| JP2007004121A (ja) | モータ、モータ装置及びそれを用いるレンズ駆動機構 | |
| JP2022532931A (ja) | 可変焦点アセンブリ | |
| US11025178B2 (en) | Actuator device | |
| WO2018055972A1 (ja) | アクチュエータ装置 | |
| US11596294B2 (en) | Variable stiffness device and method of varying stiffness | |
| WO2018173743A1 (ja) | 可動装置、その製造方法、および、その制御方法 | |
| WO2018173744A1 (ja) | 可動装置 | |
| US20220290659A1 (en) | Thermal actuator arrangement having improved reset time | |
| JP2009122605A (ja) | 形状記憶合金を用いた駆動装置 | |
| WO2019159754A1 (ja) | アクチュエータ装置 | |
| WO2022007201A1 (zh) | 驱动组件、相机模块和具有拍摄功能的电子设备 | |
| JP2019146466A (ja) | アクチュエータ装置 | |
| KR101681221B1 (ko) | 압전형 스텝 모터 | |
| JP2019080439A (ja) | 可動装置 | |
| JPWO2018092906A1 (ja) | 磁気式動力伝達構造体及びアクチュエータ | |
| KR101648805B1 (ko) | 압전형 스텝 모터 | |
| GB2612116A (en) | SMA actuator assembly | |
| Mammano et al. | Optimization and testing of a continuous rotary motor based on shape memory wires and overrunning clutches | |
| WO2022152375A1 (en) | Shape memory alloy actuator architecture for driving adjustable aperture | |
| KR20220169988A (ko) | 카메라 렌즈 이동 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190416 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190416 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200331 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200518 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200923 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201103 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210119 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210201 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6841115 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |