JP2017106751A - 物体検知装置、物体検知システム - Google Patents
物体検知装置、物体検知システム Download PDFInfo
- Publication number
- JP2017106751A JP2017106751A JP2015238776A JP2015238776A JP2017106751A JP 2017106751 A JP2017106751 A JP 2017106751A JP 2015238776 A JP2015238776 A JP 2015238776A JP 2015238776 A JP2015238776 A JP 2015238776A JP 2017106751 A JP2017106751 A JP 2017106751A
- Authority
- JP
- Japan
- Prior art keywords
- object detection
- current
- time
- upper limit
- communication
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/523—Details of pulse systems
- G01S7/524—Transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/02—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems using reflection of acoustic waves
- G01S15/04—Systems determining presence of a target
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/02—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems using reflection of acoustic waves
- G01S15/06—Systems determining the position data of a target
- G01S15/08—Systems for measuring distance only
-
- G—PHYSICS
- G08—SIGNALLING
- G08C—TRANSMISSION SYSTEMS FOR MEASURED VALUES, CONTROL OR SIMILAR SIGNALS
- G08C15/00—Arrangements characterised by the use of multiplexing for the transmission of a plurality of signals over a common path
- G08C15/06—Arrangements characterised by the use of multiplexing for the transmission of a plurality of signals over a common path successively, i.e. using time division
-
- G—PHYSICS
- G08—SIGNALLING
- G08C—TRANSMISSION SYSTEMS FOR MEASURED VALUES, CONTROL OR SIMILAR SIGNALS
- G08C19/00—Electric signal transmission systems
- G08C19/02—Electric signal transmission systems in which the signal transmitted is magnitude of current or voltage
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Acoustics & Sound (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
- Arrangements For Transmission Of Measured Signals (AREA)
Abstract
Description
本実施形態に係る物体検知装置は超音波センサであり、車両等の移動体に搭載されるものである。超音波センサは、超音波を移動体の周囲に送信し、周囲に存在する物体により反射された反射波を受信し、送信から受信までの時間を測定することにより、移動体と物体との距離を求める。
この受信待機を行ううえで、超音波センサ20の感度を漸増させる。この感度の漸増は時刻t16において結果の送信が終了した後も継続され、時刻t17において感度が所定の閾値以上となり、高感度状態とされる。この高感度状態は、受信した反射波の波高値に対する閾値、すなわち検出される電圧の値に対する閾値を下げ、波高値が小さい場合でも受信の検知を可能とする状態である。受信待機の時間が長くなるにつれ、検出される物体はより遠方に位置することとなる。このとき、探査波及び反射波の波高値は距離に応じて減衰するものであるため、超音波センサ20が反射波を受信した際の波高値がより小さいものとなる。このような大きく減衰した反射波を受信可能とすべく、高感度状態に設定するのである。
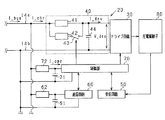
本実施形態では、電源回路40の構成が第1実施形態と一部異なっている。図6は、本実施形態における電源回路40の回路図である。電源回路40は、可変抵抗45と、ドライブ回路30との接続側に並列接続されたコンデンサ44を備えている。その他の構成は、第1実施形態と同様である。制御部70は、可変抵抗45に抵抗値の変更指令を送信する。具体的には、電源回路40からドライブ回路30への電力の供給後に、抵抗値を小さくする制御を行う。なお、他の処理は第1実施形態と同等であるため、説明を省略する。
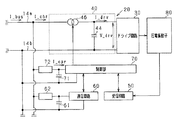
本実施形態では、電源回路40の構成が第1実施形態と一部異なっており、それに伴い、制御部70が行う処理も第1実施形態と一部異なっている。図7は、本実施形態における電源回路40の回路図である。電源回路40は、電流の上限値を可変に設定する電流制限回路46を備えている。この電流制限回路46は制御部70からの指令により、電流の上限値を設定するものである。電源回路40のドライブ回路30との接続側には、コンデンサ44が並列接続されている。その他の構成は、第1実施形態と同様である。
本実施形態では、電源回路40の構成が第3実施形態と一部異なっており、それに伴い制御部70が行う処理も第3実施形態と一部異なっている。図11は、本実施形態における電源回路40の回路図である。電源回路40は、電流の上限値を可変に設定する電流調整回路46aと、この電流調整回路46aに直列接続された第1抵抗41aを備えている。この第1抵抗41aには、第2抵抗42aとスイッチ43aとの直列接続体が並列接続されている。電流調整回路46aは制御部70からの指令により、電流の上限値を設定するものである。スイッチ43aの開閉状態は制御部70からの指令により切り替えられ、スイッチ43aをONとすることで、第1抵抗41aと第2抵抗42aとが並列接続状態となる。また、電源回路40のドライブ回路30との接続側には、コンデンサ44が並列接続されている。
・各実施形態において、ECU10と複数の超音波センサ20,20a,20bとにより物体検知システムを構成するものとしたが、ECU10とひとつの超音波センサ20とにより物体検知システムを構成してもよい。
Claims (10)
- 制御装置(10)と物体検知装置(20)が通信線(14)を介して接続され、前記通信線を介して電力の供給が行われ、且つ前記通信線を流れる電流に信号を重畳させて情報の伝達を行う物体検知システムに適用され、所定の制御周期で圧電振動子を駆動して探査波を送信し、物体により反射された反射波を受信する物体検知装置であって、
前記圧電振動子を駆動するドライブ回路(30)に並列接続されたコンデンサ(44)と、
前記ドライブ回路への電力供給の終了後の前記通信線の電流値を制御する電流制御部と、を備える物体検知装置。 - 前記電流制御部は、前記ドライブ回路への電力の供給が終了以降に、電力の供給時よりも前記電流値を大きくする、請求項1に記載の物体検知装置。
- 前記電流値には、前記制御装置との前記情報の伝達が可能な値である通信上限値が定められており、
前記電流制御部は、前記ドライブ回路への電力の供給が終了した以降に、前記電流値を前記通信上限値以下に設定する、請求項1に記載の物体検知装置。 - 前記探査波の送信後に、前記反射波を受信すべく所定期間待機するものであり、
前記電流制御部は、前記所定期間の経過後であり且つ次の制御周期前に、前記電流値を前記通信上限値よりも大きい値に設定する期間である充電期間を設ける、請求項3に記載の物体検知装置。 - 前記所定期間に前記制御装置との間で前記情報の伝達を行う、請求項4に記載の物体検知装置。
- 前記制御装置は、前記通信線を介して物体検知装置へ電力を供給する電源供給部(12)をさらに備え、
前記電源供給部には供給可能な電力の上限として供給上限値が定められており、
前記電流制御部は、前記供給上限値以下に前記電流値を設定する、請求項1〜5のいずれか1項に記載の物体検知装置。 - 前記電流制御部は、抵抗値が可変である抵抗(41、42、45)を備える、請求項1〜5のいずれか1項に記載の物体検知装置。
- 前記電流制御部は、前記電流値を可変にする電流制限回路(46)を備える、請求項1〜5のいずれか1項に記載の物体検知装置。
- 前記電流制御部は、前記電流制限回路に直列接続された、抵抗値が可変である抵抗(41a,42a)をさらに備える、請求項8に記載の物体検知装置。
- 請求項1〜9のいずれか1項に記載の複数の物体検知装置と、
前記制御装置と、
前記制御装置と前記複数の物体検知装置を通信可能に接続する前記通信線と、を備え、
前記複数の物体検知装置にてそれぞれ取得された前記情報を、前記ドライブ回路のへの電力の供給後から次の制御周期までの間に、前記通信線を介して送信する、物体検知システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015238776A JP2017106751A (ja) | 2015-12-07 | 2015-12-07 | 物体検知装置、物体検知システム |
| DE112016005597.8T DE112016005597B4 (de) | 2015-12-07 | 2016-11-30 | Objekterfassungsvorrichtung und Objekterfassungssystem |
| US15/781,589 US10495741B2 (en) | 2015-12-07 | 2016-11-30 | Object detection device and object detection system |
| PCT/JP2016/085476 WO2017098971A1 (ja) | 2015-12-07 | 2016-11-30 | 物体検知装置及び物体検知システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015238776A JP2017106751A (ja) | 2015-12-07 | 2015-12-07 | 物体検知装置、物体検知システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017106751A true JP2017106751A (ja) | 2017-06-15 |
| JP2017106751A5 JP2017106751A5 (ja) | 2018-03-22 |
Family
ID=59013128
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015238776A Pending JP2017106751A (ja) | 2015-12-07 | 2015-12-07 | 物体検知装置、物体検知システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10495741B2 (ja) |
| JP (1) | JP2017106751A (ja) |
| DE (1) | DE112016005597B4 (ja) |
| WO (1) | WO2017098971A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111164854A (zh) * | 2018-03-22 | 2020-05-15 | 麦克赛尔株式会社 | 非接触输电装置和非接触输电受电系统 |
| JP2023081204A (ja) * | 2021-11-30 | 2023-06-09 | 株式会社安川電機 | センサネットワークシステム、センサ電力供給装置、通信装置、センサ電力供給方法、通信方法 |
| WO2023218830A1 (ja) * | 2022-05-12 | 2023-11-16 | 株式会社デンソー | 通信制御装置、通信制御方法、および通信制御プログラム |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020054097A1 (ja) | 2018-09-14 | 2020-03-19 | アルプスアルパイン株式会社 | 情報収集システム及び情報収集端末 |
| KR102575723B1 (ko) * | 2018-11-08 | 2023-09-07 | 현대자동차주식회사 | 후방 경보 센서 조립체 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002143766A (ja) * | 2000-10-25 | 2002-05-21 | Ge Medical Systems Global Technology Co Llc | 超音波振動子駆動回路 |
| JP2006335203A (ja) * | 2005-06-01 | 2006-12-14 | Denso Corp | 車両用障害物検知装置 |
| JP2008299625A (ja) * | 2007-05-31 | 2008-12-11 | Nippon Ceramic Co Ltd | 超音波信号通信方法および超音波センサ装置 |
| JP2009067156A (ja) * | 2007-09-11 | 2009-04-02 | Denso Corp | 通信装置 |
| US20100245066A1 (en) * | 2007-10-23 | 2010-09-30 | Sarioglu Guner R | Automotive Ultrasonic Sensor System with Independent Wire Harness |
| WO2015064061A1 (ja) * | 2013-11-04 | 2015-05-07 | 株式会社デンソー | センサシステム、制御装置、及びセンサ |
| US20150175100A1 (en) * | 2012-07-04 | 2015-06-25 | Robert Bosch Gmbh | Increasing the availability of ultrasound-based driver assistance systems in the event of undervoltage in the vehicle |
Family Cites Families (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6820897B2 (en) * | 1992-05-05 | 2004-11-23 | Automotive Technologies International, Inc. | Vehicle object detection system and method |
| JPS6381288A (ja) | 1986-09-24 | 1988-04-12 | Yokogawa Electric Corp | 超音波レベル計 |
| US6922147B1 (en) * | 2001-07-12 | 2005-07-26 | Ann S. Viksnins | Warning system sensing child left behind in infant seat in vehicle |
| US6714132B2 (en) * | 2001-10-11 | 2004-03-30 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Self-activating system and method for alerting when an object or a person is left unattended |
| US6950054B1 (en) * | 2001-12-03 | 2005-09-27 | Cyterra Corporation | Handheld radar frequency scanner for concealed object detection |
| JP2004085363A (ja) * | 2002-08-27 | 2004-03-18 | Omron Corp | 侵入物体検出装置及びその設定装置、設定方法、並びにその設定確認方法 |
| DE102004024284A1 (de) * | 2003-07-17 | 2005-02-03 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Durchführung von Gefahrabwendungsmassnahmen für Lebewesen in Kraftfahrzeugen |
| US7720580B2 (en) * | 2004-12-23 | 2010-05-18 | Donnelly Corporation | Object detection system for vehicle |
| US7348880B2 (en) * | 2005-07-18 | 2008-03-25 | Delphi Technologies, Inc. | Occupant detection and temperature forewarn safety system and method |
| DE102008000570A1 (de) | 2008-03-07 | 2009-09-10 | Robert Bosch Gmbh | Ultraschallbasiertes Fahrerassistenzsystem |
| JP5300451B2 (ja) * | 2008-12-17 | 2013-09-25 | キヤノン株式会社 | 画像処理装置及び画像処理装置の制御方法 |
| JP5821179B2 (ja) * | 2010-12-08 | 2015-11-24 | トヨタ自動車株式会社 | 車両用情報伝達装置 |
| WO2013001941A1 (ja) * | 2011-06-27 | 2013-01-03 | 日本電気株式会社 | 物体検知装置、物体検知方法および物体検知プログラム |
| JP5821419B2 (ja) * | 2011-08-30 | 2015-11-24 | 富士通株式会社 | 移動物体検出装置、移動物体検出方法及び移動物体検出用コンピュータプログラム |
| US9068816B2 (en) * | 2011-11-22 | 2015-06-30 | Flextronics Automotive Inc. | Capacitor sensors and system and methods for non-contact object detection |
| JP5831193B2 (ja) * | 2011-12-13 | 2015-12-09 | 富士通株式会社 | 利用者検知装置、方法及びプログラム |
| JP5991224B2 (ja) * | 2013-02-15 | 2016-09-14 | オムロン株式会社 | 画像処理装置、画像処理方法、および画像処理プログラム |
| DE202013006676U1 (de) * | 2013-07-25 | 2014-10-28 | GM Global Technology Operations LLC (n. d. Ges. d. Staates Delaware) | System zur Warnung vor einer möglichen Kollision einesKraftfahrzeuges mit einem Objekt |
| WO2015140333A1 (en) * | 2014-03-21 | 2015-09-24 | Iee International Electronics & Engineering S.A. | Method and system for unattended child detection |
| JP6429360B2 (ja) * | 2014-04-25 | 2018-11-28 | 本田技研工業株式会社 | 物体検出装置 |
| JP6412399B2 (ja) * | 2014-10-22 | 2018-10-24 | 株式会社デンソー | 物体検知装置 |
| US9469176B2 (en) * | 2015-01-08 | 2016-10-18 | Delphi Technologies, Inc. | System and method to detect an unattended occupant in a vehicle and take safety countermeasures |
| US20160249815A1 (en) * | 2015-02-26 | 2016-09-01 | Safe Family Wearables, LLC. | Safety system |
| US9836069B1 (en) * | 2015-03-31 | 2017-12-05 | Google Inc. | Devices and methods for protecting unattended children in the home |
| US9777528B2 (en) * | 2015-07-29 | 2017-10-03 | Ford Global Technologies, Inc. | Object detection and method for vehicle door assist system |
| US20170036512A1 (en) * | 2015-08-04 | 2017-02-09 | Harold James (Jim) Willard, JR. | System to prevent harm to children, pets or others left in unattended vehicles in hot weather |
| CA2904745A1 (en) * | 2015-09-17 | 2017-03-17 | David Honey-Jones | Safety detection in sealed vehicle spaces |
| US20170088044A1 (en) * | 2015-09-25 | 2017-03-30 | Luther Hensley | Vehicle Occupant Safety System |
| US10115029B1 (en) * | 2015-10-13 | 2018-10-30 | Ambarella, Inc. | Automobile video camera for the detection of children, people or pets left in a vehicle |
| US10946716B2 (en) * | 2016-02-21 | 2021-03-16 | Eric Ireri | Vehicle temperature sensor systems |
| US20170282822A1 (en) * | 2016-04-03 | 2017-10-05 | Cecil Lee Hunter, Jr. | Child vehicular abandonment prevention system |
| US20180065504A1 (en) * | 2016-09-02 | 2018-03-08 | Atieva, Inc. | Vehicle Child Detection and Response System |
| JP6609229B2 (ja) * | 2016-09-02 | 2019-11-20 | 株式会社デンソー | 物体検知装置 |
| US20180281709A1 (en) * | 2017-04-03 | 2018-10-04 | Ignacio Mendez | Vehicle heat safeguard |
| US20180370431A1 (en) * | 2017-06-23 | 2018-12-27 | Aamp Of Florida, Inc. | Unattented occupant protection system (uops) safety system |
| US10102729B1 (en) * | 2017-07-11 | 2018-10-16 | Katrina C. Hill | Safety system and method to prevent unattended vehicular occupants |
-
2015
- 2015-12-07 JP JP2015238776A patent/JP2017106751A/ja active Pending
-
2016
- 2016-11-30 US US15/781,589 patent/US10495741B2/en active Active
- 2016-11-30 DE DE112016005597.8T patent/DE112016005597B4/de active Active
- 2016-11-30 WO PCT/JP2016/085476 patent/WO2017098971A1/ja active Application Filing
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002143766A (ja) * | 2000-10-25 | 2002-05-21 | Ge Medical Systems Global Technology Co Llc | 超音波振動子駆動回路 |
| JP2006335203A (ja) * | 2005-06-01 | 2006-12-14 | Denso Corp | 車両用障害物検知装置 |
| JP2008299625A (ja) * | 2007-05-31 | 2008-12-11 | Nippon Ceramic Co Ltd | 超音波信号通信方法および超音波センサ装置 |
| JP2009067156A (ja) * | 2007-09-11 | 2009-04-02 | Denso Corp | 通信装置 |
| US20100245066A1 (en) * | 2007-10-23 | 2010-09-30 | Sarioglu Guner R | Automotive Ultrasonic Sensor System with Independent Wire Harness |
| US20150175100A1 (en) * | 2012-07-04 | 2015-06-25 | Robert Bosch Gmbh | Increasing the availability of ultrasound-based driver assistance systems in the event of undervoltage in the vehicle |
| WO2015064061A1 (ja) * | 2013-11-04 | 2015-05-07 | 株式会社デンソー | センサシステム、制御装置、及びセンサ |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111164854A (zh) * | 2018-03-22 | 2020-05-15 | 麦克赛尔株式会社 | 非接触输电装置和非接触输电受电系统 |
| JP2023081204A (ja) * | 2021-11-30 | 2023-06-09 | 株式会社安川電機 | センサネットワークシステム、センサ電力供給装置、通信装置、センサ電力供給方法、通信方法 |
| JP7427644B2 (ja) | 2021-11-30 | 2024-02-05 | 株式会社安川電機 | センサネットワークシステム、センサ電力供給装置、センサ電力供給方法 |
| WO2023218830A1 (ja) * | 2022-05-12 | 2023-11-16 | 株式会社デンソー | 通信制御装置、通信制御方法、および通信制御プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017098971A1 (ja) | 2017-06-15 |
| US10495741B2 (en) | 2019-12-03 |
| DE112016005597B4 (de) | 2024-03-07 |
| US20190302248A1 (en) | 2019-10-03 |
| DE112016005597T5 (de) | 2018-10-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017106751A (ja) | 物体検知装置、物体検知システム | |
| JP7481777B2 (ja) | マルチコイルワイヤレス充電装置の表面からのデバイス除去の検出 | |
| CN205596311U (zh) | 用于声换能器的控制器及换能器控制器 | |
| CN102687038B (zh) | 障碍物检测装置 | |
| JP2021515513A (ja) | フリーポジション充電パッド | |
| JP4645382B2 (ja) | バッテリ状態検知装置、バッテリ状態検知方法 | |
| CN108700658B (zh) | 特别是用于距离测量的和/或作为车辆泊车辅助机构的超声测量系统 | |
| JP2018529305A5 (ja) | ||
| JP2022528288A (ja) | 適応型パッシブping | |
| CN104428175B (zh) | 在车辆中出现欠压时基于超声波的驾驶员辅助系统的可用性的提高 | |
| CN107110961A (zh) | 超声波传感器和猝发信号控制方法 | |
| CN108196122B (zh) | 一种波形相位识别方法、装置、系统、计算机和存储介质 | |
| WO2019012837A1 (ja) | 超音波式の物体検出装置 | |
| CN112019057A (zh) | Dcdc转换器控制装置以及dcdc转换器 | |
| JP2017198598A (ja) | 電荷回収装置および電源回収方法 | |
| JP5422744B2 (ja) | 超音波検知装置の校正処理装置及び校正処理方法並びに車載用障害物検知装置 | |
| CN106872983B (zh) | 一种测距方法、装置及系统 | |
| CN102684713B (zh) | 电磁探测仪的发射机及其发射方法 | |
| JP2017106751A5 (ja) | ||
| US11513203B2 (en) | Operating method and control unit for an ultrasound transceiver device, ultrasound transceiver device and working apparatus | |
| CN113267783A (zh) | 用于障碍物的超短范围检测的设备、系统和方法 | |
| CN114371642A (zh) | 设备控制方法、装置及存储介质 | |
| KR101907458B1 (ko) | 초음파 센서 장치 및 초음파 센서 장치 제어 방법 | |
| JP4891885B2 (ja) | 共振点追尾型駆動装置 | |
| CN116762363A (zh) | 声波产生装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20160929 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180206 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190205 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190730 |