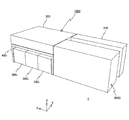
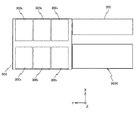
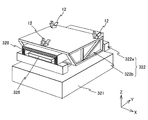
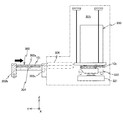
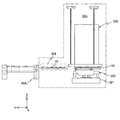
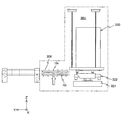
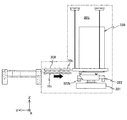
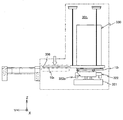
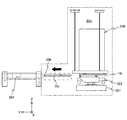
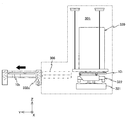
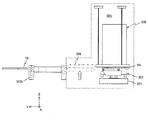
以下、一実施形態について、図1〜図27に基づいて、説明する。図1〜図2(B)には、一実施形態に係る露光システム1000が、レジスト塗布・現像装置(コータ・デベロッパ(以下、C/Dと略記する))9000とともに、異なる方向から見て斜視図にてそれぞれ示されている。また、図3には、露光システム1000が、C/D9000とともに、平面図にて示されている。
本実施形態では、荷電粒子ビームの一例として、電子ビームを用いた構成について説明する。但し、荷電粒子ビームは、電子ビームに限るものではなく、イオンビーム等の荷電粒子を用いたビームでも構わない。
本実施形態では、後述するように複数の電子ビーム光学系が設けられているので、以下、各電子ビーム光学系の光軸に平行にZ軸を取り、Z軸に垂直な平面(本実施形態では床面Fと平行な面である)内に互いに直交するY軸及びX軸を取って説明する。
露光システム1000は、図1〜図3に示されるように、床面F上に設置された直方体状のC/D9000に対向して+X側に所定間隔を隔てて配置された直方体状の第1制御ラック200と、C/D9000及び第1制御ラック200の+Y側に配置された複数、例えば6つのチャンバ3001〜3006と、6つのチャンバ3001〜3006が配置されたスペースの4つのコーナーに位置する4本の脚部を有するフレーム400と、フレーム400上に配置された第2制御ラック500と、を備えている。
6つのチャンバ3001〜3006は、3つのチャンバ3001〜3003と、3つのチャンバ3004〜3006とから成る2列に分かれている。
3つのチャンバ3001〜3003は、互いにX軸方向(後述するチャンバ3001とC/D9000とが隣接する方向)に所定間隔を隔てて配置され、また、3つのチャンバ3001〜3003は、互いにX軸方向(後述するチャンバ3004と第1制御ラック200とが隣接する方向)に所定間隔を隔てて配置される。
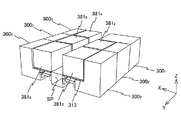
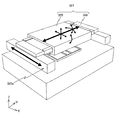
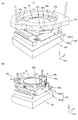
図1に示されるチャンバ3001〜3003が一方の列に含まれ、図2(A)に示されるチャンバ3004〜3006が他方の列に含まれている。図3の平面図に示されるように、一方の列のチャンバ3001〜3003は、C/D9000の+Y側に隣接してY軸方向に並んで配置されている。他方の列のチャンバ3004〜3006は、第1制御ラック200の+Y側に隣接してY軸方向に並んで配置されている。本実施形態では、露光システム1000のうち、第1制御ラック200、フレーム400及び第2制御ラック500を取り除いた部分を示す図4及び図3からわかるように、チャンバ3001と3004が対向し、チャンバ3002と3005が対向し、チャンバ3003とチャンバ3006とが対向している。
言い換えると、6つのチャンバ3001〜3006のうち、チャンバ3001は、C/D9000に対して、C/D9000が延びる方向に隣接して配置される。
また、6つのチャンバ3001〜3006のうち、チャンバ3004は、チャンバ3001とC/D9000とが隣接する方向に対して交差する方向に、かつチャンバ3001に対して所定間隔を隔てて配置される。すなわち、チャンバ3004とチャンバ3001とは、対向して配置される。
そして、第1制御ラック200は、チャンバ3004とC/D9000とにそれぞれ所定間隔を隔てて配置される。すなわち、チャンバ3004は、第1制御ラック200に対して、第1制御ラック200が延びる方向に隣接して配置され、C/D9000は、第1制御ラック200に対向して配置される。
第1制御ラック200として、C/D9000と同じ長さ且つ同じ高さを有する直方体状のものが用いられている。また、6つのチャンバ3001〜3006の高さは、第1制御ラック200及びC/D9000の高さよりも低く構成したため、6つのチャンバ3001〜3006の上方に、空きスペースが存在する。そこで、本実施形態では、この空きスペースを有効活用すべく、第2制御ラック500が、フレーム400を介して配置されている。すなわち、フレーム400は、矩形の天板部とこの天板部を、その4つのコーナー部分で支持する4本の同一長さの脚部とを有し、第2制御ラック500を下方から支持している。第2制御ラック500の上面と、第1制御ラック200及びC/D9000の上面とは、ほぼ同一面となっている。
このようなレイアウトにより、本実施形態では、クリーンルーム内に直方体状のスペースを作ることができ、クリーンルーム内に使い勝手が悪い空間が生じるのを回避して、空間の利用効率の向上を図ることが可能である。
第1制御ラック200には、床面Fの下にある、生産支援機器やユーティリティ設備が収容されたクリーンルームサブファブのユーティリティ供給源からの配線及び配管が床面Fを介して下側から接続されている(図2(A)中の上向きの3本の黒矢印参照)。また、第1制御ラック200は、配線及び配管を介して第2制御ラック500に接続されている。配線及び配管は、電力等のユーティリティ(用役、用力)を供給するもので、ユーティリティには、電力の他に、空気、冷却水、真空排気などが含まれる。
第1制御ラック200の内部には、例えば高電圧電源、及びアンプなどの電子ビーム露光装置に直接関係する制御系ユニット、後述するステージの制御系、及び後述する計測系の制御基板等の様々なユニットが収納されている。第1制御ラック200は、配線及び配管を一旦中継し、クリーンルームサブファブのユーティリティ供給源から配線及び配管(供給部材)を介して供給されたユーティリティを6つのチャンバ3001〜3006に分配するため(図2(A)中の白抜き矢印参照)、第2制御ラック500に供給する。なお、必要に応じ、第1制御ラック200の内部に、冷却水の温調機を配置しても良い。
第2制御ラック500の内部にも、第1制御ラックと同様、様々なユニットが、収容され、配線及び配管を介して6つのチャンバ3001〜3006のそれぞれに接続されている。第2制御ラック500は、6つのチャンバ3001〜3006のそれぞれに対して、第1制御ラック200から供給されたユーティリティを上方から供給する(図2(A)中の下向きの3本の黒矢印参照)。すなわち、第2制御ラック500は、第1制御ラック200と6つのチャンバ3001〜3006とのインターフェースとして機能する。なお、6つのチャンバ3001〜3006のそれぞれに対して、ユーティリティを上方から供給するメリットについては、後述する。
6つのチャンバ3001〜3006のうち、C/D9000に隣接して配置されたチャンバ3001は、直方体形状を有している(図4参照)。チャンバ3001は、C/D9000にインラインにて接続されている。チャンバ3001の内部空間は、ターゲットであるウエハ(C/D9000によって電子線レジストが塗布されたウエハ)に対する所定の計測、及び後述するウエハシャトルに対する露光前のウエハのロード及び露光済みのウエハのアンロードが行われる、計測室(計測セル)60(図1〜図2(B)等では不図示、図13(A)参照)となっている。
残りの5つのチャンバ3002〜3006のうち、チャンバ3004〜3006は、+Y側から見てL字形状を有し、チャンバ3002、3003は、これらと左右対称な形状を有している。5つのチャンバ3002〜3006それぞれの内部空間は、電子ビームによるウエハに対する露光が行われる露光室(露光セル)301i(i=2〜6)(図1〜図3等では不図示、図5参照)となっている。露光室301i内は、高度の真空状態に維持されている。すなわち、内部に露光室301iが形成される5つのチャンバ300iとしては、大気圧の作用によって押しつぶされたり変形したりすることがない十分な耐性を備えた構造の真空チャンバが用いられている。以下では、チャンバ3002〜3006を真空チャンバ3002〜3006とも表記する。
なお、チャンバ3001の内部空間は、上述した計測室になっているため、チャンバ3002〜3006の内部空間のように真空雰囲気にする必要性がない。そのため、チャンバ3001としては、真空チャンバより強度の弱いチャンバを用いることができる。また、チャンバ3001の内部空間及びC/D9000の内部空間の圧力をクリーンルームの気圧よりも高くなるように制御することにより、クリーンルーム内の気体(空気)がチャンバ3001及びC/D9000内に侵入することを抑制することができる。なお、第1制御ラック200の内部空間及び第2制御ラック500の内部空間のそれぞれは、クリーンルームと同圧力(大気圧空間)、またはクリーンリームの気圧よりも高い圧力に設定しても良い。
真空チャンバ300iには、図5に示されるように、前面に一対のロードロックチャンバ302が取付けられている。なお、図5は、真空チャンバ3003、3002、3001と同じ向きのものが示されているが、真空チャンバ3006、3005は、図5に示されるものとは左右対称であるが同様の構成を有している。
各ロードロックチャンバ302は、その内部にロードロック室304(例えば図19参照)が形成される本体部302aと、本体部302aの前面側(大気側)及び背面側(真空側)に固定された一対のゲート部302b、302cとを含む。一対のゲート部302b、302cには、本体部302aの前面側及び背面側に形成された開口を開閉するシャッタと該シャッタを上下方向にスライド駆動する駆動機構とから成るゲートバルブが設けられている。以下では、ゲート部と同一の符号を用いて、ゲートバルブ302b、302cと表記する。ゲートバルブ302b、302cの開閉(すなわち駆動機構によるシャッタの開閉)は、露光制御装置380i(図14、図16参照)によって制御される。
ロードロックチャンバ302には、真空ポンプ等の真空源に開閉弁305(図16参照)を介して接続された真空配管が接続されており、開閉弁305を開けることで、ロードロック室304の内部は、必要に応じて真空引きが行われる。開閉弁305の開閉も露光制御装置380iによって制御される。なお、各ロードロックチャンバ302に、個別に真空ポンプを設けても良い。
真空チャンバ300i内部の露光室301i内には、図5に示される一対の露光ユニット310と、例えば水平多関節ロボットから成る露光室内搬送系312(図5では不図示、図16参照)が収容されている。また、露光室301i内には、図5では不図示であるが、図18等に示されるように、例えば第1の距離離れた上下2段の収納棚を有し、上下動可能なシャトルキャリア306が設けられている。シャトルキャリア306の上下動は、露光制御装置380iによって制御される(図16参照)。
露光ユニット310は、図5に簡略化して示されるように、ステージ装置320と、電子ビーム光学系を有する電子ビーム照射装置330とを含む。
ステージ装置320は、ウエハを保持して移動可能なウエハシャトルが着脱自在に装着される粗微動ステージを含む構成であり、電子ビーム照射装置330は、粗微動ステージに装着されたウエハシャトルに保持されたウエハに電子ビームを照射して露光する構成である。
ここで、ウエハシャトルは、詳しくは後述するが、ウエハを静電吸着して保持する保持部材(あるいはテーブル)であるが、該保持部材がウエハを保持した状態で、保持部材が搬送され、しかもこの保持部材が計測室60を起点として、各露光室3012〜3016それぞれとの間でシャトルバス(あるいはスペースシャトル)のように繰り返し往復するので、ウエハシャトルと称している。
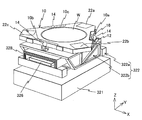
ステージ装置320は、図6に示されるように、定盤321と、定盤321上で移動する粗微動ステージ322と、粗微動ステージ322を駆動する駆動系と、粗微動ステージの位置情報を計測する位置計測系とを備えている。ステージ装置320の構成等の詳細は、後述する。
電子ビーム照射装置330は、図6に示されるように、円筒状の鏡筒331と、鏡筒331の内部の電子ビーム光学系とを含む。電子ビーム照射装置330(鏡筒331)は、外周部に中心角120度の間隔で3つの凸部が形成された円環状の板部材から成るメトロロジーフレーム340によって下方から支持されている。より具体的には、鏡筒331の最下端部は、その上の部分に比べて直径が小さい小径部となっており、その小径部とその上の部分との境界部分は段部となっている。そして、その小径部が、メトロロジーフレーム340の円形の開口内に挿入され、段部の底面がメトロロジーフレーム340の上面に当接した状態で、鏡筒331が、メトロロジーフレーム340によって下方から支持されている。メトロロジーフレーム340は、前述の3つの凸部のそれぞれに下端が接続された3つの吊り下げ支持機構350a、350b、350c(柔構造の連結部材)を介して、露光室301iを区画する真空チャンバ300iの天板(天井壁)から吊り下げ状態で支持されている。すなわち、このようにして、電子ビーム照射装置330は、真空チャンバ300iに対して3点で吊り下げ支持されている。
3つの吊り下げ支持機構350a、350b、350cは、図6中で吊り下げ支持機構350aについて代表的に示されるように、それぞれの上端に設けられた受動型の防振パッド351と、防振パッド(防振部)351の下端にそれぞれの一端が接続され、他端がメトロロジーフレーム340に接続された鋼材より成るワイヤ352とを有する。防振パッド351は、真空チャンバ300iの天板に固定され、それぞれエアダンパ又はコイルばねを含む。
本実施形態では、外部から真空チャンバ300iに伝達された床振動などの振動のうちで、電子光学系の光軸に平行なZ軸方向の振動成分の大部分は防振パッド351によって吸収されるため、電子光学系の光軸に平行な方向において高い除振性能が得られる。また、吊り下げ支持機構の固有振動数は、電子光学系の光軸に平行な方向よりも光軸に垂直な方向で低くなっている。3つの吊り下げ支持機構350a、350b、350cは光軸に垂直な方向には振り子のように振動するため、光軸に垂直な方向の除振性能(真空チャンバ300iに外部から伝達された床振動などの振動が電子ビーム照射装置330に伝わるのを防止する能力)が十分に高くなるように3つの吊り下げ支持機構350a、350b、350cの長さ(ワイヤ352の長さ)を十分に長く設定している。この構造では高い除振性能が得られるとともに機構部の大幅な軽量化が可能であるが、電子ビーム照射装置330と真空チャンバ300iとの相対位置が比較的低い周波数で変化するおそれがある。そこで、電子ビーム照射装置330と真空チャンバ300iとの相対位置を所定の状態に維持するために、非接触方式の位置決め装置353(図5では不図示、図16参照)が設けられている。この位置決め装置353は、例えば国際公開2007/077920などに開示されるように、6軸の加速度センサと、6軸のアクチュエータとを含んで構成することができる。位置決め装置353は、露光制御装置380iによって制御される(図16参照)。これにより、真空チャンバ300iに対する電子ビーム照射装置330のX軸方向、Y軸方向、Z軸方向の相対位置、及びX軸、Y軸、Z軸の回りの相対回転角は、一定の状態(所定の状態)に維持される。
本実施形態では、電子ビーム照射装置330は、鏡筒331内に所定の位置関係で配置されたm個(mは例えば100)の光学系カラムから構成される電子ビーム光学系を備えている。各光学系カラムは、個別にオンオフ可能で、かつ偏向可能なn本(nは例えば4000)のビームを照射可能なマルチビーム光学系から成る。マルチビーム光学系としては、例えば特開2011−258842号公報、国際公開第2007/017255号などに開示される光学系と同様の構成のものを用いることができる。4000本のマルチビームが全てオン状態のとき、例えば100μm×20nmの矩形領域(露光領域)内に等間隔に設定された4000点に同時に紫外光露光装置の解像限界よりも小さい(例えば直径20nm)の電子ビームの円形スポットが形成される。
100個の光学系カラムは、例えば300mmウエハ上に形成された(あるいはショットマップに従ってこれから形成される)例えば100個のショット領域にほぼ1:1で対応している。本実施形態では、100個の光学系カラムのそれぞれが、それぞれオン/オフ可能で、かつ偏向可能な多数(n=4000)の直径20nm電子ビームの円形スポットを矩形(例えば100μm×20nm)の露光領域内に配置し、この露光領域に対してウエハを走査しながら、その多数の電子ビームの円形スポットを偏向しながらオン/オフすることで、ウエハ上の100個のショット領域が露光され、パターンが形成される。したがって、300mmウエハの場合、露光に際してのウエハの移動ストロークは、多少の余裕を持たせても数十mm、例えば50mmあれば十分である。各光学系カラムは、通常の電子ビーム光学系と同様、反射電子を検出する反射電子検出系(不図示)を備えている。電子ビーム照射装置330は、露光制御装置380iによって制御される(図16参照)。
次にステージ装置320の構成等について説明する。図7には、ステージ装置320の粗微動ステージ322に、ウエハシャトル(以下、シャトルと略記する)10が装着された状態の斜視図が示されている。図8には、シャトル10が離脱された(取り外された)状態の図7に示される粗微動ステージ322の斜視図が示されている。
ステージ装置320が備える定盤321は、実際には、露光室301iを区画する真空チャンバ300iの底壁上に設置されている。粗微動ステージ322は、図7及び図8に示されるように、Y軸方向に所定間隔を隔てて配置され、X軸方向にそれぞれ延びる一対の四角柱状の部分を含み、定盤321上でX軸方向に所定ストローク、例えば50mmで移動可能な粗動ステージ322aと、粗動ステージ322aに対してY軸方向に所定ストローク、例えば50mmで移動可能で、かつ残りの5自由度方向、すなわちX軸方向、Z軸方向、X軸周りの回転方向(θx方向)、Y軸周りの回転方向(θy方向)及びZ軸周りの回転方向(θz方向)にX軸方向に比べて短いストロークで可動な微動ステージ322bと、を備えている。なお、図示は省略されているが、粗動ステージ322aの一対の四角柱状の部分は、実際には、微動ステージ322bのY軸方向の移動を妨げない状態で不図示の連結部材によって連結され、一体化されている。
粗動ステージ322aは、粗動ステージ駆動系323(図16参照)によって、X軸方向に所定ストローク(例えば50mm)で駆動される(図10のX軸方向の長い矢印参照)。粗動ステージ駆動系323は、本実施形態では磁束漏れが生じない一軸駆動機構、例えばボールねじを用いた送りねじ機構によって構成される。この粗動ステージ駆動系323は、粗動ステージの一対の四角柱状の部分のうち、一方の四角柱状の部分と定盤321との間に配置される。例えば、定盤321にねじ軸が取り付けられ、一方の四角柱状の部分にボール(ナット)が取り付けられる構成である。なお、定盤321にボールを取り付け、一方の四角柱状の部分にねじ軸を取り付ける構成であっても良い。
また、粗動ステージの一対の四角柱状の部分のうち、他方の四角柱状の部分は、定盤321に設けられた不図示のガイド面に沿って移動する構成である。
ボールねじのねじ軸は、ステッピングモータによって回転駆動される。あるいは、粗動ステージ駆動系323を、駆動源として超音波モータを備えた一軸駆動機構によって構成しても良い。いずれにしても、磁束漏れに起因する磁場変動が電子ビームの位置決めに影響を与えることはない。粗動ステージ駆動系323は、露光制御装置380iによって制御される(図16参照)。
微動ステージ322bは、図9の斜視図に拡大して示されるように、Y軸方向に貫通したXZ断面矩形枠状の部材から成り、重量キャンセル装置324によって、定盤321上でXY平面内で移動可能に支持されている。微動ステージ322bの側壁の外面には、補強用のリブが複数設けられている。なお、重量キャンセル装置324の構成については、後述する。
微動ステージ322bの中空部の内部には、XZ断面が矩形枠状でY軸方向に延びるヨーク325aと、ヨーク325aの上下の対向面に固定された一対の磁石ユニット325bとが設けられ、これらヨーク325aと一対の磁石ユニット325bによって、微動ステージ322bを駆動するモータの可動子325が構成されている。
この可動子325に対応して、粗動ステージ322aの一対の四角柱部分の相互間には、図8から微動ステージ322b及び符号328で示される後述する磁気シールド部材を取り去った状態を示す図10に示されるように、コイルユニットから成る固定子326が架設されている。固定子326と前述の可動子325とによって、可動子325を固定子326に対して、図10に各方向の矢印で示されるように、Y軸方向に所定ストローク、例えば50mmで移動可能で、かつX軸方向、Z軸方向、θx方向、θy方向及びθz方向に微小駆動可能な閉磁界型かつムービングマグネット型のモータ327が構成されている。本実施形態では、モータ327によって微動ステージを6自由度方向に駆動する微動ステージ駆動系が構成されている。以下、微動ステージ駆動系をモータと同一の符号を用いて、微動ステージ駆動系327と表記する。微動ステージ駆動系327は、露光制御装置380iによって制御される(図16参照)。
粗動ステージ322aの一対の四角柱部分の相互間には、例えば図7及び図8などに示されるように、さらに、モータ327の上面及びX軸方向の両側面を覆う状態でXZ断面逆U字状の磁気シールド部材328が架設されている。すなわち、磁気シールド部材328は、四角柱部分が延びる方向に交差する方向(Y軸方向)に延びて形成されており、モータ327の上面に非接触で対向する上面部と、モータ327の側面に非接触で対向する側面部とを備える。この磁気シールド部材328は、微動ステージ322bの中空部内に挿入された状態で、側面部のうち、長手方向(Y軸方向)の両端部の下面が粗動ステージ322aの一対の四角柱部分の上面に固定されている。また、磁気シールド部材328の側面部のうち、上記両端部の下面以外は、微動ステージ322bの内壁面のうち、底壁面(下面)に対して、非接触で対向する。すなわち、磁気シールド部材328は、可動子325の固定子326に対する移動を妨げることがない状態で、微動ステージ322bの中空部内に挿入されている。
磁気シールド部材328としては、所定の空隙(スペース)を隔てて積層された複数層の磁性材料のフィルムによって構成されるラミネートな磁気シールド部材が用いられている。この他、透磁率の異なる2種類の材料のフィルムが交互に積層された構成の磁気シールド部材を用いても良い。磁気シールド部材328は、モータ327の上面及び側面を、可動子325の移動ストロークの全長に渡って覆っており、かつ粗動ステージ322aに固定されているので、微動ステージ322b及び粗動ステージ322aの移動範囲の全域で、上方(電子ビーム照射光学系側)への磁束の漏れをほぼ確実に防止することができる。
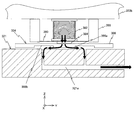
重量キャンセル装置324は、図11に示されるように、微動ステージ322bの下面に上端が接続された金属製のベローズ型空気ばね(以下、空気ばねと略記する)382と、空気ばね382の下端に接続された平板状の板部材から成るベーススライダ386と、を有している。空気ばね382とベーススライダ386とは、中央に開口が形成された板状の接続部材384を介して互いに接続されている。
ベーススライダ386には、空気ばね382内部の空気を、定盤321の上面に噴き出す軸受部386aが空気ばね382の下方に設けられ、軸受部386aから噴出される加圧空気の軸受面と定盤321上面との間の静圧(隙間内圧力)により、ベーススライダ386、重量キャンセル装置324、微動ステージ322b及び可動子325(後述するように、シャトルが粗微動ステージ322に装着された場合には、そのシャトル10等も含む)の自重が支持されている。なお、空気ばね382には、微動ステージ322bに接続された不図示の配管を介して圧縮空気が供給されている。
ベーススライダ386の定盤321に対向する面(下面)には、軸受部386aの周囲に環状の凹部386bが形成され、これに対応して定盤321には、軸受部386aから凹部386bと定盤321の上面とで区画される空間内に噴出された空気を、外部に真空排気するための排気路321aが形成されている。ベーススライダ386の凹部386bは、微動ステージ322bが定盤321上でXY平面内の移動可能な範囲のどこに移動しても、凹部386bに排気路321aの排気口が対向する状態が維持されるような寸法を有している。すなわち、ベーススライダ386の下方に一種の差動排気型の空気静圧軸受が構成され、軸受部386aから定盤321に向かって噴出された空気が、周囲に(露光室内に)漏れ出すことが防止されている。
微動ステージ322bの下面には、空気ばね382を挟んで一対の支柱(ピラー)388が固定されている。一対の支柱388は、空気ばね382のX軸方向の両側で、かつ空気ばね382を中心として左右対称な配置で、Z軸方向の長さが空気ばね382より幾分長い。一対の支柱388それぞれの下端には、空気ばね382の下端面に一端がそれぞれ接続された平面視U字状の一対の板ばね390の他端がそれぞれ接続されている。この場合、一対の板ばね390は、U字の先端部(二股に別れた部分)が空気ばね382に接続され、反対側の端部が一対の支柱388それぞれに接続されている。一対の板ばね390とベーススライダ386とは、ほぼ平行であり、両者の間には所定の間隙が形成されている。
微動ステージ322bのXY平面内の移動の際にベーススライダ386に作用する水平方向の力を、一対の板ばね390が受けることができるので、微動ステージ322bのXY平面内の移動の際に、不要な力が空気ばね382に作用するのをほぼ確実に防止できる。また、一対の板ばね390は、微動ステージ322bがチルト駆動される際には、そのチルトを許容するように変形する。
ここで、シャトル10を粗微動ステージ322、より正確には微動ステージ322bに着脱自在に装着するための構造について説明する。
微動ステージ322bの上面には、図8に示されるように、3つの三角錐溝部材12が設けられている。この三角錐溝部材12は、例えば、平面視でほぼ正三角形の3つの頂点の位置に設けられている。この三角錐溝部材12には、後述するシャトル10に設けられた球体又は半球体が係合可能であり、この球体又は半球体とともにキネマティックカップリングを構成する。なお、図8には、3つの板部材によって構成された花弁のような三角錐溝部材12が示されているが、この三角錐溝部材12は、球体又半球体にそれぞれ点接触する三角錐溝と同じ役割を有するので、三角錐溝部材と称している。したがって、三角錐溝が形成された単一の部材を、三角錐溝部材12の代わりに用いても良い。
本実施形態では、3つの三角錐溝部材12に対応して、図7に示されるように、シャトル10に3つの球体又は半球体(本実施形態ではボール)14が設けられている。シャトル10は、平面視で正三角形の各頂点を切り落としたような六角形状で形成されている。これをさらに詳述すると、シャトル10には、平面視で3つの斜辺それぞれの中央部に切り欠き部10a、10b、10cが形成され、切り欠き部10a、10b、10cをそれぞれ外側から覆う状態で、板ばね16がそれぞれ取り付けられている。各板ばね16の長手方向の中央部にボール14がそれぞれ固定されている。三角錐溝部材12に係合される前の状態では、各ボール14は、外力を受けた場合、シャトル10の中心(図7に示されるウエハWの中心にほぼ一致)を中心とする半径方向にのみ微小移動する。
微動ステージ322bの上方で3つの三角錐溝部材12にほぼ対向する位置に、シャトル10の3つのボール14を移動させた後、シャトル10を降下させることにより、3つのボール14のそれぞれが、3つの三角錐溝部材12に個別に係合し、シャトル10が微動ステージ322bに装着される。この装着時に、シャトル10の微動ステージ322bに対する位置が所望の位置からずれていたとしても、ボール14が三角錐溝部材12に係合する際にその三角錐溝部材12から外力を受けて前述の如く半径方向に移動する結果、3つのボール14が対応する三角錐溝部材12に、常に同じ状態で係合する。一方、シャトル10を上方に移動させて、ボール14と三角錐溝部材12との係合を解除するだけで、シャトル10を微動ステージ322bから簡単に取り外す(離脱させる)ことができる。すなわち、本実施形態では3組のボール14と三角錐溝部材12との組によって、キネマティックカップリングが構成され、このキネマティックカップリングによって、シャトル10の微動ステージ322bに対する取り付け状態を常にほぼ同一状態に設定することができるようになっている。したがって、何度、取り外しても、再度、シャトル10をキネマティックカップリング(3組のボール14と三角錐溝部材12との組)を介して微動ステージ322bに装着するだけで、シャトル10と微動ステージ322bとの一定の位置関係を、再現することができる。
シャトル10の上面には、例えば図7に示されるように、中央にウエハWより僅かに直径が大きな円形の凹部が形成され、該凹部内に不図示の静電チャックが設けられ、該静電チャックによってウエハWが静電吸着され保持されている。このウエハWの保持状態では、ウエハWの表面は、シャトル10の上面とほぼ同一面となっている。シャトル10にはウエハWの載置面(吸着面)に上下に貫通する円形開口(不図示)が複数、所定の位置関係で形成されている。
次に、粗微動ステージ322の位置情報を計測する位置計測系について説明する。この位置計測系は、シャトル10が微動ステージ322bに前述したキネマティックカップリングを介して装着された状態で、シャトル10の位置情報を計測する。この位置計測計は、シャトル10が装着された微動ステージ322bの位置情報を計測する第1計測系20と、微動ステージ322bの位置情報を直接計測する第2計測系25とを含む(図16参照)。
まず、第1計測系20について説明する。シャトル10の前述の3つの斜辺を除く3つの辺それぞれの近傍には、図7に示されるように、グレーティングプレート22a、22b、22cがそれぞれ設けられている。グレーティングプレート22a、22b、22cのそれぞれには、シャトル10の中心(本実施形態では円形の凹部の中心に一致)を中心とする半径方向とこれに直交するする方向のそれぞれを周期方向とする2次元格子がそれぞれ形成されている。例えば、グレーティングプレート22aには、Y軸方向及びX軸方向を周期方向とする2次元格子が形成されている。また、グレーティングプレート22bには、シャトル10の中心に関してY軸に対して−120度を成す方向(以下、α方向と称する)及びこれに直交する方向を周期方向とする2次元格子が形成され、グレーティングプレート22cには、シャトル10の中心に関してY軸に対して+120度を成す方向(以下、β方向と称する)及びこれに直交する方向を周期方向とする2次元格子が形成されている。2次元格子としては、それぞれの周期方向について、ピッチが例えば1μmの反射型の回折格子が用いられている。
3つのグレーティングプレート22a、22b、22cに対応して、図12(A)に示されるように、メトロロジーフレーム340の下面(−Z側の面)には、3つのグレーティングプレート22a、22b、22cのそれぞれに個別に対向可能な位置に、3つのヘッド部24a、24b、24cが固定されている。3つのヘッド部24a、24b、24cのそれぞれには、図12(B)中に各4本の矢印で示される計測軸を有する4軸エンコーダヘッドが設けられている。
これをさらに詳述すると、ヘッド部24aは、同一の筐体の内部に収容された、X軸方向及びZ軸方向を計測方向とする第1ヘッドと、Y軸方向及びZ軸方向を計測方向とする第2ヘッドとを含む。第1ヘッド(より正確には、第1ヘッドが発する計測ビームのグレーティングプレート22a上の照射点)と、第2ヘッド(より正確には、第2ヘッドが発する計測ビームのグレーティングプレート22a上の照射点)とは、同一のX軸に平行な直線上に配置されている。ヘッド部24aの第1ヘッド及び第2ヘッドは、それぞれグレーティングプレート22aを用いて、シャトル10のX軸方向及びZ軸方向の位置情報を計測する2軸リニアエンコーダ、及びY軸方向及びZ軸方向の位置情報を計測する2軸リニアエンコーダを構成する。
残りのヘッド部24b、24cは、それぞれのメトロロジーフレーム340に対する向きが異なる(XY平面内における計測方向が異なる)が、第1ヘッドと第2ヘッドとを含んでヘッド部24aと同様に構成されている。ヘッド部24bの第1ヘッド及び第2ヘッドは、それぞれグレーティングプレート22bを用いて、シャトル10のα方向にXY平面内で直交する方向及びZ軸方向の位置情報を計測する2軸リニアエンコーダ、及びα方向及びZ軸方向の位置情報を計測する2軸リニアエンコーダを構成する。ヘッド部24cの第1ヘッド及び第2ヘッドは、それぞれグレーティングプレート22cを用いて、シャトル10のβ方向にXY平面内で直交する方向及びZ軸方向の位置情報を計測する2軸リニアエンコーダ、及びβ方向及びZ軸方向の位置情報を計測する2軸リニアエンコーダを構成する。
ヘッド部24a、24b、24cそれぞれが有する第1ヘッド及び第2ヘッドのそれぞれとしては、例えば米国特許第7,561,280号明細書に開示される変位計測センサヘッドと同様の構成のエンコーダヘッドを用いることができる。
上述した3組、合計6つの2軸エンコーダ、すなわち3つのグレーティングプレート22a、22b、22cをそれぞれ用いてシャトル10の位置情報を計測する3つのヘッド部24a、24b、24cによって、エンコーダシステムが構成され、このエンコーダシステムによって第1計測系20(図16参照)が構成されている。第1計測系20で計測される位置情報は、露光制御装置380iに供給される。
第1計測系20は、3つのヘッド部24a、24b、24cがそれぞれ4つの計測自由度(計測軸)を有しているので、合計12自由度の計測が可能である。すなわち、3次元空間内では、自由度は最大で6であるから、実際には、6自由度方向のそれぞれについて、冗長計測が行われ、各2つの位置情報が得られることになる。
したがって、露光制御装置380iは、第1計測系20で計測された位置情報に基づいて、それぞれの自由度について各2つの位置情報の平均値を、それぞれの方向の計測結果とする。これにより、平均化効果により、6自由度の全ての方向について、シャトル10及び微動ステージ322bの位置情報を、高精度に求めることが可能になる。
次に、第2計測系25について説明する。第2計測系25は、シャトル10が微動ステージ332bに装着されているか否かを問わず、微動ステージ332bの6自由度方向の位置情報の計測が可能である。第2計測系25は、例えば微動ステージ332bの側壁の外面に設けられた反射面にビームを照射し、その反射光を受光して微動ステージ332bの6自由度方向の位置情報を計測する干渉計システムによって構成することができる。干渉計システムの各干渉計は、メトロロジーフレーム340に不図示の支持部材を介して吊り下げ支持しても良いし、あるいは定盤321に固定しても良い。第2計測系は、露光室301i内(真空空間内)に設けられるので、空気揺らぎに起因する計測精度の低下のおそれがない。また、第2計測系25は、本実施形態では、シャトル10が微動ステージ332bに装着されていないとき、すなわちウエハの露光が行われないときに、主として、微動ステージ332bの位置、姿勢を所望の状態に維持するために用いられるので、第1計測系20に比べて計測精度は低くても良い。第2計測系25で計測される位置情報は、露光制御装置380iに供給される(図16参照)。なお、干渉計システムに限らず、エンコーダシステムにより、あるいはエンコーダシステムと干渉計システムとの組み合わせによって、第2計測系を構成しても良い。後者の場合、微動ステージの322bのXY平面内の3自由度方向の位置情報をエンコーダシステムで計測し、残りの3自由度方向の位置情報を干渉計システムで計測しても良い。
本実施形態では、真空チャンバ3002〜3006がそれぞれ備えるロードロックチャンバ302も、真空チャンバ3002〜3006と同様、Y軸方向に並んで配置されるので、一方の列の真空チャンバ3003、3002がそれぞれ備えるロードロックチャンバ302、及びチャンバ3001と、他方の列の真空チャンバ3006、3005、3004がそれぞれ備えるロードロックチャンバ302とは、所定の間隔を隔てて対向している。そして、図2(B)、図3及び図4に示されるように、この対向する両者間に、Y軸方向に延びる断面矩形の搬送空間SPを区画する搬送チャンバ311が設けられている。搬送空間SP内に後述するシャトル搬送系の移動経路が設けられている。なお、図示は省略されているが、搬送チャンバ311の両側壁には、ゲート部に対向する位置に、シャトル10の通路となる開口が形成されている。なお搬送空間SPは、真空チャンバの内部に比べて真空度の低い低真空空間、例えば、大気圧空間に設定することができるから、搬送チャンバ311は必ずしも用いる必要はない。
露光制御装置3802、3803、3804、3805、3806は、図2(B)及び図4に示されるように、各ロードロックチャンバ302の上方且つ真空チャンバ3002、3003、3004、3005、3006の内側の空間に配置された制御ボックス3812、3813、3814、3815、3816内にそれぞれ収納されている。なお、制御ボックス3812、3813、3814、3815、3816は、図2(B)に制御ボックス3813について代表的に示されるように、実際には、真空チャンバと搬送チャンバ311との間に架設された支持フレーム313の上に載置されている。支持フレーム313は、実際には、床面F上に支持されている。
次に、計測室60内部の構成について簡単に説明する。計測室60内には、図13(A)に示されるように、XY平面内で2次元移動する計測ステージSTと計測ステージST上に搭載された計測テーブルTBとを有する計測ステージ装置30と、計測システム40と、ウエハW及びシャトル10を搬送する例えば多関節ロボットから成る計測室内搬送系62(図15参照)とが収納されている。計測ステージ装置30には、計測テーブルTBに前述と同様のキネマティックカップリングを介して着脱自在にシャトル10が装着される。そして、計測システム40は、シャトル10に保持されたウエハWに対して所定の計測を行う。
この他、計測室60の内部には、シャトル10を収納可能な複数段の棚を有し、複数のシャトル10を同時保管可能なシャトルストッカ(不図示)が設けられている。本実施形態では、シャトルストッカは、収納されているシャトル10の温調機能をも有している。これに限らず、シャトルの温調装置を、シャトルストッカとは別に設けも良い。なお、ウエハを搬送する搬送系とシャトルを搬送する搬送系とが別々に設けられていても良いが、本実施形態では、説明を簡略化するため、同一の搬送系によりウエハ及びシャトルの搬送が行われるものとする。
計測テーブルTBには、シャトル10に形成された前述の複数の円形開口に対応する配置で複数の円形開口が形成されている。計測ステージSTには、複数の円形開口に対応する配置で、複数のピン32が凸設されており、複数のピン32が計測テーブルTBの複数の円形開口内に個別に挿入された状態で、計測テーブルTBが計測ステージST上に配置されている。計測テーブルTBは、計測ステージSTに設けられた駆動系34によって駆動され、所定ストロークで上下動(Z軸方向に移動)可能である。本実施形態では、計測テーブルTBは、シャトル10がキネマティックカップリングを介して装着された状態で、シャトル10の上面が複数のピン32の上端面より所定距離高くなる(複数のピンの上端面がシャトル10の上面から突出しない)図13(A)に示される第1位置と、シャトル10のウエハ載置面(静電チャックの上面)が複数のピン32の上端面より所定距離低くなる(複数のピン32の上端面がシャトル10のウエハ載置面から突出する)図13(B)に示される第2位置との間で、上下動可能である。
なお、計測ステージST上に計測テーブルTBを載置し、計測テーブルTBに対して、複数のピン32を上下動させても良い。
計測ステージSTは、例えば平面モータから成る計測ステージ駆動系36(図15参照)によってXY平面内で駆動(θz方向の回転を含む)される。計測ステージSTのXY平面内の位置情報は、計測ステージ干渉計38(図15参照)によって計測されている。また、計測テーブルTBの上下方向の位置は、駆動系34が有するエンコーダによって計測されている。計測ステージ装置30の各部の動作は、計測制御装置50によって制御される(図15参照)。
計測システム40は、図13(A)に示されるように、アライメント検出系ALGと、照射系42aと受光系42bとを有する面位置検出装置AF(図15参照)とを含む。
本実施形態では、シャトル10上に保持されているウエハ上面には、感応剤(電子線用レジスト)が塗布さているのに対応して、アライメント検出系ALGの検出光として、電子線レジストを感光させない波長の検出ビームが用いられる。アライメント検出系ALGとして、例えばウエハ上に塗布されているレジストを感光させないブロードバンドな検出光束を対象マークに照射し、その対象マークからの反射光により受光面に結像された対象マークの像と不図示の指標(内部に設けられた指標板上の指標パターン)の像とを撮像素子(CCD等)を用いて撮像し、それらの撮像信号を出力する画像処理方式のFIA(Field Image Alignment)系が用いられている。アライメント検出系ALGからの撮像信号は、信号処理装置(不図示)を介して計測制御装置50に供給されるようになっている(図15参照)。なお、アライメント検出系ALGとして、FIA系に限らず、例えばコヒーレントな検出光を対象マークに照射し、その対象マークから発生する2つの回折光(例えば同次数の回折光、あるいは同方向に回折する回折光)を干渉させて検出する回折光干渉型のアライメント検出系を、FIA系に代えて用いても良い。
面位置検出系AFは、照射系42aと受光系42bとを有し、例えば米国特許第5,448,332号明細書等に開示されるものと同様の構成の斜入射方式の多点焦点位置検出系によって構成される。面位置検出系AFの複数の検出点は、被検面上でX軸方向に沿って所定間隔で配置される。本実施形態では、例えば1行M列(Mは検出点の総数)または2行N列(Nは検出点の総数の1/2)の行マトリックス状に配置される。図13(A)中では、図示が省略されているが、複数の検出点は、ウエハWの直径と同程度のX軸方向の長さを有する領域内にほぼ均等に設定されているので、ウエハWをY軸方向に1回スキャンするだけで、ウエハWのほぼ全面でZ軸方向の位置情報(面位置情報)を計測できる。本実施形態では、上述した計測室60内に配置された各部、すなわち計測ステージ装置30、計測システム40、及び計測室内搬送系62等と、計測制御装置50とによって、シャトル10上に保持された露光前のウエハに対する事前計測を行う計測部65が構成されている(図15参照)。
この他、本実施形態に係る露光システム1000は、前述の空間SP内を移動して、露光前のウエハを保持するシャトル10を、計測室60から真空チャンバ300iがそれぞれ備えるロードロックチャンバ302に搬送し、露光済みのウエハを保持するシャトル10をロードロックチャンバ302から計測室60に搬送する、シャトルの搬送動作を繰り返し行うシャトル搬送系70(図14参照)を、さらに備えている。シャトル搬送系70は、例えば空間SP内を移動可能な水平多関節ロボットによって構成される。シャトル搬送系70は、マイクロコンピュータ等を含む搬送系制御装置72(図14参照)によって制御される。
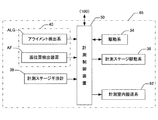
図14には、露光システム1000の制御系の構成がブロック図にて示されている。露光システム1000の制御系は、露光システム1000の全体を統括的に制御するワークステーション等から成る主制御装置100と、主制御装置100の配下にある計測制御装置50、5つの露光制御装置3802〜3806、及び搬送系制御装置72とを備えている。
図15には、図14の制御系を構成する計測制御装置50の入出力関係がブロック図にて示されている。計測制御装置50は、マイクロコンピュータ等を含み、計測室60内に設けられた図15に示される各部を制御する。
図16には、図14の制御系を構成する5つの露光制御装置380i(i=2〜6)の入出力関係がブロック図にて示されている。露光制御装置380iは、マイクロコンピュータ等を含み、露光室301i内に設けられた図16に示される各部を制御する。
次に、計測室60内で行われる事前準備作業の一例について、図17(A)のフローチャートに基づいて説明する。以下で説明する各ステップの処理は、計測制御装置50の制御下で行われるが、以下では、説明の簡略化のため、計測制御装置50に関する説明は特に必要な場合を除き省略する。
前提として、シャトルストッカ(不図示)には、複数のシャトル10が保管されているものとする。また、露光前のウエハは、計測室60にインラインにて接続されているC/D9000側のウエハ搬送系によって基板受け渡し部に載置されているものとする。
ステップS102において、シャトルストッカ(不図示)に保管されているシャトル10が、計測テーブルTBに装着される。具体的には、シャトルストッカ(不図示)に保管されているシャトル10が、計測室内搬送系62により、シャトルストッカからウエハ交換位置にある計測ステージST上で前述の第2位置に位置している計測テーブルTBの上方に搬送された後、下方に駆動されて計測テーブルTBにキネマティックカップリングを介して装着される。
次のステップS104では、計測室内搬送系62により基板受け渡し部にある露光前のウエハ(便宜上、ウエハW1とする)が、計測ステージSTの複数のピン32に渡される。このとき、計測テーブルTBは第2位置にあり、この状態で、ウエハW1は、回転位置ずれ及び中心位置ずれが調整された状態で、複数のピン32の上に載置される。
次のステップS106では、ウエハW1をシャトル10に保持させる。具体的には、計測テーブルTBを第1位置まで上方に駆動することで、ウエハW1をシャトル10の静電チャック上に載置し、その後、静電チャックによるウエハの吸着を開始する。なお、シャトル10には、静電チャックに接続された接続端子が設けられ、また、計測テーブルTBには、不図示の電力供給源に接続されたテーブル側端子が設けられており、計測テーブルTBにシャトル10がキネマティックカップリングを介して装着された時に、接続端子とテーブル側端子とが接続され、電力供給源から静電チャックに電力が供給可能になる。
次のステップS108では、ウエハW1のシャトル10に対する概略(ラフ)位置計測を行う。具体的には、最初に、ウエハW1のサーチアライメントを行った後、シャトル10に設けられた基準マーク(不図示)の位置情報を計測し、シャトル10(基準マーク)に対するウエハW1の相対位置情報を求める。
サーチアライメントに際し、例えば、ウエハW1の中心に関してほぼ対称に周辺部に位置する少なくとも2つのサーチアライメントマーク(以下、サーチマークと称する)が検出対象となる。計測制御装置50は、計測ステージ駆動系36による計測ステージSTの駆動を制御して、それぞれのサーチマークをアライメント検出系ALGの検出領域(検出視野)内に位置決めしつつ、計測ステージ干渉計38による計測情報を取得し、アライメント検出系ALGを用いてウエハW1に形成されたサーチマークを検出した時の検出信号と、計測ステージ干渉計38による計測情報とに基づいて、各サーチマークの位置情報を求める。
より具体的には、計測制御装置50は、信号処理装置(不図示)から出力されるアライメント検出系ALGの検出結果(検出信号から求まるアライメント検出系ALGの検出中心(指標中心)と各サーチマークとの相対位置関係)と、各サーチマーク検出時の計測ステージ干渉計38の計測値とに基づいて、2つのサーチマークの基準座標系上の位置座標を求める。ここで、基準座標系は、計測ステージ干渉計38の測長軸によって規定される直交座標系である。
しかる後、計測制御装置50は、サーチマークと同様の手順で、シャトル10上に設けられた複数の基準マークの基準座標系上の位置座標を求める。そして、2つのサーチマークの位置座標と複数の基準マークの位置座標とに基づいて、ウエハW1のシャトル10に対する相対位置を求める。ここで、概略位置計測と読んでいるのは、アライメント検出系ALGによるマークの位置座標の検出精度が、露光直前に行われる、反射電子の検出によるアライメントマークの位置座標の検出精度に比べて低いからである。これにより、ウエハW1のシャトル10に対する概略位置計測が終了する。なお、ウエハW1は、実際には回転位置ずれ及び中心位置ずれが調整された状態でシャトル10上にロードされるので、ウエハW1の中心位置ずれは無視できるほど小さく、残留回転誤差は非常に小さい。
ステップS108のウエハW1のシャトル10に対する概略位置計測が終了すると、ステップS110に進み、ウエハW1のフラットネス計測(表面の凹凸の計測)が行われる、このフラットネス計測は、計測ステージSTをY軸方向に移動させながら、面位置検出装置AFの計測情報と計測ステージ干渉計38の計測情報とを所定のサンプリング間隔で取り込むことで行われる。ここで、ウエハのフラットネスの計測を行うのは、電子ビーム露光装置では、ウエハ表面の凹凸に起因してウエハのXY平面内の位置計測誤差(横ずれ)が生じるので、露光の際にこの位置計測誤差を補正する必要があるからである。この位置計測誤差は、ウエハのフラットネス情報(ウエハ座標系上のXY座標位置(X,Y)に応じたZ位置の情報Z(X,Y))に基づいて簡単に演算で求めることができる。なお、サーチアライメントにより、ウエハの回転ずれの情報は既知なので、ウエハ座標系と前述の基準座標系との関係は、簡単に求めることができる。
ステップS110のフラットネス計測が終了すると、ステップS112において、ウエハW1を保持したシャトル10が、計測室内搬送系62によって、上方に駆動され、キネマティックカップリングを解除して計測テーブルTB上から取り外された後、計測室60の空間SPとの境界部に設けられているシャトル受け渡し部のロード側シャトル載置部に載置される。これにより、計測室60内における事前計測動作(S108、S110)を含む事前準備作業が終了する。なお、計測テーブルTBからシャトル10が取り外された後も、シャトル10の静電チャックは、残留電荷によりウエハW1を保持することが可能である。また、シャトル10に内部電源を設け、計測テーブルTBからシャトル10が取り外された後は、この内部電源から静電着チャックに電力を供給しても良い。
次に、計測室60内で行われる露光済みのウエハのアンロード作業について、図17(B)のフローチャートに基づいて説明する。以下で説明する各ステップの処理は、計測制御装置50の制御下で行われるが、以下では、説明の簡略化のため、計測制御装置50に関する説明は特に必要な場合を除き省略する。前提として、露光済みのウエハを保持するシャトルが、シャトル受け渡し部のアンロード側シャトル載置部に載置されているものとする。
ステップS122において、露光済みのウエハ(便宜上、ウエハW0とする)を保持するシャトル10が、計測テーブルTBに装着される。具体的には、ウエハW0を保持するシャトル10が、計測室内搬送系62により、シャトル受け渡し部のアンロード側シャトル載置部からウエハ交換位置にある計測ステージST上で前述の第1位置に位置している計測テーブルTBの上方に搬送された後、下方に駆動されて計測テーブルTBにキネマティックカップリングを介して装着される。
次のステップS124では、シャトル10からウエハW0を離脱させる(取り外す)。具体的には、シャトル10の静電チャックによるウエハW0の吸着を解除し、計測テーブルTBを第2位置まで下方に駆動する。これにより、複数のピン32によってウエハW0が下方から全体的に押し上げられ、ウエハW0をシャトル10から容易に離脱させることができる。なお、残留電荷に起因してウエハW0がシャトル10から離脱させ難い場合には、ウエハW0に超音波を印可させたり、または各種除電対策を行いながらウエハを離脱させることもできる。
次のステップS126では、複数のピン32によって支持されているウエハW0が、計測室内搬送系62により計測テーブルTB上から搬出され前述の基板受け渡し部に載置される。
次のステップ128では、シャトル10が、計測室内搬送系62によって、上方に駆動され、キネマティックカップリングを解除して計測テーブルTB上から取り外された後、シャトルストッカの空いている収納棚に収納される。これにより、計測室60内における露光済みのウエハのアンロード作業が終了する。シャトルストッカ内に収納されたシャトル10は、次に取り出されるまで、シャトルストッカ内に保管されるが、この保管中に所定の温度に調整(冷却)される。
次に、露光システム1000によるウエハに対する処理の流れについて説明する。以下で説明する処理は、計測制御装置50及び露光制御装置3802〜3806、並びに搬送系制御装置72により、これらの制御装置を統括的に管理する主制御装置100の管理の下で行われるが、以下では、これらの制御装置に関する説明は特に必要な場合を除き、省略する。また、実際には、各露光室301i内には、露光ユニット310が、各2つ収容され、これに対応してロードロックチャンバ302(ロードロック室)も2つ設けられているが、以下では、説明の便宜上、各露光室301i内には、露光ユニット310が1つ収容され、ロードロックチャンバも真空チャンバに1つだけ設けられているものとする。すなわち、真空チャンバ(露光室)と、露光ユニットと、ロードロックチャンバ(ロードロック室)とが、互いに1:1対応であるものとする。
露光システム1000による処理が開始されるのに先立って、C/D9000内の搬送系(例えば多関節型のロボット)により、電子線レジストが塗布された露光前のウエハが計測室60とC/D9000との境界部分に設けられた基板受け渡し部上に載置される。C/D9000内では、ウエハに対する電子線レジスト塗布処理を含む一連の処理が順次繰り返し行われ、ウエハが順次基板受け渡し部上に載置される。
まず、計測室60内で、前述したステップS102〜ステップS112の処理が行われる。これにより、ウエハのシャトルに対する概略位置計測及びフラットネス計測が終了した露光前のウエハW1を保持するシャトル10が、シャトル受け渡し部のロード側シャトル載置部に載置されることになる。
次いで、シャトル搬送系70により、シャトル受け渡し部のロード側シャトル載置部から露光前のウエハW1を保持するシャトル10が、主制御装置100によって指定された露光室301iに対応するロードロックチャンバ302の前方に搬送された後、その指定された露光室301i内の露光済みのウエハWを保持するシャトル10と交換される。この場合、主制御装置100は、その時点でウエハに対する露光処理が終了している露光室301iがあれば、その露光室301iを指定し、露光処理が終了している露光室がなければ、最も早いタイミングで露光処理が終了する予定の露光室301iを指定する。ここでは、一例として、最も早いタイミングで露光処理が終了する予定の露光室301iが指定されるものとする。
以下、シャトル交換動作、すなわちシャトルと一体でのウエハの交換動作について図面に基づいて具体的に説明する。まず、シャトル受け渡し部のロード側シャトル載置部から搬出されたウエハW1を保持するシャトル10は、図18に示されるように、露光室301iが内部に形成された真空チャンバ300iのロードロックチャンバ302の前方(この場合、+Y側)の位置までシャトル搬送系70によって搬送される。このとき、露光室301i内では、ウエハW0の露光が行われている。なお、以下の説明では、「ウエハW1を保持するシャトル」を、便宜上、「シャトル101」と表記し、「ウエハW0を保持するシャトル」を、「シャトル100」と表記する。また、これに併せて、以下の説明で用いる図19〜図27においては、ウエハの図示が省略されている。
ウエハW0の露光が終了すると、図18中に下向きの白抜き矢印で示されるように、真空チャンバ300iのロードロックチャンバ302に設けられた外側(大気側)ゲートバルブ302bが開けられた後、図19中に黒矢印で示されるように、シャトル101がシャトル搬送系70によってロードロック室304内に搬入される。次に、図19中に上向きの白抜き矢印で示されるように、外側(大気側)ゲートバルブ302bが閉じられた後、ロードロック室304内の真空引きが開始される。
シャトル搬送系70は、ロードロック室304内にシャトル101を搬入後、次の露光前のウエハを保持するシャトルをシャトル受け渡し部から別のロードロック室内に搬入する動作、又は別の露光済みのウエハを保持するシャトルを別のロードロック室から搬出し、シャトル受け渡し部に搬送する動作など(以下、別の動作と称する)に従事する。
そして、ロードロック室304内が露光室301iと同程度の高真空状態に達すると、図20中に下向きの白抜き矢印で示されるように、ロードロックチャンバ302に設けられた内側(真空側)ゲートバルブ302cが開けられた後、露光室301i内部の露光室内搬送系312によって、シャトル101が露光室301i内のシャトルキャリア306の下段の収納棚に収納される。このときシャトルキャリア306は、図20に示されるように、下段の収納棚の高さが、ロードロック室304の開口に一致する第1の状態(第1位置)にある。このときの、シャトル101の位置を、便宜上、搬出入位置と称する。このとき、シャトル100上のウエハW0に対する露光が続行されている。なお、図18〜図27では、シャトルの位置をわかり易くするため、シャトルキャリア306は、仮想線(二点鎖線)にて簡略化して示されている。
次いで、図21中に白抜き矢印で示されるように、シャトルキャリア306は、第1位置から第1の距離下方の第2位置まで下降する。これにより、シャトルキャリア306は、上段の収納棚の高さが、ロードロック室304の開口に一致する第2の状態となる。このとき、シャトル100上のウエハW0に対する露光が続行されているので、シャトルキャリア306は、露光が終了するまで、第2の状態を維持する。すなわち、シャトル101は、搬出入位置の下方の第1待機位置で待機する。
そして、露光が終了すると、露光室内搬送系312により、シャトル100が、微動ステージ322bから取り外され、図21中に黒矢印で示されるようにロードロックチャンバ302側(+Y側)に向かって搬送され、シャトルキャリア306の上段の収納棚に収納される。これにより、シャトルキャリア306の上下の収納棚にそれぞれ収納された、シャトル100とシャトル101とが、図22に示されるように、上下に重なった状態となる。なお、微動ステージ322bからシャトル100が取り外されるのに先立って、第2計測系25(図16参照)の計測情報に基づく、微動ステージ322bの6自由度方向の位置、姿勢のフィードバック制御が、露光制御装置380iによって開始され、次に第1計測系20(図16参照)の計測情報に基づく、シャトルと一体の微動ステージ322bの位置制御が開始されるまでの間、微動ステージ322bの6自由度方向の位置、姿勢は所定の基準状態に維持される。
次いで、図22中に白抜き矢印で示されるように、シャトルキャリア306が、上方に第1の距離移動し、前述の第1の状態(第1位置)に戻る。すなわち、このシャトルキャリア306の上昇動作により、シャトル101とシャトル100とを上方に、第1の距離移動させて、シャトル100を搬出入位置の上方の第2待機位置へ位置させるとともにシャトル101を搬出入位置へ位置させる。
次いで、露光室内搬送系312により、シャトル101がシャトルキャリア306から取り出され、図23中に黒矢印で示されるように粗微動ステージ322の上方に向かって搬送され、微動ステージ322bに装着される(図24参照)。このとき、前述の如く、微動ステージ322bの6自由度方向の位置、姿勢は基準状態に維持されているので、シャトル101を、キネマティックカップリングを介して微動ステージ322bに装着するだけで、電子ビーム照射装置330(電子光学系)とシャトル101との位置関係が所望の位置関係となる。そして、先に説明した簡略アライメント計測の結果を考慮して、微動ステージの322bの位置を微調整することで、微動ステージ322bに装着されたシャトル101上のウエハW1に形成された複数(例えば100個)のショット領域のそれぞれに対応してスクライブライン(ストリートライン)に形成された少なくとも各1つのアライメントマークに対して、電子光学系から電子ビームを確実に照射することが可能となる。したがって、少なくとも各1つのアライメントマークからの反射電子が反射電子検出系で検出され、ウエハW1の全点アライメント計測が行われ、この全点アライメント計測の結果に基づいて、ウエハW1上の複数のショット領域に対し、電子ビーム照射装置330を用いた露光が開始される。
上記の全点アライメント計測及び露光と並行して、シャトル100の前述のシャトル受け渡し部のアンロード側シャトル載置部への搬送動作(シャトルの回収動作)が、以下の手順で行われる。
すなわち、まず、シャトルキャリア306が、図24に白抜き矢印で示されるように、第1の距離下方に移動して、再び第2の状態となる。これにより、図25に示されるように、シャトル100が収納されたシャトルキャリア306の上段の収納棚が、ロードロック室304の開口と同じ高さに位置する。
次いで、露光室内搬送系312により、シャトル100がシャトルキャリア306から取り出され、図25中に黒矢印で示されるように、ロードロック室304内へ向けて搬送され、シャトル100がロードロック室304内に搬入された時点で、真空側のゲートバルブ302cが閉じられる(図26中の白抜き矢印参照)。
このとき、シャトル搬送系70は、前述した別の動作を一旦終了して真空チャンバ300iが備えるロードロックチャンバ302の前に移動している。なお、シャトル搬送系70が、別の動作を継続中であった場合、例えば露光室301i内でのウエハW0の露光が終了した時点で、主制御装置100は、直ちにその別の動作を一時的に中断させ、真空チャンバ300iが備えるロードロックチャンバ302の前に移動させても良い。
次いで、図27中に下向きの白抜き矢印で示されるように、大気側のゲートバルブ302bが開けられた後、シャトル搬送系70によりシャトル100がロードロック室304から取り出されて、回収される。露光制御装置380iは、ゲートバルブ302bを開けるのと前後して、図27中に上向きの白抜き矢印で示されるように、第2状態にあるシャトルキャリア306を、第1の距離上向きに駆動して第1状態に戻す。なお、シャトル100が取り出された後、ゲートバルブ302bは、閉じられる。
次いで、回収されたシャトル100は、シャトル搬送系70により、直ちに、シャトル受け渡し部のアンロード側シャトル載置部へ戻される。この戻されたシャトル100は、計測室内搬送系62によって、ウエハ交換のため、計測テーブルTBに向けて搬送される。以後、計測室60内では前述した処理が繰り返し行われ、主制御装置100により露光室の指定がなされる度に、シャトル搬送系70によるシャトルの搬送、及び指定された露光室301iでのシャトルの交換及び露光処理動作が繰り返し行われる。
なお、シャトル100のロードロック室304から取り出すためのゲートバルブ302bの開放と前後して、シャトルキャリア306を、第1の状態(第1位置)に戻すものとしたが、これに限らず、第2の状態にあるシャトルキャリア306をそのままにしても良い。この場合には、露光室301i内でのシャトルの交換に際して、シャトルキャリア306の第1の状態と第2の状態との設定が上の説明と反対になるようにしつつ、上述と同様の手順でシャトル交換を行えば良い。この場合、露光前のウエハを保持するシャトルに対する第1待機位置が、搬出入位置の上方に設定され、露光済みのウエハを保持するシャトルに対する第2待機位置が、搬出入位置の下方に設定されることになる。
なお、実際には、上述した計測室60内での事前準備作業、及びシャトル搬送系70による一連の動作(露光前のウエハを保持するシャトルの、シャトル受け渡し部からロードロック室内への搬入、及び露光済みのウエハを保持するシャトルのロードロック室からの搬出及びシャトル受け渡し部への搬送などの動作)に要する合計の所要時間は、1つの露光ユニット310で行われる露光動作(全点アライメント動作を含む)の所要時間に比べて格段に短いので、本実施形態に係る露光システム1000のように、10台の露光ユニット310に対して、計測室60及びシャトル搬送系70が、それぞれ1つのみ設けられているだけで十分である。すなわち、計測室60内での一連の動作、及びシャトル搬送系70による一連の動作が原因となって、露光システム1000全体としてのスループットの低下を生じさせることはない。反対に、本実施形態に係る露光システム1000のようなに複数台の露光ユニットに対して、計測室、シャトル搬送系をそれぞれ1つのみ設けることで、電子ビーム露光の本質的な欠点である、スループットが著しく低いという欠点を補って、実用上、十分なスループットを確保することが可能になる。なお、真空チャンバ3003、及び真空チャンバ3006の少なくとも一方に隣接して、真空チャンバ(露光室)の増設は容易であるので、計測室60及びシャトル搬送系70に、遊びの時間がある場合には、露光室(及び露光ユニット)の数をさらに増やすことで、さらなるスループットの向上が期待できる。
以上説明したように、本実施形態に係る露光システム1000の複数の露光ユニット310がそれぞれ備えるステージ装置320によると、粗動ステージ332aをX軸方向に駆動する粗動ステージ駆動系323が、一軸駆動機構、一例としてボールねじを用いた送りねじ機構によって構成されているので、その送りねじ機構からの磁束漏れが生じるおそれはない。また、シャトル10が装着される微動ステージ332bを6自由度方向に駆動する微動ステージ駆動系327として、前述した閉磁界型かつムービングマグネット型のモータ327が用いられ、且つ該モータの上面及び両側面が、粗動ステージ332aに両端が固定された磁気シールド部材328で覆われているので、粗動ステージ332a及び微動ステージ332bの全移動範囲で上方への磁束漏れを効果的に抑制ないしは防止することが可能である。したがって、本実施形態では電子ビーム照射装置330のビーム源から射出される電子ビームの位置決めに対して無視できないほどの悪影響を与えるような磁場変動が生じるおそれはない。なお、本実施形態に係るステージ装置320は、上述のように上方への磁束漏れを効果的に抑制ないしは防止することができるので、電子ビーム露光装置、その他の荷電粒子線露光装置、あるいはSEM等に用いられるステージ装置として好適である。
また、本実施形態に係るステージ装置320では、微動ステージ332b(及びシャトル10)の自重を、定盤321上で支持する重量キャンセル装置324が設けられているので、微動ステージ(及びシャトル10)を駆動しないときにモータ327により自重を支持するための定常的な力を発生させる必要がなる。これにより、発熱が大きくなることによる不都合を防止できるとともに、磁力が電子ビームの位置決めに悪影響を与えることをさらに抑制ないしは防止することができる。
また、本実施形態に係る露光ユニット310では、シャトル10が微動ステージ322bに装着された状態では、微動ステージ322bの6自由度方向の位置情報は、シャトル10の位置情報を計測する前述のエンコーダシステムから成る第1計測系20で計測されている。エンコーダシステムは、干渉計と比べて計測ビームの光路長が極端に短いので、必要なスペースが小さく、第1計測系20の小型化が可能になる。また、第1計測系20は、前述の如く、合計12自由度の計測が可能であり、6自由度方向のそれぞれについて、冗長計測が行われ、各2つの位置情報が得られる。そして、露光制御装置380は、第1計測系20で計測された位置情報に基づいて、それぞれの自由度について各2つの位置情報の平均値を、それぞれの方向の計測結果とする。これにより、平均化効果により、6自由度の全ての方向について、シャトル10及び微動ステージ322bの位置情報を、高精度に求めることが可能になる。したがって、露光の際のウエハの位置制御性の向上が可能となり、高精度な露光が可能になる。
なお、本実施形態に係る露光ユニット310では、露光の際のウエハの位置制御性の向上が可能となることから、露光ユニット310は、ラインパターンの一部を除去し、紫外光露光装置の解像限界よりも微細な非周期的な部分を含むパターンの形成に好適に用いることができる。ここで、このようなパターン形成方法としては、例えば特開2011−258842号公報に開示されるように、第1段階として、例えばダブルパターニング法によってウエハ上の各ショット領域に線幅d(紫外光露光装置の解像限界よりも微細な線幅である)でピッチ2dのライン・アンド・スペースパターンを形成する。そして、第2段階として、その各ショット領域において、ライン・アンド・スペースパターンから電子ビーム露光装置による露光及びエッチングによって部分的にラインパターンを除去するパターンの形成方法等がある。
露光システム1000を用いて上記パターンの形成を行う場合、第1段階で例えばダブルパターニング法によってウエハ上の各ショット領域に例えば線幅10nmでピッチ20nmのライン・アンド・スペースパターンを形成した後、第2段階でそのウエハをターゲットとして、露光システム1000の各露光ユニット310を用いて非周期的な部分を露光することによって、紫外光露光装置の解像限界よりも微細な非周期的な部分(離間部)を含む回路パターンを効率的に形成できる。
なお、第1段階で用いられるダブルパターニング法は、ピッチ分割(Pitch Splitting)技術と、スペーサ・ピッチ・ダブリング(Spacer Pitch Doubling, Spacer transfer 又は SidewalL transfer)技術のいずれでも良い。また、第2段階で用いられるターゲットは、ダブルパターニング法に限らず、電子ビーム露光装置、あるいはEUV露光装置などを用いて、各ショット領域に線幅d(紫外光露光装置の解像限界よりも微細な線幅である)でピッチ2dのライン・アンド・スペースパターンが形成されたウエハであっても良い。
また、本実施形態に係る露光ユニット310では、微動ステージ322bの6自由度方向の位置情報を常時計測する第2計測系25が、第1計測系20とは別に設けられている。このため、シャトルが微動ステージ322bに装着されていないときにも、露光制御装置380i(i=2〜6)では、微動ステージ322bの6自由度方向の位置、姿勢の制御が可能である。
また、本実施形態に係る露光システム1000は、シャトル10上に保持された露光前のウエハに対する事前計測を行う計測室60と、シャトル10上のウエハに対する電子ビーム光学系を用いた露光が行われる露光室301iが内部にそれぞれ形成され、ロードロックチャンバ302をそれぞれ有する複数の真空チャンバ300iと、事前計測が終了したウエハ及び露光が終了したウエハを、シャトル10と一体で、計測室60と複数の真空チャンバ300iそれぞれのロードロックチャンバ302との間で搬送するシャトル搬送系70とを備えている。このため、真空チャンバ3002〜3006それぞれのロードロックチャンバ302内に搬入された事前計測が終了したウエハを保持するシャトル10を、露光室内搬送系312が各露光室301i内に搬入して微動ステージ322bに装着した後、ウエハのファインアライメント及びこの結果に基づく、ウエハの露光を直ちに開始することが可能になる。
また、本実施形態によると、図18から図27に基づいて説明したような手順で、露光室301i内のウエハのシャトルと一体の交換が行われ、特に、シャトルキャリア306の下段及び上段の収納棚に、露光前のウエハW1を保持するシャトル101及び露光済みのウエハW0を保持するシャトル100をそれぞれ収納することで両シャトル100、101を上下に並べ、そのシャトルキャリア306を上方(又は下方)に移動させることで、両シャトル100、101を同時に上方に移動させる手順(図22、図23参照)が採用されている。このため、露光室301iの空間を効率良く利用してウエハのシャトルと一体の交換を行うことができ、露光室301iの内部の容積(X軸方向及びY軸方向の寸法)を必要以上に大きくする必要がなくなる。この点において、フットプリントを小さくすることが可能になる。なお、本実施形態では、両シャトル100、101を上下に並べた状態で、同時に上方(又は下方)に移動させるため、シャトルキャリア306を用いたが、シャトルキャリア306を必ずしも用いる必要はなく、同様のことができるのであれば、そのための構成は特に問わない。例えばロボットにより両シャトル100、101を上下に並べた状態で、同時に上方(又は下方)に移動させても良い。
また、本実施形態に係る露光システム1000では、真空チャンバ3002〜3006の内部に各2つ収容された合計10機の露光ユニット310を備え、各露光ユニット310が、それぞれオン/オフ可能で、かつ偏向可能な例えば4000本の直径20nmの電子ビームの円形スポットを矩形(例えば100μm×20nm)の露光領域内に配置可能なマルチビーム光学系から成る光学系カラムが、例えば100個、例えば300mmウエハ上の例えば100個のショット領域にほぼ1:1で対応する位置関係で鏡筒331内に配置された電子ビーム照射装置330を備えている。したがって、合計10機の露光ユニット310により並行して別々のウエハの露光を行うことで、従来の電子ビーム露光装置に比べてスループットを大幅に向上させることができる。
また、本実施形態に係る露光システム1000では、露光室301iとは別の計測室60内で、露光に先立って、ウエハをシャトル10で保持した状態で、シャトルに対するウエハの位置関係の計測、及びウエハのフラットネス計測などの事前計測を行い、その後に各露光室301i内にその事前計測が終了したウエハを保持するシャトル10を搬入し、基準位置にある、微動ステージ332bに、キネマティックカップリングを介して装着するだけで、ウエハに対するアライメント計測及び露光を直ちに開始することができる。この点においても、従来に比べてスループットの向上が可能である。
また、本実施形態に係る露光システム1000によると、床面Fの下方から配線及び配管を介して供給されたユーティリティをチャンバ3001〜3006のそれぞれに分配する第1制御ラック200が、+X側の列のチャンバ3004〜3006に対して−Y側に隣接して、かつC/D9000に対向して−X側に配置されている。このため、2列のチャンバ3001〜3003及び3004〜3006側と、C/D9000側とのフットプリント(特に幅寸法(X軸方向の寸法))を揃えるレイアウトが可能となり、露光室用のチャンバを2列、C/D9000の長手方向の一側に配置しているにもかかわらず、C/D9000の長手方向と直交する方向の一側に使い勝手の悪い空きスペースを生じさせることがない。
また、2列のチャンバと、第1制御ラック200と、第2制御ラック500とを含む露光システム1000の構成部分は、C/D9000とともに、全体として直方体の空間を占めている。したがって、本実施形態では、クリーンルーム内に使い勝手が悪い空間が生じるのを回避して、空間の利用効率の向上を図ることが可能である。
また、第2制御ラック500により、上方からユーティリティをチャンバ3001〜3006のそれぞれに供給しているので次のような利点がある。すなわち、例えば電子ビーム照射装置330の鏡筒331には多くの電線(配線)を接続する必要があるが、かかる電線の接続を例えば下方から行おうとすると、粗微動ステージ332等を含むステージ装置320が存在し、邪魔になって、接続そのものに困難を伴う。これに対し、上方から鏡筒331に対して電線の接続を行う場合には、遮るものがないため、電線の本数が多くても容易に接続できる。
また、本実施形態に係る露光システム1000では、真空チャンバ300iの内部に、一対の露光ユニット310が収容されている。すなわち、真空チャンバ3002〜3006のそれぞれの内部にウエハWを保持するシャトル10が装着される移動可能な微動ステージ322bを含むステージ装置320のみならず、ステージ装置320とともに露光ユニット310を構成する、微動ステージ322b上のシャトル10に保持されたウエハに電子ビームを照射して露光する電子ビーム光学系を有する電子ビーム照射装置330の全体が、収容されている。したがって、大気圧が変動しても真空チャンバ300iの内部に全体が収容された鏡筒331が変形することはなく、鏡筒331内の電子ビーム光学系が悪影響を受けるなどの事態が発生するおそれはない。
なお、上記実施形態では、ステージ装置320が、磁界変動を抑制ないし防止するための構成として、粗動ステージ332aに両端が固定された磁気シールド部材328及び重量キャンセル装置324の両者を備えている場合について説明したが、例えば、磁気シールド部材328のみを備えていても良い。
なお、上記実施形態では、シャトル10と一体でウエハが、計測室60と各露光室301iとの間で、搬送される場合について説明したが、これ限らず、シャトル10と同様静電チャックを有する保持部材を、微動ステージ332b上にメカニカル固定しておき、ウエハを単独に搬送する露光装置でも、上記実施形態と同様にエンコーダシステムにより、その保持部材の例えば6自由度方向の位置情報を計測することとしても良い。この場合において、エンコーダシステムとして上記実施形態の第1計測系20と同様の構成のものを用いても良い。この場合、保持部材は搬送されないので、保持部材側にヘッド部を設け、保持部材の外部にヘッド部が対向し得るようにグレーティングプレートを設けても良い。
なお、露光済のウエハを保持するシャトルを計測室60に必ず戻す必要はない。例えば、計測室60とは別に、ウエハ搬出部を設け、このウエハ搬出部でシャトルからウエハを取り外しても良い。
また、上記実施形態では、微動ステージ332bが、粗動ステージ332aに対して6自由度方向に移動可能な場合について説明したが、これに限らず、微動ステージはXY平面内でのみ移動可能であっても良い。この場合、微動ステージの位置情報を計測する第1計測系20及び第2計測系25も、XY平面内の3自由度方向に関する位置情報を計測可能であっても良い。
また、上記実施形態では、第1計測系20により6自由度方向の各方向について、冗長計測を行い、それぞれの方向について得られた2つの位置情報の平均に基づいて、それぞれの方向の微動ステージの位置を求めるものとしたが、これに限らず、6自由度方向の各方向について、更なる冗長計測を行い、3つ以上の位置情報の平均に基づいて、それぞれの方向の微動ステージの位置を求めるものとしても良い。あるいは、6自由度方向の一部の方向、例えばXY平面内の3自由度方向についてのみ、冗長計測を行うようにしても良いし、いずれの方向についても冗長計測を行わなくても良い。
なお、上記実施形態において計測室60の内部に配置されていた各部は、チャンバ3001の内部に設けられなくても良く、要は、ウエハのシャトルに対する概略位置計測及びフラットネス計測などの事前計測を実行可能な前述した計測部65が、露光システムの一部にあれば良い。
また、上記実施形態で説明した事前計測の内容は一例に過ぎず、その他の計測内容を含めても良い。また、上記実施形態では、事前計測のために露光前のウエハが載置される計測ステージ装置30が、計測室内搬送系62(搬送部材)と協働して、シャトル10に対するウエハのロード及びシャトル10からのウエハのアンロードを行うロード・アンロード装置(32、34、TB)を有している場合について説明したが、これに限らず、事前計測に用いられる計測ステージSTとは別に、計測部の搬送部材と協働してシャトル10に対するウエハのロード及びシャトル10からのウエハのアンロードを行うロード・アンロード装置を設けても良い。また、計測部(上記実施形態における計測室60)内に、シャトル10の清掃装置を設けても良い。
なお、上記実施形態では、真空チャンバ300iの内部に、露光ユニット310が一対収容された場合について例示したが、これに限らず、1つの真空チャンバの内部に、露光ユニット310が1つ、あるいは3つ以上収容されていても良い。また、上記実施形態では、露光システム1000が、5つの露光室301iと1つの計測室60とを備えている場合について説明したが、露光室の数は、少なくとも1つあれば足りる。また、計測室60が内部に形成されたチャンバ3001が、各3つのチャンバから成る2列のチャンバの一部である場合について説明したが、チャンバ3001は、必ずしも、2列のチャンバの一部を構成していなくても良く、その設置場所は問わない。また、2列のチャンバ3001〜3003及び3004〜3006の全てを設ける必要はなく、例えばC/D9000に隣接するチャンバ3001と第1制御ラック200に隣接するチャンバ3004の2つのみが設けられていても良い。
なお、上記実施形態では、第1制御ラック200に加えて、第2制御ラック500が設けられた場合について説明したが、第2制御ラック500は、必ずしも設けなくても良い。第2制御ラック500が設けられていない場合には、第1制御ラック200により、床面Fの下方から配線及び配管を介して供給されたユーティリティをチャンバ3001〜3006のそれぞれに、上方から分配することが望ましい。
なお、チャンバの数は、チャンバ3001、3002の2つでも良く、この場合、第2制御ラック500は、チャンバ3001、3002の上方に設けられても良い。
なお、上記実施形態では、真空チャンバ3002〜3006それぞれの内部に、露光ユニット310の全体が収容された場合について説明したが、これに限らず、露光ユニット310のうち、電子ビーム照射装置330の鏡筒331の下端部を除く部分を、真空チャンバ3002〜3006それぞれの外部に露出させても良い。
なお、上記実施形態では、電子ビーム照射装置330がメトロロジーフレーム340と一体で、3つの吊り下げ支持機構350a、350b、350cを介して真空チャンバの天板(天井壁)から吊り下げ支持されるものとしたが、これに限らず、電子ビーム照射装置330は、床置きタイプのボディによって支持されても良い。
なお、上記実施形態では、露光前のウエハ及び露光済みのウエハを、いずれもシャトル10と一体で、全ての真空チャンバ3002〜3006と計測室60との間で搬送するものとしたが、これに限らず、露光前のウエハ及び露光済みのウエハを単独で、前述の空間SP内の移動経路に沿って移動する水平多関節ロボットなどから成るウエハ搬送系によって、全ての真空チャンバ3002〜3006と計測室60との間で搬送することとしても良い。この場合には、ウエハに対する1層目の露光のみならず、第2層目以降の露光をも可能にするためには、露光室301iの内部に電子ビーム照射装置330によるアライメントマークの検出を可能とするためのウエハに対する事前計測を行うための装置を配置する必要がある。シャトルと一体でウエハを搬送する場合、及びウエハを単独で搬送する場合のいずれにおいても、ウエハが搬送される前述の空間SPと該空間SPに連通する計測室60の一部とは、真空チャンバの内部に比べて真空度の低い低真空状態に設定可能に構成しても良い。大気中からロードロック室内にウエハ(及びシャトル)を搬入する場合、可能な限り短時間でロードロック室内を真空チャンバの内部と同程度の高真空状態になるまで真空引きする必要があり、この場合、ウエハ(及びシャトル)が置かれる環境は、大気圧から高真空に変化し、温度低下によりウエハが収縮する。一方、低真空空間からロードロック室内にウエハ(及びシャトル)を搬入した場合、その温度の低下割合が低くなり、温度低下に起因するウエハの収縮が小さくなる。
なお、上記実施形態では、ターゲットが半導体素子製造用のウエハである場合について説明したが、本実施形態に係る露光システム1000は、ガラス基板上に微細なパターンを形成してマスクを製造する際にも好適に適用できる。また、上記実施形態では、荷電粒子線として電子ビームを使用する電子ビーム露光システム1000について説明したが、露光用の荷電粒子線としてイオンビーム等を用いる露光装システムにも上記実施形態を適用することができる。