JP2017017889A - モータ駆動装置 - Google Patents
モータ駆動装置 Download PDFInfo
- Publication number
- JP2017017889A JP2017017889A JP2015133449A JP2015133449A JP2017017889A JP 2017017889 A JP2017017889 A JP 2017017889A JP 2015133449 A JP2015133449 A JP 2015133449A JP 2015133449 A JP2015133449 A JP 2015133449A JP 2017017889 A JP2017017889 A JP 2017017889A
- Authority
- JP
- Japan
- Prior art keywords
- lubricating oil
- temperature
- motor
- temperature sensor
- coil
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/60—Controlling or determining the temperature of the motor or of the drive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/36—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings
- B60K6/365—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings with the gears having orbital motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/25—Devices for sensing temperature, or actuated thereby
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/116—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
- H02P29/032—Preventing damage to the motor, e.g. setting individual current limits for different drive conditions
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/60—Controlling or determining the temperature of the motor or of the drive
- H02P29/64—Controlling or determining the temperature of the winding
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/60—Controlling or determining the temperature of the motor or of the drive
- H02P29/68—Controlling or determining the temperature of the motor or of the drive based on the temperature of a drive component or a semiconductor component
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
Abstract
【課題】 潤滑油温センサの異常時に潤滑油の温度を推定し、この推定温度からこのモータ駆動装置を搭載した車両が安全に修理可能な場所等まで移動することができるモータ駆動装置を提供する。【解決手段】 減速機2の潤滑油路に、潤滑油の温度を検出する潤滑油温センサSbを設け、電動モータ1におけるステータに、モータコイルの温度を検出するコイル温度センサSaを設け、電動モータ1の回転速度を検出する回転速度検出センサScを設ける。制御装置U1は、潤滑油温センサSbの異常を検出する異常検出手段41と、この異常検出手段41により潤滑油温センサSbの異常を検出したとき、コイル温度センサSaで検出される温度および回転速度検出センサScで検出される回転速度を用いた定められた関係に基づいて前記潤滑油の温度を推定する潤滑油温推定手段42とを有する。【選択図】 図6
Description
この発明は、モータ駆動装置に関し、潤滑油温センサの異常時に潤滑油の温度を推定するフェールセーフの技術に関する。
モータ駆動装置として、減速機、モータおよび車輪用軸受を有するインホイールモータ駆動装置がある。このインホイールモータ駆動装置において、センサ出力等に基づいてモータの出力制限を行う技術(1)〜(4)が提案されている。
(1)この技術では、インホイールモータの過負荷状態を簡単に確認できる技術として、車輪用軸受、モータ、および減速機から構成されるユニットの温度として、モータステータ、モータロータ、潤滑油、モータケースのいずれかの温度を測定し、その時間微分が規定値を超えた時点でモータの出力制限を行うことが提案されている。また入口温度、出口温度、流量、比熱から発熱量または放熱量を推定し、ある基準値から外れた時点で異常と判断し、モータの出力制限を行う(特許文献1)。
(2)この技術では、減速機から流れ出る潤滑油の温度をより正確に検出する技術として、減速部から潤滑油タンクに潤滑油を排出する排出油路または潤滑油タンクに温度センサを配置し、潤滑油温がある規定値以上となったときに、モータの出力制限を行う(特許文献2)。
(3)この技術では、インホイールモータ駆動装置の潤滑油の温度を測定するセンサとモータステータのコイル温度を測定するセンサを設け、いずれかの温度測定値が第1の閾値を超え、さらに第2の閾値を超えた時点で、モータの出力制限を行う(特願2014−013290)。
(4)この技術では、モータコイルの異常検出を行う技術および異常検出時の対処技術として、異常が発生した側とは異なるもう一方の検出値を基準として、モータの出力制限を行う(特願2014−229464)。
(4)この技術では、モータコイルの異常検出を行う技術および異常検出時の対処技術として、異常が発生した側とは異なるもう一方の検出値を基準として、モータの出力制限を行う(特願2014−229464)。
先行技術(1),(2)および(3)では、潤滑油またはモータコイルの温度を測定し、測定値が閾値以上のときにモータの出力制限を行っているが、センサ自体に異常が発生したときの対応については記載されていない。
先行技術(4)では、異常検知したセンサとは異なるもう一方(二輪の駆動輪のうち、異常判定されていない側)の検出値を代わりの測定値として、その測定値以上の出力を入力しないように制御することが記載されている。しかし、モータコイル温度に限定しており、潤滑油については記載されていない。
先行技術(4)では、異常検知したセンサとは異なるもう一方(二輪の駆動輪のうち、異常判定されていない側)の検出値を代わりの測定値として、その測定値以上の出力を入力しないように制御することが記載されている。しかし、モータコイル温度に限定しており、潤滑油については記載されていない。
このように、モータコイル温度、モータロータ温度、潤滑油温、ハウジング温度等の個別の温度を測定し、それぞれの測定温度がある閾値以上になった時点で、出力制限を行うことは種々提案されている。しかし、いずれかのセンサに異常が発生したときの対応、特に潤滑油の温度を測定する潤滑油温センサに異常が発生したときの対応について、先行技術に記載されているものはない。前記のように潤滑油温センサに異常が発生すると、減速機の過負荷領域において正確な油温検知ができず、減速機に異常が発生する可能性がある。
この発明の目的は、潤滑油温センサの異常時に潤滑油の温度を推定し、この推定温度からこのモータ駆動装置を搭載した車両が安全に修理可能な場所等まで移動することができるモータ駆動装置を提供することである。
この発明のモータ駆動装置は、電動モータ1と、この電動モータ1の回転を減速して車輪に伝達する減速機2と、この減速機2に潤滑油を供給する潤滑油供給機構Jkと、前記電動モータ1を制御する制御装置U1とを備えたモータ駆動装置において、
前記減速機2の潤滑油路29に、潤滑油の温度を検出する潤滑油温センサSbを設け、前記電動モータ1におけるステータ9に、モータコイル78の温度を検出するコイル温度センサSaを設け、前記電動モータ1の回転速度を検出する回転速度検出センサScを設け、
前記制御装置U1は、
前記潤滑油温センサSbの異常を検出する異常検出手段41と、
この異常検出手段41により前記潤滑油温センサSbの異常を検出したとき、前記コイル温度センサSaで検出される温度、および前記回転速度検出センサScで検出される回転速度を用いた定められた関係に基づいて前記潤滑油の温度を推定する潤滑油温推定手段42と、
を有することを特徴とする。
前記定められた関係は、試験やシミュレーション等の結果により定められる。
なお、この明細書において「回転速度」とは、単位時間当たりの回転数と同義である。以後、単位時間当たりの回転数を、単に「回転数」という場合がある。
前記減速機2の潤滑油路29に、潤滑油の温度を検出する潤滑油温センサSbを設け、前記電動モータ1におけるステータ9に、モータコイル78の温度を検出するコイル温度センサSaを設け、前記電動モータ1の回転速度を検出する回転速度検出センサScを設け、
前記制御装置U1は、
前記潤滑油温センサSbの異常を検出する異常検出手段41と、
この異常検出手段41により前記潤滑油温センサSbの異常を検出したとき、前記コイル温度センサSaで検出される温度、および前記回転速度検出センサScで検出される回転速度を用いた定められた関係に基づいて前記潤滑油の温度を推定する潤滑油温推定手段42と、
を有することを特徴とする。
前記定められた関係は、試験やシミュレーション等の結果により定められる。
なお、この明細書において「回転速度」とは、単位時間当たりの回転数と同義である。以後、単位時間当たりの回転数を、単に「回転数」という場合がある。
この構成によると、潤滑油温センサSbは、この潤滑油温センサSbの正常時において、減速機2の潤滑油路29に存在する潤滑油の温度を検出する。ここで、潤滑油温センサSbを設ける目的は、減速機2の温度状態を把握することにより、減速機2の過負荷運転を防止することである。異常検出手段41は潤滑油温センサSbの異常を検出する。潤滑油温推定手段42は、潤滑油温センサSbの異常時において、コイル温度センサSaで検出される温度および回転速度検出センサScで検出される回転速度を用いた定められた関係に基づいて前記潤滑油の温度を推定する。この推定温度は、正常時に潤滑油温センサSbで検出される温度よりも検出精度が劣るものの、減速機2の温度状態を把握するには必要十分である。潤滑油温センサSbに異常が生じた場合においても、潤滑油温推定手段42で推定された温度で減速機2の温度状態を把握することにより、減速機2の過負荷運転を防止することができる。したがって、このモータ駆動装置を搭載した車両が安全に修理可能な場所等まで移動することができる。
前記異常検出手段41は、前記潤滑油温センサSbで検出される潤滑油の温度が定められた温度の上下限値から外れたとき、前記潤滑油温センサSbの異常と判定しても良い。
前記上下限値は、上限値および下限値を含む。前記定められた温度の上下限値は、試験やシミュレーション等の結果により定められる。
前記上下限値は、上限値および下限値を含む。前記定められた温度の上下限値は、試験やシミュレーション等の結果により定められる。
潤滑油温センサSbには、例えば、抵抗を利用したセンサが用いられる。このセンサは、抵抗にある一定の電流を流したときの抵抗の温度変化を電圧値で検知している。センサの機械的な異常の代表例である断線に対する異常検知は、定められた温度の上限値に対して大きいまたは下限値よりも小さいときに、センサに断線があると判断される。
前記潤滑油温推定手段42は、前記回転速度検出センサScで検出される電動モータ1の回転速度が定められた回転速度以上のとき、前記潤滑油の温度を推定しても良い。
前記定められた回転速度は、試験やシミュレーション等の結果により定められる。
前記定められた回転速度は、試験やシミュレーション等の結果により定められる。
モータ駆動装置の損失は、各部の損失が合算された損失となる。減速機2の損失は、例えば、軸受部の転がり抵抗、摺動部の摺動抵抗が主な損失であり、両者共に軸受諸元や減速機内部の隙間が定まれば、回転数に依存した損失となる。また電動モータ1の損失は、鉄損、銅損、および機械損が主な損失となる。銅損はコイル電流に依存し、鉄損はコイル電流と回転数に依存し、機械損は回転数に依存している。そのため、低回転高トルク領域での損失は、銅損が損失の大部分を占め、高回転低トルク領域では、鉄損および減速機損失が損失の大部分を占めることになる。これより、減速機が過負荷状態となり熱的に不利な状況になるのは、高速域全般である。
したがって、減速機2が熱的に不利な状況にあると考えられる定められた回転速度以上のとき、潤滑油の温度を推定することで、減速機2の温度状態を木目細かく把握することができる。これにより、減速機2の過負荷運転を防止することができる。
したがって、減速機2が熱的に不利な状況にあると考えられる定められた回転速度以上のとき、潤滑油の温度を推定することで、減速機2の温度状態を木目細かく把握することができる。これにより、減速機2の過負荷運転を防止することができる。
前記潤滑油温推定手段42は、前記コイル温度センサSaで検出されるモータコイル78の温度に、前記回転速度検出センサScで検出される回転速度に応じた補正値を乗じて前記潤滑油の温度を推定しても良い。
前記補正値は、試験やシミュレーション等の結果により定められる。
前記潤滑油温推定手段42は、前記回転速度検出センサScで検出される回転速度に応じた補正値を定めた補正マップを有し、前記コイル温度センサSaで検出されるモータコイル78の温度に、前記補正マップの補正値を付加して前記潤滑油の温度を推定しても良い。
前記補正値は、試験やシミュレーション等の結果により定められる。
前記補正値は、試験やシミュレーション等の結果により定められる。
前記潤滑油温推定手段42は、前記回転速度検出センサScで検出される回転速度に応じた補正値を定めた補正マップを有し、前記コイル温度センサSaで検出されるモータコイル78の温度に、前記補正マップの補正値を付加して前記潤滑油の温度を推定しても良い。
前記補正値は、試験やシミュレーション等の結果により定められる。
前記制御装置U1は、前記潤滑油温推定手段42で推定された潤滑油の温度が閾値を超えたとき、前記電動モータ1の電流を制限するモータ出力制限手段49を有するものとしても良い。
前記閾値は、試験やシミュレーション等の結果により定められる。
この場合、電動モータ1に過負荷が生じることを防止できると共に、潤滑油の温度上昇を抑えて減速機2に異常が生じることを未然に防止することができる。
前記閾値は、試験やシミュレーション等の結果により定められる。
この場合、電動モータ1に過負荷が生じることを防止できると共に、潤滑油の温度上昇を抑えて減速機2に異常が生じることを未然に防止することができる。
この発明のモータ駆動装置は、電動モータと、この電動モータの回転を減速して車輪に伝達する減速機と、この減速機に潤滑油を供給する潤滑油供給機構と、前記電動モータを制御する制御装置とを備えたモータ駆動装置において、前記減速機の潤滑油路に、潤滑油の温度を検出する潤滑油温センサを設け、前記電動モータにおけるステータに、モータコイルの温度を検出するコイル温度センサを設け、前記電動モータの回転速度を検出する回転速度検出センサを設け、前記制御装置は、前記潤滑油温センサの異常を検出する異常検出手段と、この異常検出手段により前記潤滑油温センサの異常を検出したとき、前記コイル温度センサで検出される温度、および前記回転速度検出センサで検出される回転速度を用いた定められた関係に基づいて前記潤滑油の温度を推定する潤滑油温推定手段とを有する。このため、潤滑油温センサの異常時に潤滑油の温度を推定し、この推定温度からこのモータ駆動装置を搭載した車両が安全に修理可能な場所等まで移動することができる。
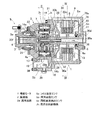
この発明の実施形態に係るモータ駆動装置を図1ないし図9と共に説明する。図1に示すように、このモータ駆動装置は、車輪を駆動する電動モータ1と、この電動モータ1の回転を減速する減速機2と、この減速機2の入力軸3(減速機入力軸3と称す)と同軸の出力部材4によって回転される車輪用軸受5とを備える。これら電動モータ1、減速機2、および車輪用軸受5は、互いに一つの組立部品であるインホイールモータ駆動装置を構成しており、インホイールモータ駆動装置は一部または全部が車輪内に配置される。このインホイールモータ駆動装置であるモータ駆動装置は、さらに潤滑油供給機構Jkと、制御装置U1(図6)とを有する。
車輪用軸受5と電動モータ1との間に減速機2を介在させ、車輪用軸受5で支持される駆動輪である車輪のハブと、電動モータ1のモータ回転軸6と減速機入力軸3と出力部材4とを同軸心上で連結してある。
減速機2を収納する減速機ハウジング7には、車両における図示外のサスペンションが連結される。なお、この明細書において、モータ駆動装置を車両に設けた状態で車両の車幅方向の外側寄りとなる側をアウトボード側と呼び、車両の車幅方向中央寄りとなる側をインボード側と呼ぶ。
減速機2を収納する減速機ハウジング7には、車両における図示外のサスペンションが連結される。なお、この明細書において、モータ駆動装置を車両に設けた状態で車両の車幅方向の外側寄りとなる側をアウトボード側と呼び、車両の車幅方向中央寄りとなる側をインボード側と呼ぶ。
電動モータ1は、モータハウジング8に固定したモータステータ9と、モータ回転軸6に取り付けたモータロータ10との間にラジアルギャップを設けたIPMモータ(いわゆる埋込み磁石型同期モータ)である。モータハウジング8には、軸方向に離隔して軸受11,12が設けられ、これら軸受11,12に、モータ回転軸6が回転自在に支持されている。
モータ回転軸6は、電動モータ1の駆動力を減速機2に伝達するものである。モータ回転軸6の軸方向中間付近部には、径方向外方に延びるフランジ部6aが設けられる。このフランジ部6aにロータ固定部材13が設けられ、ロータ固定部材13にモータロータ10が取付けられている。
減速機入力軸3は、軸方向一端がモータ回転軸6内に延びて、モータ回転軸6とスプライン嵌合されている。出力部材4のカップ部4a内に軸受14aが嵌合され、カップ部4aに内ピン22を介して連結される筒状の連結部材26内に軸受14bが嵌合されている。減速機入力軸3およびモータ回転軸6の一体軸は、軸受14a,14b,11,12により回転自在に支持されている。減速機ハウジング7内における、減速機入力軸3の外周面には、偏心部15,16が設けられる。これら偏心部15,16は、偏心運動による遠心力が互いに打ち消されるように180°位相をずらして設けられている。
減速機2は、外ピンハウジングIhと、減速機入力軸3と、曲線板17,18と、複数の外ピン19と、内ピン22と、カウンタウェイト21とを有するサイクロイド減速機である。
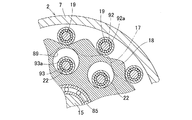
図2は、図1のII-II線断面となる減速機部分の断面図である。減速機2は、外形がなだらかな波状のトロコイド曲線で形成された2枚の曲線板17,18が、それぞれ軸受85を介して、各偏心部15,16に装着してある。これら各曲線板17,18の偏心運動を外周側で案内する複数の外ピン19を、それぞれ減速機ハウジング7の内側の外ピンハウジングIhに設け、カップ部4a(図1)に取り付けた複数の内ピン22を、各曲線板17,18の内部に設けられた複数の円形の貫通孔89に挿入状態に係合させてある。
図2は、図1のII-II線断面となる減速機部分の断面図である。減速機2は、外形がなだらかな波状のトロコイド曲線で形成された2枚の曲線板17,18が、それぞれ軸受85を介して、各偏心部15,16に装着してある。これら各曲線板17,18の偏心運動を外周側で案内する複数の外ピン19を、それぞれ減速機ハウジング7の内側の外ピンハウジングIhに設け、カップ部4a(図1)に取り付けた複数の内ピン22を、各曲線板17,18の内部に設けられた複数の円形の貫通孔89に挿入状態に係合させてある。
図3に拡大して示すように、各外ピン19と各内ピン22には針状ころ軸受92,93が装着される。各外ピン19は、それぞれ針状ころ軸受92で両端支持されて各曲線板17,18の外周面と転接する。また各内ピン22は、針状ころ軸受93の外輪93aが、それぞれ各曲線板17,18の外周との接触抵抗、および各内ピン22と各貫通孔89の内周との接触抵抗を低減する。なお、針状ころ軸受92の外輪93aは外ピンハウジングIhに嵌合固定している。
よって、図1に示すように、各曲線板17,18の偏心運動をスムーズに車輪用軸受5の内方部材5aに回転運動として伝達し得る。モータ回転軸6が回転すると、このモータ回転軸6と一体回転する減速機入力軸3に設けられた各曲線板17,18が偏心運動を行う。このとき外ピン19が偏心運動する各曲線板17,18の外周面と転がり接触するように係合する。これと共に、各曲線板17,18が、内ピン22と貫通孔89(図3)との係合によって、各曲線板17,18の自転運動のみが出力部材4および内方部材5aに回転運動として伝達される。モータ回転軸6の回転に対して内方部材5aの回転は減速されたものとなる。
潤滑油供給機構Jkは、減速機2の潤滑および電動モータ1の冷却の両方に用いられる潤滑油をモータ回転軸6の内部から供給する軸心給油機構である。この潤滑油供給機構Jkは、潤滑油路29と、供給油路30と、排出油路38と、ポンプ28とを有する。潤滑油路29は、減速機2における減速機ハウジング7内の油路であり、この潤滑油路29は潤滑油タンク29aを含む。潤滑油タンク29aは、減速機ハウジング7の下部に設けられ潤滑油を貯留し、モータハウジング8の下部に連通する。
供給油路30は、潤滑油タンク29aから、電動モータ1および減速機2に潤滑油を供給する油路である。この供給油路30は、吸込側油路30a、吐出側油路30b、ハウジング外周側油路30c、連通路30d、モータ回転軸油路30e、および減速機油路30fを含む。吸込側油路30aは、潤滑油タンク29a内の吸込口とポンプ28の吸入口とにわたって連通し、減速機ハウジング7の下部とモータハウジング8の下部とで構成される。吐出側油路30bは、ポンプ28の吐出口に連通し、モータハウジング8内における径方向外方に略沿って延びる。
ハウジング外周側油路30cは、吐出側油路30bに連通し、モータハウジング8内におけるアウトボード側からインボード側に軸方向に沿って延びる。連通路30dは、モータハウジング8のインボード側端に形成され、この連通路30dの流入口がハウジング外周側油路30cに連通し、この連通路30dの流出口がモータ回転軸油路30eに連通する。
モータ回転軸油路30eは、モータ回転軸6内の軸心に沿って設けられる。連通路30dからモータ回転軸油路30eに導かれた潤滑油の一部は、モータ回転軸6およびフランジ部6aの半径方向外方に延びる貫通孔を経由して、ロータ固定部材13内部に形成された半径方向外方に延びる油路を通ることで、モータロータ10が冷却される。さらに前記油路の油吹出し口から、各コイルエンド78aの内周面に対し、モータロータ10の遠心力とポンプ28の圧力とにより潤滑油を射出することで、モータコイル78が冷却される。
減速機油路30fは、減速機2に設けられ、潤滑油を減速機2に供給する。この減速機油路30fは、入力軸油路36と、オイル供給口37とを有する。入力軸油路36は、モータ回転軸油路30eに連通し、減速機入力軸3の内部におけるインボード側端からアウトボード側に軸方向に延びる。オイル供給口37は、入力軸油路36のうち偏心部15,16が設けられる軸方向位置から、半径方向外方に延びている。
減速機ハウジング7には、減速機2の潤滑に供された潤滑油を潤滑油タンク29aに排出する排出油路38が設けられている。
減速機ハウジング7には、減速機2の潤滑に供された潤滑油を潤滑油タンク29aに排出する排出油路38が設けられている。
ポンプ28は、潤滑油タンク29aに貯留された潤滑油を、潤滑油タンク29a内の吸込口から吸込側油路30aを経由させて吸い上げて順次、吐出側油路30b、ハウジング外周側油路30c、連通路30dを経由してモータ回転軸油路30eおよび減速機油路30fに循環させる。このポンプ28は、電動モータ1と減速機2との間に同一軸心上に配置される。ポンプ28は、例えば、出力部材4の回転により回転する図示外のインナーロータと、このインナーロータの回転に伴って従動回転するアウターロータと、ポンプ室と、吸入口と、吐出口(いずれも図示せず)とを有するサイクロイドポンプである。
電動モータ1により駆動される出力部材4の回転により前記インナーロータが回転すると、前記アウターロータは従動回転する。このときインナーロータおよびアウターロータはそれぞれ異なる回転中心を中心として回転することで、前記ポンプ室の容積が連続的に変化する。これにより、潤滑油タンク29aに貯留された潤滑油は、吸込口から吸込側油路30aを経由して吸い上げられて前記吸入口から流入し、前記吐出口から吐出側油路30b、ハウジング外周側油路30c、連通路30dに順次圧送される。
潤滑油は、連通路30dからモータ回転軸油路30eに導かれる。潤滑油の一部は、前述のようにモータロータ10およびモータコイル78を冷却した後、重力によってモータハウジング8の下方に移動し、このモータハウジング8の下部に連通する潤滑油タンク29aに流れ込む。
モータ回転軸油路30eから入力軸油路36を経由してオイル供給口37に導かれた潤滑油は、このオイル供給口37の外径側開口端から排出される。この潤滑油には、遠心力とポンプ28の圧力とが作用することで、潤滑油は減速機2内の各部を潤滑しながら減速機ハウジング7内で半径方向外方に移動する。その後、潤滑油は、重力によって下方に移動し、オイル排出口38から潤滑油タンク29aに貯留される。
センサ類について説明する。
このモータ駆動装置には、潤滑油温センサSb、コイル温度センサSa、および、回転速度検出センサScが設けられている。潤滑油温センサSbは、減速機2の潤滑油路29に存在する潤滑油の温度を検出するセンサであって、この例では、潤滑油タンク29a内に設けられる。潤滑油温センサSbを設ける目的は、減速機2の温度状態を把握することにより、減速機2の過負荷運転を防止することである。潤滑油温センサSbおよび後述のコイル温度センサSaには、抵抗を利用したセンサとして例えばサーミスタが用いられる。具体的には、抵抗の温度変化をある一定の電流を流したときの電圧値で検知している。
このモータ駆動装置には、潤滑油温センサSb、コイル温度センサSa、および、回転速度検出センサScが設けられている。潤滑油温センサSbは、減速機2の潤滑油路29に存在する潤滑油の温度を検出するセンサであって、この例では、潤滑油タンク29a内に設けられる。潤滑油温センサSbを設ける目的は、減速機2の温度状態を把握することにより、減速機2の過負荷運転を防止することである。潤滑油温センサSbおよび後述のコイル温度センサSaには、抵抗を利用したセンサとして例えばサーミスタが用いられる。具体的には、抵抗の温度変化をある一定の電流を流したときの電圧値で検知している。
電動モータ1のモータステータ9には、モータコイル78の温度を検出するコイル温度センサSaが設けられている。このコイル温度センサSaは、モータコイル78が耐熱温度を超えないように監視をしている。
図4は、図1のIV-IV線断面となるモータ部分の断面図である。
電動モータ1のモータロータ10は、例えば、軟質磁性材料からなるコア部(図示せず)と、このコア部に内蔵される永久磁石(図示せず)とを有する。この永久磁石には例えばネオジウム系磁石が用いられている。
図4は、図1のIV-IV線断面となるモータ部分の断面図である。
電動モータ1のモータロータ10は、例えば、軟質磁性材料からなるコア部(図示せず)と、このコア部に内蔵される永久磁石(図示せず)とを有する。この永久磁石には例えばネオジウム系磁石が用いられている。
電動モータ1のモータステータ9は、例えば、軟質磁性材料からなるステータコア部77と、モータコイル78と、絶縁部材79とを有する。ステータコア部77は、外周面が断面円形とされたリング状で、その内周面に内径側に突出する複数のティース77aが円周方向に並んで形成されている。モータコイル78は、ステータコア部77の各ティース77aに巻回される。各ティース77aにそれぞれ巻回されたモータコイル78のうち、ステータコア部77の幅よりもインボード側およびアウトボード側に突出するコイルエンド78a(図1)に、潤滑油供給機構Jk(図1)から潤滑油が射出され噴きかけられるようになっている。
図5は、図4のA部を拡大して示す部分拡大図である。図4および図5に示すように、円周方向に互いに隣り合うティース77a,77a間における、円周方向に互いに隣り合うモータコイル78の間の隙間δに、モータコイル78の温度を検出するコイル温度センサSaを配置している。このコイル温度センサSaは、モータコイル78に近接して配置され、且つ、モータ回転軸6(図1)の中心L1より上部に配置される。互いに隣り合うモータコイル78,78は、コイル温度センサSaと共に絶縁性材料から成る絶縁部材79で覆われている。
図1に示すように、潤滑油供給機構Jkにより、モータ軸心から半径方向外方に供給された潤滑油は、モータロータ10から放射状に噴出し、コイルエンド78aに噴きかかる構造である。このため、低回転域では潤滑油が噴出する流速が小さいが、高回転域では潤滑油が噴出する流速が大きく、潤滑油はコイルエンド78aに噴きかかった後、隔壁や周辺に飛び散る。加熱した潤滑油がコイルエンド78aに噴きかかった場合には、その潤滑油によりモータコイル78が加熱される。
このモータコイル78の熱伝導により、コイル温度センサSa付近の温度も上昇し、コイル温度センサSaは潤滑油の温度上昇に追随して温度上昇する。そのときのコイル温度と潤滑油との温度差は、数度(例えば1〜20℃程度)の温度差をもって推移する。潤滑油の影響を受けにくくするために、スロット間にコイル温度センサSaを配置した場合でも、熱伝導により、コイル温度は一定の温度差をもって潤滑油の温度上昇に追随する。
回転速度検出センサScは、モータハウジング8内に設けられ、電動モータ1の回転速度を検出する。後述するモータ駆動制御部48(図6)は、モータロータ10の回転角度を回転速度検出センサScから得てベクトル制御を行う。この回転速度検出センサScとしては、例えば、レゾルバやGMRセンサ等を適用可能である。
制御系について説明する。
図6は、このモータ駆動装置の制御系のブロック図である。制御装置U1は、自動車全般の制御を行う電気制御ユニットであるECU43と、このECU43の指令に従って走行用の電動モータ1の制御を行うインバータ装置44とを有する。インバータ装置44は、各電動モータ1に対して設けられたパワー回路部45と、このパワー回路部45を制御するモータコントロール部46とを有する。モータコントロール部46は、このモータコントロール部46が持つモータ駆動装置に関する各検出値や制御値等の各情報をECU43に出力する機能を有する。
図6は、このモータ駆動装置の制御系のブロック図である。制御装置U1は、自動車全般の制御を行う電気制御ユニットであるECU43と、このECU43の指令に従って走行用の電動モータ1の制御を行うインバータ装置44とを有する。インバータ装置44は、各電動モータ1に対して設けられたパワー回路部45と、このパワー回路部45を制御するモータコントロール部46とを有する。モータコントロール部46は、このモータコントロール部46が持つモータ駆動装置に関する各検出値や制御値等の各情報をECU43に出力する機能を有する。
パワー回路部45は、バッテリ47の直流電力を電動モータ1の駆動に用いる3相の交流電力に変換するインバータ45aと、このインバータ45aを制御するPWMドライバ45bとを有する。インバータ45aは、複数の半導体スイッチング素子(図示せず)で構成される。PWMドライバ45bは、入力された電流指令をパルス幅変調し、前記各半導体スイッチング素子にオンオフ指令を与える。
モータコントロール部46は、コンピュータとこれに実行されるプログラム、および電子回路により構成され、その基本となる制御部としてモータ駆動制御部48を有している。モータ駆動制御部48は、上位制御手段であるECU43から与えられるトルク指令等による加速・減速指令に従い、電流指令に変換して、PWMドライバ45bに電流指令を与える手段である。モータ駆動制御部48は、インバータ45aから電動モータ1に流すモータ電流を電流検出手段35から得て、電流フィードバック制御を行う。また前述のように、モータ駆動制御部48は、モータロータ10(図1)の回転角度を回転速度検出センサScから得てベクトル制御を行う。
モータコントロール部46に、異常検出手段41、潤滑油温推定手段42、モータ出力制限手段49、異常報告手段50、および記憶手段51を設けている。異常検出手段41は潤滑油温センサSbの異常を検出する。
図7は、このモータ駆動装置の潤滑油温センサの異常判定例を示す図である。図6も参照しつつ説明する。異常検出手段41は、潤滑油温センサSbで検出される潤滑油の温度(油温)が定められた温度の上限値(「油温設計上限値」とも言う)よりも大きい、または油温が定められた温度の下限値(「油温設計下限値」とも言う)よりも小さいとき、潤滑油温センサSbに異常有りと判定する。センサの機械的な異常の代表例である断線に対する異常検知は、定められた温度の上限値に対して大きいまたは下限値よりも小さいときに、センサに断線があると判断される。これら上限値、下限値は、試験やシミュレーション等の結果により定められ、記憶手段51に書き換え可能に記憶される。
異常検出手段41は、潤滑油温センサSbの異常有りと判定すると、その異常発生情報を異常報告手段50および潤滑油温推定手段42にそれぞれ送る。潤滑油温推定手段42は、コイル温度センサ異常判定部42aと、油温推定部42bとを有する。コイル温度センサ異常判定部42aは、異常検出手段41から異常発生情報を与えられると、コイル温度センサSaの異常の有無を判定する。
コイル温度センサ異常判定部42aは、前述の潤滑油温センサSbの異常判定例と同様に、コイル温度センサSaで検出されるモータコイル78(図1)の温度(コイル温度)が定められたコイル温度の上限値(「コイル温度設計上限値」とも言う)よりも大きいまたは下限値(「コイル温度設計下限値」とも言う)よりも小さいときに、コイル温度センサSaに異常有りと判定する。コイル温度センサ異常判定部42aは、コイル温度センサSaに異常有りと判定すると、その異常発生情報を異常報告手段50に送る。
コイル温度センサSaに異常が無いと判定されると、油温推定部42bは、コイル温度センサSaで検出される温度および回転速度検出センサScで検出される回転速度を用いた定められた関係に基づいて、潤滑油の温度を推定する。この推定温度は、潤滑油温センサSbの正常時に同潤滑油温センサSbで検出される温度よりも検出精度が劣るものの、減速機2の温度状態を把握するには必要十分である。具体的には、油温推定部42bは、回転速度検出センサScで検出される電動モータ1の回転速度が定められた回転速度以上のとき、コイル温度センサSaで検出されるコイル温度に、回転速度センサScで検出される回転速度に応じた補正値を乗じて前記潤滑油の温度を推定する。
ところで、モータ駆動装置の損失は、各部の損失が合算された損失となる。減速機2の損失は、軸受部の転がり抵抗、摺動部の摺動抵抗が主な損失であり、両者共に軸受諸元や減速機内部の隙間が定まれば、回転数に依存した損失となる。また電動モータ1の損失は、鉄損、銅損、および機械損が主な損失となる。銅損はコイル電流に依存し、鉄損はコイル電流と回転数に依存し、機械損は回転数に依存している。そのため、低回転高トルク領域での損失は、銅損が損失の大部分を占め、高回転低トルク領域では、鉄損および減速機損失が損失の大部分を占めることになる。これより、減速機2が過負荷状態となり熱的に不利な状況になるのは、高速域全般である。
したがって、減速機2が熱的に不利な状況にあると考えられる定められた回転速度以上のとき、油温推定部42bは、コイル温度センサSaで検出されるコイル温度に、回転速度センサScで検出される回転速度に応じた補正値を乗じて前記潤滑油の温度を推定することで、減速機2の温度状態を木目細かく把握し得る。
モータ出力制限手段49は、判定部39と制御部40とを有する。判定部39は、油温推定部42bで推定された潤滑油の温度が閾値を超えたか否かを判定する。油温の閾値は、試験やシミュレーションにより、例えば、油温とその潤滑油の粘度との関係、および、潤滑油の粘度と電動モータ1の回転抵抗との関係等に基づき定められる。この閾値は、記憶手段51に書き換え可能に記憶される。
推定された油温が閾値を超えたと判定部39で判定されると、制御部40は、電動モータ1の電流を低減するように、モータ駆動制御部48を介してパワー回路部45に指令する。この場合に制御部40は、現在のモータ電流に対して定められた割合でモータ電流を低減しても良いし、定められた値低下させても良い。制御部40は、例えば、前記閾値を超えた後、一定時間後に前記閾値以下になると、電動モータ1への出力制限を解除する。
異常報告手段50は、潤滑油温センサSbまたはコイル温度センサSaの異常発生情報を与えられたとき、また推定された油温が閾値を超えたと判定部39で判定されたとき、ECU43に異常発生情報を出力する。ECU43に設けられた異常表示手段52は、異常報告手段50から出力された異常発生情報を受けて、例えば、車両のコンソールパネル等に設けられた表示装置27に、異常を知らせる表示を行わせる。
図8は、このモータ駆動装置の潤滑油温の推定例を示すフローチャートである。図6も参照しつつ説明する。本処理開始後、潤滑油温センサSbにより潤滑油の温度を検出し、コイル温度センサSaによりコイル温度を検出する(ステップS1)。次に、異常検出手段41は潤滑油温センサSbで検出される油温の閾値判定を行い、コイル温度センサ異常判定部42aはコイル温度センサSaで検出されるコイル温度の閾値判定を行う(ステップS2)。
異常検出手段41は、潤滑油温センサSbで検出される油温が、油温設計下限値以上で油温設計上限値以下であるかを判定する。コイル温度センサ異常判定部42aは、コイル温度センサSaで検出されるコイル温度が、コイル温度設計下限値以上でコイル温度設計上限値以下であるかを判定する。これら潤滑油温センサSbおよびコイル温度センサSaでそれぞれ検出される温度が定められた下限値以上上限値以下(正常測定領域:図7参照)と判定されると(ステップS2:Yes)、ステップS1に戻る。
いずれか一方のセンサSb,Saで検出される温度が上限値よりも大きいまたは下限値よりも小さいとき(ステップS2:No)、異常報告手段50はECU43に異常発生情報を出力し、異常表示手段52は表示装置27に異常を知らせる表示を行わせる(ステップS3)。次に、異常検出手段41が潤滑油温センサSbに異常有りと判定し、且つ、コイル温度センサ異常判定部42aがコイル温度センサSaを正常であると判定すると(ステップS4:Yes)、油温推定部42bは、コイル温度センサSaおよび回転速度検出センサScを用いて潤滑油の油温を推定する(ステップS5)。その後本処理を終了する。コイル温度センサ異常判定部42aがコイル温度センサSaも異常であると判定すると(ステップS4:No)、異常表示手段52はその異常発生情報を受けて表示装置27に異常(修理依頼)を知らせる表示を行わせる(ステップS6)。その後本処理を終了する。
図9は、このモータ駆動装置を搭載した車両の概略構成を示す図である。この車両では、左右の後輪53,53がそれぞれ独立の電動モータ1により駆動される。各電動モータ1はインホイールモータ駆動装置を構成する。この実施形態のインホイールモータ駆動装置においては、後輪駆動を示したが、前輪駆動でも四輪駆動としても良い。
以上説明したモータ駆動装置によると、潤滑油温推定手段42は、潤滑油温センサSbの異常時において、コイル温度センサSaで検出されるコイル温度および回転速度検出センサScで検出される回転速度を用いた定められた関係に基づいて前記潤滑油の温度を推定する。この推定温度は、正常時に潤滑油温センサSbで検出される温度よりも検出精度が劣るものの、減速機2の温度状態を把握するには必要十分である。潤滑油温センサSbに異常が生じた場合においても、潤滑油温推定手段42で推定された温度で減速機2の温度状態を把握することにより、減速機2の過負荷運転を防止することができる。
したがって、このモータ駆動装置を搭載した車両が安全に修理可能な場所等まで移動することができる。特に減速機2が熱的に不利な状況にあると考えられる定められた回転速度以上のとき、潤滑油の温度を推定することで、減速機2の温度状態を木目細かく把握することができる。これにより、減速機2の過負荷運転を防止することができる。
図10に示すように、車体に二台の電動モータ1,1および各電動モータ1に対応する減速機(図示せず)を設け、これら電動モータ1,1により左右の車輪53,53を駆動する二モータオンボードタイプの電気自動車にこのモータ駆動装置を適用しても良い。この例では後輪駆動を示したが、前輪駆動でも四輪駆動としても良い。
図示しないが、車体に一台の電動モータおよび減速機を設け、前記一台の電動モータにより左右の車輪を駆動する一モータタイプの電気自動車に、このモータ駆動装置を適用しても良い。
モータ駆動装置の減速機として、サイクロイド式の減速機を適用したが、遊星減速機、平行2軸減速機、その他の減速機を適用可能である。
モータ駆動装置の減速機として、サイクロイド式の減速機を適用したが、遊星減速機、平行2軸減速機、その他の減速機を適用可能である。
潤滑油温推定手段は、回転速度検出センサで検出される回転速度に応じた補正値を定めた補正マップを有し、コイル温度センサで検出されるモータコイルの温度に、補正マップの補正値を付加して前記潤滑油の温度を推定しても良い。補正マップは、例えば、前記記憶手段に記憶される。
以上、実施形態に基づいてこの発明を実施するための形態を説明したが、今回開示された実施の形態はすべての点で例示であって制限的なものではない。この発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
1…電動モータ
2…減速機
9…モータステータ
29…潤滑油路
41…異常検出手段
42…潤滑油温推定手段
49…モータ出力制限手段
78…モータコイル
Jk…潤滑油供給機構
U1…制御装置
Sa…コイル温度センサ
Sb…潤滑油温センサ
Sc…回転速度検出センサ
2…減速機
9…モータステータ
29…潤滑油路
41…異常検出手段
42…潤滑油温推定手段
49…モータ出力制限手段
78…モータコイル
Jk…潤滑油供給機構
U1…制御装置
Sa…コイル温度センサ
Sb…潤滑油温センサ
Sc…回転速度検出センサ
Claims (5)
- 電動モータと、この電動モータの回転を減速して車輪に伝達する減速機と、この減速機に潤滑油を供給する潤滑油供給機構と、前記電動モータを制御する制御装置とを備えたモータ駆動装置において、
前記減速機の潤滑油路に、潤滑油の温度を検出する潤滑油温センサを設け、前記電動モータにおけるステータに、モータコイルの温度を検出するコイル温度センサを設け、前記電動モータの回転速度を検出する回転速度検出センサを設け、
前記制御装置は、
前記潤滑油温センサの異常を検出する異常検出手段と、
この異常検出手段により前記潤滑油温センサの異常を検出したとき、前記コイル温度センサで検出される温度、および前記回転速度検出センサで検出される回転速度を用いた定められた関係に基づいて前記潤滑油の温度を推定する潤滑油温推定手段と、
を有することを特徴とするモータ駆動装置。 - 請求項1に記載のモータ駆動装置において、前記異常検出手段は、前記潤滑油温センサで検出される潤滑油の温度が定められた温度の上下限値から外れたとき、前記潤滑油温センサの異常と判定するモータ駆動装置。
- 請求項1または請求項2に記載のモータ駆動装置において、前記潤滑油温推定手段は、前記回転速度検出センサで検出される電動モータの回転速度が定められた回転速度以上のとき、前記潤滑油の温度を推定するモータ駆動装置。
- 請求項1ないし請求項3のいずれか1項に記載のモータ駆動装置において、前記潤滑油温推定手段は、前記コイル温度センサで検出されるモータコイルの温度に、前記回転速度検出センサで検出される回転速度に応じた補正値を乗じて前記潤滑油の温度を推定するモータ駆動装置。
- 請求項1ないし請求項4のいずれか1項に記載のモータ駆動装置において、前記制御装置は、前記潤滑油温推定手段で推定された潤滑油の温度が閾値を超えたとき、前記電動モータの電流を制限するモータ出力制限手段を有するモータ駆動装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015133449A JP2017017889A (ja) | 2015-07-02 | 2015-07-02 | モータ駆動装置 |
| PCT/JP2016/069339 WO2017002881A1 (ja) | 2015-07-02 | 2016-06-29 | モータ駆動装置 |
| CN201680037925.0A CN107710598A (zh) | 2015-07-02 | 2016-06-29 | 电动机驱动装置 |
| EP16817989.3A EP3319227A4 (en) | 2015-07-02 | 2016-06-29 | MOTOR DRIVE DEVICE |
| US15/843,554 US10230323B2 (en) | 2015-07-02 | 2017-12-15 | Motor drive device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015133449A JP2017017889A (ja) | 2015-07-02 | 2015-07-02 | モータ駆動装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017017889A true JP2017017889A (ja) | 2017-01-19 |
Family
ID=57608581
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015133449A Pending JP2017017889A (ja) | 2015-07-02 | 2015-07-02 | モータ駆動装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10230323B2 (ja) |
| EP (1) | EP3319227A4 (ja) |
| JP (1) | JP2017017889A (ja) |
| CN (1) | CN107710598A (ja) |
| WO (1) | WO2017002881A1 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180124283A (ko) * | 2017-05-11 | 2018-11-21 | 현대모비스 주식회사 | 인휠 모터 시스템의 제어 장치 및 방법 |
| WO2021200631A1 (ja) * | 2020-03-30 | 2021-10-07 | 日本電産シンポ株式会社 | 駆動制御システム |
| WO2022044713A1 (ja) * | 2020-08-31 | 2022-03-03 | 株式会社椿本チエイン | モータ装置、ギヤモータ、検知方法、及びコンピュータプロダクト |
| WO2023195118A1 (ja) * | 2022-04-07 | 2023-10-12 | 三菱電機株式会社 | 劣化判別装置および劣化判別方法 |
| WO2023223630A1 (ja) * | 2022-05-20 | 2023-11-23 | 日本精工株式会社 | モータ制御装置及び電動パワーステアリング装置 |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109510390B (zh) * | 2017-09-15 | 2021-07-09 | 日本电产株式会社 | 驱动装置 |
| CN109510364B (zh) * | 2017-09-15 | 2021-04-16 | 日本电产株式会社 | 驱动装置 |
| CN109664765B (zh) * | 2017-10-13 | 2022-09-02 | 三菱自动车工业株式会社 | 用于包括电机的电动车辆的显示装置 |
| US10749404B2 (en) * | 2018-01-12 | 2020-08-18 | Ford Global Technologies, Llc | Terminal connector assembly in overmolded single unit with coil end windings, temperature sensors, and cooling channel |
| JP7025945B2 (ja) * | 2018-01-31 | 2022-02-25 | 株式会社小松製作所 | 電動機、回転駆動システム及び油圧ショベル |
| US10808834B2 (en) | 2018-11-30 | 2020-10-20 | Arvinmeritor Technology, Llc | Axle assembly and method of control |
| US10985635B2 (en) | 2018-11-30 | 2021-04-20 | Arvinmeritor Technology, Llc | Axle assembly having a resolver and a method of assembly |
| US11038396B2 (en) | 2018-11-30 | 2021-06-15 | Arvinmeritor Technology, Llc | Axle assembly having an electric motor module and method of assembly |
| US10935120B2 (en) | 2018-11-30 | 2021-03-02 | Arvinmeritor Technology, Llc | Axle assembly having a spigot bearing assembly |
| US10808830B2 (en) | 2018-11-30 | 2020-10-20 | Arvinmeritor Technology, Llc | Axle assembly with multiple lubricant chambers |
| US10704597B2 (en) * | 2018-11-30 | 2020-07-07 | Arvinmeritor Technology, Llc | Axle assembly having a bearing preload module |
| US10801602B2 (en) | 2018-11-30 | 2020-10-13 | Arvinmeritor Technology, Llc | Axle assembly having counterphase planet gears |
| US11362615B1 (en) * | 2020-06-29 | 2022-06-14 | Amazon Technologies, Inc. | Model-based current limiter for an electric motor |
| US11579022B2 (en) * | 2020-09-09 | 2023-02-14 | Texas Instruments Incorporated | Data transfer through an isolated power supply |
| CN112416030B (zh) * | 2020-11-30 | 2022-02-22 | 天津民昌科技有限公司 | 一种基于油泵电机电气特性的油温估算方法 |
| EP4324087A1 (fr) * | 2021-04-12 | 2024-02-21 | Valeo Equipements Electriques Moteur | Dispositif de commande d'un onduleur/redresseur |
| FR3121804A1 (fr) * | 2021-04-12 | 2022-10-14 | Valeo Equipements Electriques Moteur | Dispositif de commande d’un onduleur/redresseur |
| CN113074103B (zh) * | 2021-04-23 | 2022-08-16 | 北京航空航天大学宁波创新研究院 | 带通信故障自适应运行的电子油泵控制方法和系统 |
| CN114077270A (zh) * | 2021-11-18 | 2022-02-22 | 苏州心岭迈德医疗科技有限公司 | 一种液体流量控制系统、方法、装置以及可读存储介质 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5072370B2 (ja) * | 2007-01-12 | 2012-11-14 | Ntn株式会社 | インホイールモータ駆動装置 |
| JP4297948B2 (ja) * | 2007-04-13 | 2009-07-15 | トヨタ自動車株式会社 | ハイブリッド駆動装置およびその制御方法 |
| JP5185846B2 (ja) * | 2009-01-28 | 2013-04-17 | 日立建機株式会社 | 作業車両の走行駆動装置 |
| JP5603807B2 (ja) | 2011-03-07 | 2014-10-08 | Ntn株式会社 | 電気自動車用駆動モータの診断装置および診断方法並びに電気自動車用駆動モータの診断装置を備えた電気自動車 |
| JP5893361B2 (ja) * | 2011-11-24 | 2016-03-23 | Ntn株式会社 | モータの制御装置 |
| CN202494916U (zh) * | 2012-03-23 | 2012-10-17 | 中煤第五建设有限公司 | 基建矿井机电设备安全监测装置 |
| JP6192919B2 (ja) | 2012-11-02 | 2017-09-06 | Ntn株式会社 | インホイールモータ駆動装置 |
| JP6295049B2 (ja) * | 2013-09-25 | 2018-03-14 | Ntn株式会社 | インホイールモータ駆動装置 |
| JP2015063266A (ja) * | 2013-09-26 | 2015-04-09 | Ntn株式会社 | 車輪用駆動装置 |
| JP6314448B2 (ja) * | 2013-11-29 | 2018-04-25 | アイシン精機株式会社 | 作動油温度推定装置 |
| JP6274886B2 (ja) | 2014-01-28 | 2018-02-07 | Ntn株式会社 | インホイールモータ駆動装置 |
| JP6396180B2 (ja) | 2014-11-12 | 2018-09-26 | Ntn株式会社 | 車輪独立駆動式車両の駆動制御装置 |
-
2015
- 2015-07-02 JP JP2015133449A patent/JP2017017889A/ja active Pending
-
2016
- 2016-06-29 WO PCT/JP2016/069339 patent/WO2017002881A1/ja active Application Filing
- 2016-06-29 CN CN201680037925.0A patent/CN107710598A/zh not_active Withdrawn
- 2016-06-29 EP EP16817989.3A patent/EP3319227A4/en not_active Withdrawn
-
2017
- 2017-12-15 US US15/843,554 patent/US10230323B2/en not_active Expired - Fee Related
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180124283A (ko) * | 2017-05-11 | 2018-11-21 | 현대모비스 주식회사 | 인휠 모터 시스템의 제어 장치 및 방법 |
| KR102323684B1 (ko) | 2017-05-11 | 2021-11-09 | 현대모비스 주식회사 | 인휠 모터 시스템의 제어 장치 및 방법 |
| WO2021200631A1 (ja) * | 2020-03-30 | 2021-10-07 | 日本電産シンポ株式会社 | 駆動制御システム |
| WO2022044713A1 (ja) * | 2020-08-31 | 2022-03-03 | 株式会社椿本チエイン | モータ装置、ギヤモータ、検知方法、及びコンピュータプロダクト |
| JP2022041162A (ja) * | 2020-08-31 | 2022-03-11 | 株式会社椿本チエイン | モータ装置、ギヤモータ、検知方法、及びコンピュータプログラム |
| TWI812997B (zh) * | 2020-08-31 | 2023-08-21 | 日商椿本鏈條股份有限公司 | 馬達裝置、齒輪馬達、檢測方法以及電腦產品 |
| WO2023195118A1 (ja) * | 2022-04-07 | 2023-10-12 | 三菱電機株式会社 | 劣化判別装置および劣化判別方法 |
| WO2023223630A1 (ja) * | 2022-05-20 | 2023-11-23 | 日本精工株式会社 | モータ制御装置及び電動パワーステアリング装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US10230323B2 (en) | 2019-03-12 |
| WO2017002881A1 (ja) | 2017-01-05 |
| CN107710598A (zh) | 2018-02-16 |
| EP3319227A4 (en) | 2019-01-16 |
| US20180109222A1 (en) | 2018-04-19 |
| EP3319227A1 (en) | 2018-05-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017002881A1 (ja) | モータ駆動装置 | |
| WO2015115217A1 (ja) | インホイールモータ駆動装置 | |
| JP6192919B2 (ja) | インホイールモータ駆動装置 | |
| JP7367429B2 (ja) | モータユニットの制御装置 | |
| WO2015045903A1 (ja) | 車輪用駆動装置 | |
| JP5705585B2 (ja) | 電気自動車 | |
| JP2008168790A (ja) | インホイールモータ駆動装置 | |
| JP2014076781A (ja) | 車載用電力制御装置の冷却システム及びその異常診断方法 | |
| JP2012189095A (ja) | モータの診断方法 | |
| JP6099965B2 (ja) | インホイールモータ駆動装置 | |
| JP2013110804A (ja) | 電気自動車のモータ制御装置 | |
| WO2015093381A1 (ja) | 電動車両の異常検知装置 | |
| JP5473626B2 (ja) | インホイールモータ冷却装置 | |
| JP6545575B2 (ja) | インホイールモータ駆動装置 | |
| JP2018159625A (ja) | 異常診断装置 | |
| JP5735305B2 (ja) | 電気自動車 | |
| WO2014168092A1 (ja) | インホイールモータ駆動装置 | |
| JP2018046742A (ja) | インホイールモータ駆動装置 | |
| JP2013104532A (ja) | インホイールモータ車両駆動装置 | |
| JP2012178918A (ja) | 電気自動車 | |
| JP2018088768A (ja) | モータ搭載自動車の駆動制御装置 | |
| JP5731594B2 (ja) | 電気自動車 | |
| JP5469700B2 (ja) | インホイールモータ駆動装置 |