JP2017102829A - 運転支援装置、プログラム - Google Patents
運転支援装置、プログラム Download PDFInfo
- Publication number
- JP2017102829A JP2017102829A JP2015237550A JP2015237550A JP2017102829A JP 2017102829 A JP2017102829 A JP 2017102829A JP 2015237550 A JP2015237550 A JP 2015237550A JP 2015237550 A JP2015237550 A JP 2015237550A JP 2017102829 A JP2017102829 A JP 2017102829A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- overtaking
- operation state
- alarm
- preceding vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/09623—Systems involving the acquisition of information from passive traffic signs by means mounted on the vehicle
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/09626—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages where the origin of the information is within the own vehicle, e.g. a local storage device, digital map
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
- G06V20/582—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads of traffic signs
Abstract
【課題】自車両が追越禁止区間において前方車両を追越しする際の状況に応じて警告の要否を適切に判断し、不要な警告を抑制する。
【解決手段】運転支援ECU16は、撮像装置11及び車両検知センサ12を用いて検出した前方車両について、特定の動作状態を認識する。運転支援ECU16は、現在地の道路が追越禁止区間に該当するときに自車両による追越動作を検知した場合、警報動作を実行する。ただし、認識された前方車両の動作状態が追越を許容する条件である所定の追越許容条件を満たす場合、自車両による追越動作を検知した場合であっても警報動作を実行しない。一方、前方車両の動作状態が追越許容条件を満たさない場合、自車両による追越動作を検知したときに警報動作を実行する。
【選択図】図1
【解決手段】運転支援ECU16は、撮像装置11及び車両検知センサ12を用いて検出した前方車両について、特定の動作状態を認識する。運転支援ECU16は、現在地の道路が追越禁止区間に該当するときに自車両による追越動作を検知した場合、警報動作を実行する。ただし、認識された前方車両の動作状態が追越を許容する条件である所定の追越許容条件を満たす場合、自車両による追越動作を検知した場合であっても警報動作を実行しない。一方、前方車両の動作状態が追越許容条件を満たさない場合、自車両による追越動作を検知したときに警報動作を実行する。
【選択図】図1
Description
本開示は、自車両が追越禁止区間において追越動作を検知した場合に運転者に対して警報を出力する運転支援装置に関する。
従来、追越しが法的に禁止された道路(以下、追越禁止区間という)を自車両が走行しているときに、自車両が前方車両に対して追越しを行う追越動作が検知された場合、運転者に対して警告を与える技術が知られている。なお、「追越し」とは、車両が同じ進路上にある前の車両に追付いた場合に、進路を変えてその追付いた車両の側方を通過して、当該車両の前に出る走行を指す。
例えば、特許文献1には、自車両が追越禁止区間において第1の車線から第2の車線に進路変更して対象車両を追抜き、対象車両の前方で第1の車線に進路変更した場合、危険動作と判定した評価を運転者に対してフィードバックする技術が記載されている。
従来技術では、例えば、停止車両、あるいは故障や路上での作業中等の理由により低速で走行中の車両に対して追越しを行う場合といった、客観的に見て止むを得ない状況において追越しをかけた場面であっても運転者に警告を与えてしまうことがある。このような場合、運転者に対して煩わしさを与えてしまうという問題がある。
本開示の目的は、自車両が追越禁止区間において前方車両を追越しする際の状況に応じて警告の要否を適切に判断することにより、不要な警告を抑制するための技術を提供することである。
本開示の一態様である運転支援装置は、追越禁止判定部(16,S100)と、車両検知部(16,S102)と、動作状態認識部(16,S104)と、追越動作を検知する追越検知部(16,S200,S202)と、警報制御部(16,S204,S206)とを備える。なお、この欄及び特許請求の範囲に記載した括弧内の符号は、一つの態様として後述する実施形態に記載の具体的手段との対応関係を示すものであって、本発明の技術的範囲を限定するものではない。
追越禁止判定部は、自車両の現在地に該当する道路が追越禁止区間に該当するか否かを判定するように構成されている。車両検知部は、自車両が走行している進路上の前方に存在する車両である前方車両を検知するように構成されている。動作状態認識部は、車両検知部により検知された前方車両の動作状態を認識するように構成されている。追越検知部は、車両検知部により検知された前方車両を自車両が追越すための動作である追越動作を検知するように構成されている。
警報制御部は、追越禁止判定部により現在地の道路が追越禁止区間に該当すると判定されている条件下において追越検知部により追越動作が検知された場合、自車両の運転者に対して警報を出力する動作である警報動作を実行するように構成されている。ただし、警報制御部は、動作状態認識部により認識された前方車両の動作状態が追越を許容する条件である所定の追越許容条件を満たす場合、警報動作を禁止するように構成されている。
このような構成によれば、前方車両の動作状態に基づいて、自車両の追越動作に対する警告動作の要否を的確に判断することができる。これによって、自車両が走行している進路上を通常の走行の態様とは異なる挙動を示す前方車両に対して追越しをかけたとき等に、警報を出さないように制御できるので、運転者に対する煩わしさを低減できる。
以下、本発明の実施形態を図面に基づいて説明する。なお、本発明は下記の実施形態に限定されるものではなく様々な態様にて実施することが可能である。
[運転支援装置の構成の説明]
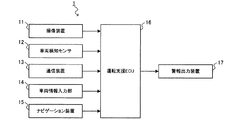
実施形態の運転支援システム1の構成について、図1を参照しながら説明する。この運転支援システム1は、車両(以下、自車両という)に搭載されるシステムである。図1に例示されるとおり、運転支援システム1は、撮像装置11と、車両検知センサ12と、通信装置13と、車両情報入力部14と、ナビゲーション装置15と、運転支援ECU16、警報出力装置17とを備える。運転支援システム1は、自車両が前方車両を追越す追越動作を検知したときに、追越許容条件の適否に応じて運転者に対して警報を出力する機能を有する。
[運転支援装置の構成の説明]
実施形態の運転支援システム1の構成について、図1を参照しながら説明する。この運転支援システム1は、車両(以下、自車両という)に搭載されるシステムである。図1に例示されるとおり、運転支援システム1は、撮像装置11と、車両検知センサ12と、通信装置13と、車両情報入力部14と、ナビゲーション装置15と、運転支援ECU16、警報出力装置17とを備える。運転支援システム1は、自車両が前方車両を追越す追越動作を検知したときに、追越許容条件の適否に応じて運転者に対して警報を出力する機能を有する。
撮像装置11は、自車両の前方に向けて設置された撮像装置である。この撮像装置11は、自車両の前方領域を撮像し、撮像された画像を表すデータを運転支援ECU16に出力する。車両検知センサ12は、自車両の前方の検出対象範囲に存在する対象物の有無や、自車両から対象物までの距離・方向を検知するための対物センサである。この車両検知センサ12は、例えば、超音波センサ、ミリ波レーダ、レーザレーダ等により具現化される。本実施形態では、撮像装置11及び車両検知センサ12を自車両の進路前方に存在する他車両(以下、前方車両という)を認識するためのセンサとして用いることを想定している。また、撮像装置11により撮像された画像を解析することにより、前方車両の動作状態を認識する用途を想定している。
通信装置13は、他の車両に搭載された通信装置と無線通信(すなわち、車車間通信)を行う無線通信装置である。運転支援ECU16は、通信装置13を通じて前方車両と車車間通信を行い、当該前方車両が提供する各種情報を取得する。本実施形態では、通信装置13により取得した情報を利用して、前方車両の動作状態を認識する用途を想定している。
車両情報入力部14は、自車両の状態を表す各種情報を運転支援ECU16に入力する。本実施形態では、自車両の状態を表す情報として、速さ(すなわち、車速)や加速度、角速度等の自車両の挙動を計測するセンサによる計測値や、運転者によるハンドル操作、アクセル操作、ブレーキ操作等の操作信号等を想定している。車両情報入力部14は、自車両の各機器において計測されたデータを運転支援ECU16に出力する。ナビゲーション装置15は、図示しないGPS(すなわち、Global Positioning System)受信機等を用いて検出された現在地と所与の道路地図データとに基づいて目的地までの経路案内を行う、周知のナビゲーションシステムの中核をなす電子制御装置である。
ナビゲーション装置15が経路案内に利用する道路地図データには、道路に対応するリンクや道路の分岐に対応するノードに関する情報が含まれる。また、道路のリンクに関する情報として、道路種別、道路幅員、車線数、制限速度や追越禁止等の法定規則、経路コスト等のデータが含まれる。本実施形態では、ナビゲーション装置15から、自車両の現在地を表す現在地情報や、規則によって追越しが禁止されている道路である追越禁止区間に関する道路情報を取得する用途を想定している。
運転支援ECU(すなわち、Electronic Control Unit)16は、図示しないCPU、RAM、ROM、フラッシュメモリ等の半導体メモリ、入出力インタフェース等を中心に構成された情報処理装置である。運転支援ECU16は、例えば、コンピュータシステムとしての機能が集約されたマイクロコントローラ等により具現化される。運転支援ECU16の機能は、CPUがROMや半導体メモリ等の非遷移的実体的記憶媒体に格納されたプログラムを実行することにより実現される。運転支援ECU16の機能を実現する手法はソフトウェアに限るものではなく、その一部又は全部の要素を論理回路やアナログ回路等を組合せたハードウェアを用いて実現してもよい。なお、運転支援ECU16を構成するマイクロコントローラの数は1つでも複数でもよい。運転支援ECU16は、上述のプログラムに従って、追越許容判定処理及び追越監視処理を実行する。これらの処理についての詳細な説明については後述する。
警報出力装置17は、運転者に対して警報を出力するための出力装置である。この警報出力装置17は、例えば、運転者に対して画像情報を表示するための表示装置や、運転者に対して音声により情報を提示する音声出力装置によって具現化される。本実施形態では、自車両が追越禁止区間において前方車両に対して追越動作をしたときに、運転者に対して警告を与える用途を想定している。
[追越許容判定処理の説明]
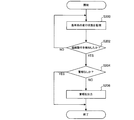
運転支援ECU16が実行する追越許容判定処理の手順について、図2のフローチャートを参照しながら説明する。この処理は、所定の制御周期ごとに繰返し実行される。
運転支援ECU16が実行する追越許容判定処理の手順について、図2のフローチャートを参照しながら説明する。この処理は、所定の制御周期ごとに繰返し実行される。
S100では、運転支援ECU16は、自車両の現在地に該当する道路が追越禁止区間であるか否かを判定する。具体的には、ナビゲーション装置15から取得した現在地情報及び道路情報に基づいて判断したり、撮像装置11により撮像された画像から道路のセンターラインを認識し、認識されたセンターラインの種類に基づいて判断することが考えられる。また、撮像装置11により撮像された画像に基づいて追越禁止の標識を認識して判断数ことが考えられる。
現在地に該当する道路が追越禁止区間ではない場合(すなわち、S100:NO)、運転支援ECU16はS108に進む。一方、現在地に該当する道路が追越禁止区間である場合(すなわち、S100:YES)、運転支援ECU16はS102に進む。S102では、運転支援ECU16は、撮像装置11及び車両検知センサ12に取得された情報に基づいて、自車両が走行している進路の前方に存在する前方車両を検出する。
S104では、運転支援ECU16は、S102において検出された前方車両の動作状態を認識する。ここでは運転支援ECU16は、後述のS106において判定される追越許容条件に対応した内容の動作状態を認識する。追越許容条件には複数の態様がある。
例えば、追越許容条件の一例として前方車両の車速を判定する態様である場合、運転支援ECU16は、S104において前方車両の車速を表す情報を取得する。具体的には、車両検知センサ12により計測される自車両と前方車両との距離の時間変化に基づいて算出される相対速度と、自車両の車速とを用いて、前方車両の車速を算出する。また、通信装置13による車車間通信を利用して、前方車両から車速を表す情報を取得してもよい。
また、追越許容条件の一例として前方車両が備える方向指示器の点灯状態を判定する態様である場合、運転支援ECU16は、動作状態として前方車両の方向指示器の点灯状態を表す情報を取得する。具体的には、撮像装置11により撮像された画像の中から、前方車両の方向指示器に該当する画像部分を認識し、その画像部分輝度の時間的変化に基づいて方向指示器の点灯状態を特定することが考えられる。また、通信装置13による車車間通信を利用して、前方車両から方向指示器の点灯状態を表す情報を取得してもよい。
また、追越許容条件の一例として前方車両と道路の路端側との位置関係を判定する態様である場合、運転支援ECU16は、動作状態として前方車両の道路上での位置と、道路の路端側の構造物との位置関係を表す情報を取得する。ここでいう道路の路端側とは、車両通行帯の外側に接続して設けられている路肩や路側帯等の道路の部分を指す。具体的には、撮像装置11により撮像された画像の中から、道路の車両通行帯と路肩や路側帯とを区分する構造物(例えば、車道外側線や縁石等)に該当する画像部分と、前方車両に該当する画像部分とを認識し、それらの画像部分の近接度合いを特定する。
また、追越許容条件の一例として前方車両における停止表示器材の有無を判定する態様である場合、運転支援ECU16は、動作状態として前方車両の付近に停止表示器材が設置されているか否かに関する情報を取得する。停止表示器材は、車両が停止していることを掲示するための器材である。具体的には、車両が道路上で停止する場合に後方安全のために設置される三角表示板や停止表示灯、発炎筒等が例示される。運転支援ECU16は、撮像装置11により撮像された画像における前方車両の手前や近接する空間に相当する画像領域の中から、停止表示器材に該当する画像部分を認識することにより、前方車両において停止表示器材が設置されていることを特定する。
S106では、運転支援ECU16は、S104において認識された前方車両の動作状態が所定の追越許可条件を満たすか否かを判定する。ここでは、上述した様々な追越許容条件のうち、単一の追越許容条件を用いて判定を行ってもよいし複数の追越許容条件を用いて複合的に判定を行ってもよい。後者の場合、例えば、複数の追越許容条件のうち少なくとも1つを満たす場合に肯定判定をし、全ての追越許容条件を満たさない場合に否定判定をすることが考えられる。
具体的には、追越許容条件の一例として、運転支援ECU16は、前方車両の車速が基準の速さ以下であるか否かを判定する。ここでは、基準の速さを一律に定めてもよいし、現在地の道路の法定速度に対して一定値以上低いことを追越許容条件としてもよい。前方車両の車速が基準の速さ以下である場合(すなわち、S106:YES)、運転支援ECU16はS108に進む。一方、前方車両の車速が基準の速さより大きい場合(すなわち、S106:NO)、運転支援ECU16はS110に進む。
あるいは、追越許容条件の一例として、運転支援ECU16は、前方車両の方向指示器が停止の意思を表す点灯状態であるか否かを判定する。停止の意思を表す点灯状態としては、例えば、左右の方向指示灯を同時に点滅させるハザードランプが挙げられる。前方車両の方向指示器が停止の意思を表す点灯状態である場合(すなわち、S106:YES)、運転支援ECU16はS108に進む。一方、前方車両の方向指示器が停止の意思を表す点灯状態ではない場合(すなわち、S106:NO)、運転支援ECU16はS110に進む。
あるいは、追越許容条件の一例として、運転支援ECU16は、前方車両が路端側に一定以上近接しているか否かを判定する。具体的には、車両通行帯と路肩や路側帯とを区分する構造物と前方車両との間隔が基準値以下であったり、前方車両が車両通行帯を越えて少なくとも一部が路肩や路側帯に進入している場合、前方車両が路端側に一定以上近接していると判定する。前方車両が路端側に一定以上近接している場合(すなわち、S106:YES)、運転支援ECU16はS108に進む。一方、前方車両が路端側に一定以上近接していない場合(すなわち、S106:NO)、運転支援ECU16はS110に進む。
あるいは、追越許容条件の一例として、運転支援ECU16は、前方車両において停止表示器材が設置されているか否かを判定する。前方車両において停止表示器材が設置されている場合(すなわち、S106:YES)、運転支援ECU16はS108に進む。一方、前方車両において停止表示器材が設置されていない場合(すなわち、S106:NO)、運転支援ECU16はS110に進む。
前方車両の動作状態が追越許容条件を満たす場合に進むS108では、運転支援ECU16は、追越動作に対して警報を行わない動作態様である「警報なし」を選択する。一方、前方車両の動作状態が追越許容条件を満たさない場合に進むS110では、運転支援ECU16は、追越禁止区間における追越動作に対して警報を行う動作態様である「警報あり」を選択する。
[追越監視処理の説明]
運転支援ECU16が実行する追越監視判定処理の手順について、図3のフローチャートを参照しながら説明する。この処理は、所定の制御周期ごとに繰返し実行される。
運転支援ECU16が実行する追越監視判定処理の手順について、図3のフローチャートを参照しながら説明する。この処理は、所定の制御周期ごとに繰返し実行される。
S200では、運転支援ECU16は、撮像装置11や、車両検知センサ、車両情報入力部14、ナビゲーション装置15から取得した各種情報に基づいて自車両の走行状態を監視し、追越動作を検知する。例えば、自車両の進路上の一定距離内に前方車両がいるときに、自車両が進路変更(すなわち、車線変更)を行い、かつ当該前方車両を追い抜く一連の自車両の挙動や運転操作を追越動作として検知する。なお、追越動作を検知する方法については、公知技術であるのでこれ以上の詳細な説明については省略する。
S202では、運転支援ECU16は、S200において追越動作を検知したか否かを判定する。追越動作を検知していない場合(すなわち、S202:NO)、運転支援ECU16はS200に戻る。一方、追越動作を検知した場合(すなわち、S202:YES)、運転支援ECU16はS204に進む。
S204では、運転支援ECU16は、図2に例示される追越許容判定処理において「警報なし」が選択されているか否かを判定する。「警報なし」が選択されている場合(すなわち、S204:YES)、運転支援ECU16は本処理を終了する。一方、「警報あり」が選択されている場合(すなわち、S204:NO)、運転支援ECU16はS206に進む。S206では、運転支援ECU16は、警報出力装置17を通じて追越動作に対する警報を出力する。
[効果]
実施形態の運転支援システム1によれば、以下の効果を奏する。
前方車両の動作状態が追越許容条件を満たすか否かによって、自車両の追越動作に対する警告動作の要否を判断することができる。これによって、自車両の進路上で通常の走行の態様とは異なる動作状態を示す前方車両に対して追越しをかけたとき等に、警報を出さないように制御できる。
実施形態の運転支援システム1によれば、以下の効果を奏する。
前方車両の動作状態が追越許容条件を満たすか否かによって、自車両の追越動作に対する警告動作の要否を判断することができる。これによって、自車両の進路上で通常の走行の態様とは異なる動作状態を示す前方車両に対して追越しをかけたとき等に、警報を出さないように制御できる。
追越許容条件に関する前方車両の動作状態として、例えば、前方車両の車速、方向指示器の点灯状態、道路上の位置、停止表示器材の有無を判定することができる。このような構成によれば、停止車両や、故障や作業中等の理由により低速で走行中の車両に対して追越しを行う場合等、客観的に見て止むを得ない状況において追越しをかけた状況を的確に判別して、警報を抑制できる。
[特許請求の範囲に記載の構成との対応]
実施形態の各構成と、特許請求の範囲に記載の構成との対応は次のとおりである。
運転支援ECU16が実行するS100が、追越禁止判定部としての処理に相当する。運転支援ECU16が実行するS102が、車両検知部としての処理に相当する。運転支援ECU16が実行するS104が、動作状態認識部としての処理に相当する。運転支援ECU16が実行するS200,S202が、追越検知部としての処理に相当する。運転支援ECU16が実行するS204,S206が、警報制御部としての処理に相当する。
実施形態の各構成と、特許請求の範囲に記載の構成との対応は次のとおりである。
運転支援ECU16が実行するS100が、追越禁止判定部としての処理に相当する。運転支援ECU16が実行するS102が、車両検知部としての処理に相当する。運転支援ECU16が実行するS104が、動作状態認識部としての処理に相当する。運転支援ECU16が実行するS200,S202が、追越検知部としての処理に相当する。運転支援ECU16が実行するS204,S206が、警報制御部としての処理に相当する。
[変形例]
上記実施形態における1つの構成要素が有する機能を複数の構成要素として分散させたり、複数の構成要素が有する機能を1つの構成要素に統合したりしてもよい。また、上記実施形態の構成の一部を、課題を解決できる限りにおいて省略してもよい。また、上記実施形態の構成の少なくとも一部を、他の上記実施形態の構成に対して付加、置換等してもよい。なお、特許請求の範囲に記載の文言から特定される技術思想に含まれるあらゆる態様が本発明の実施形態である。
上記実施形態における1つの構成要素が有する機能を複数の構成要素として分散させたり、複数の構成要素が有する機能を1つの構成要素に統合したりしてもよい。また、上記実施形態の構成の一部を、課題を解決できる限りにおいて省略してもよい。また、上記実施形態の構成の少なくとも一部を、他の上記実施形態の構成に対して付加、置換等してもよい。なお、特許請求の範囲に記載の文言から特定される技術思想に含まれるあらゆる態様が本発明の実施形態である。
上述した運転支援ECU16としてコンピュータを機能させるためのプログラム、このプログラムを記録した半導体メモリ等の非遷移的実態的記録媒体等、種々の形態で本発明を実現することもできる。
1…運転支援システム、11…撮像装置、12…車両検知センサ、13…通信装置、14…車両情報入力部、15…ナビゲーション装置、16…運転支援ECU、17…警報出力装置。
Claims (6)
- 自車両の現在地に該当する道路が追越禁止区間に該当するか否かを判定する追越禁止判定部(16,S100)と、
自車両が走行している進路上の前方に存在する車両である前方車両を検知する車両検知部(16,S102)と、
前記車両検知部により検知された前方車両の動作状態を認識する動作状態認識部(16,S104)と、
前記車両検知部により検知された前方車両を自車両が追越すための動作である追越動作を検知する追越検知部(16,S200,S202)と、
前記追越禁止判定部により現在地の道路が追越禁止区間に該当すると判定されている条件下において前記追越検知部により追越動作が検知された場合、自車両の運転者に対して警報を出力する動作である警報動作を実行する警報制御部(16,S204,S206)とを備え、
前記警報制御部は、前記動作状態認識部により認識された前方車両の動作状態が追越を許容する条件である所定の追越許容条件を満たす場合、前記警報動作を禁止するように構成された、運転支援装置。 - 前記動作状態認識部は、前記前方車両の動作状態として前記前方車両の速さを認識し、
前記警報制御部は、前記動作状態認識部により認識された前方車両の速さが前記追越許容条件として設定された基準の速さ以下である場合、前記警報動作を禁止するように構成された、
請求項1に記載の運転支援装置。 - 前記動作状態認識部は、前記前方車両の動作状態として前記前方車両が備える方向指示器の点灯状態を認識し、
前記警報制御部は、前記動作状態認識部により認識された方向指示器の点灯状態が、前記追越許容条件として設定された特定の点灯パターンに該当する場合、前記警報動作を禁止するように構成された、
請求項1又は請求項2に記載の運転支援装置。 - 前記動作状態認識部は、前記前方車両の動作状態として、前記前方車両と道路の路端側との位置関係を認識し、
前記警報制御部は、前記動作状態認識部により認識された前記前方車両と道路の路端側との位置関係が、前記追越許容条件として設定された特定の位置関係に該当する場合、前記追越検知部による検知結果に関わらず前記警報動作を実行しない一方、前記前方車両と道路の路端側との位置関係が前記特定の位置関係に該当しない場合、前記追越検知部により追越動作が検知されたときに前記警報動作を実行するように構成された、
請求項1ないし請求項3の何れか1項に記載の運転支援装置。 - 前記動作状態認識部は、前記前方車両の動作状態として、車両が停止していることを掲示するための器材である停止表示器材の設置の有無を認識し、
前記警報制御部は、前記動作状態認識部により前記前方車両に係る停止表示器材の設置が認識された場合、前記警報動作を禁止するように構成された、
請求項1ないし請求項4の何れか1項に記載の運転支援装置。 - 自車両の現在地に該当する道路が追越禁止区間に該当するか否かを判定する追越禁止判定ステップ(S100)と、
自車両が走行している進路上の前方に存在する車両である前方車両を検知する車両検知ステップ(S102)と、
前記車両検知ステップにおいて検知された前方車両の動作状態を認識する動作状態認識ステップ(S104)と、
前記車両検知ステップにおいて検知された前方車両を自車両が追越すための動作である追越動作を検知する追越検知ステップ(S200,S202)と、
前記追越禁止判定ステップで現在地の道路が追越禁止区間に該当すると判定されている条件下において前記追越検知ステップで追越動作が検知された場合、自車両の運転者に対して警報を出力する動作である警報動作を実行するためのステップであって、前記動作状態認識ステップにおいて認識された前方車両の動作状態が追越を許容する条件である所定の追越許容条件を満たす場合、前記警報動作を禁止する警報制御ステップ(S204,S206)と、
をコンピュータに実行させるためのプログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015237550A JP2017102829A (ja) | 2015-12-04 | 2015-12-04 | 運転支援装置、プログラム |
| US15/366,486 US9792815B2 (en) | 2015-12-04 | 2016-12-01 | Driving assistance apparatus and program |
| DE102016223989.9A DE102016223989A1 (de) | 2015-12-04 | 2016-12-01 | Fahrassistenzvorrichtung und programm |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015237550A JP2017102829A (ja) | 2015-12-04 | 2015-12-04 | 運転支援装置、プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017102829A true JP2017102829A (ja) | 2017-06-08 |
Family
ID=58722743
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015237550A Pending JP2017102829A (ja) | 2015-12-04 | 2015-12-04 | 運転支援装置、プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9792815B2 (ja) |
| JP (1) | JP2017102829A (ja) |
| DE (1) | DE102016223989A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7398633B2 (ja) | 2019-12-24 | 2023-12-15 | パナソニックIpマネジメント株式会社 | 警報制御装置、警報制御方法、プログラム、記録媒体 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102018009433A1 (de) * | 2018-11-30 | 2020-06-04 | Zf Active Safety Gmbh | Objekterkennung durch indirekte Signalreflexion |
| JP6913716B2 (ja) * | 2019-07-17 | 2021-08-04 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、及びプログラム |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000090393A (ja) * | 1998-09-16 | 2000-03-31 | Sumitomo Electric Ind Ltd | 車載型走行路環境認識装置 |
| JP2008090654A (ja) * | 2006-10-03 | 2008-04-17 | Denso Corp | 運転操作支援装置 |
| JP2009143272A (ja) * | 2007-12-11 | 2009-07-02 | Toyota Motor Corp | 走行制御装置 |
| JP2013061797A (ja) * | 2011-09-13 | 2013-04-04 | Mitsubishi Motors Corp | 運転支援装置 |
| JP2015118438A (ja) * | 2013-12-17 | 2015-06-25 | みこらった株式会社 | 自動運転車 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102008005999A1 (de) * | 2008-01-25 | 2009-07-30 | Daimler Ag | Fahrerassistenzsystem und Verfahren zur Unterstützung des Fahrers eines Fahrzeugs beim Halten einer durch Fahrspurmarkierungen begrenzten Fahrspur |
| JP2010287162A (ja) | 2009-06-15 | 2010-12-24 | Aisin Aw Co Ltd | 運転支援装置及びプログラム |
| DE102011009106A1 (de) * | 2011-01-21 | 2012-07-26 | Audi Ag | Verfahren zum Betrieb eines eine auf einen Überholvorgang bezogene Empfehlung ausgebenden Fahrerassistenzsystems eines Kraftfahrzeugs und Kraftfahrzeug |
-
2015
- 2015-12-04 JP JP2015237550A patent/JP2017102829A/ja active Pending
-
2016
- 2016-12-01 US US15/366,486 patent/US9792815B2/en active Active
- 2016-12-01 DE DE102016223989.9A patent/DE102016223989A1/de not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000090393A (ja) * | 1998-09-16 | 2000-03-31 | Sumitomo Electric Ind Ltd | 車載型走行路環境認識装置 |
| JP2008090654A (ja) * | 2006-10-03 | 2008-04-17 | Denso Corp | 運転操作支援装置 |
| JP2009143272A (ja) * | 2007-12-11 | 2009-07-02 | Toyota Motor Corp | 走行制御装置 |
| JP2013061797A (ja) * | 2011-09-13 | 2013-04-04 | Mitsubishi Motors Corp | 運転支援装置 |
| JP2015118438A (ja) * | 2013-12-17 | 2015-06-25 | みこらった株式会社 | 自動運転車 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7398633B2 (ja) | 2019-12-24 | 2023-12-15 | パナソニックIpマネジメント株式会社 | 警報制御装置、警報制御方法、プログラム、記録媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170162044A1 (en) | 2017-06-08 |
| US9792815B2 (en) | 2017-10-17 |
| DE102016223989A1 (de) | 2017-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10169997B2 (en) | Vehicle alert apparatus | |
| JP6500887B2 (ja) | 車両用注意喚起装置 | |
| US8620526B2 (en) | Method for operating a motor vehicle and motor vehicle | |
| JP6407431B2 (ja) | 後方から急接近中の車両を示す出力、又は、後方から極度に急接近中の車両を示す出力に応答して、ホスト車両の運転者に警告を与える、又は、ホスト車両を自律制御するためのレーンアシストシステム及び方法 | |
| CN109844843B (zh) | 用于检查超车可能性条件的方法 | |
| JP5167016B2 (ja) | 車両の運転支援装置 | |
| US20170154527A1 (en) | Apparatus and method for driving assistance | |
| JP4877364B2 (ja) | 物体検出装置 | |
| JP6462493B2 (ja) | 進入判定装置、進入判定方法 | |
| JP2015022499A (ja) | 運転特徴判定システム | |
| CN114174142B (zh) | 车辆注意唤起装置 | |
| CN109969191B (zh) | 驾驶辅助系统和方法 | |
| WO2017104209A1 (ja) | 運転支援装置 | |
| JP2017056779A (ja) | 車線変更操舵制御システム | |
| JP4052167B2 (ja) | 一時停止警報装置 | |
| JP2017102829A (ja) | 運転支援装置、プログラム | |
| CN112088398B (zh) | Ecu和车道偏离警告系统 | |
| US20180273052A1 (en) | Driving support system | |
| JP5272902B2 (ja) | 車両走行支援装置および車両走行支援方法 | |
| KR101839978B1 (ko) | 차량의 주행 상태를 판단하기 위한 장치 및 방법 | |
| JP5218174B2 (ja) | 車両制御装置及び車両制御システム | |
| JP2017102830A (ja) | 運転支援装置、プログラム | |
| KR20210043066A (ko) | 교차로 신호위반 차량 경고 장치 및 방법 | |
| JP6551214B2 (ja) | 車線逸脱警報装置及び車線逸脱警報方法 | |
| JP6238018B2 (ja) | 車両用運転支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180216 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190108 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190709 |