JP2016136016A - エンジンシステムおよび鞍乗型車両 - Google Patents
エンジンシステムおよび鞍乗型車両 Download PDFInfo
- Publication number
- JP2016136016A JP2016136016A JP2015240225A JP2015240225A JP2016136016A JP 2016136016 A JP2016136016 A JP 2016136016A JP 2015240225 A JP2015240225 A JP 2015240225A JP 2015240225 A JP2015240225 A JP 2015240225A JP 2016136016 A JP2016136016 A JP 2016136016A
- Authority
- JP
- Japan
- Prior art keywords
- crankshaft
- angle
- rotation
- engine
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000000203 mixture Substances 0.000 claims abstract description 22
- 238000002485 combustion reaction Methods 0.000 claims abstract description 13
- 238000000034 method Methods 0.000 claims description 50
- 230000008569 process Effects 0.000 claims description 49
- 238000001514 detection method Methods 0.000 claims description 47
- 239000007858 starting material Substances 0.000 claims description 25
- 230000006835 compression Effects 0.000 claims description 24
- 238000007906 compression Methods 0.000 claims description 24
- 238000006243 chemical reaction Methods 0.000 claims description 22
- 239000000446 fuel Substances 0.000 claims description 19
- 238000010248 power generation Methods 0.000 claims description 3
- 230000003247 decreasing effect Effects 0.000 abstract description 2
- 230000007423 decrease Effects 0.000 description 13
- 230000006870 function Effects 0.000 description 11
- 238000013459 approach Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 8
- 230000008859 change Effects 0.000 description 7
- 238000004880 explosion Methods 0.000 description 5
- 238000007562 laser obscuration time method Methods 0.000 description 4
- 230000000630 rising effect Effects 0.000 description 4
- 230000001360 synchronised effect Effects 0.000 description 4
- 239000003990 capacitor Substances 0.000 description 3
- 239000000470 constituent Substances 0.000 description 3
- 230000004907 flux Effects 0.000 description 3
- 238000009499 grossing Methods 0.000 description 3
- 230000033001 locomotion Effects 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 238000004804 winding Methods 0.000 description 3
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 230000005669 field effect Effects 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 230000007659 motor function Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images











Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
Landscapes
- Combined Controls Of Internal Combustion Engines (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Output Control And Ontrol Of Special Type Engine (AREA)
- Hybrid Electric Vehicles (AREA)
Abstract
Description
図1は、本発明の一実施の形態に係る自動二輪車の概略構成を示す模式的側面図である。図1の自動二輪車100においては、車体1の前部にフロントフォーク2が左右方向に揺動可能に設けられる。フロントフォーク2の上端にハンドル4が取り付けられ、フロントフォーク2の下端に前輪3が回転可能に取り付けられる。
図2は、エンジンシステム200の構成について説明するための模式図である。図2に示すように、エンジンユニットEUは、エンジン10および回転電機30を含む。エンジン10は、ピストン11、コンロッド(コネクティングロッド)12、クランク軸13、吸気バルブ15、排気バルブ16、バルブ駆動部17、点火プラグ18およびインジェクタ19を備える。
図3は、ECU6、回転電機30および複数の角度センサAS1,AS2,AS3,AS4の構成を示す模式図である。図3に示すように、ECU6は、CPU(中央演算処理装置)、ROM(リードオンリメモリ)62、RAM(ランダムアクセスメモリ)63、電機駆動部64、変換部65および平滑コンデンサ66を含む。回転電機30は、U相、V相およびW相のコイルU,V,Wを含む。回転電機30は、三相同期電動機として機能するとともに、三相同期発電機として機能する。
本例のエンジン10の通常動作時には、クランク軸13が正方向に2回転することにより、吸気行程、圧縮行程、膨張行程および排気行程からなる1サイクルの動作が行われる。
エンジン10が停止すると、混合気の燃焼が停止された状態でクランク軸13が正方向に回転するので、クランク軸13は図4(b)の角度A45で停止しやすい。この場合、エンジン10の始動時にクランク軸13を正方向に回転させようとすると、クランク角が角度A45から角度A5を超えるために大きな正方向のトルクが必要になる。
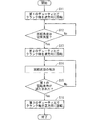
図6は、図3の電機制御部611によるエンジン10の始動処理を示すフローチャートである。本始動処理は、図2のメインスイッチ41がオンされかつスタータスイッチ42がオンされることにより、図3のROM62に記憶された制御プログラムに基づいて実行される。図6の始動処理の例では、エンジン10の始動前にクランク角が図4(b)の角度A45にある状態でクランク軸13が停止していると仮定される。
図7(a)はクランク軸13の回転中心線に沿った回転電機30の模式的断面図であり、図7(b)は図7(a)のA−A線断面図であり、図7(c)は図7(a)のB−B線断面図である。
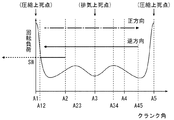
以下の説明では、図2のピストン11の上死点と下死点との中間点を中間位置と呼ぶ。図4(b)に示されるように、角度A1,A5を含む一定領域では、ピストン11が上死点またはその近傍に位置し、筒内圧による回転負荷がクランク軸13に作用する。そのため、ピストン11が中間位置よりも上死点に近い位置にあるときは、筒内圧によりクランク軸13の回転速度が変化しやすい。一方、ピストン11が中間位置よりも下死点に近い位置にあるときには、クランク軸13に作用する回転負荷が比較的小さい。したがって、クランク軸13の回転速度の変化が比較的小さい。
図10は、図3の電機制御部611によるエンジン10の始動処理の他の例を示すフローチャートである。図11は、クランク角が排気上死点またはその近傍にある状態でクランク軸が停止している場合の切替角度を示す図である。図11では、縦軸が回転負荷を表し、横軸がクランク角を表す。図12の始動処理の例は、エンジン10の始動前にクランク軸13の停止位置が不明である場合に適用される。本例においても、図9の基準位置がクランク角A2およびクランク角A4にある。図11の例が図6の例と異なるのは、ステップS31,S32が追加された点である。
上記のエンジンシステム200においては、エンジン10の始動時における混合気の点火前に、クランク軸13が逆方向に回転するように第1のデューティ比で回転電機30に電流が供給される。位置判定部612により検出される回転角度が切替角度になると、回転電機30に供給される電流のデューティ比が第1のデューティ比から第2のデューティ比に切り替えられる。それにより、回転電機30からクランク軸13に与えられる逆方向のトルクが減少する。その結果、筒内圧による回転負荷によりクランク軸13の逆方向への回転が停止される。その後、クランク軸13の回転状態が予め定められた第1の回転条件を満たすことにより、クランク軸13が正方向に回転する。それにより、クランク角が最初の圧縮上死点に対応する角度A5を超える。
(11−1)上記の実施の形態では、クランク軸13が逆方向に回転された後回転角度が切替角度になったときに、デューティ比が第1のデューティ比D1から第2のデューティ比D2に切り替えられる。それにより、回転電機30からクランク軸13に与えられる逆方向のトルクが小さくなることによりクランク軸13の逆方向の回転速度が低下する。本発明は上記の実施の形態に限られない。
以下、請求項の各構成要素と実施の形態の各要素との対応の例について説明するが、本発明は下記の例に限定されない。
参考形態に係るエンジンシステムは、バッテリを備えた車両に搭載されるエンジンシステムであって、燃焼停止状態での4ストロークの間に高負荷領域と低負荷領域とを有し、高負荷領域においてクランク軸に作用する第1の回転負荷は、低負荷領域においてクランク軸に作用する第2の回転負荷よりも大きい4ストロークのエンジンと、バッテリから電流の供給を受けてクランク軸を回転させることができ、かつクランク軸の回転に伴う発電によりバッテリを充電することができるように構成された回転電機と、クランク角を検出するクランク角検出部と、バッテリから回転電機に電流を供給することによりクランク軸が正方向または逆方向に回転するように回転電機を制御する制御装置とを備え、制御装置は、エンジンの始動時における混合気の点火前に、低負荷領域において第2の回転負荷に抗してクランク軸が逆方向に回転するように回転電機に電流を供給する第1の制御を行った後、高負荷領域における第1の回転負荷によりクランク軸の逆方向の回転が停止するようにクランク角検出部により検出されたクランク角が予め定められた切替角度になったときに回転電機からクランク軸に与えられるトルクを調整する第2の制御を行い、その後クランク軸が正方向に回転するように回転電機に電流を供給する第3の制御を行うものである。
2 フロントフォーク
3 前輪
4 ハンドル
5 シート
6 ECU
7 バッテリ
8 後輪
10 エンジン
11 ピストン
12 コンロッド
13 クランク軸
15 吸気バルブ
16 排気バルブ
17 バルブ駆動部
18 点火プラグ
19 インジェクタ
20 シリンダ
21 燃焼室
22 吸気口
23 吸気通路
24 排気口
25 排気通路
30 回転電機
30c,U,V,W コイル
31 ステータ
31a 歯部
32 ロータ
32a ロータ本体
32b 第1磁極
32c 第2磁極
32n 第2の部分
32s 第1の部分
41 メインスイッチ
42 スタータスイッチ
43 吸気圧力センサ
61 CPU
62 ROM
63 RAM
64 電機駆動部
65 変換部
66 平滑コンデンサ
100 自動二輪車
200 エンジンシステム
611 電機制御部
612 位置判定部
A1,A2,A3,A4,A5,A12,A23,A34,A45 角度
AR1,AR2,AR3,AR4 検出領域
AS1,AS2,AS3,AS4 角度センサ
D1 第1のデューティ比
D2 第2のデューティ比
D3 第3のデューティ比
D4 第4のデューティ比
D5 第5のデューティ比
EU エンジンユニット
HU,HV,HW,CRK 信号
N1,N2,N3,N4,N5 ノード
Q1,Q2,Q3,Q4,Q5,Q6 スイッチング素子
SW,SW1 切替角度
TV スロットルバルブ
Claims (13)
- バッテリを備えた車両に搭載されるエンジンシステムであって、
燃焼停止状態での4ストロークの間に高負荷領域と低負荷領域とを有し、前記高負荷領域においてクランク軸に作用する第1の回転負荷は、前記低負荷領域において前記クランク軸に作用する第2の回転負荷よりも大きい4ストロークのエンジンと、
前記バッテリから電流の供給を受けて前記クランク軸を回転させることができ、かつ前記クランク軸の回転に伴う発電により前記バッテリを充電することができるように構成された回転電機と、
前記クランク軸の回転角度を検出する回転角度検出部と、
前記バッテリから前記回転電機に電流を供給することにより前記クランク軸が正方向または逆方向に回転するように前記回転電機を制御する制御装置とを備え、
前記制御装置は、前記エンジンの始動時における混合気の点火前に、前記回転電機に電流を供給して前記低負荷領域において前記第2の回転負荷に抗して前記クランク軸を最初に逆方向に回転させる第1の制御を行った後、前記高負荷領域における前記第1の回転負荷により前記クランク軸の逆方向の回転が停止するように、前記回転角度検出部により検出された回転角度が予め定められた切替角度になったときに前記回転電機に供給する電流の調整により前記回転電機から前記クランク軸に与えられるトルクを低下させて前記高負荷領域において前記クランク軸を逆方向に回転させる第2の制御を行い、その後前記クランク軸が正方向に回転するように前記回転電機に電流を供給する第3の制御を行う、エンジンシステム。 - 前記制御装置は、
前記第1の制御において、第1のデューティ比で前記回転電機に電流を供給することにより前記クランク軸を逆方向に回転させ、
前記第2の制御において、前記回転角度検出部により検出された回転角度が前記切替角度になったときに前記回転電機に供給される電流のデューティ比を前記第1のデューティ比から前記第1のデューティ比よりも低い第2のデューティ比に切り替える、請求項1記載のエンジンシステム。 - 前記第1の回転負荷は、圧縮行程における圧力による第1のピークを有し、
前記第2の回転負荷は、排気バルブの反力による第2のピークを有し、
前記切替角度は、前記第2のピークに対応する角度以下でかつ前記第1のピークに対応する角度よりも大きい角度で前記第1のデューティ比から前記第2のデューティ比への切り替えが行われるように設定される、請求項1または2記載のエンジンシステム。 - 前記第2のデューティ比は0である、請求項3記載のエンジンシステム。
- 前記制御装置は、
前記第2の制御において、前記回転角度検出部により検出された回転角度が前記切替角度になったときに前記クランク軸に正方向のトルクが与えられるように前記回転電機に電流を供給する、請求項1〜4のいずれか一項に記載のエンジンシステム。 - 前記制御装置は、
前記第2の制御において、前記回転角度検出部により検出された回転角度が前記切替角度になったときに前記クランク軸に正方向のトルクが与えられるように前記回転電機を短絡させる、請求項1〜4のいずれか一項に記載のエンジンシステム。 - 前記回転角度検出部は、
前記クランク軸とともに回転する回転部材と、
前記回転部材に設けられる第1の被検出体と、
前記回転部材の回転方向に沿って前記回転部材に設けられる複数の第2の被検出体と、
前記回転部材の回転時に前記第1の被検出体を検出可能に設けられる第1の検出器と、
前記回転部材の回転時に前記複数の第2の被検出体を検出可能に設けられる第2の検出器と、
前記第1の検出器による前記第1の被検出体の検出および前記第2の検出器による前記第2の被検出体の検出に基づいて前記回転角度を判定する判定部とを含み、
前記第1の被検出体は、ピストンが下死点と上死点との間の中間位置よりも下死点に近い位置にあるときに前記第1の検出器により検出されるように配置される、請求項1〜6のいずれか一項に記載のエンジンシステム。 - 前記クランク軸の回転状態を検出する回転状態検出部をさらに備え、
前記制御装置は、前記クランク軸が前記第2の制御により逆方向に回転する際に、前記回転状態検出部により検出される回転状態が予め定められた第1の条件を満たしたときに前記第3の制御を開始する、請求項1〜7のいずれか一項に記載のエンジンシステム。 - 前記制御装置は、前記第1の制御の後に前記回転状態検出部により検出される回転状態が予め定められた第2の条件を満たしたときに前記第2の制御を行わずに前記第3の制御を開始する、請求項8記載のエンジンシステム。
- 前記制御装置は、前記エンジンの始動時における混合気の点火前に、始動処理が開始されると、最初に前記第1の制御を行った後、前記第2の制御を行い、その後前記第3の制御を行う、請求項1〜9のいずれか一項に記載のエンジンシステム。
- 前記制御装置をオン状態またはオフ状態にするためにオンまたはオフされるメインスイッチをさらに備え、
前記制御装置は、前記メインスイッチがオンされ、かつ、前記エンジンの始動時における混合気の点火前に、前記始動処理を開始し、前記始動処理では、最初に前記第1の制御を行った後、前記第2の制御を行い、その後前記第3の制御を行う、請求項10記載のエンジンシステム。 - 運転者によって操作可能なスタータスイッチを備え、
前記制御装置は、前記メインスイッチがオンされ、かつ、前記スタータスイッチがオンされ、かつ、前記エンジンの始動時における混合気の点火前に、前記第1の制御、前記第2の制御および前記第3の制御を行う、請求項11記載のエンジンシステム。 - 駆動輪およびバッテリを有する本体部と、
前記駆動輪を回転させるための動力を発生する請求項1〜12のいずれか一項に記載のエンジンシステムとを備える、鞍乗型車両。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015240225A JP5876188B1 (ja) | 2015-01-14 | 2015-12-09 | エンジンシステムおよび鞍乗型車両 |
| TW105100593A TWI573933B (zh) | 2015-01-14 | 2016-01-08 | 引擎系統及跨坐型車輛 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015004671 | 2015-01-14 | ||
| JP2015004671 | 2015-01-14 | ||
| JP2015240225A JP5876188B1 (ja) | 2015-01-14 | 2015-12-09 | エンジンシステムおよび鞍乗型車両 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP5876188B1 JP5876188B1 (ja) | 2016-03-02 |
| JP2016136016A true JP2016136016A (ja) | 2016-07-28 |
Family
ID=55434724
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015240225A Active JP5876188B1 (ja) | 2015-01-14 | 2015-12-09 | エンジンシステムおよび鞍乗型車両 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP5876188B1 (ja) |
| TW (1) | TWI573933B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018179122A1 (ja) * | 2017-03-29 | 2018-10-04 | 本田技研工業株式会社 | 動力伝達装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2002027181A1 (ja) * | 2000-09-28 | 2004-02-05 | 株式会社ミツバ | エンジン始動装置 |
| JP3824132B2 (ja) * | 2000-10-26 | 2006-09-20 | 本田技研工業株式会社 | エンジン始動制御装置 |
| JP4819633B2 (ja) * | 2006-09-26 | 2011-11-24 | ヤマハ発動機株式会社 | 鞍乗型車両用のベルト式無段変速機及び鞍乗型車両 |
| JP4430658B2 (ja) * | 2006-12-22 | 2010-03-10 | 本田技研工業株式会社 | V型エンジン |
| JP2009024540A (ja) * | 2007-07-18 | 2009-02-05 | Kokusan Denki Co Ltd | エンジン始動装置 |
| JP5708347B2 (ja) * | 2011-07-29 | 2015-04-30 | 株式会社デンソー | 単気筒エンジンの行程判別装置 |
-
2015
- 2015-12-09 JP JP2015240225A patent/JP5876188B1/ja active Active
-
2016
- 2016-01-08 TW TW105100593A patent/TWI573933B/zh active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018179122A1 (ja) * | 2017-03-29 | 2018-10-04 | 本田技研工業株式会社 | 動力伝達装置 |
| US11401976B2 (en) | 2017-03-29 | 2022-08-02 | Honda Motor Co., Ltd. | Power transmitting device |
Also Published As
| Publication number | Publication date |
|---|---|
| TW201632721A (zh) | 2016-09-16 |
| JP5876188B1 (ja) | 2016-03-02 |
| TWI573933B (zh) | 2017-03-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5035895B2 (ja) | 発電制御装置 | |
| TWI551776B (zh) | Engine unit and vehicle | |
| TWI528680B (zh) | Engine unit and vehicle | |
| JP5929342B2 (ja) | 車両の始動制御装置 | |
| TW200922111A (en) | Control device for a generator driven by a four-stroke cycle engine | |
| JP5876188B1 (ja) | エンジンシステムおよび鞍乗型車両 | |
| JP6019246B2 (ja) | エンジン始動制御装置 | |
| US11280307B2 (en) | Engine drive system | |
| JP2006129680A (ja) | 発電機の制御装置、発電機の制御方法及び自動二輪車 | |
| TWI646257B (zh) | 引擎控制裝置、引擎單元及車輛 | |
| JP5974906B2 (ja) | エンジンの自動停止制御装置 | |
| JP2017036666A (ja) | エンジンユニット | |
| JP2019152147A (ja) | 鞍乗型車両用エンジンユニットおよび鞍乗型車両 | |
| JP2020152120A (ja) | ビークル | |
| TWI660118B (zh) | vehicle | |
| JP5929414B2 (ja) | エンジン駆動車両用モータジェネレータ制御装置 | |
| JP5373449B2 (ja) | 三相モータ制御装置 | |
| JP2007085238A (ja) | エンジン制御装置 | |
| JP6749501B2 (ja) | 始動制御装置 | |
| JP2020152121A (ja) | ビークル | |
| JP2018053773A (ja) | 鞍乗型車両 | |
| JP2019052538A (ja) | ビークル | |
| JP2017036665A (ja) | エンジンユニット | |
| JP2021080842A (ja) | エンジン始動制御装置 | |
| JP2023167603A (ja) | 車両制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151209 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20151209 |
|
| TRDD | Decision of grant or rejection written | ||
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20160104 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160120 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5876188 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |