JP2017193913A - 作業船 - Google Patents
作業船 Download PDFInfo
- Publication number
- JP2017193913A JP2017193913A JP2016086046A JP2016086046A JP2017193913A JP 2017193913 A JP2017193913 A JP 2017193913A JP 2016086046 A JP2016086046 A JP 2016086046A JP 2016086046 A JP2016086046 A JP 2016086046A JP 2017193913 A JP2017193913 A JP 2017193913A
- Authority
- JP
- Japan
- Prior art keywords
- tamper
- arm
- leveling
- angle
- boom
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Landscapes
- Underground Or Underwater Handling Of Building Materials (AREA)
Abstract
Description
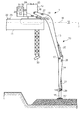
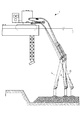
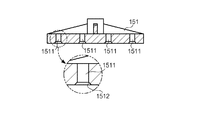
以下に本発明の一実施形態にかかる作業船1を説明する。図1は側方から見た作業船1の外観を模式的に示した図である。作業船1は、水面Wの上に浮かぶ船体11と、船体11の上に配置された上部旋回体12と、上部旋回体12に連結されたブーム13と、ブーム13に連結されたアーム14と、アーム14に連結されたタンパ15を備える。以下、上部旋回体12、ブーム13およびアーム14の連結体を便宜的にバックホウ10と呼ぶ。
上述の実施形態は本発明に一具体例であって、本発明の技術的思想の範囲内において様々に変形可能である。以下にそれらの変形の例を示す。なお、下記の2以上の変形例が適宜組み合わされてもよい。
Claims (5)
- 船上に配置された上部旋回体に水平軸回りに回転可能に連結されたブームと、
前記ブームに水平軸回りに回転可能に連結されたアームと、
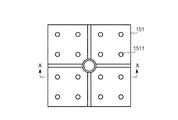
振動機構から振動が伝達される均し板を用いて水中均し面を均すタンパと、
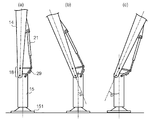
前記アームの先端において前記タンパを水平軸回りに回転可能に連結し、かつ、その回転範囲が前記アームの長手方向に伸びる線の両側を含む範囲に設定されている連結手段と、
前記連結手段に力を伝達することにより、前記タンパの水平軸回りの角度を変化させる駆動手段と
を備えることを特徴とする作業船。 - 前記均し板は、1以上の貫通孔を有することを特徴とする
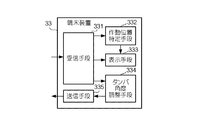
請求項1に記載の作業船。 - 前記上部旋回体と前記ブームの位置関係を示すデータと、前記ブームと前記アームの位置関係を示すデータと、前記アームと前記タンパの位置関係を示すデータとに基づいて前記タンパの作動位置を特定する作動位置特定手段を備える
ことを特徴とする請求項1または2に記載の作業船。 - 水底の形状を特定する水底形状特定手段と、
前記作動位置特定手段の特定結果と前記水底形状特定手段の特定結果を用いて前記タンパによる施工状況を表示する表示手段と
を備えることを特徴とする請求項3に記載の作業船。 - 水底の形状を特定する水底形状特定手段と、
前記水底形状特定手段の特定結果に基づいて前記タンパの作動位置における水平均し面の傾斜角を特定し、特定した傾斜角を持つ水中均し面の法線に前記タンパの振動方向が沿うように、前記第3の角度特定手段の特定結果を参照しながら前記駆動手段を制御して前記タンパの角度を調整するタンパ角度調整手段と
を備えることを特徴とする請求項3に記載の作業船。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016086046A JP6243958B2 (ja) | 2016-04-22 | 2016-04-22 | 作業船 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016086046A JP6243958B2 (ja) | 2016-04-22 | 2016-04-22 | 作業船 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017193913A true JP2017193913A (ja) | 2017-10-26 |
| JP6243958B2 JP6243958B2 (ja) | 2017-12-06 |
Family
ID=60155472
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016086046A Active JP6243958B2 (ja) | 2016-04-22 | 2016-04-22 | 作業船 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6243958B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109343038A (zh) * | 2018-09-30 | 2019-02-15 | 河海大学 | 一种声纳探测支架及沉箱接缝量测方法 |
| JP2019167720A (ja) * | 2018-03-22 | 2019-10-03 | 株式会社フジタ | 建設機械の自動制御システム |
| JP2019167719A (ja) * | 2018-03-22 | 2019-10-03 | 株式会社フジタ | 建設機械の操作補助システム |
| JP2023133946A (ja) * | 2022-03-14 | 2023-09-27 | 東洋建設株式会社 | 捨石均し用重錘及び捨石均し方法 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4614460A (en) * | 1981-01-26 | 1986-09-30 | Klas Heyman | Support structure |
| JPS6245826A (ja) * | 1985-08-21 | 1987-02-27 | Wakachiku Kensetsu Kk | 水中で振動衝撃装置を使用する工法 |
| JPS62181643U (ja) * | 1986-05-06 | 1987-11-18 | ||
| JPS6378921A (ja) * | 1986-09-22 | 1988-04-09 | Toyo Kensetsu Kk | 水中捨石均し工法 |
| JPS63312412A (ja) * | 1987-06-12 | 1988-12-20 | Zenitakagumi:Kk | 水中締固め工法 |
| JPH10152839A (ja) * | 1996-09-30 | 1998-06-09 | Honmagumi:Kk | 水中捨石均し装置 |
| JPH10227041A (ja) * | 1996-10-11 | 1998-08-25 | Katsuyuki Hasegawa | バケット装置 |
| JP2002070013A (ja) * | 2000-08-31 | 2002-03-08 | Ohmoto Gumi Co Ltd | 水中捨石均し装置および水中捨石均し方法 |
-
2016
- 2016-04-22 JP JP2016086046A patent/JP6243958B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4614460A (en) * | 1981-01-26 | 1986-09-30 | Klas Heyman | Support structure |
| JPS6245826A (ja) * | 1985-08-21 | 1987-02-27 | Wakachiku Kensetsu Kk | 水中で振動衝撃装置を使用する工法 |
| JPS62181643U (ja) * | 1986-05-06 | 1987-11-18 | ||
| JPS6378921A (ja) * | 1986-09-22 | 1988-04-09 | Toyo Kensetsu Kk | 水中捨石均し工法 |
| JPS63312412A (ja) * | 1987-06-12 | 1988-12-20 | Zenitakagumi:Kk | 水中締固め工法 |
| JPH10152839A (ja) * | 1996-09-30 | 1998-06-09 | Honmagumi:Kk | 水中捨石均し装置 |
| JPH10227041A (ja) * | 1996-10-11 | 1998-08-25 | Katsuyuki Hasegawa | バケット装置 |
| JP2002070013A (ja) * | 2000-08-31 | 2002-03-08 | Ohmoto Gumi Co Ltd | 水中捨石均し装置および水中捨石均し方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019167720A (ja) * | 2018-03-22 | 2019-10-03 | 株式会社フジタ | 建設機械の自動制御システム |
| JP2019167719A (ja) * | 2018-03-22 | 2019-10-03 | 株式会社フジタ | 建設機械の操作補助システム |
| JP2022173478A (ja) * | 2018-03-22 | 2022-11-18 | 株式会社フジタ | 建設機械の自動制御システム |
| CN109343038A (zh) * | 2018-09-30 | 2019-02-15 | 河海大学 | 一种声纳探测支架及沉箱接缝量测方法 |
| JP2023133946A (ja) * | 2022-03-14 | 2023-09-27 | 東洋建設株式会社 | 捨石均し用重錘及び捨石均し方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6243958B2 (ja) | 2017-12-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6243958B2 (ja) | 作業船 | |
| JP7144252B2 (ja) | 積込機械の制御装置および制御方法 | |
| CA2401587C (en) | Apparatus for deploying a load to an underwater target position with enhanced accuracy and a method to control such apparatus | |
| JP5554366B2 (ja) | 天端面均し方法、海底基礎施工方法、および天端面均しシステム | |
| JP5565957B2 (ja) | 3次元ソナーによる施工管理方法とその施工管理装置 | |
| AU2000234653A1 (en) | Apparatus for deploying a load to an underwater target position with enhanced accuracy and a method to control such apparatus | |
| JP2008144379A (ja) | 遠隔操縦作業機の画像処理システム | |
| JP6618856B2 (ja) | 施工システム及び施工方法 | |
| JP4787202B2 (ja) | 浚渫支援システム | |
| WO2020044834A1 (ja) | バケット高さ通知装置およびバケット高さ通知方法 | |
| CN113661294B (zh) | 建筑设备 | |
| JP5565964B2 (ja) | 水中掘削・均し作業機による掘削・均しの方法とその施工管理装置 | |
| JP5780218B2 (ja) | 水中施工装置とその施工方法 | |
| JP6246168B2 (ja) | 水中捨石均し方法 | |
| JP7449314B2 (ja) | ショベル、遠隔操作支援装置 | |
| JP4960145B2 (ja) | 均し装置 | |
| JP2008208529A (ja) | バックホウ浚渫船の施工支援システムによる水中施工方法 | |
| JP2002070013A (ja) | 水中捨石均し装置および水中捨石均し方法 | |
| JP2003278158A (ja) | バックホウ台船の施工管理方法 | |
| JPS6378921A (ja) | 水中捨石均し工法 | |
| JP2012026190A (ja) | 既設構造物付近における水中作業方法と水中作業用装置 | |
| JP2019203297A (ja) | 管理システム | |
| JPS63210614A (ja) | 杭打設における杭の鉛直矯正方法 | |
| CA2490839C (en) | Apparatus for deploying a load to an underwater target position with enhanced accuracy and a method to control such apparatus | |
| JP2009047699A (ja) | ナビゲーション・プロセッサ、該ナビゲーション・プロセッサを備えた処理構成、該ナビゲーション・プロセッサを備えた測定システム及び水中システムの位置及び姿勢を測定する方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170803 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171110 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6243958 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |