JP2016210544A - 画像形成装置 - Google Patents
画像形成装置 Download PDFInfo
- Publication number
- JP2016210544A JP2016210544A JP2015094147A JP2015094147A JP2016210544A JP 2016210544 A JP2016210544 A JP 2016210544A JP 2015094147 A JP2015094147 A JP 2015094147A JP 2015094147 A JP2015094147 A JP 2015094147A JP 2016210544 A JP2016210544 A JP 2016210544A
- Authority
- JP
- Japan
- Prior art keywords
- paper
- recording material
- unit
- paper feed
- image forming
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Paper Feeding For Electrophotography (AREA)
- Manual Feeding Of Sheets (AREA)
- Sheets, Magazines, And Separation Thereof (AREA)
Abstract
Description
<画像形成システムの概略構成>
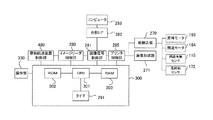
図1は、本実施の形態の画像形成装置の断面図、図2は、本実施の形態の画像形成装置のブロック図である。図1、図2を用いて、基本的な構成を説明する。
図2の制御部300は、図1の画像形成装置のシステム制御を行っており、CPU301、ROM302、RAM303とタイマ291を有している。制御手段であるCPU301は画像形成装置のシステム制御を行うCPUである。CPU301には、制御プログラムが書き込まれたROM302と、制御に用いる変数や図1のイメージセンサ233によって読み取られた画像データを保存するRAM303が、アドレスバスとデータバスにより接続されている。また、時間を計測することが可能なタイマ291がCPU301に接続されており、CPU301はタイマ291のタイムカウント値の設定やタイマ計測値の取得を行う。CPU301は、原稿給送装置制御部480を介して、原稿搬送ローラ112の駆動や、原稿有無センサ151による原稿有無検知などを行う。また、CPU301は、イメージリーダ制御部280を介して、原稿圧板の開閉動作の検知や原稿圧板ガラス板55上の原稿画像、原稿給送装置制御部480によって給送された原稿画像をイメージセンサ233により読み取る。イメージセンサ233は、読み取った原稿画像の情報を、アナログ画像信号としてCPU301に出力する。CPU301は、イメージセンサ233から入力されたアナログ画像信号を、画像信号制御部281に転送する。
次に図1及び図2を用いて、基本的な画像形成動作について説明する。CPU301は、用紙有無センサ115によって給紙トレイ111へ用紙が載置されたことを検知すると、操作部330に用紙サイズ選択画面を表示させる。ユーザによって用紙サイズが選択、確定されると、CPU301は、給紙ピックアップローラ113の下降動作によって、給紙ピックアップローラ113の位置を、「給紙ピックアップローラ当接位置」に移動させる。ここで、「給紙ピックアップローラ当接位置」とは、給紙ピックアップローラ113が、給紙トレイ111上に載置された用紙に当接して用紙を給紙できる位置をいう。給紙ピックアップローラ113は、給紙トレイ111に積載された用紙に当接した第一の状態となる。
次に、本実施の形態の給紙ピックアップローラ113の昇降機構について説明する。
まず、図3を用いて本実施の形態の給紙トレイ111上の用紙検知構成について説明する。図3(a)は、給紙トレイ111近傍の断面図である。給紙トレイ111の給紙ローラ114が設置されている側の端部には、用紙有無フラグ411が配置されている。用紙有無フラグ411は、例えば、本実施の形態では、用紙Pの搬送方向に直交する方向の中央部に配置されている。用紙有無センサ115は、例えば、光学式のセンサである。図3(a)に示すように、給紙トレイ111上に用紙Pが載置されると、用紙有無フラグ411は、用紙Pの搬送方向における先端部によって押され、用紙有無フラグ411が用紙有無センサ115を遮光する。このとき、例えば、用紙有無センサ115は、ON信号を出力する。
図4(a)は、本実施の形態の操作部330の正面図である。操作部330には、コピー動作を開始するためのスタートキー306、コピー動作を中断するためのストップキー307、置数設定等を行うテンキー313等が配置されている。また、操作部330の左側にはタッチパネルが形成された表示部311が配置されており、画面上には、ソフトウェア的なキーであるソフトキーを作成することが可能となっている。また、CPU301は、置数設定等を行うテンキー313等への操作に応じて、プリント準備動作の制御を実施する。
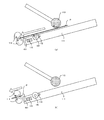
図5は、本実施の形態の給紙ピックアップローラ113の昇降動作を説明する図である。図5(a)は、手差し給紙部の給紙ピックアップローラ113と、給紙ピックアップローラ113を支える給紙アーム160を上方からみた投影図である。給紙ピックアップローラ113は、給紙ピックアップローラ軸161を介して給紙アーム160によって支持されている。給紙アーム軸162は、給紙アーム160に固定されており、昇降モータ163の駆動が、不図示のカムを介して伝達されるように構成されている。
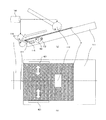
次に、本実施の形態の給紙トレイ111の用紙有無検知方法について、図6を用いて説明を行う。図6(a)は、給紙を行っているときの給紙トレイ111の状態を示す断面図であり、図中の用紙Pは、給紙トレイ111に積載された最終紙である。図6(a)では、給紙ピックアップローラ113が図中矢印方向(時計回り方向)に回転することにより、用紙Pが給紙ローラ114へと搬送される。前述したように、用紙有無センサ115は、例えば光学式のセンサである。搬送される用紙Pが用紙有無フラグ411の一方の端部を倒すことにより、用紙有無フラグ411の他端が用紙有無センサ115を遮光し、これにより、用紙有無センサ115は、給紙トレイ111上に用紙が有ることを検知する。このとき、例えば用紙有無センサ115は、ON信号を出力する。
次に、本実施の形態の給紙トレイ111の最終紙検知方法について、図7を用いて説明を行う。図7(a)は、前述した図6(a)と同様の、最終紙の給紙を行っているときの給紙トレイ111の状態を示す断面図であり、図中の用紙Pは、給紙トレイ111に積載された最終紙である。図7(a)でも、図6(a)と同様に、給紙ピックアップローラ113が図中矢印方向(時計回り方向)に回転することにより、用紙Pが給紙ローラ114へと搬送される。搬送される用紙Pが用紙有無フラグ411を倒すことにより、用紙有無センサ115は、給紙トレイ111上に用紙が有ることを検知している。
次に、図8、図9と用いて、給紙トレイ111の給紙ピックアップローラ113の制御シーケンスについて説明する。図8は、プリントジョブの実行に伴う給紙ピックアップローラ113に関連したCPU301の制御処理を説明するフローチャートであり、CPU301は、図8に示す処理を常に行っているものとする。
図9は、給紙ピックアップローラ113の昇降制御についてのCPU301の制御シーケンスを示すフローチャートである。図9(a)は、図8のS1005の「給紙ピックアップローラ下降制御実行」を説明するフローチャートであり、図9(b)は、図8のS1008の「給紙ピックアップローラ上昇制御実行」を説明するフローチャートである。
図10は、給紙トレイ111の給紙ピックアップローラ113の制御について、本実施の形態と従来技術との時間について効果を比較したタイミングチャートである。図10において、(i)は、用紙有無センサ115の検知状態を示しており、ONは給紙トレイ上に用紙Pが積載されていること(用紙有り)を、OFFは給紙トレイ上に用紙Pが積載されていないこと(用紙無し)を示している。(ii)、(iii)は、それぞれ最終紙センサ172のコロ部材180のスリットの検知状態、最終紙センサ172の検知結果に基づく最終紙判断を示している。(ii)、(iii)の見方については、図7(c)と同様であり、ここでの説明は省略する。(iv)は、昇降モータ163の駆動状態を示しており、ONは昇降モータ163が駆動中を示し、OFFは昇降モータ163が停止中を示す。(v)は、給紙ピックアップローラ113の位置(離間位置、当接位置)を示している。
113 給紙ピックアップローラ
163 昇降モータ
172 最終紙センサ
301 CPU
Claims (12)
- 記録材が積載される積載部と、
前記積載部に積載された記録材を搬送路に給紙する給紙手段と、
前記給紙手段が前記積載部に積載された記録材に当接した第一の状態と、前記給紙手段が前記積載部に積載された記録材から離間した第二の状態を変更する変更手段と、
前記変更手段を制御する制御手段と、
前記給紙手段により前記積載部に積載された最終の記録材が給送中であることを検知する第一の検知手段と、
を備え、
前記制御手段は、前記第一の検知手段が前記最終の記録材が給送中であることを検知すると、前記変更手段を制御して前記第一の状態から前記第二の状態に変更することを特徴とする画像形成装置。 - 前記変更手段は、前記第一の状態と前記第二の状態の間で、前記給紙手段を昇降させる駆動手段であることを特徴とする請求項1に記載の画像形成装置。
- 前記変更手段は、前記給紙手段が前記第一の状態又は前記第二の状態となるように、前記積載部を昇降させる駆動手段であることを特徴とする請求項1に記載の画像形成装置。
- 前記積載部に記録材が積載されていることを検知する第二の検知手段を備え、
前記第二の検知手段は、前記積載部の記録材の搬送方向で前記第一の検知手段よりも下流側に配置されていることを特徴とする請求項1乃至3のいずれか1項に画像形成装置。 - 前記第二の検知手段は、前記最終の記録材の後端が通過すると前記積載部に記録材がないことを検知することを特徴とする請求項4に記載の画像形成装置。
- 前記第一の検知手段は、前記第二の検知手段が記録材を検知していても前記最終の記録材が搬送中であることを検知することを特徴とする請求項4又は5に画像形成装置。
- 前記給紙手段は、前記積載部の記録材を搬送するために記録材を挟持する給紙ローラを有し、
前記給紙ローラは、前記第二の検知手段の記録材の搬送方向の下流側に配置され、
前記制御手段は、前記最終の記録材が前記給紙ローラに挟持されると、前記変更手段を制御して前記第一の状態から前記第二の状態に変更することを特徴とする請求項4乃至6のいずれか1項に記載の画像形成装置。 - 前記最終の記録材は、前記最終の記録材の後端が前記第二の検知手段を通過する前に、前記給紙ローラに挟持されることを特徴とする請求項7に記載の画像形成装置。
- 前記第一の検知手段は、前記最終の記録材に当接し前記最終の記録材が前記給紙手段により搬送されるのに伴い回転する回転部材を有し、
前記第一の検知手段は、前記回転部材が所定の角度を回転すると、前記最終の記録材が給送中であることを検知することを特徴とする請求項4乃至8のいずれか1項に記載の画像形成装置。 - 前記回転部材は、光を透過する複数のスリットを有し、
前記第一の検知手段は、前記スリットを通過した光を所定のスリット分、検知すると、前記回転部材が所定の角度を回転したと検知することを特徴とする請求項9に記載の画像形成装置。 - 前記回転部材は、前記給紙手段が当接する前記最終の記録材の面とは反対側の面に当接することを特徴とする請求項9又は10に記載の画像形成装置。
- 前記制御手段は、前記第二の検知手段が前記積載部に記録材が積載されたことを検知すると、前記変更手段を制御して、前記第二の状態から前記第一の状態に変更することを特徴とする請求項4乃至11のいずれか1項に記載の画像形成装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015094147A JP6632217B2 (ja) | 2015-05-01 | 2015-05-01 | 画像形成装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015094147A JP6632217B2 (ja) | 2015-05-01 | 2015-05-01 | 画像形成装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016210544A true JP2016210544A (ja) | 2016-12-15 |
| JP2016210544A5 JP2016210544A5 (ja) | 2018-06-07 |
| JP6632217B2 JP6632217B2 (ja) | 2020-01-22 |
Family
ID=57549312
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015094147A Expired - Fee Related JP6632217B2 (ja) | 2015-05-01 | 2015-05-01 | 画像形成装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6632217B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019011176A (ja) * | 2017-06-30 | 2019-01-24 | キヤノン株式会社 | 画像形成装置 |
| JP7446839B2 (ja) | 2020-02-05 | 2024-03-11 | キヤノン株式会社 | シート給送装置、シート給送装置を備えたシート読取装置、シート読取装置を備えた画像形成装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5652765A (en) * | 1979-10-08 | 1981-05-12 | Canon Inc | Cut sheet feeder |
| JPS6023146U (ja) * | 1983-07-22 | 1985-02-16 | 日本電気株式会社 | 自動給紙装置 |
| JP2002308466A (ja) * | 2001-04-17 | 2002-10-23 | Canon Inc | 給送装置及び画像形成装置 |
| JP2006335554A (ja) * | 2005-06-06 | 2006-12-14 | Sharp Corp | 給紙装置 |
| JP2010143693A (ja) * | 2008-12-17 | 2010-07-01 | Canon Inc | センサ機構及びシート給送装置及び画像形成装置 |
-
2015
- 2015-05-01 JP JP2015094147A patent/JP6632217B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5652765A (en) * | 1979-10-08 | 1981-05-12 | Canon Inc | Cut sheet feeder |
| JPS6023146U (ja) * | 1983-07-22 | 1985-02-16 | 日本電気株式会社 | 自動給紙装置 |
| JP2002308466A (ja) * | 2001-04-17 | 2002-10-23 | Canon Inc | 給送装置及び画像形成装置 |
| JP2006335554A (ja) * | 2005-06-06 | 2006-12-14 | Sharp Corp | 給紙装置 |
| JP2010143693A (ja) * | 2008-12-17 | 2010-07-01 | Canon Inc | センサ機構及びシート給送装置及び画像形成装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019011176A (ja) * | 2017-06-30 | 2019-01-24 | キヤノン株式会社 | 画像形成装置 |
| JP7446839B2 (ja) | 2020-02-05 | 2024-03-11 | キヤノン株式会社 | シート給送装置、シート給送装置を備えたシート読取装置、シート読取装置を備えた画像形成装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6632217B2 (ja) | 2020-01-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6645698B2 (ja) | 画像形成装置 | |
| JP5072439B2 (ja) | 画像形成装置 | |
| US9815646B2 (en) | Image forming apparatus | |
| JP6669381B2 (ja) | 画像形成装置、画像形成方法及び給紙装置 | |
| US20190196381A1 (en) | Image forming apparatus, and method for controlling the same | |
| JP2010064805A (ja) | 給紙装置及びこれを備えた画像形成装置 | |
| JP6632217B2 (ja) | 画像形成装置 | |
| JP5743494B2 (ja) | 記録材供給装置、及び画像形成装置 | |
| JP2015131699A (ja) | シート給送装置及び画像形成装置 | |
| JP2015192224A (ja) | シート検出装置の検査方法、シート検出装置、画像処理装置、検査装置 | |
| JP7131129B2 (ja) | 画像形成装置、プログラム及び寿命判断方法 | |
| JP2009179445A (ja) | 画像形成装置 | |
| JP6775918B2 (ja) | 画像形成装置 | |
| JP6579797B2 (ja) | 画像形成装置 | |
| JP2007223743A (ja) | 給紙制御装置及び画像形成装置 | |
| JP2020045225A (ja) | 画像形成装置およびシート給紙装置 | |
| JP7400277B2 (ja) | 送出装置、画像形成装置、制御装置及び制御プログラム | |
| JP2016160037A (ja) | 画像形成装置 | |
| US20240174472A1 (en) | Paper feeder and image forming apparatus | |
| JP7163680B2 (ja) | 給紙装置、画像形成装置、引き出し規制方法 | |
| JP7387989B2 (ja) | 画像形成装置、シートの搬送制御方法及びプログラム | |
| JP2017058408A (ja) | 画像形成装置 | |
| JP2007131414A (ja) | 画像形成装置 | |
| JP2021091512A (ja) | 給紙装置、画像形成装置および画像読取装置 | |
| JP6144219B2 (ja) | 原稿搬送装置及び画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20160215 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20160215 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20171201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180413 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180413 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190312 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190510 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190806 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191007 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191210 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6632217 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |