JP2017144529A - 電動装置 - Google Patents
電動装置 Download PDFInfo
- Publication number
- JP2017144529A JP2017144529A JP2016029441A JP2016029441A JP2017144529A JP 2017144529 A JP2017144529 A JP 2017144529A JP 2016029441 A JP2016029441 A JP 2016029441A JP 2016029441 A JP2016029441 A JP 2016029441A JP 2017144529 A JP2017144529 A JP 2017144529A
- Authority
- JP
- Japan
- Prior art keywords
- arm
- power
- linear actuator
- power receiving
- power transmission
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Programme-controlled manipulators characterised by positioning means for manipulator elements electric
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/02—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/04—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type by rotating at least one arm, excluding the head movement itself, e.g. cylindrical coordinate type or polar coordinate type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/02—Arms extensible
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0004—Braking devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0008—Balancing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0025—Means for supplying energy to the end effector
- B25J19/0045—Contactless power transmission, e.g. by magnetic induction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Programme-controlled manipulators characterised by positioning means for manipulator elements electric
- B25J9/123—Linear actuators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1664—Programme controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/10—Circuit arrangements or systems for wireless supply or distribution of electric power using inductive coupling
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/06—Means for converting reciprocating motion into rotary motion or vice versa
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Computer Networks & Wireless Communication (AREA)
- Manipulator (AREA)
- Support Of Aerials (AREA)
Abstract
Description
第1の方向に延びた第1のアームと、
前記第1のアームに支持された第2のアームと、
前記第1のアームまたは前記第2のアームに設けられ、前記第2のアームを前記第1のアームに対して前記第1の方向に移動させるリニアアクチュエータと、
前記第1の方向と異なる第2の方向に延び、前記第1のアームを支持する支持体と、
前記第2の方向に平行な回転軸の周りに前記支持体を回転させる回転機構と、
を備え、
前記第1のアームは、送電アンテナを有し、
前記第2のアームは、受電アンテナを有し、
前記送電アンテナは、前記受電アンテナへ非接触で電力を供給し、
前記受電アンテナは、前記受電アンテナに電気的に接続された負荷へ前記供給された電力を供給し、
前記支持体を回転させるとき、
まず、前記リニアアクチュエータが、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構が、前記支持体を回転させる。
支持体と、
前記支持体に支持され、回転軸の周りに回転する回転機構と、
第1の方向に延び、前記回転機構に連結され、前記回転軸の周りに回転する第1のア−ムと、
前記第1のアームに支持された第2のアームと、
前記第1のアームまたは前記第2のアームに設けられ、前記第2のアームを前記第1のアームに対して前記第1の方向に移動させるリニアアクチュエータと、
を備え、
前記第1のアームは、送電アンテナを有し、
前記第2のアームは、受電アンテナを有し、
前記送電アンテナは、前記受電アンテナへ非接触で電力を供給し、
前記受電アンテナは、前記受電アンテナに電気的に接続された負荷へ前記供給された電力を供給し、
前記第1のアームを回転させるとき、
まず、前記リニアアクチュエータが、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構が、前記第1のアームを回転させる。
本開示の実施形態を説明する前に、本開示の基礎となった知見を説明する。
第1の方向に延びた第1のア−ムと、
前記第1のアームに支持された第2のアームと、
前記第1のアームまたは前記第2のアームに設けられ、前記第2のアームを前記第1のアームに対して前記第1の方向に移動させる第1のリニアアクチュエータと、
を備え、
前記第1のアームは、第1の送電アンテナを有し、
前記第2のアームは、第1の受電アンテナを有し、
前記第1の送電アンテナは、前記第1の受電アンテナへ非接触で電力を供給し、
前記第1の受電アンテナは、前記第1の受電アンテナに電気的に接続された負荷へ、前記供給された電力を供給する。
前記第1のアームは、第1の送電アンテナを有し、
前記第2のアームは、第1の受電アンテナを有し、
前記第1の送電アンテナは、前記第1の受電アンテナへ非接触で電力を供給し、
前記第1の受電アンテナは、前記第1の受電アンテナに電気的に接続された負荷へ、前記供給された電力を供給する。
第1の方向に延びたアームと、
前記第1の方向と異なる第2の方向に延び、前記アームを支持する支持体と、
前記支持体および前記アームの少なくとも一方に設けられ、前記アームを前記第2の方向に移動させるリニアアクチュエータと、
を備え、
前記支持体は、送電アンテナを有し、
前記アームは、受電アンテナを有し、
前記送電アンテナは、前記受電アンテナへ非接触で電力を供給し、
前記受電アンテナは、前記受電アンテナに電気的に接続された負荷へ、前記供給された電力を供給する。
前記支持体は、送電アンテナを有し、
前記アームは、受電アンテナを有し、
前記送電アンテナは、前記受電アンテナへ非接触で電力を供給し、
前記受電アンテナは、前記受電アンテナに電気的に接続された負荷へ、前記供給された電力を供給する。
第1の方向に延びた第1のアームと、
前記第1のアームに支持された第2のアームと、
前記第1のアームまたは前記第2のアームに設けられ、前記第2のアームを前記第1のアームに対して前記第1の方向に移動させるリニアアクチュエータと、
前記第1の方向と異なる第2の方向に延び、前記第1のアームを支持する支持体と、
前記第2の方向に平行な回転軸の周りに前記支持体を回転させる回転機構と、
を備え、
前記第1のアームは、送電アンテナを有し、
前記第2のアームは、受電アンテナを有し、
前記送電アンテナは、前記受電アンテナへ非接触で電力を供給し、
前記受電アンテナは、前記受電アンテナに電気的に接続された負荷へ前記供給された電力を供給し、
前記支持体を回転させるとき、
まず、前記リニアアクチュエータが、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構が、前記支持体を回転させる。
前記第1のアームは、送電アンテナを有し、
前記第2のアームは、受電アンテナを有し、
前記送電アンテナは、前記受電アンテナへ非接触で電力を供給し、
前記受電アンテナは、前記受電アンテナに電気的に接続された負荷へ前記供給された電力を供給する。
前記支持体を回転させるとき、
まず、前記リニアアクチュエータが、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構が、前記支持体を回転させる。
支持体と、
前記支持体に支持され、回転軸の周りに回転する回転機構と、
第1の方向に延び、前記回転機構に連結され、前記回転軸の周りに回転する第1のア−ムと、
前記第1のアームに支持された第2のアームと、
前記第1のアームまたは前記第2のアームに設けられ、前記第2のアームを前記第1のアームに対して前記第1の方向に移動させるリニアアクチュエータと、
を備え、
前記第1のアームは、送電アンテナを有し、
前記第2のアームは、受電アンテナを有し、
前記送電アンテナは、前記受電アンテナへ非接触で電力を供給し、
前記受電アンテナは、前記受電アンテナに電気的に接続された負荷へ前記供給された電力を供給し、
前記第1のアームを回転させるとき、
まず、前記リニアアクチュエータが、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構が、前記第1のアームを回転させる。
前記第1のアームは、送電アンテナを有し、
前記第2のアームは、受電アンテナを有し、
前記送電アンテナは、前記受電アンテナへ非接触で電力を供給し、
前記受電アンテナは、前記受電アンテナに電気的に接続された負荷へ前記供給された電力を供給する。
前記第1のアームを回転させるとき、
まず、前記リニアアクチュエータが、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構が、前記第1のアームを回転させる。
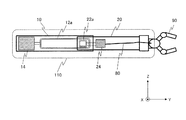
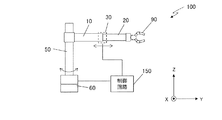
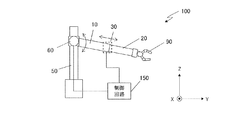
図4は、本開示の実施形態1における電動装置100の構成を模式的に示す図である。電動装置100は、例えば工場内で物品の運搬に使用されるロボットハンド装置である。
図16は、本開示の実施形態2における電動装置100の構成を示す図である。本実施形態の電動装置100は、アームを伸縮させる機構の代わりに、アーム10を支持体50が延びる方向に沿って移動させる機構を備えている点で、実施形態1とは異なる。
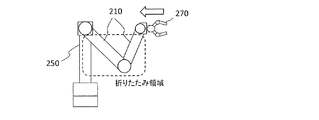
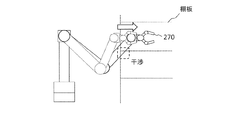
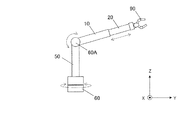
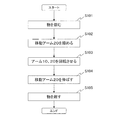
次に、本開示の実施形態3を説明する。本実施形態の電動装置は、実施形態1と同様、アームを支持体に対して回転させる回転機構と、アームを伸縮させる直動機構とを備えている。本実施形態においては、アームの先端のエンドエフェクタを回転移動させる際に、まずアームを縮めてから、回転移動を行う。これにより、回転に必要なトルクを低減し、消費電力を抑えることができる。
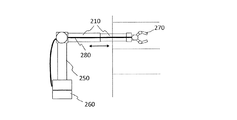
図27は、本開示の実施形態4における電動装置100の構成を模式的に示す図である。この電動装置100は、回転機構60が支持体50の根元ではなく、支持体50と第1のアーム10との連結部に設けられている点で、実施形態3の電動装置とは異なっている。本実施形態における電動装置100は、支持体50と、支持体50に支持され、回転軸の周りに回転する回転機構60と、第1の方向に延び、回転機構60に連結され、上記回転軸の周りに回転する第1のア−ム10と、第1のアーム10に支持された第2のアーム20と、第1のアーム10または第2のアーム20に設けられ、第2のアーム20を第1のアーム10に対して第1の方向に移動させるリニアアクチュエータ30とを備えている。各構成要素の構造は、実施形態3におけるものと同じである。
第1の方向に延びた第1のア−ムと、
前記第1のアームに支持された第2のアームと、
前記第1のアームまたは前記第2のアームに設けられ、前記第2のアームを前記第1のアームに対して前記第1の方向に移動させる第1のリニアアクチュエータと、
を備え、
前記第1のアームは、第1の送電アンテナを有し、
前記第2のアームは、第1の受電アンテナを有し、
前記第1の送電アンテナは、前記第1の受電アンテナへ非接触で電力を供給し、
前記第1の受電アンテナは、前記第1の受電アンテナに電気的に接続された負荷へ、前記供給された電力を供給する、
電動装置。
前記第1の送電アンテナは、第1の送電コイルを含み、
前記第1の受電アンテナは、第1の受電コイルを含み、
前記第1の送電コイルは、前記第1の受電コイルに電磁的に結合して前記第1の受電コイルに非接触で前記電力を供給する、
項目1に記載の電動装置。
前記第1の送電コイルは、前記第1の送電コイルの外周で囲まれる第1の送電面を有し、
前記第1の受電コイルは、前記第1の受電コイルの外周で囲まれる第1の受電面を有し、
前記第1の送電面および前記第1の受電面は、前記第2のアームに加わる荷重の方向に平行である、
項目2に記載の電動装置。
前記第1の方向と異なる第2の方向に延び、前記第1のアームを支持する支持体をさらに備えた、
項目1から3のいずれか1項に記載の電動装置。
前記支持体または前記第1のアームに設けられ、前記第1のアームを前記第2の方向に移動させる第2のリニアアクチュエータをさらに備え、
前記支持体は、第2の送電アンテナを有し、
前記第1のアームは、第2の受電アンテナをさらに有し、
前記第2の送電アンテナは、前記第2の受電アンテナへ非接触で電力を供給する、
項目4に記載の電動装置。
前記第2の送電アンテナは、第2の送電コイルを含み、
前記第2の受電アンテナは、第2の受電コイルを含み、
前記第2の送電コイルは、前記第2の受電コイルに電磁的に結合して前記第2の受電コイルに非接触で電力を供給する、
項目5に記載の電動装置。
前記第2の送電コイルは、前記第2の送電コイルの外周で囲まれる第2の送電面を有し、
前記第2の受電コイルは、前記第2の受電コイルの外周で囲まれる第2の受電面を有し、
前記第2の送電面および前記第2の受電面は、前記第1のアームに加わる荷重の方向に平行である、
項目6に記載の電動装置。
前記第1のアームが前記第1のリニアアクチュエータを有し、
前記第1のアームは、
前記第2の受電アンテナと前記第1のリニアアクチュエータとの間に接続された第1の整流回路と、
前記第1の整流回路と前記第1の送電アンテナとの間に接続された第1のインバータ回路と、
をさらに有し、
前記第2のアームは、前記第1の受電アンテナと前記負荷との間に接続された第2の整流回路をさらに有する、
項目5から7のいずれか1項に記載の電動装置。
前記第2のアームが前記第1のリニアアクチュエータを有し、
前記第2のアームは、前記第1の受電アンテナと前記第1のリニアアクチュエータとの間、かつ前記第1の受電アンテナと前記負荷との間に接続された整流回路をさらに有する、
項目5から7のいずれか1項に記載の電動装置。
前記第2の方向に平行な軸の周りに前記支持体を回転させる第1の回転機構をさらに有する、項目5から9のいずれか1項に記載の電動装置。
前記支持体に支持され、前記第1のアームを、前記第2の方向に平行な軸、および前記第1および第2の方向の両方に垂直な軸の少なくとも一方の軸の周りに回転させる第2の回転機構をさらに備える、項目5から10のいずれか1項に記載の電動装置。
第2のアームの先端に配置されたエンドエフェクタをさらに備え、
前記負荷は、前記エンドエフェクタである、項目1から11のいずれか1項に記載の電動装置。
第1の方向に延びたアームと、
前記第1の方向と異なる第2の方向に延び、前記アームを支持する支持体と、
前記支持体および前記アームの少なくとも一方に設けられ、前記アームを前記第2の方向に移動させるリニアアクチュエータと、
を備え、
前記支持体は、送電アンテナを有し、
前記アームは、受電アンテナを有し、
前記送電アンテナは、前記受電アンテナへ非接触で電力を供給し、
前記受電アンテナは、前記受電アンテナに電気的に接続された負荷へ、前記供給された電力を供給する、
電動装置。
前記送電アンテナは、送電コイルを含み、
前記受電アンテナは、受電コイルを含み、
前記送電コイルは、前記受電コイルに電磁的に結合して前記受電コイルに非接触で電力を供給する、
項目13に記載の電動装置。
前記送電コイルは、前記送電コイルの外周で囲まれる送電面を有し、
前記受電コイルは、前記受電コイルの外周で囲まれる受電面を有し、
前記送電面および前記受電面は、前記アームに加わる荷重の方向に平行である、
項目14に記載の電動装置。
前記支持体は、前記送電アンテナに接続されたインバータ回路をさらに有し、
前記アームは、前記受電アンテナと前記負荷との間に接続された整流回路をさらに有する、
項目13から15のいずれか1項に記載の電動装置。
前記第2の方向に平行な軸の周りに前記支持体を回転させる第1の回転機構をさらに備える、
項目13から16のいずれか1項に記載の電動装置。
前記支持体に支持され、前記アームを、前記第2の方向に平行な軸、および前記第1および第2の方向の両方に垂直な軸の少なくとも一方の軸の周りに回転させる第2の回転機構をさらに有する、項目13から17のいずれか1項に記載の電動装置。
前記アームの先端に配置されたエンドエフェクタをさらに備え、
前記負荷は、前記エンドエフェクタである、項目13から18のいずれか1項に記載の電動装置。
第1の方向に延びた第1のアームと、
前記第1のアームに支持された第2のアームと、
前記第1のアームまたは前記第2のアームに設けられ、前記第2のアームを前記第1のアームに対して前記第1の方向に移動させるリニアアクチュエータと、
前記第1の方向と異なる第2の方向に延び、前記第1のアームを支持する支持体と、
前記第2の方向に平行な回転軸の周りに前記支持体を回転させる回転機構と、
を備え、
前記第1のアームは、送電アンテナを有し、
前記第2のアームは、受電アンテナを有し、
前記送電アンテナは、前記受電アンテナへ非接触で電力を供給し、
前記受電アンテナは、前記受電アンテナに電気的に接続された負荷へ前記供給された電力を供給し、
前記支持体を回転させるとき、
まず、前記リニアアクチュエータが、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構が、前記支持体を回転させる、
電動装置。
前記支持体を回転させるとき、
まず、前記リニアアクチュエータが、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構が、前記支持体を回転させ、
その後、前記リニアアクチュエータが、前記第2のアームの前記重心を前記回転軸から遠ざける、
項目20に記載の電動装置。
前記リニアアクチュエータおよび前記回転機構を制御する制御回路をさらに備え、
前記支持体を回転させるとき、
前記制御回路は、
まず、前記リニアアクチュエータを制御して、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構を制御して、前記支持体を回転させる、
項目20または21に記載の電動装置。
前記支持体を回転させるとき、
前記制御回路は、
まず、前記リニアアクチュエータを制御して、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構を制御して、前記支持体を回転させ、
その後、前記リニアアクチュエータを制御して、前記第2のアームの前記重心を前記回転軸から遠ざける、
項目22に記載の電動装置。
前記回転機構は、モータを有し、前記モータの回転によって前記支持体を回転させる、項目20から23のいずれか1項に記載の電動装置。
支持体と、
前記支持体に支持され、回転軸の周りに回転する回転機構と、
第1の方向に延び、前記回転機構に連結され、前記回転軸の周りに回転する第1のア−ムと、
前記第1のアームに支持された第2のアームと、
前記第1のアームまたは前記第2のアームに設けられ、前記第2のアームを前記第1のアームに対して前記第1の方向に移動させるリニアアクチュエータと、
を備え、
前記第1のアームは、送電アンテナを有し、
前記第2のアームは、受電アンテナを有し、
前記送電アンテナは、前記受電アンテナへ非接触で電力を供給し、
前記受電アンテナは、前記受電アンテナに電気的に接続された負荷へ前記供給された電力を供給し、
前記第1のアームを回転させるとき、
まず、前記リニアアクチュエータが、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構が、前記第1のアームを回転させる、
電動装置。
前記第1のアームを回転させるとき、
まず、前記リニアアクチュエータが、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構が、前記第1のアームを回転させ、
その後、前記リニアアクチュエータが、前記第2のアームの前記重心を前記回転軸から遠ざける、
項目25に記載の電動装置。
前記リニアアクチュエータおよび前記回転機構を制御する制御回路をさらに備え、
前記第1のアームを回転させるとき、
前記制御回路は、
まず、前記リニアアクチュエータを制御して、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構を制御して、前記第1のアームを回転させる、
項目25または26に記載の電動装置。
前記第1のアームを回転させるとき、
前記制御回路は、
まず、前記リニアアクチュエータを制御して、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構を制御して、前記第1のアームを回転させ、
その後、前記リニアアクチュエータを制御して、前記第2のアームの前記重心を前記回転軸から遠ざける、
項目27に記載の電動装置。
前記回転機構は、モータを有し、前記モータの回転によって前記第2のアームを回転させる、項目25から28のいずれか1項に記載の電動装置。
前記送電アンテナは、送電コイルを含み、
前記受電アンテナは、受電コイルを含み、
前記送電コイルは、前記受電コイルに電磁的に結合して前記受電コイルに非接触で電力を供給する、
項目20から29のいずれか1項に記載の電動装置。
前記送電コイルは、前記送電コイルの外周で囲まれる送電面を有し、
前記受電コイルは、前記受電コイルの外周で囲まれる受電面を有し、
前記送電面および前記受電面は、前記第2のアームに加わる荷重の方向に平行である、
項目30に記載の電動装置。
前記第1のアームは、前記送電アンテナに接続されたインバータ回路をさらに有し、
前記第2のアームは、前記受電アンテナと前記負荷との間に接続された整流回路をさらに有する、
項目20から31のいずれか1項に記載の電動装置。
第2のアームの先端に配置されたエンドエフェクタをさらに備え、
前記負荷は、前記エンドエフェクタである、項目20から32のいずれか1項に記載の電動装置。
送電アンテナを有し、第1の方向に延びた第1のアームと、
受電アンテナを有し、前記第1のアームに支持された第2のアームと、
前記第1のアームまたは前記第2のアームに設けられ、前記第2のアームを前記第1のアームに対して前記第1の方向に移動させるリニアアクチュエータと、
前記第1の方向と異なる第2の方向に延び、前記第1のアームを支持する支持体と、
前記第2の方向に平行な回転軸の周りに前記支持体を回転させる回転機構と、
を備え、
前記送電アンテナが前記受電アンテナへ非接触で電力を供給し、
前記受電アンテナが前記受電アンテナに電気的に接続された負荷へ前記供給された電力を供給する、
電動装置の制御方法であって、
前記支持体を回転させるとき、
まず、前記リニアアクチュエータを制御して、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構を制御して、前記支持体を回転させる、
電動装置の制御方法。
支持体と、
前記支持体に支持され、回転軸の周りに回転する回転機構と、
第1の方向に延び、前記回転機構に連結され、前記回転軸の周りに回転する第1のア−ムと、
前記第1のアームに支持された第2のアームと、
前記第1のアームまたは前記第2のアームに設けられ、前記第2のアームを前記第1のアームに対して前記第1の方向に移動させるリニアアクチュエータと、
を備え、
前記第1のアームは、送電アンテナを有し、
前記第2のアームは、受電アンテナを有し、
前記送電アンテナは、前記受電アンテナへ非接触で電力を供給し、
前記受電アンテナは、前記受電アンテナに電気的に接続された負荷へ前記供給された電力を供給する、
電動装置の制御方法であって、
前記第1のアームを回転させるとき、
まず、前記リニアアクチュエータを制御して、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構を制御して、前記第1のアームを回転させる、
電動装置の制御方法。
前記支持体を回転させた後、前記リニアアクチュエータを制御して、前記第2のアームの前記重心を前記回転軸から遠ざける、項目34または35に記載の電動装置の制御方法。
10 第1のアーム(固定アーム)
12 第1の送電アンテナ
12a 第1の送電コイル
13 第2の受電アンテナ
13a 第2の送電コイル
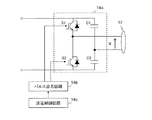
14 送電回路
14a インバータ回路
14b 送電制御回路
14c 送電側受信器
16 受電回路
16a 整流回路
16b 受電制御回路
16c 受電側送信器
20 第2のアーム(移動アーム)
22 第1の受電アンテナ
22a 第1の受電コイル
24 受電回路
24a 整流回路
24b 受電制御回路
24c 受電側送信器
30 第1のリニアアクチュエータ
32 モータ
34 ボールねじ
40 第2のリニアアクチュエータ
50 支持体
52 第2の送電アンテナ
52a 第2の送電コイル
54 送電回路
60、60A,60B、60C 回転機構
80 ケーブル
90 エンドエフェクタ(負荷)
100 電動装置
110 伸縮アーム
120 直動アーム
150 制御回路
210 アーム
230 関節
250 支持体
260 回転機構
270 ハンド(エンドエフェクタ)
280 ケーブル
Claims (17)
- 第1の方向に延びた第1のアームと、
前記第1のアームに支持された第2のアームと、
前記第1のアームまたは前記第2のアームに設けられ、前記第2のアームを前記第1のアームに対して前記第1の方向に移動させるリニアアクチュエータと、
前記第1の方向と異なる第2の方向に延び、前記第1のアームを支持する支持体と、
前記第2の方向に平行な回転軸の周りに前記支持体を回転させる回転機構と、
を備え、
前記第1のアームは、送電アンテナを有し、
前記第2のアームは、受電アンテナを有し、
前記送電アンテナは、前記受電アンテナへ非接触で電力を供給し、
前記受電アンテナは、前記受電アンテナに電気的に接続された負荷へ前記供給された電力を供給し、
前記支持体を回転させるとき、
まず、前記リニアアクチュエータが、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構が、前記支持体を回転させる、
電動装置。 - 前記支持体を回転させるとき、
まず、前記リニアアクチュエータが、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構が、前記支持体を回転させ、
その後、前記リニアアクチュエータが、前記第2のアームの前記重心を前記回転軸から遠ざける、
請求項1に記載の電動装置。 - 前記リニアアクチュエータおよび前記回転機構を制御する制御回路をさらに備え、
前記支持体を回転させるとき、
前記制御回路は、
まず、前記リニアアクチュエータを制御して、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構を制御して、前記支持体を回転させる、
請求項1または2に記載の電動装置。 - 前記支持体を回転させるとき、
前記制御回路は、
まず、前記リニアアクチュエータを制御して、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構を制御して、前記支持体を回転させ、
その後、前記リニアアクチュエータを制御して、前記第2のアームの前記重心を前記回転軸から遠ざける、
請求項3に記載の電動装置。 - 前記回転機構は、モータを有し、前記モータの回転によって前記支持体を回転させる、請求項1から4のいずれか1項に記載の電動装置。
- 支持体と、
前記支持体に支持され、回転軸の周りに回転する回転機構と、
第1の方向に延び、前記回転機構に連結され、前記回転軸の周りに回転する第1のア−ムと、
前記第1のアームに支持された第2のアームと、
前記第1のアームまたは前記第2のアームに設けられ、前記第2のアームを前記第1のアームに対して前記第1の方向に移動させるリニアアクチュエータと、
を備え、
前記第1のアームは、送電アンテナを有し、
前記第2のアームは、受電アンテナを有し、
前記送電アンテナは、前記受電アンテナへ非接触で電力を供給し、
前記受電アンテナは、前記受電アンテナに電気的に接続された負荷へ前記供給された電力を供給し、
前記第1のアームを回転させるとき、
まず、前記リニアアクチュエータが、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構が、前記第1のアームを回転させる、
電動装置。 - 前記第1のアームを回転させるとき、
まず、前記リニアアクチュエータが、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構が、前記第1のアームを回転させ、
その後、前記リニアアクチュエータが、前記第2のアームの前記重心を前記回転軸から遠ざける、
請求項6に記載の電動装置。 - 前記リニアアクチュエータおよび前記回転機構を制御する制御回路をさらに備え、
前記第1のアームを回転させるとき、
前記制御回路は、
まず、前記リニアアクチュエータを制御して、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構を制御して、前記第1のアームを回転させる、
請求項6または7に記載の電動装置。 - 前記第1のアームを回転させるとき、
前記制御回路は、
まず、前記リニアアクチュエータを制御して、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構を制御して、前記第1のアームを回転させ、
その後、前記リニアアクチュエータを制御して、前記第2のアームの前記重心を前記回転軸から遠ざける、
請求項8に記載の電動装置。 - 前記回転機構は、モータを有し、前記モータの回転によって前記第2のアームを回転させる、請求項6から9のいずれか1項に記載の電動装置。
- 前記送電アンテナは、送電コイルを含み、
前記受電アンテナは、受電コイルを含み、
前記送電コイルは、前記受電コイルに電磁的に結合して前記受電コイルに非接触で電力を供給する、
請求項1から10のいずれか1項に記載の電動装置。 - 前記送電コイルは、前記送電コイルの外周で囲まれる送電面を有し、
前記受電コイルは、前記受電コイルの外周で囲まれる受電面を有し、
前記送電面および前記受電面は、前記第2のアームに加わる荷重の方向に平行である、
請求項11に記載の電動装置。 - 前記第1のアームは、前記送電アンテナに接続されたインバータ回路をさらに有し、
前記第2のアームは、前記受電アンテナと前記負荷との間に接続された整流回路をさらに有する、
請求項1から12のいずれか1項に記載の電動装置。 - 第2のアームの先端に配置されたエンドエフェクタをさらに備え、
前記負荷は、前記エンドエフェクタである、請求項1から13のいずれか1項に記載の電動装置。 - 送電アンテナを有し、第1の方向に延びた第1のアームと、
受電アンテナを有し、前記第1のアームに支持された第2のアームと、
前記第1のアームまたは前記第2のアームに設けられ、前記第2のアームを前記第1のアームに対して前記第1の方向に移動させるリニアアクチュエータと、
前記第1の方向と異なる第2の方向に延び、前記第1のアームを支持する支持体と、
前記第2の方向に平行な回転軸の周りに前記支持体を回転させる回転機構と、
を備え、
前記送電アンテナが前記受電アンテナへ非接触で電力を供給し、
前記受電アンテナが前記受電アンテナに電気的に接続された負荷へ前記供給された電力を供給する、
電動装置の制御方法であって、
前記支持体を回転させるとき、
まず、前記リニアアクチュエータを制御して、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構を制御して、前記支持体を回転させる、
電動装置の制御方法。 - 支持体と、
前記支持体に支持され、回転軸の周りに回転する回転機構と、
第1の方向に延び、前記回転機構に連結され、前記回転軸の周りに回転する第1のア−ムと、
前記第1のアームに支持された第2のアームと、
前記第1のアームまたは前記第2のアームに設けられ、前記第2のアームを前記第1のアームに対して前記第1の方向に移動させるリニアアクチュエータと、
を備え、
前記第1のアームは、送電アンテナを有し、
前記第2のアームは、受電アンテナを有し、
前記送電アンテナは、前記受電アンテナへ非接触で電力を供給し、
前記受電アンテナは、前記受電アンテナに電気的に接続された負荷へ前記供給された電力を供給する、
電動装置の制御方法であって、
前記第1のアームを回転させるとき、
まず、前記リニアアクチュエータを制御して、前記第2のアームの重心を前記回転軸に近づけ、
その後、前記回転機構を制御して、前記第1のアームを回転させる、
電動装置の制御方法。 - 前記支持体を回転させた後、前記リニアアクチュエータを制御して、前記第2のアームの前記重心を前記回転軸から遠ざける、請求項15または16に記載の電動装置の制御方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016029441A JP6868841B2 (ja) | 2016-02-19 | 2016-02-19 | 電動装置 |
| CN201611012278.6A CN107097222B (zh) | 2016-02-19 | 2016-11-17 | 电动装置 |
| US15/397,914 US10919160B2 (en) | 2016-02-19 | 2017-01-04 | Electrodynamic apparatus |
| EP17150919.3A EP3208051B1 (en) | 2016-02-19 | 2017-01-11 | Electrodynamic apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016029441A JP6868841B2 (ja) | 2016-02-19 | 2016-02-19 | 電動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017144529A true JP2017144529A (ja) | 2017-08-24 |
| JP6868841B2 JP6868841B2 (ja) | 2021-05-12 |
Family
ID=57799558
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016029441A Active JP6868841B2 (ja) | 2016-02-19 | 2016-02-19 | 電動装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10919160B2 (ja) |
| EP (1) | EP3208051B1 (ja) |
| JP (1) | JP6868841B2 (ja) |
| CN (1) | CN107097222B (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20190240831A1 (en) * | 2018-02-05 | 2019-08-08 | Kimball Electronics Indiana, Inc. | Robot Having Vertically Oriented Articulated Arm Motion |
| KR20200135195A (ko) * | 2019-05-23 | 2020-12-02 | 캐논 가부시끼가이샤 | 제어 시스템 및 제어 방법 |
| FR3140787A1 (fr) * | 2023-05-03 | 2024-04-19 | Aisprid | Robot avec un bras articulé pour l’agriculture |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6488632B2 (ja) * | 2014-10-22 | 2019-03-27 | セイコーエプソン株式会社 | ロボット |
| CN108533177B (zh) * | 2018-05-31 | 2024-04-09 | 温州大学 | 便携式凿岩碎石设备的电液激振系统 |
| TWI691152B (zh) * | 2018-09-27 | 2020-04-11 | 台達電子工業股份有限公司 | 機器人系統 |
| CN110957931B (zh) | 2018-09-27 | 2020-11-27 | 台达电子工业股份有限公司 | 机器人系统 |
| US11518043B2 (en) * | 2018-12-20 | 2022-12-06 | Canon Kabushiki Kaisha | Communication apparatus, communication method, robot apparatus, production apparatus, method of manufacturing article, transmission apparatus, recording medium |
| JP2020142362A (ja) | 2019-02-28 | 2020-09-10 | キヤノン株式会社 | ロボット装置、ロボット装置の制御方法、ロボット装置を用いた物品の製造方法、通信装置、通信方法、制御プログラム及び記録媒体 |
| DE102019202897A1 (de) * | 2019-03-04 | 2020-09-10 | Festo Se & Co. Kg | Antriebssystem |
| CN111002287B (zh) * | 2019-12-26 | 2021-11-30 | 北京海益同展信息科技有限公司 | 机器人、图像采集方法、电子设备及计算机可读存储介质 |
| DE102021101027A1 (de) * | 2021-01-19 | 2022-07-21 | Dürr Systems Ag | Beschichtungseinrichtung, insbesondere Lackierroboter |
| CN113146679B (zh) * | 2021-04-20 | 2022-06-03 | 哈尔滨工业大学 | 一种不完全约束快速对接机构 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS52133660A (en) * | 1976-05-01 | 1977-11-09 | Fuji Electric Co Ltd | Industrial robot |
| JPS57201189A (en) * | 1981-05-11 | 1982-12-09 | Rob Con Ltd | Shifter for workpiece |
| JPH02218578A (ja) * | 1989-02-17 | 1990-08-31 | Tokiko Eng Kk | ワーク移送装置 |
| JPH07100786A (ja) * | 1993-10-01 | 1995-04-18 | Yaskawa Electric Corp | 無配線ロボット |
| JP2014187777A (ja) * | 2013-03-22 | 2014-10-02 | Nippon Soken Inc | 直動ロボットの無線給電装置 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003117877A (ja) * | 2001-10-17 | 2003-04-23 | Japan Servo Co Ltd | 多関節型の産業用ロボット |
| WO2007075844A1 (en) * | 2005-12-20 | 2007-07-05 | Intuitive Surgical, Inc. | Telescoping insertion axis of a robotic surgical system |
| DE102006049956A1 (de) * | 2006-10-19 | 2008-04-24 | Abb Ag | System und Verfahren zur automatisierten Ver- und/oder Bearbeitung von Werkstücken |
| FR2935630B1 (fr) * | 2008-09-10 | 2011-09-02 | Innovations Tech S I T Soc D | Dispositif a teleoperation formant bras motorise |
| EP3544196B1 (en) * | 2008-09-27 | 2023-09-13 | WiTricity Corporation | Wireless energy transfer systems |
| WO2011046227A2 (en) * | 2009-10-14 | 2011-04-21 | Panasonic Corporation | Electric machine and power supply system having battery pack |
| JP5641891B2 (ja) * | 2009-11-13 | 2014-12-17 | パナソニック株式会社 | 車両用充給電システム |
| JP5909714B2 (ja) * | 2009-11-13 | 2016-04-27 | パナソニックIpマネジメント株式会社 | 車両用充給電システム |
| WO2011122003A1 (ja) * | 2010-03-30 | 2011-10-06 | パナソニック株式会社 | 無線電力伝送システム |
| JP5750583B2 (ja) * | 2010-04-07 | 2015-07-22 | パナソニックIpマネジメント株式会社 | 無線電力伝送システム |
| US8917511B2 (en) * | 2010-06-30 | 2014-12-23 | Panasonic Corporation | Wireless power transfer system and power transmitting/receiving device with heat dissipation structure |
| US8970070B2 (en) * | 2010-07-02 | 2015-03-03 | Panasonic Intellectual Property Management Co., Ltd. | Wireless power transmission system |
| CN103659791B (zh) | 2012-09-26 | 2016-03-02 | 电装波动株式会社 | 无线供电装置及具备该装置的直驱型系统 |
| JP6351244B2 (ja) | 2013-11-29 | 2018-07-04 | キヤノン株式会社 | アーム機構 |
| US9692238B2 (en) * | 2014-02-18 | 2017-06-27 | Panasonic Corporation | Wireless power transmission system and power transmitting device |
| AU2015311561A1 (en) * | 2014-09-05 | 2017-03-23 | Solace Power Inc. | Wireless electric field power transfer system, method, transmitter and receiver therefor |
| US10216151B2 (en) * | 2015-06-23 | 2019-02-26 | Mitsubishi Electric Corporation | Power consumption-amount estimation apparatus |
-
2016
- 2016-02-19 JP JP2016029441A patent/JP6868841B2/ja active Active
- 2016-11-17 CN CN201611012278.6A patent/CN107097222B/zh active Active
-
2017
- 2017-01-04 US US15/397,914 patent/US10919160B2/en active Active
- 2017-01-11 EP EP17150919.3A patent/EP3208051B1/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS52133660A (en) * | 1976-05-01 | 1977-11-09 | Fuji Electric Co Ltd | Industrial robot |
| JPS57201189A (en) * | 1981-05-11 | 1982-12-09 | Rob Con Ltd | Shifter for workpiece |
| JPH02218578A (ja) * | 1989-02-17 | 1990-08-31 | Tokiko Eng Kk | ワーク移送装置 |
| JPH07100786A (ja) * | 1993-10-01 | 1995-04-18 | Yaskawa Electric Corp | 無配線ロボット |
| JP2014187777A (ja) * | 2013-03-22 | 2014-10-02 | Nippon Soken Inc | 直動ロボットの無線給電装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20190240831A1 (en) * | 2018-02-05 | 2019-08-08 | Kimball Electronics Indiana, Inc. | Robot Having Vertically Oriented Articulated Arm Motion |
| KR20200135195A (ko) * | 2019-05-23 | 2020-12-02 | 캐논 가부시끼가이샤 | 제어 시스템 및 제어 방법 |
| KR102702452B1 (ko) * | 2019-05-23 | 2024-09-04 | 캐논 가부시끼가이샤 | 제어 시스템 및 제어 방법 |
| FR3140787A1 (fr) * | 2023-05-03 | 2024-04-19 | Aisprid | Robot avec un bras articulé pour l’agriculture |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107097222B (zh) | 2021-08-20 |
| EP3208051A3 (en) | 2017-12-13 |
| US20170239822A1 (en) | 2017-08-24 |
| JP6868841B2 (ja) | 2021-05-12 |
| EP3208051B1 (en) | 2021-07-21 |
| EP3208051A2 (en) | 2017-08-23 |
| CN107097222A (zh) | 2017-08-29 |
| US10919160B2 (en) | 2021-02-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6868841B2 (ja) | 電動装置 | |
| JP6692078B2 (ja) | 電動装置 | |
| TWI642570B (zh) | 輪內馬達系統 | |
| JP2018093706A (ja) | 無線給電ユニット、送電モジュール、受電モジュールおよび無線電力伝送システム | |
| JP6103061B2 (ja) | 給電装置及び非接触給電システム | |
| JP5800981B2 (ja) | 非接触給電装置 | |
| WO2013081045A1 (ja) | 非接触電力伝送装置及び方法 | |
| JP6487825B2 (ja) | 非接触電力伝送システム、および、送電装置 | |
| JP2017093182A (ja) | 非接触電力伝送システム | |
| US10118266B2 (en) | Transfer robot without a wire connection between fixed and moving parts | |
| CN109595259A (zh) | 衬底运输真空平台 | |
| Kikuchi et al. | Development of wireless power transfer system for robot arm with rotary and linear movement | |
| JP6820047B2 (ja) | 非接触電力伝送システム | |
| WO2014196239A1 (ja) | 給電装置、および非接触給電システム | |
| JP2013017254A (ja) | 電力伝送システム | |
| JP6773291B2 (ja) | 搬送ロボット | |
| EP3419144B1 (en) | Wireless power transmission system, power transmitting device, and power receiving device | |
| JP5849630B2 (ja) | 電力中継器 | |
| JPWO2018221532A1 (ja) | 送電装置、無線電力伝送システム、および制御装置 | |
| JP2018117404A (ja) | 無線給電装置の送電ユニット | |
| JP2017070178A (ja) | 無線電力伝送システム | |
| JP2018074380A (ja) | 無線電力伝送装置 | |
| Yazaki et al. | Moving coil type wireless linear motor based on magnetic resonance coupling | |
| Nakamura et al. | Preliminary development of an Energy Logistics as a new wireless power transmission method | |
| JP2019122172A (ja) | 非接触電力伝送装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181031 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191009 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191029 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191220 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200212 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200508 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20200508 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20200518 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20200526 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20200731 |
|
| C211 | Notice of termination of reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C211 Effective date: 20200804 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20201013 |
|
| C13 | Notice of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: C13 Effective date: 20201201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201203 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20210202 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20210323 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20210323 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210329 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6868841 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |