(第1の実施形態)
本発明の基板処理装置の一実施形態である塗布、現像装置について説明する。塗布、現像装置は、円形の基板であるウエハWを加熱する加熱モジュール1と、当該ウエハWを加熱モジュール1に対して搬送する基板搬送機構とを備えている。この基板搬送機構はウエハWの裏面周縁部を保持する保持体21を含む。例えばウエハWは、その表面にレジスト膜が形成された状態で保持体21により加熱モジュール1に搬送され、加熱モジュール1にて加熱されることで、レジスト膜中に残留する溶剤が除去される。
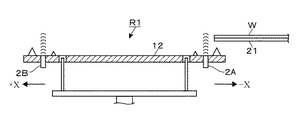
図1は加熱モジュール1の縦断側面を示し、図2は加熱モジュール1の横断平面と保持体21の平面とを示している。保持体21は平面視概ねC字をなす水平板状に形成されており、加熱モジュール1に対して前後、左右に移動自在、且つ、鉛直軸周りに回転自在に構成されている。加熱モジュール1は、ウエハWの載置部をなす水平な円形の熱板12を備えている。図1中13は、熱板12を加熱するためのヒーターである。熱板12の表面には、複数の支持ピン14が分散して設けられており、ウエハWが正常に熱板12に受け渡された場合、ウエハWはこれらの支持ピン14上に水平に支持され、熱板12から若干浮いた状態で加熱される。支持ピン14の高さは例えば0.1mmである。
また、熱板12の表面には、複数の位置規制ピン15が熱板12の周縁部に沿って間隔をおいて設けられており、位置規制ピン15に囲まれる領域は、ウエハWの載置領域R1として構成されている。位置規制ピン15は、この載置領域R1にウエハWを載置する際に、載置領域R1に載置されるようにウエハWの位置を規制する。さらに熱板12には厚さ方向に貫通孔が設けられ、この貫通孔内を昇降して熱板12上にて突没する3本の昇降ピン16(図1では2本のみ表示している)が設けられている。図1中17は、昇降ピン16を昇降させるピン昇降機構である。
熱板12には、上記の載置領域の周縁部に沿って間隔をおいて4つの孔が設けられ、各孔内には夫々超音波センサ2A〜2Dが埋設されている。超音波センサ2(2A〜2D)は反射型のセンサであり、垂直上方に向けて超音波を照射する。保持体21により、超音波センサ2A〜2Dの上方にウエハWが位置する場合には、当該ウエハWに照射された超音波が反射され、この反射波を超音波センサ2A〜2Dが受波する。そして、各超音波センサ2A〜2Dは、この反射波に基づいた検出信号を、超音波センサ2A〜2D毎に設けられたアンプ22を介して後述の判定部をなす制御部3に送信する。
この制御部3に送信される検出信号には、各超音波センサ2とその上方のウエハWとの距離についての情報が含まれており、制御部3は当該検出信号に基づいて各超音波センサ2A〜2DとウエハWとの距離を検出する。このような構成により、例えば、超音波センサ2A〜2Dに対して0mm〜30mm離れた位置のウエハWが検出可能とされる。
上記のように超音波センサ2A〜2Dが配置されていることで、ウエハWが載置領域R1あるいはその上方に位置しているときには、各超音波センサ2A〜2Dと、各超音波センサ2A〜2D上のウエハWとの離間距離が検出されることになる。例えば加熱モジュール1の稼働中は、超音波センサ2A〜2Dから常時、超音波が出力され、センサ2A〜2B及びウエハW間における離間距離が監視される。ここでいう離間距離の監視には、超音波センサ2A〜2D上におけるウエハWの有無の監視も含まれる。
また、図2では熱板12の中心、即ちウエハWの載置領域R1の中心点をPで示しており、ウエハWが正常に熱板12に載置される場合は、中心点PとウエハWの中心とが一致する。ところで、以降の説明では図2に示すように保持体21から熱板12に向かって見て、前方、後方を夫々+X方向、−X方向とし、左方、右方を夫々+Y方向、−Y方向として記載する場合がある。また、+X方向及び+Y方向に対して45°傾いた方向を+J方向と記載し、+X方向及び−Y方向に45°傾いた方向を+K方向と記載し、+J方向、+K方向に夫々反対する方向を−J方向、−K方向と記載する場合がある。上記の超音波センサ2A〜2Dについてはマトリクス状に配置されており、2A、2B、2C、2Dは、夫々中心点Pに対して、−K、+J、−J、+K方向に離れた位置に設けられている。
ている。
図1中23は昇降自在なシャッタであり、熱板12を囲む起立した円筒形に構成されている。図中24は円形の天板であり、熱板12の上方に設けられる。天板24の下面中央部には、排気口25が開口している。ウエハWが熱板12に載置されて加熱処理される際には、図1に示すようにシャッタ23の上端と、天板24の周縁部との間に若干の隙間が形成された状態で、排気口25により排気が行われる。それによって、熱板12の外方から熱板12上に流れ、排気口25により排気される大気の気流に曝されて、ウエハWが加熱される。図1では、矢印でこの気流を示している。保持体21がウエハWを熱板12に対して受け渡すときには、保持体21の移動を妨げないように、シャッタ23は図1に示す位置から下降する。
続いて、制御部3について説明する。制御部3は例えばコンピュータからなり、不図示のプログラム格納部を有している。このプログラム格納部には、加熱モジュール1の各部の動作の制御、ウエハWを受け渡すための保持体21の移動の制御、超音波センサ2A〜2Dからの検出信号に基づいた超音波センサ2A〜2DとウエハWとの離間距離の検出、後述する離間距離の経時変化のデータの作成、及び経時変化のデータに基づいた各種の判定など、後述する各種の動作が行えるように命令(ステップ群)が組まれたプログラムが格納されている。そして、当該プログラムによって、制御部3から搬送機構及び加熱モジュール1を含む塗布、現像装置の各部に制御信号が出力されることで、後述の各動作が行われる。このプログラムは、例えばハードディスク、コンパクトディスク、マグネットオプティカルディスクまたはメモリーカードなどの記憶媒体に収納された状態でプログラム格納部に格納される。
また、制御部3はメモリを備えている。後述のフローに沿ってウエハWに処理が行われるにあたり、このメモリにはウエハWのIDと、当該ウエハWが正常に加熱処理されたか否かについての情報とが対応付けられて記憶される。異常な処理が行われた場合には、後述するように熱板21上の異物の存在による処理異常か、位置規制ピン15への乗り上げによる処理異常かという情報も記憶される。
また、後述のフローで、センサ2、昇降ピン16、加熱モジュール1について夫々異常があるものと決定された場合には、その旨も記憶される。また、制御部3は、アラーム発生器を備えている。このアラーム発生器は、例えばモニタやスピーカーであり、ウエハWに異常な処理が行われたと決定されたり、センサ2、昇降ピン16、加熱モジュール1について夫々異常があるものと決定された場合に、所定の画面表示や音の出力を行い、ユーザーに異常の発生を報知する。
続いて、正常に熱板12上に受け渡されるときのウエハWの様子を、図3〜図5を用いて説明する。また、このときに上記の超音波センサ2A〜2Dからの検出信号に基づいて、制御部3が取得する超音波センサ2A〜2DとウエハWとの離間距離の経時変化のデータを、図6のタイミングチャートとして示しており、このチャート上における変化も併せて説明する。このタイミングチャートについて補足して説明しておくと、チャートではセンサ2A〜2Dの夫々について、点線の横軸と実線のチャート線との間隔の大きさ(LA〜LDと表記している)によって、ウエハWとセンサ2との離間距離を示す。
より具体的には、センサ2からの検出信号に応じてチャート線は上下に変動し、横軸とチャート線との間隔が大きいほど、ウエハWにおいて超音波が照射された箇所と当該超音波を照射したセンサ2との離間距離が大きいことを表す。また、このチャートにおいては、ウエハWがセンサ2上に無くてセンサ2がウエハWを検出できない場合は、センサ2によりウエハWが検出されるときよりもLA〜LDが大きくなるように示している。なお、上記のようにセンサ2上にウエハWがあるときは、チャート中のLA〜LDはウエハWとセンサ2との離間距離に対応することから、このLA〜LDを離間距離であるものとして説明する場合がある。
先ず、ウエハWを保持した保持体21が熱板12の外側から前方(+X方向)へ移動し(図3)、ウエハWがセンサ2A〜2D上に位置する。チャート中の時刻t1、t2は、保持体21の前進により、ウエハWが検出できない状態から検出可能な状態に変化した時刻を示している。その後、昇降ピン16が上昇し(時刻t3)、ウエハWが昇降ピン16に水平に支持されて保持体21から浮き上がった後、保持体21が後方(−X方向)へ移動し、熱板12上から退避する。この退避中は、ウエハWは熱板12から一定の高さで静止し、離間距離LA〜LDは一定となる。この静止時にウエハWは載置領域R1に重なっている。然る後、ウエハWが水平な状態で昇降ピン16と共に下降し(チャート中時刻t11、図4)、一定であった離間距離LA〜LDは減少を開始する。そして、ウエハWが支持ピン14上に水平に支持され、載置領域R1に重なるように載置されると、離間距離LA〜LDの減少は停止して当該LA〜LDは一定となり(時刻t12)、当該ウエハWは熱板12の熱により加熱処理される(図5)。
然る後、昇降ピン16が上昇してウエハWが水平な状態で支持ピン14から浮き上がり、一定の状態であった離間距離LA〜LDが上昇開始する(時刻t21)。その後、昇降ピン16の上昇が停止し、離間距離LA〜LDの上昇が停止する(時刻t22)。その後、保持体21の前進による当該保持体21のウエハWの下方への移動、昇降ピン16の下降による保持体21へのウエハWの受け渡し、保持体21の後退によるウエハWの熱板12上からの退避が順に行われる。
上記のように熱板12に対するウエハWの受け渡しが正常に行われる場合、受け渡し中にウエハWが水平に保たれることで、各センサ2A〜2DとウエハWにおいて各センサ2A〜2Dから超音波が照射される位置との距離が、同様に変化する。それによって、上記のセンサ2A〜2Dについて、減少開始時刻t11から離間距離LA〜LDの減少停止時刻t12までの時間を距離減少時間T1A〜T1Dとすると、T1A=T1B=T1C=T1Dとなる。またセンサ2A〜2Dについて、上昇開始時刻t21から離間距離LA〜LDの上昇停止時刻t22までの時間を距離上昇時間T2A〜T2Dとすると、T2A=T2B=T2C=T2Dとなる。そして、時刻t12〜t21における離間距離LA〜LDは、LA=LB=LC=LDとなる。
続いて、熱板12にウエハWが異常に載置されるときの一例について、ウエハWの様子を示す図7〜図9を参照しながら、正常に載置される場合との差異点を中心に説明する。また、図10は、そのようにウエハWが異常に載置されるにあたって取得される離間距離Lの推移を、図6と同様にタイミングチャートとして示したものであり、この図10も適宜参照する。なお、図10では図6の時刻t3以降、即ちウエハWが支持するために昇降ピン16が上昇してから後のLの推移を示している。
例えば保持体21が正常な位置に対して+Y方向にずれて熱板12上に位置し、昇降ピン16が上昇したことにより、昇降ピン16上にてウエハWが正常な位置(載置領域R1に重なる位置)から+Y方向にずれて支持される。ただし、ウエハWは各センサ2上に位置しているものとする。そのようにウエハWを支持した昇降ピン16が下降して、離間距離LA〜LDが減少開始する(時刻t11、図7)。そして、昇降ピン16の下降中にウエハWの一端側(+Y方向側)が位置規制ピン15に乗り上げて下降が停止し、LA、LBの減少が停止する。そして、昇降ピン16が下降を続けてウエハWの他端側(−Y方向側)がさらに下降し、支持ピン14に支持されて下降が停止すると、LC、LDの減少が停止する(図8、図9)。従って、離間距離L(LA〜LD)の減少停止時刻t12が互いに異なり、距離減少時間T1(T1A〜T1D)については、T1A≒T1B<T1C≒T1Dとなる。そして、ウエハWは熱板21に対して傾くと共に、載置領域R1に対して+Y方向にずれて載置される。さらに、減少停止時刻t12以降の離間距離LA〜LDは、LA≒LB>LC≒LDとなる。
このようにウエハWが載置された後、昇降ピン16が上昇し、先にウエハWの他端側が昇降ピン16に当接して持ち上げられ、LC、LDが上昇開始し、然る後ウエハWの一端側が昇降ピン16に当接して上昇し、LA、LBが上昇開始する。つまり、離間距離LA〜LDの上昇開始時刻t21が互いに異なる。これ以降ウエハWは、正常に受け渡しが行われた場合と同様に昇降ピン16から保持体21に受け渡され、離間距離LA〜LDの上昇停止時刻t22は互いに一致する。そのため距離上昇時間T2(T2A〜T2D)については、T2A≒T2B<T2C≒T2Dとなる。このようにウエハWの位置規制ピン15への乗り上げが生じると、距離減少時間T1、距離上昇時間T2、時刻t12〜時刻t21の離間距離Lに夫々大小関係が生じる。
ところで、上記の例ではウエハWが載置領域R1の中心点Pから+Y方向にずれて位置規制ピン15に乗り上げたことで、距離減少時間T1、距離上昇時間T2、時刻t12〜時刻t21の離間距離Lの夫々についての大小関係が既述のようになったが、この大小関係は、ウエハWのずれの方向に応じたものとなる。例えばウエハWが+J方向(図9参照)にずれて乗り上げれば、当該+J方向の端部が他の方向の端部より先に下降停止し、ウエハWが熱板12から上昇する際には、他の端部よりも遅く上昇停止するため、T1B<T1A≒T1D<T1C、T2B<T2A≒T2D<T2C、時刻t12〜t21ではLB>LA≒LD>LCとなる。
他の方向にウエハWがずれた場合のT1、T2、t12〜t21のLの大小の例示については省略するが、どの方向にずれても、センサ2間でT1、T2、Lに夫々大小関係、つまりばらつきが生じることで、制御部3は位置規制ピン15への乗り上げの有無の判定が可能になる。なお、この判定はT1、T2、Lのいずれか一つを用いて行ってもよい。ところで、Lについてこのように大小関係を取得することは、±X、±Y、±J、及び±K方向のうちのいずれの方向が高くなるようにウエハWが傾いているかを検出していることに等しい。従って、以下、Lについての大小関係の取得=ウエハWの傾き検出として説明する場合がある。
続いて、熱板12に対するウエハWの受け渡しが異常となる他の一例について、ウエハWの様子を示す図11〜図13と、制御部3により取得される離間距離Lの経時変化をタイミングチャートとして示す図14と、を参照しながら説明する。図14も図10のチャートと同様、時刻t3以降の離間距離Lの推移を示している。この例では、熱板12上において載置領域の中心点Pから+J方向にずれた位置に異物Hが付着しており、異物Hの上端は支持ピン14の上端よりも高い。先ず、正常に受け渡しが行われる場合と同様に、ウエハWは保持体21から上昇した昇降ピン16に受け渡され、昇降ピン16が下降し、離間距離LA〜LDが減少開始する(図11、時刻t11)
昇降ピン16の下降中にウエハWの裏面が異物Hに接触して、異物Hを支点としてウエハWの一端側(+J方向側)が上方に向かい、ウエハWの他端側(−J方向側)が下方に向かうようにウエハWが傾き、LAの減少が停止した後でLB、LCの下降が停止する。然る後、ウエハWの他端部が支持ピン14に支持されることでLDの下降も停止し、ウエハWは熱板12に対して傾いて載置される(図12、図13)。このようにLA〜LDの減少停止時刻t12がセンサ2間で異なることで距離減少時間T1についてはT1A<T1B≒T1C<T1Dとなると共に、下降停止時刻t12以降の離間距離LについてはLA>LB≒LC>LDとなる。
その後、昇降ピン16が上昇し、先にウエハWの他端側(−J方向側)が昇降ピン16に当接して持ち上げられ、LDが上昇開始し、然る後LB、LCが上昇開始した後、ウエハWの一端側(+J方向側)も昇降ピン16に当接して持ち上げられ、LAが上昇開始する。つまり、LA〜LDの上昇開始時刻t21が互いに異なる。これ以降、ウエハWは正常に受け渡しが行われた場合と同様に昇降ピン16から保持体21に受け渡される。従って、LA〜LDの上昇停止時刻t22は互いに一致するため、距離上昇時間T2についてはT2A<T2B≒T2C<T2Dとなる。このように熱板21上に上記の大きさの異物Hが存在してウエハWが熱板12上で傾くと、距離減少時間T1、距離上昇時間T2、時刻t12〜時刻t21のLに夫々大小関係が生じるので、制御部3はこの大小関係によって異物Hの有無の判定を行うことができる。
異物Hが中心点Pからどの方向にずれた位置に存在するかによって、T1間の大小関係、T2間の大小関係、時刻t12〜時刻t21におけるL間の大小関係が夫々決まる。異物Hが他の位置に存在する場合の例を挙げると、中心点Pから+Y方向にずれた位置に異物Hが存在すれば、+Y方向側のウエハWの端部が、当該ウエハWが熱板12に対して下降する際に異物Hに接触して他の方向の端部より先に下降停止する。そして、ウエハWが熱板12から上昇する際には、他の端部よりも遅く上昇停止する。そのためT1A≒T1B<T1C≒T1D、T2A≒T2B<T2C≒T2D、t12〜t21ではLA≒LB>LC≒LDとなる。
他の位置に異物HがあるときのT1、T2、Lの例示については省略するが、どの方向にずれた位置に異物Hがあっても、T1、T2、Lについて夫々大小関係が生じることで、制御部3は異物Hの存在の判定を行うことができる。なお、この判定はT1、T2、Lのいずれか一つを用いて行ってもよい。また、T1、T2またはLによって、中心点Pに対して異物Hがどの方向に存在するかを検出してもよい。
ところで、例えば熱板21に所定の回数ウエハWを載置したときに、時刻t12〜時刻t21におけるLの大小関係が同じ、即ちウエハWが同じように傾く場合には、異物Hは熱板21上に固着しているものとして、熱板21の清掃を促すためのアラームを出力するようにしてもよい。ウエハWに付着してウエハWの搬送と共に異物が熱板21から除去される場合があるので、この判定を行うためにウエハWを載置する上記の所定の回数は1回でもよいが、複数回であることが好ましい。
また、位置規制ピン15の高さは所定の高さであるため、既述のように位置規制ピン15にウエハWが乗り上げた場合、ウエハWは水平面に対して所定の角度となる可能性が高い。従って、時刻t12〜t21の離間距離Lは上記のようにばらつくと共に、夫々所定の範囲に収まる可能性が高い。そこで、そのように各離間距離LA〜LDが所定の範囲に収まるようであれば、LA〜LDは上記の位置規制ピン15に乗り上げたものとみなし、それ以外の場合は異物Hに乗り上げたものとみなしてもよい。後述のフローでは、そのようにみなすことで、各判定を行う。
続いて、正常な位置から比較的大きくずれて保持体21から支持ピン14に受け渡されたウエハWの状態と、そのように受け渡しが行われたときに取得される離間距離Lの経時変化とを示す例について、図15、16を参照しながら説明する。例えば、図4〜図6で説明した例よりも+Y方向に大きくずれた位置にウエハWを保持した保持体21が位置し(時刻t1、t2)、昇降ピン16が上昇し(時刻t3)、ウエハWが昇降ピン16に支持され、保持体21が熱板12上から後退する。図15はこのときのウエハWと熱板12とを示している。支持されたウエハWが載置領域R1に重なる正常な位置から比較的大きくずれていることで、センサ2C、2Dによる検出が行われない。図6で説明したように支持されたウエハWが載置領域R1に重なるように位置している場合、センサ2のすべてでウエハWが検出される。従って、制御部3は、このように昇降ピン16にウエハWが支持されているときにウエハWを検出不可のセンサ2が有るか否か判定することで、正常な位置からのウエハWのずれの有無を検出することができる。
センサ2のうちウエハWを検出不可となるセンサは、上記の正常な位置からのウエハWのずれた方向に対応する。この正常な位置から+Y方向以外にウエハWがずれた例を示すと、+X方向にずれた場合はセンサ2A、2Cが検出不可となり、−K方向にずれた場合はセンサ2Dが検出不可となる。従ってウエハWを検出不可となるセンサから、ウエハWがどの方向にずれて昇降ピン16に支持されているかを検出することができる。
このように昇降ピン16上でのウエハWのずれの方向について検出されると、保持体21が前進した後に昇降ピン16が下降し、保持体21に再度ウエハWが受け渡される。そして、保持体21は、昇降ピン16に支持されていたときに検出されたウエハWの位置ずれが解消される方向、即ちずれが検出された方向とは反対方向に所定量移動する。例えば、図15で示したように+Y方向へウエハWがずれていることが検出された場合、当該ウエハWを受け取った保持体21は、図17に示すように+Y方向とは反対の−Y方向に所定量移動する。なお、上記のように+X方向へのずれが検出された場合には−X方向に、−K方向へのずれが検出された場合には、+K方向に保持体21が所定量移動する。保持体21が所定量移動した後は、昇降ピン16が再度上昇し、当該昇降ピン16にウエハWが支持される。保持体21から昇降ピン16にウエハWを受け渡す場合について説明したが、昇降ピン16から保持体21にウエハWを受け渡す場合も同様に、昇降ピン16上でのウエハWのずれ方向の検出及び位置補正を行うことができる。
続いて、既述のように保持体21から昇降ピン16にウエハWが受け渡されるときに、図18、図19に示すように昇降ピン16のうちの1本の先端部が破損している場合に取得される離間距離Lの経時変化について、図20のタイミングチャートを参照して説明する。図18、図19に示す例では、載置領域R1の中心点Pより−Y方向側の昇降ピン16が折れている。
保持体21が熱板12上に位置した後、昇降ピン16が上昇する(時刻t3)。昇降ピン16が折れていることでウエハWは昇降ピン16に傾いて支持され、図19に示すように、−Y方向側の端部が本来の高さより低く、+Y方向側が本来の高さより高くなる。
然る後、保持体21が後退して熱板21上から退避した後も、ウエハWはそのように傾いたままとされる。従って、図20のタイミングチャートに示すように時刻t3以降、各センサ2によりウエハWが検出可能であるが、各離間距離Lにはばらつきが生じる。そのため、制御部3は、この離間距離Lのばらつきの有無に基づいて、昇降ピン16の破損の有無を検出することができる。この昇降ピン16の破損の検出は、保持体21から昇降ピン16へのウエハWの受け渡し時に行うことに限られず、保持体21にウエハWを受け渡すために昇降ピン16が当該ウエハWを支持して上昇したときにも、同様に行うことができる。
続いて、図21のフローを参照しながら、保持体21と加熱モジュール1との間におけるウエハWの受け渡しと、この受け渡し中に制御部3により行われる各判定とについて、順を追って説明する。先ず、ウエハWを保持した保持体21が、熱板12の外方から熱板12上に前進移動し(ステップD1)、昇降ピン16が上昇し(ステップD2)、当該昇降ピン16によりウエハWが保持体21から突き上げられて支持された後、保持体21が後退する(ステップD3)。保持体21が後退した後、センサ2により検出される離間距離LA〜LDがすべて適正値であるか否かの判定が行われる(ステップD4)。離間距離LA〜LDのうち適正値でないものが有る場合は、対処動作が行われる(ステップD5)。
図22は、このステップD5の対処動作を示すフローである。このステップD5では、先ず昇降ピン16上においてウエハWが熱板21の載置領域R1に対して位置ずれしているか否かの判定が行われる。具体的には、図15、図16に例示したような、センサ2のうちウエハWを検出不可のものが1つまたは2つ有るか否か判定される(ステップE1)。ステップE1でセンサ2のすべてがウエハWを検出しているか、3つ以上のセンサがウエハWを検出不可である判定された場合、昇降ピン16に異常が有るか否かが判定される。具体的には図18〜図20に例示したように、センサ2が全てウエハWを検出しており、且つ離間距離L間にばらつき、即ち昇降ピン16上のウエハWに傾きが有るか否かの判定が行われる(ステップE2)。
ステップE2で昇降ピン16に異常が無い、つまり離間距離L間にばらつきがないと判定された場合、センサ2に異常が有るものと決定される(ステップE3)。その後、加熱モジュール1の各部の動作が停止する(ステップE4)。なお、加熱モジュール1に取り残されたウエハWは、例えば装置のユーザーによって搬出される。
上記のステップE1でウエハWが位置ずれしている判定された場合、ウエハWを検出していないセンサ2から、載置領域R1に対するウエハWのずれ方向が検出され、保持体21が前進及び昇降ピン16の下降による保持体21へのウエハWの受け渡し後、図17で例示したように検出された位置ずれが解消される方向に保持体21が所定量移動し、然る後、昇降ピン16の上昇と、再度の昇降ピン16上におけるウエハWの支持と、保持体21の後退とが順に行われる(ステップE5)。このステップE5が行われると対処動作D5が終了し、上記のステップD4が再度実行される。従って、上記のステップE5の保持体21の所定量の移動がウエハWの位置ずれを解消するために不十分である場合には、再度ステップD5に進み、当該ステップE5の保持体21による位置補正が再度行われることになる。それによって、ウエハWの位置ずれが解消される。
ステップE2で昇降ピン16に異常が有ると判定された場合、当該加熱モジュール1が異常なモジュールであるものとして決定される(ステップE6)。然る後、そのような昇降ピン16により処理が続行可能か否かの判定が行われる。具体的には例えばLA〜LDの標準偏差が演算され、この標準偏差が基準値より大きいか否かが判定される(ステップE7)。処理続行は不可、即ち標準偏差が基準値より大きいと判定された場合、上記のステップE4が実施される。処理続行可能、即ち標準偏差が基準値以下であると判定された場合、対処動作D5が終了し、然る後、ステップD4が再度実施される。ただし、再度ステップD4が実施されるにあたり、ステップE7で異常なモジュールであることが決定されている場合には、離間距離LA〜LDが適正値ではないと判定されてもステップD5には進まず、後述のステップD6に進む。
ステップD4で離間距離LA〜LDがすべて適正値であると判定された場合、昇降ピン16が下降し(ステップD6)、図6、図10、図14などで説明したように離間距離Lが減少を開始する。そして、ウエハWが熱板12上に載置され、離間距離Lの値が一定となる。即ち、各センサ2A〜2Dについて、離間距離LA〜LDの減少開始時刻t11及び減少停止時刻t12が検出され、それによって時刻t11から時刻t12までの距離減少時間T1A〜T1Dが取得される。さらに時刻t12以降の一定となったLA〜LDが取得される。そして、取得されたこれらの値について正常か否か、即ちT1A=T1B=T1C=T1D、且つ時刻t12以降でLA=LB=LC=LDとなっているか否か判定される(ステップD7)。
ステップD7で取得されたT1及びLが正常では無いと判定された場合、昇降ピン16の下降中にウエハWが位置ずれし、図7〜図10で例示したようなウエハWの位置規制ピン15への乗り上げが起きたか否か判定される。より具体的にはT1A〜T1Dに大小関係が有り、且つ時刻t12以降のLA〜LDに大小関係が有り、且つ離間距離LA〜LDが夫々所定の値となっているか否か判定される(ステップD8)。
ステップD8で位置規制ピン15に乗り上げていないと判定された場合、図11〜図14で例示したウエハWの異物Hが熱板11上に存在しているか否か判定される。より具体的には、距離減少時間T1A〜T1Dに大小関係が有り、且つ時刻t12以降の離間距離LA〜LDに大小関係が有る状態となっているか否か判定される(ステップD9)。ステップD9で異物Hが存在しないと判定された場合は、センサ2に異常が有るものと決定され(ステップD10)、熱板12に載置されたウエハWは異常な熱処理が行われたウエハWとして決定される(ステップD11)。ステップD8で位置規制ピン15への乗り上げが起きたと判定された場合及びステップD9で異物Hが存在すると判定された場合も、上記のステップD11が行われる。ステップD11が行われた後は、後述のステップD13が行われる。
ステップD7にて、取得された各T1及びLが正常であると判定された場合、熱板12に載置されたウエハWは正常な熱処理が行われたとして決定される(ステップD12)。その後、昇降ピン16が上昇して(ステップD13)、ウエハWは昇降ピン16上に支持され、離間距離Lが上昇開始する。然る後、昇降ピン16の上昇が停止し、離間距離Lの上昇が停止する。そして図6、図10、図14などで説明した離間距離Lの上昇停止時刻t22が検出される。
然る後、昇降ピン16の上昇停止後、例えば時刻t22以降で離間距離LA〜LDが全て適正値となっているか否かの判定が行われる(ステップD14)。離間距離LA〜LDのうち適正値では無いものがあると判定された場合、ステップD5と同様に、図22で説明した対処動作が行われる(ステップD15)。ただし、このステップD15の対処動作ではステップE5が終了するか、ステップE7で処理続行可能と判定された場合は、ステップD4の代わりにステップD14に進む。そして、ステップD15の対処動作にてステップE6、E7を経てステップD14に進んだ場合、当該ステップD14では、離間距離LA〜LDのうち適正値でないものがあっても離間距離LA〜LDが適正値であるものと判定され、後段のステップD16に進む。ところでステップD15の対処動作中のステップE5は、後段のステップD16で保持体21が正常な位置でウエハWを受け取るためのステップとなる。つまり、このステップD15のステップEでは、例えばウエハWは正常な保持位置からずれた位置でウエハWを保持し、ウエハWの位置ずれを補正する。
上記のステップD14で、離間距離LA〜LDがすべて適正値と判定された場合、保持体21が熱板21上に前進、昇降ピン16の下降による保持体21へのウエハWの受け渡しが順に行われ、保持体21により加熱モジュール1からウエハWが搬出される(ステップD16)。
上記の加熱モジュール1及び保持体21を含む塗布、現像装置によれば、ウエハWの周縁部の互いに異なる位置に超音波を照射するセンサ2A〜2Dが設けられ、超音波が照射される箇所とセンサ2A〜2Dとの離間距離LA〜LDを取得している。そして、この離間距離LA〜LDの経時的な推移のデータに基づいて、熱板12の載置領域R1及び当該載置領域R1の上方におけるウエハWの状態が正常であるか否か検出されるため、これら状態が正常か否かを精度高く検出することができる。
そして、載置領域R1における載置状態が異常であるウエハWについては、異常に加熱処理されたウエハWとして識別されるため、加熱処理後に異常の有無の検査を行う手間が省けることにより、スループットの向上を図ることができる。また、そのような異常なウエハWについても、昇降ピン16に異常が無い場合には、保持体21に受け渡されて加熱モジュール1から搬出される。従って、ユーザーが装置に立ち入ってこの異常なウエハWを回収する手間を省くことができる。また、カメラなどの比較的高価な機器を用いずに、熱板21の上方におけるウエハWの状態を監視することができるので、装置の製造コストを抑えることができるという利点もある。
また、この加熱モジュール1では、熱板12に載置される前のウエハWが昇降ピン16に支持された状態で、ウエハWの位置が正常であるか否かが離間距離LA〜LDに基づいて検出される。そして、正常では無いと判定されたときには、保持体21による位置の補正が行われる。従って、ウエハWに異常な処理が行われることを抑え、歩留りの低下を抑えることができる。さらに、加熱処理後のウエハWが昇降ピン16に支持された状態で、ウエハWの位置が正常であるか否かが離間距離LA〜LDに基づいて検出され、正常では無いと判定されたときには、保持体21による位置の補正が行われ、結果として保持体21の正常な位置にウエハWが受け渡される。従って、このウエハWを受け取った保持体21から当該ウエハWが落下して破損することを防ぐことができる。
ところで、このように昇降ピン上16におけるウエハWの位置を補正可能とすることによって、当該ウエハWの位置について異常が検出されても、この異常による装置の動作を停止させる必要は無い。従って、加熱モジュール1の動作が停止する頻度を抑えることができるので、装置のスループットの低下を防ぐことができる。
さらに、離間距離LA〜LDに基づいて昇降ピン16の破損の有無が判定され、破損していると判定された場合でも、支持されるウエハWの傾きの程度が比較的小さい場合には加熱モジュール1での処理が続行される。従って、不要に装置の動作を停止することが抑えられるので、このような点からも装置のスループットの低下を防ぐことができる。
センサ2A〜2Dは熱板21に埋設するように設けることに限られず、熱板21の表面上に設けてもよい。その場合、センサ2の高さが比較的大きいと、センサ2の上下で温度分布が形成されやすくなることで、ウエハWから見て、センサ2とその周囲とでは温度差が形成され、ウエハWの加熱時に当該ウエハWの面内温度がばらつくおそれがある。従って、図23に示すようにセンサ2A〜2D(図中では2A、2Bのみ表示)は薄膜状に構成することが好ましい。この薄膜状に構成されたセンサ2A〜2Dの高さHは、例えば0.05mm以下である。
また、一つのセンサ2から取得される信号に基づいて離間距離Lを求めることには限られない。例えば、互いに近接して一のセンサ2、他のセンサ2を配置する。つまり一のセンサ2と他のセンサ2とは、ウエハWの互いに近接した位置に、夫々超音波を照射する。互いに同じ高さのウエハWを計測したときに、一のセンサ2の出力信号電圧と他のセンサ2の出力信号電圧とは互いに異なるように設定しておく。そして、一のセンサの出力信号電圧と他のセンサの出力信号電圧との差分値を、離間距離Lとして監視する。このようにすることで、センサ2の温度ドリフトが相殺され、離間距離Lの検出精度を向上させることができる。
また、センサを設ける位置、数としては上記の例に限られない。図24では、上記のセンサ2A〜2Dに加えて、熱板12の中心部にセンサ2A〜2Dと同様に構成されたセンサ2Eを設けた例を示している。以下、センサ2Eにより取得されるセンサ2EとウエハWとの離間距離をLEとする。このようにセンサ2A〜2Eを設けることで、熱板12で加熱されるウエハWに反りが生じた場合、反りの方向と反りの程度とを検出することができる。反りの方向の検出とは、ウエハWの周縁部が中心部より高い上反りとなるか、ウエハWの中心部が周縁部より高い下反りとなるかを検出することである。反りの程度の検出とは、ウエハWの中心部と周縁部との高さの差を検出することである。
図25は上反りとなったウエハWの側面図であり、図26はそのようにウエハWが反ったことにより取得されるLA〜LEのタイミングチャートである。また、図27は、下反りとなったウエハWの側面図であり、図28はそのようにウエハWが反ったことにより取得されるLA〜LEのタイミングチャートである。このように反りの検出は、半導体製品となるウエハWについて行ってもよいし、モジュールでの各種の処理条件を設定するために加熱処理される半導体製品とはならない試験用のウエハWについて行ってもよい。
(第2の実施形態)
続いて、第2の実施形態に係る加熱モジュール4について、加熱モジュール1との差異点を中心に説明する。図29、図30は夫々加熱モジュール4の縦断側面図、平面図である。加熱モジュール4は、ウエハWが載置される水平な冷却板41を備えている。図中R2は、冷却板41におけるウエハWの載置領域である。冷却板41は図示しない冷媒の流路を備え、当該冷却板41に載置されたウエハWは所定の温度に調整される。熱板21による加熱後のウエハWが冷却板41に載置されると、当該ウエハWは冷却される。シャッタ23が開放された状態で、駆動機構42により冷却板41は熱板21上と熱板21の外側の待機位置(図29及び図30に示す位置)との間で、既述の±X方向に移動する。
図中43は昇降ピンであり、熱板21の外側に設けられ、昇降機構40により昇降する。待機位置における冷却板41と保持体21との間では、昇降ピン43によりウエハWが受け渡される。熱板21上に移動した冷却板41と熱板21との間では上記の昇降ピン16によりウエハWが受け渡される。図中44は冷却板41の表面に設けられる支持ピンであり、熱板21上の支持ピン14と同様に構成されており、冷却板41上に載置されたウエハWは、支持ピン44上に支持される。
また、冷却板41には、超音波センサ2A〜2Dと同様の構成の超音波センサ5A〜5Dが埋設されており、アンプ22を介して制御部3に接続されている。例えばセンサ5(5A〜5D)もセンサ2と同様にモジュール4の稼働中は常時、上方へ超音波を照射し続け、制御部3は超音波センサ5A〜5DとウエハWとの離間距離(RA〜RDとする)を取得し続ける。第1の実施形態で述べた離間距離LA〜LDに基づく載置領域R1に対するウエハWの位置ずれ方向の検出、当該位置ずれの補正及び熱板21上の異物Hの検出と同様に、制御部3は載置領域R2上対するウエハWの位置ずれの方向の検出、当該位置ずれの補正及び冷却板41上の異物Hの検出を、取得された離間距離RA〜RDに基づいて行うことができる。また、熱板21に置かれる前であればウエハWに形成されたレジスト膜は変質しないため、冷却板41に置かれたウエハWについて位置ずれが検出される場合は、昇降ピン43により冷却板41から当該ウエハWを上昇させて、保持体21により当該ウエハWの位置の補正を行うことができる。
加熱モジュール4の動作について、加熱モジュール1の動作との差異点を中心に説明する。ウエハWを保持した保持体21が前進し、待機位置に位置する冷却板41上に位置する。然る後、図21のステップD2〜D6と同様のステップが行われる。ただし、昇降ピン16の動作は昇降ピン43の動作であるものとし、ウエハWが載置される対象は熱板21の代わりに冷却板41であるものとして読み替える。従って、例えば昇降ピン43上において冷却板41の載置領域R2に対してウエハWが位置ずれしている場合には、この位置ずれが解消されるように保持体21による位置補正が行われる。ステップD6の昇降ピン43が下降してウエハWが冷却板41に載置されてからのフローを図31に示している。以下、この図31も参照しながら説明する。
ステップD6実行中に離間距離RA〜RDが取得され、第1の実施形態の離間距離LA〜LDと同様、この離間距離RA〜RDに基づいて距離減少時間T1A〜T1Dが算出される。また、時刻t12以降の離間距離RA〜RDが取得される。これら取得された各値が正常か否か、具体的には例えばT1A=T1B=T1C=T1D、且つ時刻t12以降でLA=LB=LC=LDとなっているか否かが判定される(ステップF1)。正常ではないと判定された場合、冷却板41上に異物Hが存在するか否か判定される。具体的には、T1A〜T1Dに大小関係が有り、且つ時刻t12以降のRA〜RDに大小関係が有るか否かが判定される(ステップF2)。異物Hが無いと判定された場合、昇降ピン43の下降中に搬送領域R2に対してウエハWが位置ずれしたか否かが判定される。具体的には例えば、センサ5のうち1つまたは2つのセンサがウエハWを検出していない状態であるか否かが判定される(ステップF3)。位置ずれしていないと判定された場合、センサ5に異常があるものと決定され(ステップF4)、加熱モジュール4の動作が停止する(ステップF5)
ステップF1で取得された各値が正常であると判定された場合は、冷却板41に載置されたウエハWには正常な冷却処理が行われたと決定され(ステップF6)、冷却板41が熱板21上へ前進する(ステップF7)。上記のステップF2で異物Hが存在すると判定された場合は、冷却板41に載置されたウエハWについて異常な冷却処理が行われたものとして決定され(ステップF8)、然る後、上記のステップF7が行われる。ステップF3でウエハWが位置ずれしたと判定された場合、昇降ピン43が上昇してウエハWを突き上げ(ステップF9)、対処動作が行われる(ステップF10)。
このステップF10の対処動作は図21、図22で説明したステップE群からなる対処動作D5と同様であるが、昇降ピン16の動作は昇降ピン43の動作であるものとし、ウエハWが載置される対象は熱板21の代わりに冷却板41であるものとして読み替える。ステップF10の対処動作でステップE5のウエハWの位置補正が行われるか、ステップE7で処理続行可能の判定が行われた場合は、昇降ピン43が下降してウエハWが再度、冷却板41上に載置される(ステップF11)。以降はステップF7の動作が行われて、ウエハWが載置された冷却板41が前進する。
ステップF7が行われてウエハWが載置された冷却板41が熱板21上に移動すると、昇降ピン16が上昇してウエハWを支持し(ステップF12)、冷却板41が待機位置へ後退する(ステップF13)。然る後、第1の実施形態のステップD4と同様に、センサ2で検出される離間距離LA〜LDが適正値であるか否か判定され(ステップF14)、適正値であると判定された場合、昇降ピン16が下降し、ウエハWが熱板21に載置される(ステップF15)。以降、第1の実施形態で説明したステップD7〜D12の動作が行われ、正常にウエハWが載置されて、熱処理が行われたか否かが判定される。
ステップF14で適正値では無いとは安定された場合、対処動作が行われる(ステップF16)。このステップF16の対処動作は、図22のステップE群からなる対処動作と概ね同様に行われるが、差異点としてステップE1で位置ずれがあると判定された場合は、冷却板41が熱板21上に移動し、昇降ピン16が下降した後、冷却板41が待機位置へ戻る。その後、既述のステップF9以降の各ステップが行われる。
続いて、熱板21から冷却板41を介してウエハWを保持体21に受け渡すときの動作を、図32のフローを参照しながら説明する。先ず、昇降ピン16が上昇してウエハWを突き上げ(ステップG1)、第1の実施形態のステップD14と同様に、取得された離間距離LA〜LDが適正値であるか否か判定される(ステップG2)。適正値では無いと判定された場合、対処動作が行われる(ステップG3)。このステップG3の対処動作は、図22で説明したステップD5の対処動作と異なり、ステップE1が行われず、ステップE2の昇降ピン16の異常の判定から開始される。このような差異点を除いてステップG3の対処動作は、ステップD5の対処動作と同様のステップE群により構成され、ステップE7で処理が続行可能と判定された場合は、後述のステップG4に進む。
ステップG2で離間距離LA〜LDが適正値であると判定された場合、冷却板41が熱板21上に移動し(ステップG4)、昇降ピン16が下降して冷却板41にウエハWが受け渡される(ステップG5)。そして冷却板41が待機位置に後退移動し(ステップG6)、昇降ピン43が上昇してウエハWを突き上げ、離間距離RA〜RDが上昇後する(ステップG7)。その後、昇降ピン43の上昇が停止し、離間距離RA〜RDが一定となる。
そして、第1の実施形態のステップD14と同様に離間距離RA〜RDが適正値か否か判定される(ステップG8)。適正では無いと判定された場合は対処動作が行われる(ステップG9)。このステップG9の対処動作は、図22のステップE群からなる対処動作と同様である。そして、このステップG9の対処動作で、ステップE5のウエハWの位置補正が行われるか、ステップE7で処理続行可能の判定が行われた場合は、後述のステップG10が行われる。ステップG8にて、各値が適正と判定された場合は、保持体21のウエハW下方への前進、昇降ピン16の下降による保持体21へのウエハWの受け渡し、保持体21による加熱モジュール4からのウエハWの搬出が行われる(ステップG10)。
この第2の実施形態についても、第1の実施形態と同様の効果が得られる。また、第2の実施形態では、保持体21の移動路(ウエハWの搬送領域)から見て、比較的大きく離れた位置に熱板21が設けられる。そのため上記の移動路にカメラなどを設けても、熱板21の表面状態を観察することが難しいため、既述したように超音波センサ2でウエハWの状態を検出することが特に有効である。
ところで、図33、図34に示すように昇降ピン43が下降して冷却板41の載置領域R2に向けてウエハWが下降中、昇降ピン43上のウエハWの位置が−X方向にずれて、センサ5B、5DがウエハWを検出不可になるとする。このように5B、5DのウエハWが検出不可になったときは、そのようにウエハWの−X方向への位置ずれが起きたものと判定し、例えば昇降ピン43の下降に並行して、冷却板41を−X方向に移動させる。そして、センサ5A〜5Dの全てによりウエハWが検出可能な位置で冷却板41を静止させ、図35に示すようにウエハWが載置領域R2に載置されるようにしてもよい。センサ5B、5Dの代わりに5A、5CがウエハWを検出不可になった場合は、−X方向の位置ずれの代わりに+X方向の位置ずれが起きたものと判定し、冷却板41は+X方向に移動させる。また、そのように冷却板41の位置補正を行うにあたり、昇降ピン43の下降と並行して冷却板41の移動を行うことには限られず、位置ずれが起きたと判定されたら昇降ピン43の下降を停止させ、この停止中に冷却板41の位置補正を行うようにしてもよい。
(第3の実施形態)
第3の実施形態では、図36、図37に示すように保持体21に超音波センサ2、5と同様に構成される超音波センサ6(6A〜6D)が設けられている。センサ6A〜6Dは、保持体21の内周側面に既述のセンサ2、5と同様にマトリクス状に配置され、上方に超音波を照射する。この保持体21が、上昇した加熱モジュール1の昇降ピン16に支持されるウエハWを受け取るときの動作について説明する。先ず、保持体21が熱板21の外方から熱板21上へ前進し、当該ウエハWの下方に位置する。このときセンサ6A〜6DのうちウエハWを検出できないセンサがある場合には、その検出できないセンサに応じた方向に保持体21が所定量移動され、ウエハWに対する保持体21の位置が補正される。所定量の移動後、依然としてウエハWを検出できないセンサがある場合は、そのセンサに応じた方向にさらに所定量、保持体21が移動される。
図36、図37ではセンサ6A、6BによりウエハWが検出できない状態を示しており、図38、図39では、図32、33の状態から+X方向に保持体21を移動させてウエハWに対する位置を補正した例を示している。図40のタイミングチャートは、そのように補正を行ったときに取得されるウエハWとセンサ6A〜6Dとの離間距離(MA〜MDとしている)の経時変化を示している。チャート中の時刻t31は、保持体21が図36、37の位置にある状態、時刻t32は保持体21が図38、39の位置に移動した状態を示している。
全てのセンサ6によりウエハWが検出可能になると、保持体21が上昇し(時刻t33)、離間距離MA〜MDは減少する。そして保持体21によりウエハWが保持されると、離間距離MA〜MDは一定となる(時刻t34)。その後、保持体21は、加熱モジュール1の後段のモジュールに移動し、例えばそのモジュールの昇降ピンにより、保持されたウエハWが保持体21から突き上げられて離間距離MA〜MDが上昇し(時刻t35)、昇降ピンが上昇しきると離間距離MA〜MDの上昇が停止する(時刻t36)。然る後、後段のモジュールから保持体21が後退して退避し、各センサ6はウエハWを検出不可となる。
この第3の実施形態によれば、保持体21が異常な位置でウエハWを受け取ることを防ぐことができるため、保持体21によるウエハWの搬送中、当該保持体21からのウエハWの落下を防ぐことができる。従って、この落下によるウエハWの破損や、落下したウエハWを回収するために装置を停止する事態になることを防ぐことができる。
上記の加熱モジュール4が適用される塗布、現像装置の一例を図41〜図43を用いて例示する。ただし、加熱モジュール4の代わりに加熱モジュール1が適用されてもよい。図41、42、43は夫々当該塗布、現像装置7の平面図、斜視図、概略縦断側面図である。この塗布、現像装置7は、キャリアブロックK1と、処理ブロックK2と、インターフェイスブロックK3と、を直線状に接続して構成されている。インターフェイスブロックK3に前記露光装置K4が接続されている。以降の説明ではブロックK1〜K3の配列方向を前後方向とする。キャリアブロックK1は、キャリアCを塗布、現像装置1内に対して搬入出し、キャリアCの載置台71と、開閉部72と、開閉部72を介してキャリアCからウエハWを搬送するための移載機構73とを備えている。
処理ブロックK2は、ウエハWに液処理を行う第1〜第6の単位ブロックL1〜E6が下から順に積層されて構成されている。説明の便宜上ウエハWに下層側の反射防止膜を形成する処理を「BCT」、ウエハWにレジスト膜を形成する処理を「COT」、露光後のウエハWにレジストパターンを形成するための処理を「DEV」と夫々表現する場合がある。この例では、図42に示すように下からBCT層、COT層、DEV層が2層ずつ積み上げられている。同じ単位ブロックにおいて互いに並行してウエハWの搬送及び処理が行われる。
ここでは単位ブロックのうち代表してCOT層L3を、図41を参照しながら説明する。キャリアブロックK1からインターフェイスブロックK3へ向かう搬送領域74の左右の一方側には棚ユニットUが前後方向に複数配置され、他方側には液処理モジュールであるレジスト塗布モジュール81、保護膜形成モジュール82が前後方向に並べて設けられている。レジスト塗布モジュール81はウエハWの表面にレジストを供給して、レジスト膜を形成する。保護膜形成モジュール82は、レジスト膜上に所定の処理液を供給し、当該レジスト膜を保護する保護膜を形成する。棚ユニットUは、上記の加熱モジュール4を備えている。前記搬送領域74には、ウエハWの搬送機構M3が設けられており、この搬送機構M3が上記の保持体21を備えている。
COT層L4はCOT層L3と同様に構成されており、レジスト塗布モジュールとして、2Aの代わりに2Bが設けられている。他の単位ブロックL1、L2、L5及びL6は、ウエハWに供給する薬液が異なることを除き、単位ブロックL3、L4と同様に構成される。単位ブロックL1、L2は、レジスト塗布モジュール81、82の代わりに反射防止膜形成モジュールを備え、単位ブロックL5、L6は、現像モジュールを備える。図43では各単位ブロックL1〜L6の搬送機構はM1〜M6として示している。
処理ブロックK2におけるキャリアブロックK1側には、各単位ブロックL1〜E6に跨って上下に伸びるタワーT1と、タワーT1に対してウエハWの受け渡しを行うための昇降自在な受け渡し機構である受け渡しアーム75とが設けられている。タワーT1は互いに積層された複数のモジュールにより構成されており、単位ブロックL1〜L6の各高さに設けられるモジュールは、当該単位ブロックL1〜L6の各搬送機構M1〜M6との間でウエハWを受け渡すことができる。これらのモジュールとしては、各単位ブロックの高さ位置に設けられた受け渡しモジュールTRS、ウエハWの温度調整を行う温調モジュールCPL、複数枚のウエハWを一時的に保管するバッファモジュール、及びウエハWの表面を疎水化する疎水化処理モジュールなどが含まれている。説明を簡素化するために、前記疎水化処理モジュール、温調モジュール、前記バッファモジュールについての図示は省略している。
インターフェイスブロックK3は、単位ブロックL1〜L6に跨って上下に伸びるタワーT2、T3、T4を備えており、タワーT2とタワーT3に対してウエハWの受け渡しを行うための昇降自在な受け渡し機構であるインターフェイスアーム76と、タワーT2とタワーT4に対してウエハWの受け渡しを行うための昇降自在な受け渡し機構であるインターフェイスアーム77と、タワーT2と露光装置K4の間でウエハWの受け渡しを行うためのインターフェイスアーム78が設けられている。
タワーT2は、受け渡しモジュールTRS、露光処理前の複数枚のウエハWを格納して滞留させるバッファモジュール、露光処理後の複数枚のウエハWを格納するバッファモジュール、及びウエハWの温度調整を行う温調モジュールなどが互いに積層されて構成されているが、ここでは、バッファモジュール及び温調モジュールの図示は省略する。この塗布、現像装置1においては、ウエハWが載置される場所をモジュールと記載する。なお、タワーT3、T4にも夫々モジュールが設けられているが、ここでは説明を省略する。
この塗布、現像装置7及び露光装置K4からなるウエハWの搬送経路について説明する。ウエハWは、キャリアCから移載機構73により、処理ブロックK2におけるタワーT1の受け渡しモジュールTRS0に搬送される。この受け渡しモジュールTRS0からウエハWは、単位ブロックL1、L2に振り分けられて搬送される。例えばウエハWを単位ブロックL1に受け渡す場合には、タワーT1の受け渡しモジュールTRSのうち、単位ブロックL1に対応する受け渡しモジュールTRS1(搬送アームF1によりウエハWの受け渡しが可能な受け渡しモジュール)に対して、前記TRS0からウエハWが受け渡される。またウエハWを単位ブロックL2に受け渡す場合には、タワーT1の受け渡しモジュールTRSのうち、単位ブロックL2に対応する受け渡しモジュールTRS2に対して、前記TRS0からウエハWが受け渡される。これらのウエハWの受け渡しは、受け渡しアーム75により行われる。
このように振り分けられたウエハWは、TRS1(TRS2)→反射防止膜形成モジュール→加熱モジュール4→TRS1(TRS2)の順に搬送され、続いて受け渡しアーム75により単位ブロックL3に対応する受け渡しモジュールTRS3と、単位ブロックL4に対応する受け渡しモジュールTRS4とに振り分けられる。
このようにTRS3、TRS4に振り分けられたウエハWは、TRS3(TRS4)→レジスト塗布モジュール81→加熱モジュール4→保護膜形成モジュール82→加熱モジュール4→タワーT2の受け渡しモジュールTRSの順で搬送される。然る後、このウエハWは、インターフェイスアーム76、78により、タワーT3を介して露光装置K4へ搬入される。露光後のウエハWは、インターフェイスアーム77によりタワーT2、T4間を搬送されて、単位ブロックL5、L6に対応するタワーT2の受け渡しモジュールTRS5、TRS6に夫々搬送される。然る後、加熱モジュール4→現像モジュール→加熱モジュール4→受け渡しモジュールTRSに搬送された後、移載機構73を介してキャリアCに戻される。
既述の各実施形態で示した例は、互いに組み合わせることができる。また、加熱モジュール及び保持体に超音波センサを設け、ウエハWの位置を監視する例を説明したが、設ける箇所はそれらに限られない。例えば、ウエハWに各種の液処理を行うためのレジスト塗布モジュール81や保護膜形成モジュール82に超音波センサを設けてウエハWの位置を監視してもよい。また、モジュール間でウエハWを受け渡すために、当該ウエハWが仮置きされる上記の受け渡しモジュールTRSに超音波センサを設けてウエハWの位置を監視してもよい。また、本発明は、上記の塗布、現像装置に適用することに限られず、ウエハWの搬送機構と、絶縁膜形成用の薬液や、洗浄液などをウエハWに供給する液処理モジュールとを備えた基板処理装置に適用してもよいし、ウエハWの搬送機構とウエハWにドライエッチングを行うモジュールとを備えた基板処理装置に適用してもよいし、ウエハWの搬送機構とALD(Atomic Layer Deposition)やCVD(Chemical Vapor deposition)を行う成膜モジュールとを備えた基板処理装置に適用してもよい。
また、昇降ピンに支持されたウエハWを熱板13に載置するにあたり、昇降ピンは昇降せずに熱板12を昇降機構により上昇させてウエハWを熱板12に載置し、このときの離間距離Lに基づいてウエハWの載置状態の異常を判定してもよい。