以下、本発明に係る傾斜情報計測装置の実施形態について、図面を参照して説明する。なお、本発明における実施形態は、以下の実施形態に限定されるものではない。
(第1実施形態)
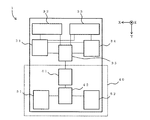
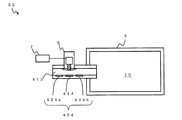
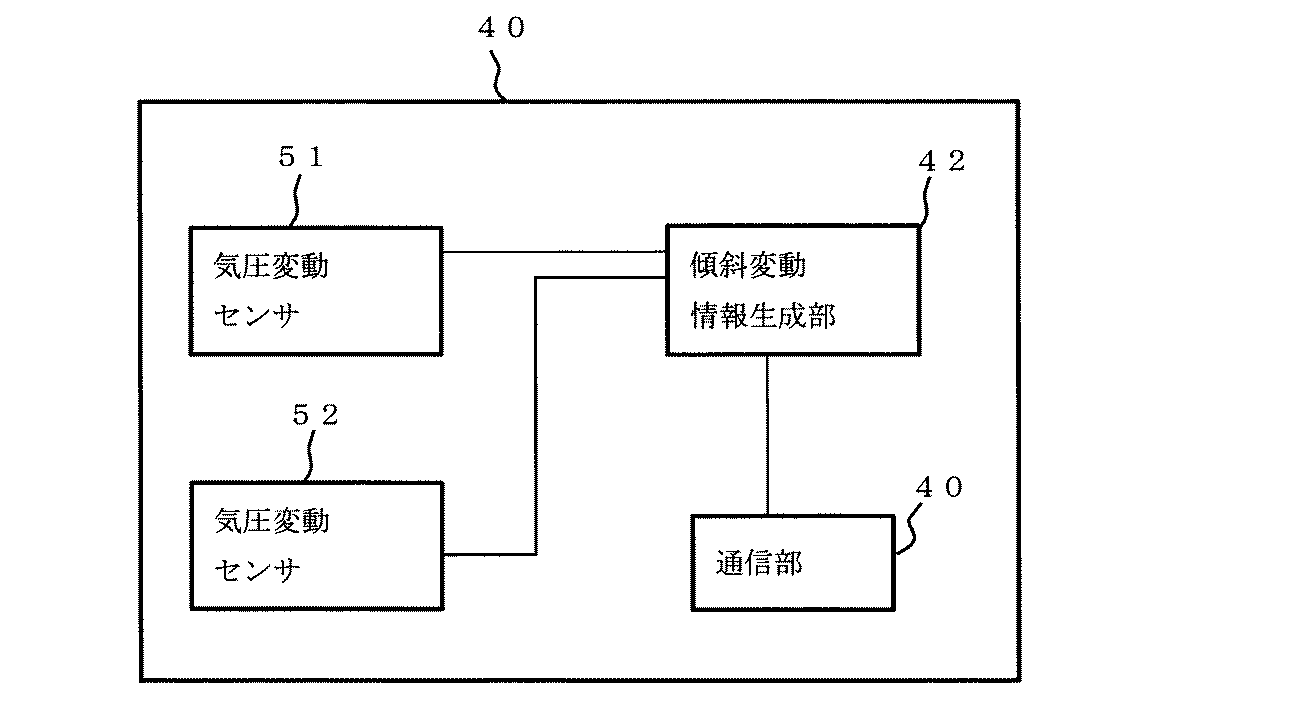
図1から図3を参照して、第1実施形態に係る傾斜情報計測装置1の構成について説明する。図1は、本実施形態に係る傾斜情報計測装置1の一例を示す外観図である。また、図2は、本実施形態に係る傾斜情報計測装置1の一例を示すブロック図である。また、図3は、本実施形態における傾斜変動センサ40の一例を示すブロック図である。
なお、本実施形態において、傾斜情報計測装置1は大気圧中での傾斜を計測する装置であり、本実施形態での圧力伝達媒体は空気とする。
図1、図2に示すように、傾斜情報計測装置1は、電源部31と、静止傾斜センサ32と、静止判定部33と、記憶部34と、制御部35と、傾斜変動センサ40を備えている。また、傾斜変動センサ40は、通信部41と、傾斜変動情報生成部42と、二つの気圧変動センサ51及び52とを備えている。
なお、本実施形態において、気圧変動センサ51と気圧変動センサ52とは、ほぼ同一の構成であるが、気圧変動センサ52のみに出力特性調整機構が付加されている。
本実施形態に係る傾斜情報計測装置1は、測定対象物に設置され、測定対象物の傾斜情報を検出する。ここで、計測対象物の傾斜情報には、計測対象物の傾斜角θ、水平度、傾斜の有無を示す情報などが一例として挙げられる。本実施形態では、傾斜情報計測装置1が、計測対象物の傾斜角θを検出する例について説明する。
傾斜情報計測装置1は、例えば、図1に示すように、電源部31と、静止傾斜センサ32と、静止判定部33と、記憶部34と、制御部35と、傾斜変動センサ40とが一つの基板に実装されており、例えば数〜十数cm規模のサイズに実装可能である。
また、本実施形態では、傾斜情報計測装置1が検出する傾斜角θの検出方向を、図1に示すY軸周りの回転方向とし、高度の方向をZ軸方向として説明する。
電源部31は、傾斜情報傾斜装置1を動作させるための電源電圧を生成し、生成した電源電圧を各部に供給する。
静止傾斜センサ32は、例えば、加速度センサを使用した傾斜センサ等であり、計測対象物が静止している状態における計測対象物の傾斜角θ(静止傾斜角θs)を、静止傾斜情報として検出する。静止傾斜センサ32は、検出した計測対象物の傾斜角θ(静止傾斜角θs)を制御部35に出力する。
静止判定部33は、計測対象物が静止しているか否かを判定する。ここで、測定対象物とは、例えば、人体、自転車、バイク、自動車等の移動可能な移動体である。例えば、計測対象物が、その測位情報を取得する測位システム、例えばGPSシステム等を搭載している場合には、静止判定部33は、GPSシステムによって取得された測位情報の変化に基づいて、計測対象物が静止している否かを判定する。この場合、静止判定部33は、例えば、GPSシステムによって取得された計測対象物の位置が所定の期間変化しない場合に、計測対象物が静止していると判定する。
また、例えば、静止判定部33は、加速度センサによって取得された加速度に基づいて、計測対象物が静止しているか否かを判定する。この場合、加速度センサからの出力信号に対してフィルタリングを行い、所定の遮断周波数以上の出力信号を取り出すことで、重力加速度の影響を排除し、計測対象物の動きのみを示す加速度情報を取り出すことができる。
この場合、静止判定部33は、例えば、所定の遮断周波数以上の加速度情報が、所定の期間、所定閾値以下にある場合に、計測対象物が静止していると判定する。
また、例えば、計測対象物が、移動速度を取得する速度計等を有する移動体である場合には、静止判定部33は、速度計によって取得された移動速度に基づいて、計測対象物が静止しているか否かを判定する。この場合、静止判定部33は、例えば、速度計によって取得された移動速度を取得し、所定の期間、移動速度でゼロである場合に、計測対象物が静止していると判定する。
また、例えば、計測対象物が、自動車などの車輪駆動によって移動可能な移動体である場合には、静止判定部33は、車輪の駆動状態に基づいて、計測対象物が静止しているか否かを判定する。すなわち、静止判定部33は、車輪の回転の有無を示す回転有無情報を計測対象物から取得して、その回転有無情報に基づいて、計測対象物が静止しているか否かを判定する。
この場合、静止判定部33は、例えば、回転有無情報が、所定の期間、「回転なし」である場合に、計測対象物が静止しているか否かを判定する。
静止判定部33は、計測対象物が静止しているか否かを示す判定結果を制御部35に出力する。
なお、静止判定部33は、上述した計測対象物の静止の判定方法のいずれか一つによって、計測対象物が静止しているか否かを判定してもよいし、複数の判定方法を組み合わせて判定してもよい。
また、静止判定部33を用いず、静止傾斜センサ32の出力に低い遮断周波数でのローパスフィルターを接続して、このフィルター出力を静止傾斜角θsとしてもよい。ローパスフィルターの働きにより、静止しているかどうかに関わらず重力加速度のみを取り出すことができ、おおよその静止傾斜角θsを求めることが可能となる。
傾斜変動センサ40は、図1,図3に示すように、通信部41と、傾斜変動情報生成部42と、二つの気圧変動センサ51、52とを備えている。
気圧変動センサ51、52は、気圧の変動を検出する差圧センサである。気圧変動センサ51及び52とは、検出方向(Y軸周りの回転方向に対して高度差があるX軸方向)に沿って所定の距離(例えば、距離D)を離して配置されている。気圧変動センサ51及び52は、検出した気圧の変動を例えば検出信号(気圧変動情報)として、傾斜変動情報生成部42に出力する。なお、傾斜変動センサ40の構成の詳細および気圧変動センサ51、52の構成の詳細については、後述する。
また、本実施形態において、説明の便宜上、気圧変動センサが二つである場合の一例について説明するが、傾斜変動センサ40は、3個以上の気圧変動センサを備えるようにしてもよい。すなわち、傾斜変動センサ40は、少なくとも二つの気圧変動センサを備えるものとする。
通信部41は、傾斜変動センサ40と制御部35との間で、各種情報の授受を行うインターフェース部である。通信部41は、たとえば、後述する傾斜変動情報生成部42が生成した傾斜変動情報(高度変動情報ΔHD)を制御部35に送信する。
気圧変動情報生成部42は、少なくとも2つの気圧変動センサ(例えば気圧変動センサ51及び52)によって検出された気圧の変動を示す気圧変動情報に基づいて、計測対象物の傾斜角の変動に関する情報を示す傾斜変動情報を生成する。例えば、傾斜変動情報生成部42は、2つの気圧変動情報に基づいて、二つの気圧変動センサ51、52の高度差の変動を示す高度変動情報を、上述した傾斜変動情報として生成する。
例えば、傾斜変動情報生成部42は、気圧変動センサ51が検出した検出信号(気圧変動情報)と、気圧変動センサ52が検出した検出信号(気圧変動情報)との差分(気圧変動情報の差分情報ΔP)を算出する。この気圧変動情報の差分情報ΔPは、気圧変動センサ51と気圧変動センサ52との高度差に対応する。傾斜変動情報生成部42は、気圧変動情報の差分情報ΔPを、例えば、変換テーブル等を利用して、高度変動情報ΔHDを生成する。
記憶部34は、傾斜情報計測装置1が使用する各種情報を記憶する。記憶部34は、例えば、計測対象物の傾斜情報の初期値(傾斜角初期値θ0)、二つの気圧変動センサ51、52との距離D等を記憶する。
制御部35(傾斜情報検出部の一例)は、例えば、CPU等を含むプロセッサであり、傾斜情報計測装置1を統括的に制御する。制御部35は例えば、傾斜情報計測装置1の起動時に、静止判定部33から計測対象物が静止しているか否かを示す判定結果を取得して、計測対象物が静止したと判定されるまで当該処理を繰り返す。制御部35は、計測対象物が静止したと判定された場合に、静止傾斜センサ32から取得した静止傾斜情報(静止傾斜角θs)を、傾斜各初期値θ0として、記憶部34に記憶させる。
また、制御部35は、記憶部34が記憶する傾斜角初期値θ0と、傾斜変動情報(高度変動情報ΔHD)とに基づいて、計測対象物の傾斜角θを検出する。例えば、制御部35は、傾斜角初期値θ0を、上述した二つの気圧変動センサ51、52との距離Dと傾斜変動情報(高度変動情報ΔHD)とに基づいて、現在の計測対象物の傾斜角θを算出する。すなわち、制御部35は、例えば、静止傾斜情報(静止傾斜角θs=傾斜角初期値θ0)と、上述した所定の距離を示す距離情報(距離D)と、高度変動情報ΔHDとに基づいて、計測対象物の傾斜角θを検出する。
このように、制御部35は、例えば、静止判定部33によって計測対象物が静止していると判定された場合に、静止傾斜センサ32によって検出された静止傾斜情報(静止傾斜角θs)と、傾斜変動情報生成部42によって生成された傾斜変動情報(高度変動情報ΔHD)とに基づいて、計測対象物の傾斜角θを検出する。なお、制御部35による計測対象物の傾斜角θの算出処理の詳細については、後述する。
また、制御部35は、計測対象物の傾斜角θを検出した後に、記憶部34が記憶する傾斜角初期値θ0を更新する。すなわち、制御部35は、検出した当該計測対象物の傾斜角θを新たな初期値(傾斜角初期値θ0)として、記憶部34に記憶させる。
次に、図4、図5を参照して、本実施形態における気圧変動センサ51の詳細な構成について説明する。
図4は本実施形態による気圧変動センサ51の一例を示す構成図である。
図4(a)は、本実施形態における気圧変動センサ51の一例を示す平面図であり、図4(b)は、図4(a)に示すA−A線に沿った気圧変動センサ51の断面図である。
図4に示すように、気圧変動センサ51は、表裏の圧力差に応じて変形するカンチレバー4と、一端がカンチレバー4と対向するように配設された蓋部12と、カンチレバー4の変位を測定するための気圧変動検出部5と、カンチレバー4と蓋部12の一面に配設されたキャビティ筐体3と、を有している。
キャビティ筐体3(センサ本体の一例)は、内部にキャビティ10が形成された箱状の部材である。キャビティ筐体3は、例えば、キャビティ10を構成するセラミック材よりなる第一筐体部3aと、第一筐体部3a上に配置され、かつ後述のシリコン支持層2a及びシリコン酸化膜等の酸化層2bよりなる第二筐体部3bとを有している。
カンチレバー4は例えば、シリコン支持層2a、シリコン酸化膜等の酸化層2b、及びシリコン活性層2cを熱的に貼り合わせたSOI基板2を加工することで形成されている。具体的には、カンチレバー4は、SOI基板2を構成するシリコン活性層2cよりなり、平板状のシリコン活性層2cから平面視コ字状に形成されたギャップ13を切り出した形状からなる。これにより、カンチレバー4は、基端部4aを固定端とし、蓋部12と対向する側の端部である先端部4bを自由端とした片持ち梁構造となる。
また、カンチレバー4は、キャビティ筐体3に形成されたキャビティ10の上面を囲うように配置されている。つまり、カンチレバー4は、キャビティ10の開口を略閉塞している。カンチレバー4は、基端部4aを介してキャビティ筐体3に第二筐体部3b上に対して一体的に固定されることで、片持ち支持される。これにより、カンチレバー4は、基端部4aを固定端としてキャビティ10の内部と外部との圧力差(差圧)に応じた撓み変形が可能となる。
このように、カンチレバー4は、空気をキャビティ10の内外に流通させるギャップ13(連通孔)を除くキャビティ10の開口面を塞ぐように基端部4aから先端部4bに向けて一方向に延びる板状であり、キャビティ10の内部と外部との圧力差に応じて撓み変形する。
なお、カンチレバー4の基端部4aには、カンチレバー4が撓み変形しやすいように、平面視コ字状の貫通孔15が形成される。ただし、この貫通孔15の形状は、カンチレバー4の撓み変形を容易にする形状ならば、上記コ字状に限定されるものではない。
蓋部12は、キャビティ10上方に位置し、ギャップ13を介してカンチレバー4の周囲に配置されている。当該蓋部12は、シリコン活性層2cで構成される。
気圧変動検出部5は、外部から加わる応力に応じて電気抵抗が変化するピエゾ抵抗20と、この電気抵抗値変化を取り出す検出回路22から構成されている。
ピエゾ抵抗20は、図4に示すように、Y方向において、貫通孔15を挟んだ両側に対となって配置される。これら一対のピエゾ抵抗20は、導電性材料からなる配線部21を介して相互に電気的に接続されている。
なお、この配線部21及びピエゾ抵抗20を含む全体的な形状は、例えば、図4に示すように平面視U字状とすることができるが別の配置形状としてもよい。
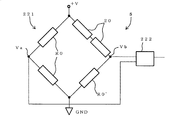
検出回路22は、ピエゾ抵抗20と接続され、ピエゾ抵抗20の電気抵抗値変化に基づいた信号を出力する回路である。検出回路22は、例えば、図5に示すように、ブリッジ回路及び増幅回路で構成される。すなわち、検出回路22は、ピエゾ抵抗20と、固定抵抗Ro、可変抵抗Ro’を用いて、ブリッジ回路221を構成することで、ピエゾ抵抗20の電気抵抗値の変化を電圧変化として取り出すことができる。
そして検出回路22は、この電圧変化を、例えば、差動増幅回路222により所定のゲインで増幅して出力する。
なお、上記のピエゾ抵抗20は、例えば、イオン注入法や拡散法等の各種によりリンやホウ素等のドープ剤(不純物)をシリコン活性層2cにドーピングすることで形成される。また、ドープ剤は、シリコン活性層2c表面近傍のみに添加される。このため、ピエゾ抵抗20の電気抵抗値の変化は、カンチレバー4に加わる応力の圧縮/伸長の方向に対して正負逆となる。
また、一対のピエゾ抵抗20間は、配線部21のみで電気的に導通するように構成されている。このため、カンチレバー4のうち配線部21近傍におけるシリコン活性層2cは、配線部21以外でピエゾ抵抗20双方が導通しないよう、エッチング等によりシリコン活性層2cを除去して形成した溝部16を有している。なお、上記の配線部21近傍におけるシリコン活性層2cは、部分的に不純物をドープされることで、エッチングを省略した構成としてもよい。
次に、本実施形態における気圧変動センサ52の詳細な構成について説明する。
図6は、本実施形態における気圧変動センサ52の一例を示す平面図であり、図7は、図6に示すA−A線に沿った気圧変動センサ52の断面図である。なお、前述の気圧変動センサ51と同様の構成については、詳細な説明を省略する。
図6、図7に示すように、気圧変動センサ52は、上述の気圧変動センサ51同様の構成であるカンチレバー4と、蓋部12と、気圧変動検出部5と、キャビティ筐体3とを有し、これに加え、出力特性調整機構を備えている。出力特性調整機構は、SOI基板2に形成されたギャップ形成部6と、ギャップ制御部7(不図示)とを有している。
ギャップ形成部6は、例えば、静電アクチュエータであって、2つの櫛歯型の第一および第二の固定電極部61、62と、平板状の第三電極部63と、可動電極部64と、可動電極部64に弾性力を作用させる板ばね部65と、板ばね部65を支持する固定部66とを有している。
可動電極部64は、2つの櫛歯型の第一及び第二固定電極部61、62に噛みあうように配置される櫛歯型の2つの第一及び第二電極部64a、64bを備え、キャビティ筐体3に固定された第三固定電極部63に積層されるようにして配置されている。可動電極部64は、先端部64cとカンチレバー4の先端部4bとの間にギャップ13を形成している。
板ばね部65は、可動電極部64と固定部66とに接続され、可動電極部64を所定の基準位置に維持するようにして可動電極部64に弾性力を作用させる。所定の基準位置は、たとえば、可動電極部64の先端部64cを、所定距離をおいてカンチレバー4の先端部4bに対向配置させるとともに、可動電極部64を、積層方向に所定距離をおいて第三固定電極部63に対向配置させる位置である。なお、可動電極部64と板ばね部65と固定部66とは電気的にも接続されている。
可動電極部64は、板ばね部65の弾性力に抗うように作用する第一固定電極部61と第一電極部64aとの間の静電力によって、カンチレバー4の先端部4bに対向配置された先端部64cをカンチレバー4の先端部4bに向かい近接させるように変位可能である。
また、可動電極部64は、板ばね部65の弾性力に抗うように作用する第二固定電極部62と第二電極部64bとの間の静電力によって、先端部64cをカンチレバー4の先端部4bから離間させるように変位可能である。また、可動電極部64は、板ばね部65の弾性力に抗うように作用する可動電極部64と第三固定電極部63との間の静電力によって、第三固定電極部63に向かい近接および接触するように変位可能である。
ギャップ制御部7は、所定値記憶部71と、比較回路72と、処理回路73と、駆動回路74と、駆動回路74から出力される信号(駆動出力)に応じて通電が制御される第一〜第三電圧可変直流電源75a、75b、75cとを有する。
所定値記憶部71は、例えば、気圧変動センサ52の周波数特性の目標値である下限周波数(所定値)を記憶している。
比較回路72は、検出回路22から出力された検出出力、つまり検出回路22によって検出されたカンチレバー4の変位の検出値と、所定値記憶部71に記憶されている所定値とを比較し、比較結果(例えば、気圧変動センサ51、52の出力差等)を出力する。
処理回路73は、比較回路72から出力されて比較結果に基づき、ギャップの幅を所定記憶部71によって記憶されている所定値に応じたギャップ13の幅になるよう制御を行う。そして、この所定値に応じたギャップ13の幅に制御するために必要とされる指令値(例えば、可動電極部64の先端部64cとカンチレバー4の先端部4bとの間に設けられたギャップ13の幅に対する指令値等)を出力する。つまり、この指令値は、ギャップ13の幅及びギャップ13を流通する圧力伝達媒体の流量を、所定値に基づいて算出された規定値にすることを指示する。
なお、処理回路73は、指令値が所定の上限値もしくは下限値を超えた場合、制御不可のエラー信号等を出力する。
駆動回路74は、処理回路73から出力された指令値に応じてギャップ形成部6を作動させるための信号(駆動出力)を出力する。より、詳細には、第一〜第三電圧可変直流電源75a、75b、75cからギャップ形成部6への通電を指示する信号によって可動電極部64の変位を制御する。
次に、出力特性調整機構の動作について図8を用いて説明する。
図8は気圧変動センサ52が有する出力特性調整機構(ギャップ形成部及びギャップ制御部)の動作を説明する断面図である。
図8(a)に示すように、第一電圧可変直流電源75aは、第一固定電極部61と、可動電極部64とに接続されている。第一電圧可変直流電源75aは、第一固定電極部61と可動電極部64との間に所定電圧を印加することによって、第一固定電極部61と可動電極部64の第一電極部64aとの間に静電引力を発生させ、可動電極部64の先端部64cがカンチレバー4の先端部4bに向かい近接するように可動電極部64を変位させる。
図8(b)に示すように、第二電圧可変直流電源75bは、第二固定電極部62と可動電極部64とに接続されている。第二電圧可変直流電源75bは、第二固定電極部62と可動電極部64との間に所定電圧を印加することによって、第二固定電極部62と可動電極部64の第二電極部64bとの間に静電引力を発生させ、可動電極部64の先端部64cがカンチレバー4の先端部4bから離間するように可動電極部64を変位させる。
図8(c)に示すように、第三電圧可変直流電源75cは、可動電極部64と第三固定電極部63とに接続されている。第三電圧可変直流電源75cは、可動電極部64と第三固定電極部63との間に静電引力を発生させ、可動電極部64が第三固定電極部63に向かい近接および接触するように可動電極部64を変位させる。
これらによって、駆動回路74は、可動電極部64の先端部64cとカンチレバー4の先端部4bとの間に設けられたギャップ13の幅を制御できる。ギャップ13の幅は、所定値記憶部71に記憶されている所定値に基づいて設定されるギャップ幅に制御される。
さらに、駆動回路74は、可動電極部64を第三固定電極部63に接触させることによって、カンチレバー4に対する可動電極部64の相対位置を固定する。
なお、上述した気圧変動センサ51、52は、SOI基板2のシリコン活性層2cを利用して半導体プロセス技術によりカンチレバー4を形成できるので、非常に薄型化(例えば数から数百nm厚)、高精度な寸法精度を維持して製造しやすい。したがって、気圧変動センサ50は、微小な圧力変動の検出を精度よく行うことができる。
次に、図面を参照して、本実施形態による傾斜情報計測装置1の動作について説明する。
まず、図9及び図10を参照して、本実施形態における気圧変動センサ51、52の動作について説明する。
ここでは、計測対象物の高度が変化することで、大気(空気)の圧力が変化した場合のカンチレバー4の動作と、その時の検出回路22の出力特性について説明する。なお、以下の説明において、空気の圧力波、以下、外圧Poutと表記することとする。
外圧Poutは、カンチレバー4のキャビティ筐体3への配設面と対向する面(すなわち、図4における上面)側の圧力である。また、キャビティ10内部の圧力を内圧Pinと定義する。
図9は、本実施形態における気圧変動センサ51、52の出力信号の一例を示す図である。ここで、図9(a)は、外圧Poutおよび内圧Pinの経時変化を示しており、図9(b)は、検出回路22の出力信号の経時変化を示している。
また、図10は、本実施形態における気圧変動センサ51、52の動作の一例を示す図であり、図4に示す気圧変動センサ51の、図6及び7に示す気圧変動センサ52のカンチレバー4の動作の一例を模式的に示す断面図である。
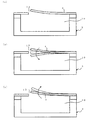
ここで、図10(a)は、初期状態のカンチレバー4の断面図を示し、図10(b)は、外圧Poutが内圧Pinより高い状態のカンチレバー4の断面図を示している。また、図10(c)は、キャビティ10内外の圧力が同じに戻った状態のカンチレバー4の断面図を示している。また、図10において、検出回路22の図示を省略する。
まず、図9(a)における時刻t1以降の期間Bのように、例えば、外圧Poutがステップ状に上昇すると、内圧Pinは急激に変化できず、差圧ΔPが生じるため、図10(b)に示すように、カンチレバー4は、キャビティ10内部に向けて撓み変形する。すると、カンチレバー4の撓み変形に応じてピエゾ抵抗20に応力が加わり、電気抵抗値が変化するので、図9(b)に示すように、検出回路22の出力信号が増大する。
また、外圧Poutの上昇以降(時刻t1以降)において、ギャップ13を介してキャビティ10の外部から内部へと圧力伝達媒体(空気)が徐々に流動する。このため、図9(a)に示すように、内圧Pinは、時間の経過とともに、外圧Poutに遅れながら、かつ外圧Poutの変動よりも緩やかな応答で上昇する。
その結果、内圧Pinが外圧Poutに徐々に近づくので、カンチレバー4の撓みが徐々に小さくなり、図9(b)に示すように、上述の出力信号が徐々に低下する。
そして、図9(a)に示す時刻t3以降の期間Dのように、内圧Pinが外圧Poutと同じになると、図10(c)に示すように、カンチレバー4の撓み変形が解消され、図10(a)に示す初期状態に復帰する。さらに、図9(b)に示すように、検出回路22の出力信号も期間Aの初期状態と同値に戻る。
なお、検出回路22の出力信号は初期状態における基準電圧と、ピエゾ抵抗20の抵抗変化に基づいて増幅された信号との加算となる。初期状態における基準電圧は、カンチレバー4に加わる差圧ΔPがゼロの場合の、図5に示したブリッジ回路221の分圧点Vaと分圧点Vbとの電圧差を作動増幅回路222で増幅した電圧値となる。
さらに、気圧変動センサ51、52では、外圧Poutが非常に緩やかに変化する場合、ギャップ13による圧力伝達媒体(空気)の流動制限機能が作用せず、内圧Pinは外圧Poutとほぼ同じ圧力値となり、差圧ΔPが発生しない。本実施形態では、これを逆に利用し、外圧Poutが非常に遅い変化速度の場合(例えば、気象変化のような気圧変化の場合)、外圧Poutの変化を無視することが可能となる。よって、傾斜現象とは無縁の気象変化のような気圧変化をノイズとして除去することが可能となる。
次に、図11を参照して、上述した気圧変動センサ51、52を備える傾斜変動センサ40の動作について説明する。
図11は、本実施形態における傾斜変動センサ40の動作の一例を示すフローチャートである。
まず、計測対象物に装着された傾斜情報計測装置1が、上述したX軸が傾斜した(Y軸周りに回転した)場合、二つの気圧変動センサ51、52に大気圧(上述した外圧Pout)が変化する(ステップS101)。
すると、気圧変動センサ51のキャビティ10内部の内圧である内圧Pinは、ステップS101における外圧Poutの変化に追従するように変化する(ステップS102)。
ここで、ギャップ13は、キャビティ10内外を連通する連通孔として機能するため、カンチレバー4の表裏に加わる差圧に応じて、高圧側から低圧側へと圧力伝達媒体である空気が移動する。ただし、空気の移動が微小なギャップ13によって規制されているため、内圧Pinは、外圧Poutの変化に応じて急激に変化することはなく、外圧Poutの変化に対して遅れて追従することとなる。
次に、カンチレバー4表裏面には、上述の外圧Poutの変化に対する内圧Pinの遅れによって、圧力差(以下、差圧ΔP=Pout−Pin)が発生する(ステップS103)。その結果、カンチレバー4は、差圧ΔPの大きさに応じて撓み変形する(ステップS104)。
次に、カンチレバー4が撓み変形すると、カンチレバー4の基端部4aに受けられたピエゾ抵抗20に応力が加わり(ステップS105)、ピエゾ抵抗20の電気抵抗値が変化する(ステップS106)。ここで、検出回路22は、ピエゾ抵抗20へ電流を流すことで、ピエゾ抵抗20の電気抵抗値の変化を検出し、当該電気抵抗値の変化に応じた検出信号を出力する(ステップS107)。
次に、傾斜変動情報生成部42は、二つの気圧変動センサ51、52によって検出された二つの検出信号に基づいて、高度変動情報ΔHDを生成する(ステップS108)。
上述したように、傾斜変動センサ40は、二つの気圧変動センサ51、52の検出信号に基づいて、高度変動情報ΔHDを生成するが、その生成処理について、図12、図13を参照して説明する。
図12は、本実施形態による傾斜変動センサ40の水平時(静止時)における出力信号の一例を説明する図である。
図12(a)において、傾斜情報計測装置1は、計測対象物に取り付けされており、傾斜対象物が水平に静止している場合の状態を示している。また、図12(b)は、計測対象物が水平に静止している場合における二つの気圧変動センサ51、52の出力信号(検出信号)を示している。
図12(b)に示すグラフの縦軸は出力電圧を示し、横軸は時間を示している。
また、図12(b)において、波形V11が気圧変動センサ51の出力信号を示し、波形V21が気圧変動センサ52の出力信号を示し、波形Diff1は波形V11と波形V21の差を示している(Diff1=V11−V21)。
図12において、計測対象物が静止しているため、気圧変動センサ51の出力信号(波形V11)、気圧変動センサ52の出力信号(波形V21)、その差分(波形Diff1)は、すべて“0”になっている。なお、この状態は、計測対象物が水平であることに限らず、傾斜している状態であっても同様である。
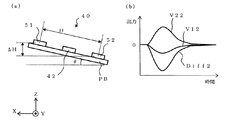
次に、図13は、本実施形態による傾斜変動センサ40の傾斜時における出力信号の一例を示す説明図である。
ここでは、図12に示す状態から図13に示す状態に計測対象物が傾斜した場合の一例である。
図13(a)において、傾斜情報計測装置1は、計測対象物がプリント基板PBの中点を中心、かつY軸周りに傾斜角θだけ傾斜(回転)している場合の状態を示している。また、図13(b)は、計測対象物の傾斜時における二つの気圧変動センサ51、52の出力信号(検出信号)を示している。
図13(b)に示すグラフの縦軸は出力電圧を示し、横軸は時間を示している。
また、図13(b)において、波形V12が気圧変動センサ51の出力信号を示し、波形V22が気圧変動センサ52の出力信号を示し、波形Diff2は波形V12と波形V22の差を示している(Diff2=V12−V22)。
プリント基板PBが傾斜すると、気圧変動センサ51、52は、それぞれ高度が変化するため、各気圧変動センサ51、52周囲の気圧が変化し、出力が変化する。すなわち、図13(b)に示すように、気圧変動センサ51の出力信号(波形V12)と、気圧変動センサ52の出力信号(波形V22)とは、符号が反転した波形となり、その差分である波形Diff2は、波形V12より大きく変動した検出値となる。
ここで、波形Diff2は、計測対象物(プリント基板PB)が傾斜したことによる気圧変動センサ51、52の高さの変化分(高度変動情報ΔHD)に対応する信号である。したがって、傾斜変動情報生成部42は、気圧変動センサ51の検出値と、気圧変動センサ52の検出値との差分(波形Diff2)を算出し、算出した当該差分(波形Diff2)に基づいて高度変動情報ΔHDを生成する。
なお、例えば、気圧変動センサ52を中心にして回転した場合は、気圧変動センサ52の高度は不変なので、気圧変動センサ52の出力信号は“0”のままで、気圧変動センサ51の出力信号のみ変化する。この場合も、傾斜変動情報生成部42は、気圧変動センサ51の検出値と、気圧変動センサ52の検出値との差分を算出することで、同一の高度変動情報ΔHDを得ることができる。
ここで、図13を参照して、本実施形態による傾斜角θの検出原理について説明する。
図13(a)に示すように、気圧変動センサ51、52との高度差ΔH、気圧変動センサ51、52との間の距離D、X軸方向の傾斜角θである場合に、下記の式(1)の関係が成り立つ。
また、この式(1)を変形すると、傾斜角θは、以下の式(2)により算出することができる。
なお、図13に示す例は、水平状態からの傾斜であるため、気圧変動センサ51、52との高度差ΔH(=高度変動情報ΔHD)であるが、傾斜した状態で停止していた場合には、上記の式(2)では対応できない場合がある。
そのため、本実施形態による制御部35は、以下のように傾斜角θを算出する。
まず、制御部35は、傾斜した静止状態における二つの気圧変動センサ51、52の高度差ΔH0を、傾斜角初期値θ0(静止傾斜角θs)に基づいて算出する。制御部35は、例えば、上述した式(1)を変形した下記の式(3)と、傾斜角初期値θ0と、距離Dとに基づいて、静止時(前回算出時)の高度差ΔH0を算出する。
次に、制御部35は、傾斜変動情報生成部42が生成した高度変動情報ΔHDを、通信部41を介して取得し、静止時の高度差ΔH0に高度変動情報部ΔHDを加算した値を、高度差ΔHとして、下記の式(4)を用いて傾斜角θを算出する。
以上により、気圧変動センサ51、52の検出信号に基づいて、高度変動情報ΔHDを生成することができる。
上述したように、気圧変動センサ51、52の検出信号に基づいて、高度変動情報ΔHDを生成するが、このとき、気圧変動センサ51、52の出力特性をほぼ等しくする必要がある。気圧変動センサ51、52との出力特性が異なると、二つの検出信号の差分信号には気圧や高度変動によらない出力特性の差が重畳することとなる。
これを高度変化ひいては傾斜度変化と誤認することになり、傾斜角測定機能に誤差が生じるためである。
そこで、気圧変動センサ51、52の出力特性を可能な限り一致させるため、気圧変動センサ52の出力特性調整機構を用いる。
もともと、気圧変動センサ51、52は外圧Poutが非常にゆっくりとした気圧変動を検知しにくい特性を有し、外気圧Poutの変動周波数が低くなるにつれて、検出回路から出力信号が得られにくくなる。気圧変動センサ51、52の出力特性は、図14に示すように、ハイパスフィルターに類似した周波数特性を有する。
この周波数特性は、キャビティ10内部の容量と、キャビティ10内外の差圧によってギャップ13を流動する圧力伝達媒体の流量とによって定まる(特許第5778619号公報・参照)。
つまり、出力特性調整機構であるギャップ形成部6及びギャップ制御部7の動作により、圧力伝達媒体の流動量を制御できるため、気圧変動センサ52の周波数特性を制御することができる。
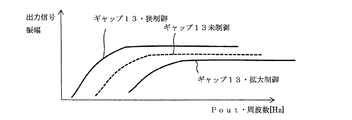
この出力特性調整方法の原理について、図14を用いて説明する。
図14は、上述した本実施形態の気圧変動センサ52の出力信号の周波数特性を示したグラフである。図14中、破線は出力特性調整機構であるギャップ形成部6及びギャップ制御部7が動作していない場合、実線はギャップ形成部6及びギャップ制御部7が動作して、ギャップ13を広げるよう制御した場合と、狭めるよう制御した場合との周波数特性について示している。
まず、気圧変動センサ52は、前述の気圧変動センサ51同様、キャビティ10外部の外圧Poutが変動した場合に生じるキャビティ10内部の内圧Pinと外圧Poutとの差圧ΔPに応じて出力信号を生成する。
すなわち、気圧変動センサ52は、前述の気圧変動センサ51同様、時刻t1で外圧Poutが上昇すると、内圧Pinはこれに遅れて上昇し、この時の差圧ΔP(=Pout−Pin)に応じてカンチレバーが変形することとなる。
ここで、気圧変動センサ52では、可動電極部64の先端部64cがカンチレバー4の先端部4bに向かい近接するようにして可動電極部64を変位することができる。すると、その間隙であるギャップ13の幅が狭まり、キャビティ10の外部と内部との間を流動する圧力伝達媒体の流動量を抑制することができる。
すると、キャビティ10内部の内圧Pinは外圧Poutよりさらに遅れて変化することとなり、差圧ΔPの発生する時間を長くすることができる。同時に外圧Poutが非常にゆっくり変化する場合でも、キャビティ10内部の内圧Pinが外圧Poutより遅れて変化することになるため、差圧ΔPが発生する。このため、低い周波数での外圧Poutでも気圧変動センサ52の出力信号が得られることとなる。
すなわち、出力特性調整機構であるギャップ形成部6及びギャップ制御部7を用いることで、圧力伝達媒体の流動量を制御できるため、気圧変動センサ52の周波数特性を低周波数側へ変化させることができる(図14中、狭制御)。
また、可動電極部64の先端部64cがカンチレバー4の先端部4bに対して離れるようにして可動電極部64を変位させると、ギャップ13の幅が広がり、圧力伝達媒体の流動量が大きくなる。このため、キャビティ内部の内圧Pinは外圧Poutに対して遅れ時間が短くなり、外圧Poutが早く変動しないと気圧変動センサ52の出力が得られなくなる。したがって、ギャップ制御部7を用いて、ギャップ形成部6を逆方向に動作させると、気圧変動センサ52の周波数特性を高周波数側へ変化させることも可能となる(図14中、拡大制御)。
以上により、出力特性調整機構を利用して、気圧変動センサ52の周波数特性を任意に制御することが可能となる。また、気圧変動センサ51、52の周波数特性(図14中、横軸方向の特性)を合わせた後、各々の出力信号の振幅値が異なる場合、気圧変動センサ52の処理回路73から検出回路22の増幅率を調整して、気圧変動センサ51の出力信号の振幅と一致させる。これにより、気圧変動センサ52の周波数特性(特に下限周波数)を、気圧変動センサ51の周波数特性にほぼ一致させることができる。
そして、気圧変動センサ51、52の出力特性の差を抑制できるため、傾斜情報計測装置1では高度変動情報ΔHDが高度差の影響のみを検出することができ、高精度に傾斜度を測定することが可能となる。
上述した二つの気圧変動センサ51、52の各々の周波数特性を近似させる気圧変動センサの調整方法について、図15を用いて詳細に説明する。
図15は、本実施形態における気圧変動センサ51、52の出力特性を近似させる調整方法の一例を示すフローチャートである。
調整に用いる構成として、例えば、次のような構成があげられる。外気圧の変動から遮断され、密閉された調整装置に二つの気圧変動センサ51、52を内蔵する。調整装置は、任意の周波数で気圧変動を生成することのできるポンプに接続されており、ポンプの動作によって調整装置内部の気圧が変動する構成とする。
まず、調整装置に接続されたポンプを駆動し(ステップS301)、所定の周波数、気圧変動幅で調整装置内部の気圧を変動させる。そして、ポンプを駆動させるポンプ駆動信号の周波数を徐々に低減する(ステップS302)。
次いで、ポンプ駆動信号と気圧変動センサ51の出力信号との位相差を比較し、所定値以下であるか判定する(ステップS303、出力特性計測ステップ)。ポンプ駆動信号と気圧変動センサ51の出力信号との位相差が所定値以上である場合(ステップS303:N)、処理をステップS302に戻る。ポンプ駆動信号と気圧変動センサ51の出力信号との位相差が所定値以下となった場合(ステップS303:Y)、ポンプ駆動信号の周波数低下を停止し、一定周波数で駆動する。この時の気圧変動センサ51の出力信号の振幅値を記憶する(ステップS304)。
次に、ポンプ駆動信号と気圧変動センサ52の出力信号との位相差が所定範囲内であるか判定する(ステップS305)。位相差が所定範囲外である場合(ステップS305:N)、出力特性調整機構を制御し(ステップS306)、処理をステップS305に戻る。このとき、ポンプ駆動信号の周波数が低下するにつれて、ポンプ駆動信号と気圧変動センサ52の出力信号との位相差は増加する特性を、気圧変動センサは有する。
このため、位相差が大きい場合は、ギャップ形成部6及びギャップ制御部7を用いて、ギャップ13の幅を狭く、逆に位相差が小さい場合は、ギャップ13の幅を広く制御する(調整ステップ1)。
位相差が所定範囲内である場合(ステップS305:Y)、処理をステップS307に進める。
次に、記憶した気圧変動センサ51の出力信号の振幅値と、気圧変動センサ52の出力信号の振幅値とを比較し、気圧変動センサ52の検出回路22の増幅率を変更する(ステップS307、調整ステップ2)。
次に、気圧変動センサ51、52の出力信号の差分を測定、所定範囲内か判定を行い(ステップS308)、所定範囲内であれば、処理を終了し、出力特性調整機構内の所定値記憶部71に最終的に記憶されたギャップ設定情報(ギャップ幅、増幅率等)を維持する。所定範囲外であれば(ステップS308:N)、エラー表示などのエラー処理を行う(ステップS309)。
以上の調整手法により、気圧変動センサ51、52の出力特性を近似させることができるため、二つの気圧変動センサ51、52で傾斜情報計測装置1を構成すると、同じ高度変化に対して同じ出力信号を得ることができる。このため、二つの気圧変動センサが検出した高度変化量から高精度に傾斜度を計測することが可能となる。
なお、調整ステップ1及び2両方を必ずしも調整する必要はない。例えば、傾斜変動情報生成部42が高度変動情報ΔHを生成する場合に、個々の気圧変動センサ51、52の出力信号に重みをつけて差分計算することで、気圧変動センサ51、52の特性の差を排除することができる。
次に図16を参照して、傾斜情報計測装置1の動作について説明する。
図16は、本実施形態による傾斜情報計測装置1の動作の一例を示すフローチャートである。
まず、傾斜情報計測装置1の制御部35は、計測対象物が静止状態であるか否かの有無判定を実行する(ステップS201)。すなわち、制御部35は、静止判定部33に、例えば、計測対象物が静止状態であるか否かを問い合わせる信号を送信する。静止判定部33は、計測対象物が静止状態であるか否かの判定を実行し、当該判定結果を制御部35に送信する。
次に、制御部35は、静止判定部33から取得した判定結果に基づいて、計測対象物が静止状態であるか否かを判定する(ステップS202)。制御部35は、計測対象物が静止状態である場合(ステップS202:Y)、処理をステップS203に進める。また、制御部35は、計測対象物が静止状態でない場合(ステップS202:N)、処理をステップS201に戻し、ステップS201及びステップ202の処理を、計測対象物が静止状態になるまで繰り返す。
ステップS203において、制御部35は、静止傾斜センサ32から静止傾斜度(静止傾斜角θs)を取得する。
次に、制御部35は、初期傾斜度(傾斜角初期値θ0)を設定する(ステップS204)。すなわち、制御部35は、取得した静止傾斜度(静止傾斜角θs)を、初期傾斜度(傾斜角初期値θ0)として、記憶部34に記憶させる。
次に、制御部35は、傾斜度変動を計測する(ステップS205)。ここで、傾斜変動センサ40の傾斜変動情報生成部42は気圧変動センサ51の検出値と、気圧変動センサ52の検出値との差分を算出し、算出した当該差分に基づいて、高度変動情報ΔHDを生成する。制御部35は、傾斜変動情報生成部42が生成した高度変動情報ΔHDを、傾斜変動情報として、傾斜変動センサ40から取得する。
次に、制御部35は、傾斜度(傾斜角θ)を算出する(ステップS206)。制御部35は、まず、記憶部34が記憶する初期傾斜度(傾斜角初期値θ0)を取得し、上述した式(3)を用いて、静止時、または前回前回算出した傾斜角θに対応する高度差ΔH0を算出する。次に、制御部35は、取得した高度変動情報ΔHDと、算出した当該高度差ΔH0とに基づいて、傾斜角算出用の高度差ΔH(=ΔH0+ΔHD、累積高度差)を算出する。そして、制御部35は、上述した式(4)を用いて、現在の傾斜度(傾斜角θ)を算出する。
なお、制御部35は、算出した現在の傾斜角θを、新たな初期傾斜度(傾斜角初期値θ0)として、記憶部34に記憶させる。
次に、制御部35は、計測を継続するか否かを判定する(ステップS207)。制御部35は、計測を継続する場合(ステップS207:Y)、処理をステップS205に戻す。また、制御部35は、計測を継続しない場合(ステップS207:N)、処理を終了する。
以上説明したように、本実施形態による傾斜情報計測装置1は、少なくとも二つの変動センサ51、52と、傾斜変動情報生成部42と、静止傾斜センサ32と、静止判定部33と、制御部35(傾斜情報検出部)とを備えている。
そして、少なくとも二つの気圧変動センサ51、52は気圧の変動を検出し、所定の距離を離して配置されている。また、一方の気圧変動センサ52は、他方の気圧変動センサ51の周波数特性とほぼ一致するよう、調整されている。傾斜変動情報生成部42は、少なくとも二つの気圧変動センサ51、52によって検出された気圧の変動を示す気圧変動情報(例えば、検出信号)に基づいて、計測対象物の傾斜角の変動に関する情報を示す傾斜変動情報を生成する。
静止傾斜センサ32は、計測対象物が静止状態における計測対象物の傾斜情報を、静止傾斜情報として検出する。静止判定部33は、計測対象物が静止しているか否かを判定する。そして、制御部35は、静止判定部33によって計測対象物が静止していると判定された場合に静止傾斜センサ32によって検出された静止傾斜情報(静止傾斜角θs)と、傾斜変動情報生成部42によって生成された傾斜変動情報とに基づいて、測定対象物の傾斜情報(傾斜角θ)を検出する。
これにより、本実施形態による傾斜情報計測装置1は、計測対象物が静止している状態における静止傾斜センサ32から取得した静止傾斜情報(静止傾斜角θs)と、高精度に検出可能な気圧変動センサ51、52を利用して生成された傾斜変動情報とに基づいて計測対象物の傾斜情報(傾斜角θ)を計測するため、傾斜情報の検出精度を向上させることができる。
例えば、気圧変動センサ51、52を利用して計測対象物の傾斜情報(傾斜角θ)を検出するため、本実施形態による傾斜情報計測装置1は、計測対象物が加速運動している場合であっても、高精度に傾斜情報を計測することができる。さらに、ほぼ同一の出力特性を有する気圧変動センサ51、52を用いるため、双方の高度に対する検出信号の差分を傾斜と誤認することなく、高精度に傾斜情報を計測することもできる。
また、例えば、絶対圧センサ(気圧センサ)では、高度の検出精度は、数cm程度である。そのため、絶対圧センサを使用した従来技術では、絶対圧センサを例えば1m話して配置して傾斜を計測したとしても、数度程度の計測程度となる。
これに対して、本実施体系による傾斜情報計測装置1は、1ミリメートル程度の高度差を検出可能であるため、数から十数cmの間隔に、気圧変動センサ51、52を配置すれば、絶対圧センサを使用した従来技術よりも高精度な計測精度を実現できる上、傾斜情報計測装置1のサイズを大幅に縮小することができる。
また、本実施形態による傾斜情報計測装置1は、計測対象物の傾斜情報の初期値を記憶する記憶部34を備えている。制御部35は、静止判定部33によって計測対象物が静止していると判定された場合に、静止傾斜情報(静止傾斜角θs)を初期値(傾斜角初期値θ0)として記憶部34に記憶させる。
そして、制御部35は、記憶部34が記憶する初期値(傾斜角初期値θ0)と、傾斜変動情報とに基づいて、計測対象物の傾斜情報(傾斜角θ)を検出するとともに、検出した当該計測対象物の傾斜情報を初期値(傾斜角初期値θ0)として記憶部34に記憶させる。
これにより、初期値(傾斜角初期値θ0)を記憶部34に記憶させて毎回更新することで、本実施形態による傾斜情報計測装置1は、静止判定部33による静止状態の判定と、静止傾斜センサ32による静止傾斜情報(静止傾斜角θs)の取得とを、計測の度に毎回実行する必要がない。よって、本実施形態による傾斜情報計測装置1は、計測対象物が加速運動している場合であっても、測定不可能な期間を低減しつつ、高精度に傾斜情報を計測することができる。
また、本実施形態では、傾斜変動情報生成部42は、少なくとも二つの気圧変動情報に、基づいて、少なくとも二つの気圧変動センサの高度差の変動を示す高度変動情報(ΔHD)を、傾斜変動情報として生成する。制御部35は、静止傾斜情報と、所定の距離(距離D)を示す距離情報と、高度変動情報(ΔHD)とに基づいて、計測対象物の傾斜情報(傾斜角θ)を検出する。
これにより、本実施形態による傾斜情報計測装置1は、例えば、式(3)と式(4)に基づいて、簡易な演算により、高精度に傾斜情報を算出することができる。また、本実施形態による傾斜情報計測装置1は、積分による演算処理を必要としないため、誤差の蓄積がなく、傾斜情報(傾斜角θ)の検出精度を向上させることができる。
また、本実施形態では、静止判定部33は、計測対象物の測位情報を取得する測位システム(例えば、GPSシステム)によって取得された測位情報の変化に基づいて、計測対象物が静止しているか否かを判定する。また、計測対象物は移動可能であり、移動速度を取得速度検出機構によって取得された移動速度に基づいて、計測対象物が静止しているか否かを判定してもよい。また、計測対象物は車輪の駆動によって移動可能な移動体であり、静止判定部33は、車輪の駆動状態に基づいて、計測対象物が静止しているか否かを判定してもよい。
このように、計測対象物が備えている機構を利用して、計測対象物が静止しているか否かを判定することで、本実施形態による傾斜情報計測装置1は、自装置で計測対象物が静止していることを検出する手段を備える必要がなく、自装置の構成を簡略化することができる。
また、本実施形態では、気圧変動センサ51、52は、空気が流入するキャビティ10を有するキャビティ筐体3(センサ本体)と、カンチレバー4と、気圧変動検出部5とを備えている。カンチレバー4は、空気をキャビティ10の内外に流通させるギャップ13(連通孔)を除くキャビティ10の開口面を塞ぐように基端部4aから先端部4bに向けて一方向に延びる板状であり、キャビティ10の内部と外部との圧力差に応じて撓み変形する。気圧変動検出部5は、カンチレバー4の撓み変形に応じた気圧変動情報を検出する。
これにより、本実施形態による傾斜情報計測装置1は、カンチレバー4の撓み変形に応じた抵抗値変化に基づいて、圧力変化(高度変化)をより正確に検出することができるため、傾斜情報の検出精度を向上させることができる。なお、半導体プロセス技術によりカンチレバー4を形成できるので、本実施形態による傾斜情報計測装置1では、カンチレバー4を非常に薄型化(例えば数から数百nm厚)することができる。よって、本実施形態による傾斜情報計測装置1では、微小な圧力変動の検出を精度よく行うことができる。
つまり、計測対象物の傾斜情報を精度よく検出可能な傾斜情報計測装置および気圧変動センサの調整方法を提供することが可能になる。
(変形例1)
本変形例では、カンチレバーの厚さ方向の変形に対して、可動電極を厚さ方向の位置を調整する構成および方法について、説明する。
例えば製造工程等においてカンチレバー4が厚さ方向に変形した場合について、図21を用いて説明する。差圧ΔPがゼロの場合、カンチレバー4は変形しているため、ギャップ13が設計値よりも広がった状態になる(図21(a)参照)。ここで、Pout>Pinの差圧が発生すると、ギャップは徐々に狭くなり、可動電極とカンチレバー先端部が最も近接し、そこから徐々に広がることとなる(図21(b)参照)。逆方向の差圧の場合は、ギャップは広がる方向にのみ変化する(図21(c)参照)ことから、同じ差圧でもその方向によって、キャビティを移動する空気流量が異なることとなる。このため、差圧の方向で気圧変動センサの感度が異なってしまい、カンチレバーが変形していない気圧変動センサと感度を一致させることができなくなる。
このため、気圧変動センサ52の可動電極64の位置制御を利用して、カンチレバーの厚さ方向の変形による感度差を抑制する構成は、図6に示す気圧変動センサ52と同じである。可動電極部64の厚さ方向の位置決め構成を図22を用いて説明する。
製造時で変形したカンチレバー4の変形量に応じて、可動電極64を厚さ方向に移動する。厚さ方向の移動は第三電圧可変直流電源75cを用いる。
可動電極部64と第三固定電極部63とに接続された第三電圧可変直流電源75cは、可動電極部64と第三固定電極部63との間に静電力を発生させる。可動電極部64が第三固定電極部63との間に発生する力と、可動電極部を支持する板ばね部65の剛性とにより可動電極部64を厚さ方向に位置決めする。このときの可動電極部64の厚さ方向の位置は、カンチレバー4先端部4bの厚さ方向の位置に合わせて維持する。
これにより、差圧ΔPの方向が異なっていても、差圧ΔPの絶対値が大きくなるほどギャップ13が広がることになり、差圧ΔPの方向による感度差を解消することができる。
以上により、カンチレバーの変形があっても差圧方向による感度差が発生せず、気圧変動センサ51と52の感度を一致させることができる。これにより、計測対象物の傾斜情報を精度よく検出可能な傾斜情報計測装置および気圧変動センサの調整方法を提供することが可能になる。
(変形例2)
本変形例では、カンチレバーの厚さ方向の変形とギャップ幅のばらつき両方に対応して、可動電極を2方向での位置を調整する方法について、説明する。なお、構造は、前述の第1実施形態の気圧変動センサ52と同様の構造である。
前述の第1実施形態および変形例1に示したように、製造時にギャップの幅の仕上がり寸法にはばらつきがあり、カンチレバーの剛性が低いため、設計形状から変形して製造されてしまうことがある。この両方による影響を排除して、2つの気圧変動センサを同じ特性に調整して維持する必要がある。そこで、可動電極64の位置決めを第一〜第三電圧可変直流電源75a、75b、75cを用いて、カンチレバー4の変形を予め測定するなどして把握したギャップ幅を設計値に変更することができる。
可動電極64でギャップの幅を制御するときは、図8に示すように、第一及び第二電圧可変直流電源75a、75bを用い、カンチレバー4の厚さ方向の変形に対応する時は、図22に示すように、第三電圧可変直流電源75cを用いて、ギャップ幅を設計値に変更、維持する。これにより、可動電極64は2方向に位置決めすることができ、カンチレバーの厚さ方向の変形とギャップ幅のばらつきによる感度差を解消することができる。
以上により、カンチレバーの変形とギャップ幅のばらつき両方があっても、これによる感度差が発生せず、気圧変動センサ51と52の感度を一致させることができる。これにより、計測対象物の傾斜情報を精度よく検出可能な傾斜情報計測装置および気圧変動センサの調整方法を提供することが可能になる。
(第2実施形態)
次に、第2実施形態に係る傾斜情報計測装置1について説明する。
なお、本実施形態による傾斜情報計測装置1は、出力特性調整機構を有する気圧変動センサ52を二つで傾斜変動センサ40を構成し、気圧変動センサ52のギャップ可動部6に圧電アクチュエータを用いる。なお、本実施形態による傾斜情報計測装置1と同様の構成については、ここでは説明を省略する。
本実施形態の気圧変動センサ52の構成について、図17を用いて説明する。
図17(a)は、本実施形態における気圧変動センサ52の一例を示す平面図であり、図17(b)は、図6に示すA−A線に沿った気圧変動センサ52の断面図である。
図17に示すように、気圧変動センサ52は、第一実施形態の気圧変動センサ52同様の構成であるカンチレバー4と、蓋部12と、気圧変動検出部5と、キャビティ筐体3と、出力特性調整機構とを備えている。出力特性調整機構は、ギャップ形成部6と、ギャップ制御部7とを有している。
本実施形態におけるギャップ形成部6は、例えば、圧電アクチュエータであって、圧電薄膜67と、圧電薄膜67の対向する側面に設けられた1対の電極部67a、67bとを有している。
圧電薄膜67は、SOI基板2の酸化層2b上に設けられた電極67bの上面に設けられており、さらに圧電薄膜67の上面に電極部67aが設けられている。圧電薄膜67の先端部67cとカンチレバー4の先端部4bとの間にギャップ13を形成している。
圧電薄膜67は、電極部67a、67bとの電位差により発生する逆圧電効果によって伸縮し、先端部67cをカンチレバー4の先端部4bに対して接近/離間する方向に変位可能である。
ギャップ制御部7は、前述の第1実施形態同様、所定値記憶部71と、比較回路72と、処理回路73と、駆動回路74と、駆動回路74から出力される信号(駆動出力)に応じて通電が制御される電圧可変直流電源75aとを有する。
駆動回路74は、処理回路73から出力された指令値に応じてギャップ形成部6を作動させるための信号(駆動出力)を出力する。より詳細には、電圧可変直流電源75aからギャップ形成部6への通電を指示する信号によって、圧電薄膜67の変位を制御する。
以上の構成により、上述の第1実施形態同様、ギャップ13の寸法を任意に制御することが可能となる。
次に、二つの気圧変動センサ52で傾斜変動センサ40を構成するための、気圧変動センサ52の出力特性調整方法について、図18を用いて詳細に説明する。
図18は、本実施形態における二つの気圧変動センサ52の出力特性を近似させる調整方法の一例を示すフローチャートである。
上述の第1実施形態同様、外気圧の変動から遮断され、密閉された調整装置に二つの気圧変動センサ52を内蔵し、接続されたポンプの動作によって調整装置内部の気圧を変動させる構成を用いる。
本実施形態では、二つの気圧変動センサ52は、双方で出力調整を行うことができるため、まず、調整目標値を設定する必要がある。
まず、気圧変動センサ52各々のギャップ制御部7を駆動し、ギャップ13幅を最小に設定する(ステップS401)。次に、調整装置に接続されたポンプを駆動し、ポンプを駆動させるポンプ駆動信号の周波数を徐々に低減する(ステップS402)。
次いで、ポンプ駆動信号と気圧変動センサ52の出力信号との位相差を比較し、少なくとも一方の気圧変動センサ52の出力信号との位相差が所定値以下であるか判定する(ステップS403)。
ポンプ駆動信号の周波数低下を停止し、ポンプ駆動信号との位相差が所定値以下になった気圧変動センサ52を判別する(ステップS404)。
ポンプ駆動信号との他方の気圧変動センサ52の出力信号との位相差が所定範囲内か判定する(ステップS405)。位相差が所定範囲外である場合(ステップS405:N)、処理をステップS406に進める。
ポンプ駆動信号との位相差が所定値以上の、他方の気圧変動センサ52の出力特性調整機構を駆動し、ギャップ13を徐々に広くするよう制御する(ステップS406)。ここでは他方の気圧変動センサ52の方がギャップ13の幅が狭いので、ギャップ形成部6及びギャップ制御部7を用いて徐々に広げていく制御を行い、処理をステップS405に戻す。
ポンプ駆動信号と他方の気圧変動センサ52の出力信号との位相差が所定範囲内である場合(ステップS405:Y)、処理をステップS407に進める。
次に、二つの気圧変動センサ52の出力信号の振幅値を比較し、振幅値の小さい気圧変動センサ52の検出回路22の増幅率を変更し、振幅値の大きい気圧変動センサ52の振幅値に近づける(ステップS407)。
次に、二つの気圧変動センサ52の出力信号の差分を測定、所定範囲内か判定を行い(ステップS408)、所定範囲内であれば、処理を終了し、出力特性調整機構内の所定値記憶部71に最終的に記憶されたギャップ設定情報(ギャップ幅、増幅率等)を維持する。所定範囲外であれば(ステップS408:N)、エラー表示などのエラー処理を行う(ステップS409)。
以上の調整手法により、二つの気圧変動センサ52の出力特性を近似させることができるため、調整した二つの気圧変動センサ52で傾斜情報計測装置1を構成すると、同じ高度変化に対して同じ出力信号を得ることができる。このため、二つの気圧変動センサが検出した高度変化量から高精度に傾斜度を計測することが可能となる。
つまり、計測対象物の傾斜情報を精度よく検出可能な傾斜情報計測装置および気圧変動センサの調整方法を提供することが可能になる。
(変形例3)
本変形例では、別途設定した目標値に対して、気圧変動センサ52の出力特性を調整する方法について説明する。
まず、傾斜変動センサ40の設計仕様(例えば、傾斜変動に対する出力値、周波数特性等)から、気圧変動センサ52の出力特性(例えば、高度変化に対する出力値、周波数特性等)を求める。
次に、ポンプ接続された調整装置内に、複数の気圧変動センサ52を設置する。
次いで、気圧変動センサ52の周波数特性から、下限周波数(例えば、高帯域の振幅値から振幅値が3dB低下した周波数)でポンプを駆動する。
この時のポンプ駆動信号と気圧変動センサ52の出力信号との位相差が所定範囲内(一例として、ポンプ駆動信号に対して気圧変動センサ52の出力信号との位相差が45度±1度の範囲)になるよう各出力特性調整機構を駆動する。
位相差が所定範囲内に設定した後に、気圧変動センサ52の振幅値が所定値となるよう各検出回路22の増幅率を設定する。
このようにすると、複数の気圧変動センサ52の出力特性を特定の目標値に近似するよう設定することが可能となる。このため、調整作業後の気圧変動センサ52どれを選択しても、個別の気圧変動センサ52の出力特性差を誤認することない、高精度の傾斜変動センサ40を構成することができる。
また、三つの気圧変動センサ52で2軸の傾斜を測定できる傾斜変動センサ40を構成する場合にも、出力特性の近似した気圧変動センサ52三つを容易に用意することができる。このように多軸の傾斜を計測するような傾斜変動センサ40を構成する場合には、上述の調整方法を用いて、出力特性の近似した気圧変動センサ52を多数用意することが可能となる。
(第3実施形態)
次に、第3実施形態に係る傾斜情報計測装置1に用いる気圧変動センサ52について説明する。
本実施形態による気圧変動センサ52は、出力特性調整機構にカンチレバー破損防止機構を有する。気圧変動センサ52は、出力特性調整機構によりギャップ13幅を可変することで、気圧変動センサ52の出力特性(周波数特性)を制御することができる。しかし、ギャップ13幅を調整する際、カンチレバー4に対し可動電極等を近接させるため、カンチレバー4と接触することでカンチレバー4を破損する危険性がある。
このため、出力特性調整機構にカンチレバー破損防止機構を付加し、出力特性調整時に気圧変動センサ52を破壊することを防止することとする。
本実施形態の気圧変動センサ52の構成について、一例をあげて説明する。本実施形態の気圧変動センサ52の構成は、上述の第1実施形態の気圧変動センサ52とほぼ同一であり、出力特性調整機構に静電アクチュエータを有する。
図19は本実施形態における気圧変動センサ52の一例を示す断面図である。
上述の第1実施形態の気圧変動センサ52と異なる点は、カンチレバー4と可動電極64と接続された接触検知部80で構成されたカンチレバー破損防止機構を有する点である。
接触検知部80は、例えば、電圧計からなり、接続された可変電圧直流電源75a、75b、75cで電圧が加わる可動電極64と、可動電極64と電気的に切断されているカンチレバー4との電圧を計測する。可動電極64とカンチレバー4とが接触すると、可動電極64とカンチレバー4との間に電流が流れ、電圧がゼロとなる。これを利用して、可動電極64とカンチレバー4との接触を検知し、可動電極64の変位によりカンチレバー4の破損を防止することができ、気圧変動センサ52を破壊することなく出力特性を調整することが可能となる。
さらに、ギャップ形成部6を構成するアクチュエータの可変範囲を広くすることで、ギャップ形成部6を容易かつ安価に製造することができる。
このように本実施形態によれば、計測対象物の傾斜情報を精度よく検出可能な傾斜情報計測装置および気圧変動センサの調整方法を提供することが可能になる。
(第4実施形態)
次に、第4実施形態に係る傾斜情報計測装置1に用いる気圧変動センサ52について説明する。なお、本実施形態による気圧変動センサ52は、カンチレバーを用いず、キャビティとキャビティ外部との差圧を計測する構成である。
図20を参照して、本実施形態における気圧変動センサ52の詳細な構成について説明する。図20は、本実施形態における気圧変動センサ52の断面図である。
本実施形態における気圧変動センサ52は、キャビティ筐体3と、キャビティ筐体3内部と外部とを連通する連通孔413と、連通孔413内壁に設けられた流量センサ404と、連通孔413に設置された出力特性調整機構とを有している。
流量センサ404は、一対の温度センサ424a、424bと、双方の温度センサとの間かつ等距離に設置されたヒーター414とを有する。流量センサ404を通過して流れる流体により、ヒーター414からの温度分布は、流体の下流方向に広がる。
このため、上流側と下流側の温度センサ424の温度情報の差により、流体の流量を計測することが可能となる。この時の流れはキャビティ内外の差圧によって生じるため、流量を測定することで、前述のカンチレバーを用いた気圧変動センサ同様、外部の圧力変動を測定することができる。
出力特性調整機構は、連通孔413の一部を形成するギャップ形成部6と、ギャップ形成部の変位を制御するギャップ制御部7とから構成される。
ギャップ形成部6は、一例をあげると、連通孔413を構成する壁面の一部を変形させる電磁アクチュエータである。電磁アクチュエータは、接続されたギャップ制御部7からの制御信号に基づいて、連通孔413を構成する壁面の一部を凹凸に変形させる。これにより、キャビティ10とキャビティ筐体3外部との間を移動する圧力伝達媒体の流量を制御することができる。
これにより、キャビティ外の圧力である外圧Poutに対して、キャビティ10内の内圧Pinがどれだけ遅れて変化するかを制御することができる。このため、前述のカンチレバーで構成した気圧変動センサ同様、流量センサを用いて構成する気圧変動センサ52の出力特性(周波数特性)を制御することが可能となる。
このように、本実施形態によれば、計測対象物の傾斜情報を精度よく検出可能な傾斜情報計測装置および気圧変動センサの調整方法を提供することが可能になる。
(第5実施形態)
次に、第5実施形態に係る傾斜情報計測装置1に用いる気圧変動センサ52について説明する。
本実施形態による気圧変動センサ52は、出力特性調整機構に2方向に移動可能なアクチュエータを用いて構成する。
前述までの気圧変動センサ52は、出力特性調整機構によりギャップ13の幅寸法を可変して制御することができる。しかし、カンチレバーの形状や厚さがわずかに異なった場合、カンチレバー全体の剛性に誤差を生じることとなる。つまり、同じ差圧が加わってもカンチレバー先端の位置が異なることとなる。
このため、出力特性調整機構の可動方向を2方向にし、カンチレバーの変位に応じて動的にギャップ幅を制御し、他方の気圧変動センサ51の出力特性と一致させることとする。
本実施形態の気圧変動センサ52の構成について、一例をあげて説明する。
図23は、本実施形態の気圧変動センサ52の一例を示す断面図である。なお、平面図は、図17(a)と同等であり、前述の第2実施形態と同様の構成については、ここでは説明を省略する。
図23に示すように、気圧変動センサ52のギャップ形成部は、圧電薄膜67と、積層型圧電素子68とを有している。
圧電薄膜67は、前述同様、表裏の電位差により伸縮し、先端部67cをカンチレバー4の先端部4bに対して接近/離間する方向に変位する。
積層型圧電素子68は、一端は筐体開口壁面11に固定され、他端は圧電薄膜67のキャビティ10側表面に接して配置される。積層型圧電素子68も電位差を与えると伸縮し、圧電薄膜67を押し上げ/引き下げする方向に変位する。
ギャップ制御部7は、前述の第1実施形態同様、所定値記憶部71と、比較回路72と、処理回路73と、駆動回路74と、電圧可変直流電源とを有する。
本実施形態において、電圧可変電流電源は、第一および第二の電圧可変直流電源75a、75cを有する。第一の電圧可変直流電源75aは圧電薄膜67に、第二の電圧可変直流電源75cは積層型圧電素子68に接続されている。
駆動回路74は、処理回路73から出力された指令値に応じてギャップ形成部6を作動させるための信号(駆動出力)を出力する。この時の指令値は、カンチレバー4の変位に応じた出力値となる。
より詳細には、電圧可変直流電源75aからギャップ形成部6への通電を指示する信号によって、圧電薄膜67の変位を図中X方向に制御する。また、電圧可変直流電源75cからギャップ形成部6への通電を指示する信号によって積層型圧電素子68の変位を図中Z方向に制御する。
したがって、製造工程等におけるカンチレバー4の寸法精度のずれにより発生する剛性低下が発生しても、カンチレバー4の変位を検知して、ギャップ形成部6先端を2方向に変位させ、ギャップ13の寸法を任意に制御することが可能となる。
なお、この構成は、圧電素子を利用した構成に限らない。例えば、ギャップ形成部6を前述の第1の実施形態で述べた静電型アクチュエータを利用しても2方向の変位が可能である。電圧可変直流電源75a、75bの通電でカンチレバー4の長手方向、電圧可変直流電源75cの通電で厚さ方向に、可動電極部を移動することができる。また、同様に、電磁アクチュエータ等でも実施可能である。
なお、圧力伝達媒体として空気の一例を示したが、重力加速度が加わる環境での他種のガス(例えば、窒素ガス、アルゴンガス等)や、液体(例えば、水、機械油やシリコーンオイル等)でも動作可能である。
以上の構成により、上述の実施形態同様、ギャップ13の寸法をカンチレバーの変位に応じて任意に制御することが可能となる。
なお、本発明の技術範囲は、上述した実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲において、上述した実施形態に種々の変更を加えたものを含む。すなわち、上述した実施形態で挙げた構成等はほんの一例に過ぎず、適宜変更が可能である。また、上述した各実施形態を適宜組み合わせて採用することも可能である。