JP2018009832A - 人感システム、電子機器、人感センサ、および人間を検出する方法 - Google Patents
人感システム、電子機器、人感センサ、および人間を検出する方法 Download PDFInfo
- Publication number
- JP2018009832A JP2018009832A JP2016137465A JP2016137465A JP2018009832A JP 2018009832 A JP2018009832 A JP 2018009832A JP 2016137465 A JP2016137465 A JP 2016137465A JP 2016137465 A JP2016137465 A JP 2016137465A JP 2018009832 A JP2018009832 A JP 2018009832A
- Authority
- JP
- Japan
- Prior art keywords
- pair
- human
- temperature
- sensor surface
- temperature difference
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F1/00—Details not covered by groups G06F3/00 - G06F13/00 and G06F21/00
- G06F1/26—Power supply means, e.g. regulation thereof
- G06F1/32—Means for saving power
- G06F1/3203—Power management, i.e. event-based initiation of a power-saving mode
- G06F1/3206—Monitoring of events, devices or parameters that trigger a change in power modality
- G06F1/3231—Monitoring the presence, absence or movement of users
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F1/00—Details not covered by groups G06F3/00 - G06F13/00 and G06F21/00
- G06F1/16—Constructional details or arrangements
- G06F1/20—Cooling means
- G06F1/206—Cooling means comprising thermal management
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P13/00—Indicating or recording presence, absence, or direction, of movement
- G01P13/0006—Indicating or recording presence, absence, or direction, of movement of fluids or of granulous or powder-like substances
- G01P13/006—Indicating or recording presence, absence, or direction, of movement of fluids or of granulous or powder-like substances by using thermal variables
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P5/00—Measuring speed of fluids, e.g. of air stream; Measuring speed of bodies relative to fluids, e.g. of ship, of aircraft
- G01P5/10—Measuring speed of fluids, e.g. of air stream; Measuring speed of bodies relative to fluids, e.g. of ship, of aircraft by measuring thermal variables
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V9/00—Prospecting or detecting by methods not provided for in groups G01V1/00 - G01V8/00
- G01V9/005—Prospecting or detecting by methods not provided for in groups G01V1/00 - G01V8/00 by thermal methods, e.g. after generation of heat by chemical reactions
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B15/00—Systems controlled by a computer
- G05B15/02—Systems controlled by a computer electric
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING SYSTEMS, e.g. PERSONAL CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B13/00—Burglar, theft or intruder alarms
- G08B13/18—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING SYSTEMS, e.g. PERSONAL CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B13/00—Burglar, theft or intruder alarms
- G08B13/18—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength
- G08B13/181—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using active radiation detection systems
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/20—Pc systems
- G05B2219/26—Pc applications
- G05B2219/2642—Domotique, domestic, home control, automation, smart house
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02D—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN INFORMATION AND COMMUNICATION TECHNOLOGIES [ICT], I.E. INFORMATION AND COMMUNICATION TECHNOLOGIES AIMING AT THE REDUCTION OF THEIR OWN ENERGY USE
- Y02D10/00—Energy efficient computing, e.g. low power processors, power management or thermal management
Landscapes
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Geophysics (AREA)
- Chemical & Material Sciences (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Aviation & Aerospace Engineering (AREA)
- Air Conditioning Control Device (AREA)
- Indicating Or Recording The Presence, Absence, Or Direction Of Movement (AREA)
Abstract
Description
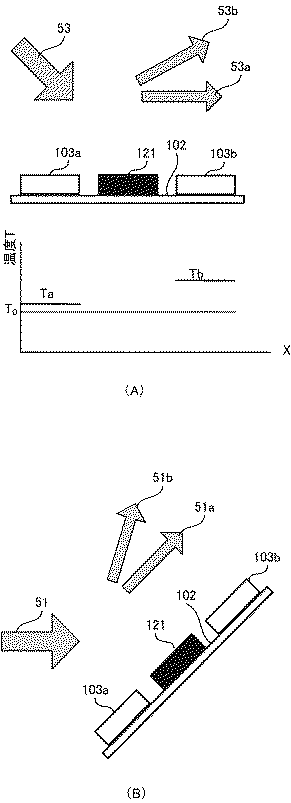
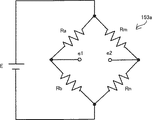
ここで、測温素子103a、103bの温度抵抗特性が同等で、抵抗RmとRnの抵抗値も同等であるとする。図5は、ヒータ121が発熱したときの抵抗素子103a、103bが検出する温度を説明する図である。図5(A)は、一切の空気流がなく、環境温度がT0のユーザ空間10において、ヒータ121が発熱したときに抵抗素子103a、103bが検出する空気の温度Ta、Tbを示している。
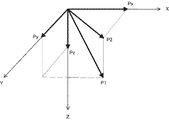
51、53、55 空気流
100 人感システム
101 センサ・ユニット
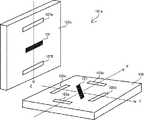
102、102a センサ面
103a、103b、105c、105d、107e、107f、123 測温素子
121、131 ヒータ
180 電子機器
167 加速度センサ
Claims (17)
- 人間の運動で空気流が発生するユーザ空間に配置するセンサ面と、
前記センサ面に配置され前記ユーザ空間の空気を局部的に加熱する発熱素子と、
前記発熱素子を挟んで前記センサ面の第1の方向に配置された第1の測温素子のペアと、前記発熱素子を挟んで前記センサ面の第2の方向に配置された第2の測温素子のペアと、
前記第1の測温素子のペアと前記第2の測温素子のペアがそれぞれ検出する温度差から人間の存在を示す検出信号を生成する判定回路と
を有する人感システム。 - 前記判定回路が前記第1の測温素子のペアが検出した温度差と、前記第2の測温素子のペアが検出した温度差から流速ベクトルを計算する請求項1に記載の人感システム。
- 前記判定回路は、前記流速ベクトルの方向が所定の方向のときに前記検出信号をノイズと判断する請求項2に記載の人感システム。
- 前記判定回路は、前記センサ面の傾斜を計測して前記センサ面が傾斜するときの前記流速ベクトルを水平な前記センサ面での流速ベクトルに補正する請求項2に記載の人感システム。
- さらに前記センサ面が存在する平面に対して所定の角度の第3の方向に配置した第3の測温素子のペアを含み、前記判定回路が前記第1の測温素子のペアと前記第2の測温素子のペアと前記第3の測温素子のペアがそれぞれ検出した温度差から3次元の流速ベクトルを計算する請求項1に記載の人感システム。
- 前記判定回路は、前記3次元の流速ベクトルの方向が所定の方向のときに前記検出信号をノイズと判断する請求項5に記載の人感システム。
- 前記判定回路は、前記3次元の流速ベクトルが所定位置以上の鉛直方向の成分を含むときに前記検出信号をノイズと判断する請求項5に記載の人感システム。
- 前記センサ面に対する所定の方向からの空気流を阻止するカバーを有する請求項1に記載の人感システム。
- 人間の運動で空気流が発生するユーザ空間に配置するセンサ面と、
前記センサ面に配置され前記ユーザ空間の空気を局部的に加熱する発熱素子と、
前記センサ面の前記発熱素子の周囲に配置され、前記センサ面の複数の方向の温度差を検出する測温素子と、
前記複数の方向の温度差から人間の存在を示す検出信号を生成する判定回路と、
前記検出信号に応じて所定の動作を開始する入力部と
を有する電子機器。 - 人間の移動で空気流が発生するユーザ空間に配置する第1のセンサ面と、
前記第1のセンサ面に配置され前記ユーザ空間の空気を局部的に加熱する発熱素子と、
前記発熱素子を挟んで前記第1のセンサ面の第1の方向に配置された第1の測温素子のペアと、前記発熱素子を挟んで前記第1のセンサ面の第2の方向に配置された第2の測温素子のペアと、
前記空気流により発生した前記ユーザ空間の温度差をそれぞれ検出して前記第1の測温素子のペアが生成した温度差信号と前記第2の測温素子のペアが生成した温度差信号を出力する出力回路と
を有する人感センサ。 - 前記第1のセンサ面が存在する平面に所定の角度で交差する第2のセンサ面と、
前記第2のセンサ面に配置され前記ユーザ空間の空気を局部的に加熱する発熱素子と、
前記発熱素子を挟んで前記第2のセンサ面に配置された第3の測温素子のペアを有し、
前記出力回路は前記空気流により発生した前記ユーザ空間の温度差を検出して前記第3の測温素子のペアが生成した温度差信号を出力する請求項10に記載の人感センサ。 - 人間の移動で空気流が発生するユーザ空間の第1の所定の位置の周辺の空気の温度を環境温度に対して上昇させるステップと、
前記第1の所定の位置の近辺の空気の温度をそれぞれ第1の平面上に存在し前記第1の所定の位置を挟んで対向する第1の位置のペアと第2の位置のペアで計測するステップと、
前記第1の位置のペアの温度差と前記第2の位置のペアの温度差に基づいて人間の存在を認識するステップと
を有する人間の検出方法。 - 前記認識するステップが、前記第1の位置のペアの温度差と前記第2の位置のペアの温度差から前記第1の平面に沿って流れる空気流に対応するベクトルを計算するステップを含む請求項12に記載の方法。
- ノイズとなる空気流を登録するステップを有し、
前記認識するステップが、前記ベクトルの方向が前記登録した空気流の方向のときに人間の存在を認識しない請求項13に記載の方法。 - 前記第1の位置のペアと前記第2の位置のペアに対する所定値以上の鉛直方向の成分を含む空気流の流れを阻止するステップを有する請求項13に記載の方法。
- 前記ユーザ空間の第2の所定の位置の周辺の空気の温度を前記環境温度に対して上昇させるステップを有し、
前記計測するステップが、前記第1の平面に所定の角度で交差する第2の平面上に存在し前記第2の所定の位置を挟んで対向する第3の位置のペアで温度を計測するステップを含み、前記認識するステップが、前記第1の位置のペアの温度差と前記第2の位置のペアの温度差と前記第3の位置のペアの温度差から3次元のベクトルを計算するステップを含む請求項12に記載の方法。 - 前記認識するステップが、前記3次元のベクトルが所定値以上の大きさの鉛直方向の成分を含むときに人間の存在を認識しない請求項16に記載の方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016137465A JP6170650B1 (ja) | 2016-07-12 | 2016-07-12 | 人感システム、電子機器、人感センサ、および人間を検出する方法 |
| CN201710463241.3A CN107608004B (zh) | 2016-07-12 | 2017-06-19 | 人感系统、电子设备、人感传感器、以及对人进行检测的方法 |
| DE102017115441.8A DE102017115441A1 (de) | 2016-07-12 | 2017-07-10 | Personendetektionssystem, elektronisches Gerät, Personendetektionssensor und Personendetektionsverfahren |
| GB1711076.8A GB2554153B (en) | 2016-07-12 | 2017-07-10 | Human detection system, electronic device, human detecting sensor, and human detection method |
| US15/647,021 US10656691B2 (en) | 2016-07-12 | 2017-07-11 | User detection apparatus, systems, and methods |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016137465A JP6170650B1 (ja) | 2016-07-12 | 2016-07-12 | 人感システム、電子機器、人感センサ、および人間を検出する方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6170650B1 JP6170650B1 (ja) | 2017-07-26 |
| JP2018009832A true JP2018009832A (ja) | 2018-01-18 |
Family
ID=59384394
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016137465A Active JP6170650B1 (ja) | 2016-07-12 | 2016-07-12 | 人感システム、電子機器、人感センサ、および人間を検出する方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10656691B2 (ja) |
| JP (1) | JP6170650B1 (ja) |
| CN (1) | CN107608004B (ja) |
| DE (1) | DE102017115441A1 (ja) |
| GB (1) | GB2554153B (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA3101005A1 (en) | 2018-06-01 | 2019-12-05 | Stress Engineering Services, Inc. | Systems and methods for monitoring, tracking and tracing logistics |
| JP7259700B2 (ja) * | 2019-10-30 | 2023-04-18 | 新東工業株式会社 | 判定装置、及び検出装置 |
| US11585557B2 (en) | 2020-07-01 | 2023-02-21 | International Business Machines Corporation | Anomaly detection based on airflow alerters |
| US11512861B2 (en) | 2020-07-01 | 2022-11-29 | International Business Machines Corporation | Anomaly detection based on airflow measurement |
| CN114166356B (zh) * | 2021-12-06 | 2024-02-13 | 普联技术有限公司 | Pir阈值调整方法、pir阈值调整系统以及监测装置 |
| WO2023158624A2 (en) * | 2022-02-15 | 2023-08-24 | Stress Engineering Services, Inc. | Systems and methods for facilitating logistics |
| US11790744B1 (en) | 2022-04-26 | 2023-10-17 | International Business Machines Corporation | Intrusion movement prediction |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5541576B2 (ja) | 1974-10-09 | 1980-10-24 | ||
| JPS633267A (ja) * | 1986-06-23 | 1988-01-08 | Murata Mfg Co Ltd | 流体の流れ方向検知装置 |
| JP2529895B2 (ja) | 1990-07-13 | 1996-09-04 | 山武ハネウエル株式会社 | フロ―センサ |
| JP2563642Y2 (ja) * | 1992-01-31 | 1998-02-25 | 矢崎総業株式会社 | 移動体の検知装置 |
| US5493618A (en) * | 1993-05-07 | 1996-02-20 | Joseph Enterprises | Method and apparatus for activating switches in response to different acoustic signals |
| US5777837A (en) * | 1995-02-02 | 1998-07-07 | Hubbell Incorporated | Three wire air gap off power supply circuit for operating switch and regulating current when switch or load is open |
| US5971597A (en) * | 1995-03-29 | 1999-10-26 | Hubbell Corporation | Multifunction sensor and network sensor system |
| US6909921B1 (en) * | 2000-10-19 | 2005-06-21 | Destiny Networks, Inc. | Occupancy sensor and method for home automation system |
| JP4293940B2 (ja) * | 2003-05-27 | 2009-07-08 | 日機装株式会社 | 流量測定方法および装置 |
| US20060125624A1 (en) * | 2004-08-18 | 2006-06-15 | Michael Ostrovsky | Passive infrared motion sensor |
| US7231825B2 (en) * | 2004-11-08 | 2007-06-19 | Sauer-Danfoss Inc. | Accelerometer based tilt sensor and method for using same |
| US7728316B2 (en) * | 2005-09-30 | 2010-06-01 | Apple Inc. | Integrated proximity sensor and light sensor |
| US7409871B2 (en) * | 2006-03-16 | 2008-08-12 | Celerity, Inc. | Mass flow meter or controller with inclination sensor |
| JP2007285996A (ja) | 2006-04-20 | 2007-11-01 | Ritsumeikan | 熱感知型加速度センサ |
| US7411497B2 (en) * | 2006-08-15 | 2008-08-12 | Lawrence Kates | System and method for intruder detection |
| WO2010063001A1 (en) * | 2008-11-26 | 2010-06-03 | Wireless Environment, Llc | Wireless lighting devices and applications |
| US8521449B2 (en) * | 2009-06-06 | 2013-08-27 | International Business Machines Corporation | Three dimensional air flow sensors for data center cooling |
| JP5541576B2 (ja) * | 2010-03-31 | 2014-07-09 | 三菱マテリアル株式会社 | 風向風速計および風向風速装置 |
| JP2015180853A (ja) * | 2012-07-31 | 2015-10-15 | シャープ株式会社 | 情報処理装置、情報処理方法、および、情報処理装置を備えた電気製品 |
| US9239257B2 (en) * | 2012-09-21 | 2016-01-19 | Sierra Instruments, Inc. | Mass flow meter configured with computational modeling for use with different fluids |
| JP2016039447A (ja) | 2014-08-06 | 2016-03-22 | キヤノン株式会社 | 画像出力装置、画像出力方法、及びプログラム |
| US9951965B2 (en) * | 2014-09-02 | 2018-04-24 | Vivint, Inc. | Smart HVAC |
| US9982906B2 (en) * | 2014-10-23 | 2018-05-29 | Vivint, Inc. | Real-time temperature management |
-
2016
- 2016-07-12 JP JP2016137465A patent/JP6170650B1/ja active Active
-
2017
- 2017-06-19 CN CN201710463241.3A patent/CN107608004B/zh active Active
- 2017-07-10 DE DE102017115441.8A patent/DE102017115441A1/de active Pending
- 2017-07-10 GB GB1711076.8A patent/GB2554153B/en active Active
- 2017-07-11 US US15/647,021 patent/US10656691B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| GB2554153B (en) | 2020-09-02 |
| US10656691B2 (en) | 2020-05-19 |
| US20180018005A1 (en) | 2018-01-18 |
| DE102017115441A1 (de) | 2018-01-25 |
| CN107608004B (zh) | 2020-07-24 |
| JP6170650B1 (ja) | 2017-07-26 |
| CN107608004A (zh) | 2018-01-19 |
| GB2554153A (en) | 2018-03-28 |
| GB201711076D0 (en) | 2017-08-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6170650B1 (ja) | 人感システム、電子機器、人感センサ、および人間を検出する方法 | |
| US20150091810A1 (en) | User Interface of an Electronic Apparatus for Adjusting Dynamically Sizes of Displayed Items | |
| CN102971704B (zh) | 电子设备热管理 | |
| US20230107211A1 (en) | Systems and methods for operating a mems device based on sensed temperature gradients | |
| JP6350212B2 (ja) | 内部温度測定装置 | |
| JP5914388B2 (ja) | 熱式流体計測装置 | |
| JP6081983B2 (ja) | 体温計及び体温測定システム | |
| US10809132B2 (en) | Infrared sensor for measuring ambient air temperature | |
| JP2009212719A (ja) | 入力装置および電子機器 | |
| KR101484916B1 (ko) | 위치 확인의 정확도를 높인 디지타이저 | |
| JP2016164525A (ja) | 温度測定装置及び温度測定方法 | |
| WO2015137075A1 (ja) | 内部温度測定方法及び内部温度測定装置 | |
| EP2808650B1 (en) | Portable electronic device | |
| CN111542735A (zh) | 具有热导率补偿的核心温度传感器 | |
| JP6582769B2 (ja) | 電子機器 | |
| CN109891249B (zh) | 辐射热计流体流动和温度传感器 | |
| JP2022043028A (ja) | モーション・キャプチャ・システム | |
| JP6443280B2 (ja) | 電子装置 | |
| WO2024143146A1 (ja) | 測定装置及び測定ユニット | |
| JP5856930B2 (ja) | 無線通信端末、方法、およびプログラム | |
| JP2004117157A (ja) | 熱式流量計 | |
| US20130025369A1 (en) | Inertial Measurement Systems, and Methods of Use and Manufacture Thereof | |
| WO2021157016A1 (ja) | 通知装置および通知方法 | |
| CN109891205B (zh) | 传感器以及操作传感器的方法 | |
| KR20260035766A (ko) | 일체형 촉각 스위치를 갖는 힘 감지 사용자 입력 부재 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170607 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170620 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170701 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6170650 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |