JP2016116271A - 電動車両の制御装置 - Google Patents
電動車両の制御装置 Download PDFInfo
- Publication number
- JP2016116271A JP2016116271A JP2014251313A JP2014251313A JP2016116271A JP 2016116271 A JP2016116271 A JP 2016116271A JP 2014251313 A JP2014251313 A JP 2014251313A JP 2014251313 A JP2014251313 A JP 2014251313A JP 2016116271 A JP2016116271 A JP 2016116271A
- Authority
- JP
- Japan
- Prior art keywords
- deceleration
- electric vehicle
- control
- driver
- notification
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
【課題】運転者に煩わしさを感じさせることなく適切なタイミングで回生制動量が抑制されていることを運転者に報知することができる電動車両の制御装置を提供する。
【解決手段】電動機の回生制動制御を実行すると共に、回生制動制御を実行する際のバッテリの電圧が所定値以下となるように電動機による回生制動量を抑制する回生抑制制御を実行する電動機制御手段11と、車体の姿勢、アクセル開度及び車両速度に基づいて想定減速度を設定する想定減速度設定手段12と、車両の実減速度が想定減速度よりも小さい場合に、回生抑制制御が実行されていることを運転者に報知する報知制御手段13と、を備える構成とする。
【選択図】図2
【解決手段】電動機の回生制動制御を実行すると共に、回生制動制御を実行する際のバッテリの電圧が所定値以下となるように電動機による回生制動量を抑制する回生抑制制御を実行する電動機制御手段11と、車体の姿勢、アクセル開度及び車両速度に基づいて想定減速度を設定する想定減速度設定手段12と、車両の実減速度が想定減速度よりも小さい場合に、回生抑制制御が実行されていることを運転者に報知する報知制御手段13と、を備える構成とする。
【選択図】図2
Description
本発明は、走行用モータ(電動機)が搭載された電動車両の制御装置に関し、より詳しくは、電動車両の利用者、特に運転者に対して、回生制動量が抑制された状態であることを適切に報知する技術に関する。
電動車両には、例えば、走行用モータ(電動機)を駆動装置として備えた電気自動車(EV)や、走行用モータとエンジンとを駆動装置として備えたハイブリッド電気自動車(HEV)等がある。これらの電動車両において走行用モータは、バッテリからの電力によって電動車両を走行させるための駆動力を発生する一方、例えば、減速時等には発電機として作動して回生制動力を発生させるように構成されているものがある。
走行用モータを発電機として作動した際の回生電力はバッテリに供給されてバッテリの充電を行う。ただし、バッテリが満充電に近くなると、バッテリの過充電の発生等を防止しバッテリを保護するため、回生制動量を抑制する制御が実施されている。この回生制動量の抑制に伴い、運転者が期待する減速感が得られない虞、すなわち運転者にドライバビリティが悪化したと感じさせてしまう虞がある。
このような問題を解消するために、回生制動量が抑制されている場合には、そのことを運転者に対して報知するようにしたものがある(例えば、特許文献1参照)。
しかしながら、回生制動量が抑制されている場合であっても運転者の期待する減速感が得られる状態もある。このような状態での運転者に対する報知は、運転者にとっては不要な報知であり、運転者に煩わしさを感じさせてしまう虞がある。
本発明は、このような事情に鑑みてなされたものであり、運転者に煩わしさを感じさせることなく適切なタイミングで回生制動量が抑制されていることを運転者に報知することができる電動車両の制御装置を提供することを目的とする。
上記課題を解決する本発明の第1の態様は、充電可能なバッテリと、該バッテリに電気的に接続されて出力軸が車両の駆動輪に連結された電動機と、車両の加速度を検出する加速度センサと、を有する電動車両の制御装置であって、前記電動機の回生制動制御を実行すると共に、該回生制動制御を実行する際の前記バッテリの電圧が所定値以下となるように前記電動機による回生制動量を抑制する回生抑制制御を実行する電動機制御手段と、車体の姿勢、アクセル開度及び車両速度に基づいて想定減速度を設定する想定減速度設定手段と、前記加速度センサによって検出される車両の実減速度が前記想定減速度よりも小さい場合に、前記電動機制御手段によって前記回生抑制制御が実行されていることを運転者に報知する報知制御手段と、を備えることを特徴とする電動車両の制御装置にある。
本発明の第2の態様は、第1の態様の電動車両の制御装置において、前記想定減速度設定手段は、前記車両速度が所定値以下である場合には、さらにブレーキペダルストロークに基づいて前記想定減速度を設定することを特徴とする電動車両の制御装置にある。
本発明の第3の態様は、第1又は2の態様の電動車両の制御装置において、前記報知制御手段は、前記実減速度の前記想定減速度に対する割合である減速ゲインが第1の閾値以下である場合に、前記運転者に対する報知を実行することを特徴とする電動車両の制御装置にある。
本発明の第4の態様は、第3の態様の電動車両の制御装置において、前記報知制御手段は、前記減速ゲインが前記第1の閾値以下になった後、当該第1の閾値よりも大きい第2の閾値以上になった場合に、前記運転者に対する報知を終了することを特徴とする電動車両の制御装置にある。
本発明の第5の態様は、第1又は2の態様の電動車両の制御装置において、前記報知制御手段は、前記実減速度と前記想定減速度との差である減速度差が第3の閾値以上である場合に前記運転者に対する報知を実行することを特徴とする電動車両の制御装置にある。
本発明の第6の態様は、第5の態様の電動車両の制御装置において、前記報知制御手段は、前記減速度差が前記第3の閾値以上になった後、当該第3の閾値よりも小さい第4の閾値以下になった場合に、前記運転者に対する報知を終了することを特徴とする電動車両の制御装置にある。
かかる本発明では、運転者に煩わしさを感じさせることなく、回生制動量が抑制されていることを適切なタイミングで運転者に報知することができる。
以下、本発明の一実施形態について図面を参照して詳細に説明する。
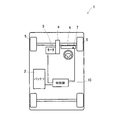
まずは、本実施形態に係る電動車両の全体構成について説明する。図1に示すように、本実施形態に係る電動車両1は、電気自動車(EV)であり、二次電池であるバッテリ2と、このバッテリ2からの電力供給により作動する電動機である走行用モータ3と、を備える。走行用モータ3は、例えば、自動変速機4を介して駆動輪(本実施形態では、前輪)5に連結されている。走行用モータ3は、自動変速機4を介して駆動輪5を駆動させる一方、いわゆる回生制動制御時には、駆動輪5からの回転を受けて発電し、その電力をバッテリ2に供給する。このような走行用モータ3とバッテリ2との間の電力の受給は、制御部10によって制御される。例えば、回生制動制御時には、制御部10は、詳しくは後述するが所定のタイミングで回生抑制制御を実行し、電動車両1の走行状態に応じて走行用モータ3からバッテリ2への電力供給量を抑制することで、バッテリ2の過電流等の発生を抑制している。
ここで、このような回生抑制制御を実行する場合、それに伴って回生制動量が低下して運転者の期待する減速感が得られない虞がある。そこで、本発明に係る制御装置では、回生抑制制御を実行した場合に、運転者が煩わしさを感じない程度の適切なタイミングで、回生抑制制御を実行していることを報知するようにした。
制御部10は、本発明に係る電動車両の制御装置を構成する。この制御部10は、電動車両1に設けられた各種センサ、例えば、アクセルペダル31のストローク(APS)を検出するアクセルペダルストロークセンサ32、ブレーキペダル33のストローク(BPS)を検出するブレーキペダルストロークセンサ34、電動車両1の車速を検出する車速センサ35、電動車両1の加速度を検出する加速度センサ36と、走行用モータ3の回転数を検出する回転数検出センサ37、バッテリ2の電圧を検出するバッテリ電圧センサ38、バッテリ2の温度を検出するバッテリ温度センサ39、電動車両1の車体の傾き(路面の勾配)を検出する勾配センサ40等からの信号に基づいて電動車両1の走行状態を的確に把握し、それに基づいて走行用モータ3等の各種装置を制御する。なお上記の各種センサ類は、既存のものを採用すればよい。
図2に示すように、制御部10は、具体的には、モータ制御手段(電動機制御手段)11と、想定減速度設定手段12と、報知制御手段13と、を備えている。
モータ制御手段11は、乗員のペダル操作、例えば、アクセルペダル31の開度に応じた電力を、バッテリ2から走行用モータ3に供給して走行用モータ3の作動状態を制御する。またモータ制御手段11は、電動車両1の減速時には、走行用モータ3の回生制動制御を実行する。例えば、アクセルペダルストロークセンサ32からの信号に基づいてアクセルペダル31の踏み込みが解除されたことを検出すると、モータ制御手段11が走行用モータ3の回生制動制御を実行する。この回生制動制御では、駆動輪5の回転によって走行用モータ3を作動させて発電し、発電した回生電力でバッテリ2を充電することで、所望量の回生制動力(回生トルク)を発生させる。
またモータ制御手段11は、回生制動制御を実行する際のバッテリ2の電圧が所定値以下となるように走行用モータ3による回生制動量を抑制する回生抑制制御を所定のタイミングで実行する。すなわちモータ制御手段11は、バッテリ電圧センサ38からの信号に基づいて所定のタイミングで回生制動量を抑制し、バッテリ2の電圧が所定値を超えない範囲で回生制動力を発生させている。このように回生制動量を適宜抑制することで、例えば、バッテリ2の充電状態(SOC)が満充電に近い状態であっても、バッテリ2の過充電等の問題が発生するのを防止することができる。
さらにモータ制御手段11は、走行に係わる高電圧システム(駆動用バッテリ、モータおよびモータコントロールユニット:MCU)が高温のときにも、高電圧システム保護のために回生トルクを抑制する。具体的には、電池セル温度、モータコイル温度、IGBT温度、MUC・CPU温度、MCU内コンデンサ温度および冷却水温度を監視し、モータ制御手段11は、これらの温度に応じて回生抑制制御を実行する。また高電圧システム保護のため、モータ制御手段11は、MCU内コンデンサ電圧が高電圧システム上限電圧に達しないよう、回生トルクを抑制する(ただし、当然、高電圧システムの上限電圧は、駆動用バッテリの上限電圧に対し、高く設定される)。
またモータ制御手段11は、バッテリ温度センサ39からの信号に基づいて所定のタイミングで回生抑制制御を実行する。具体的には、モータ制御手段11は、例えば、バッテリ2の温度が所定温度(例えば、0℃程度)よりも低いバッテリ低温時にも、回生制動量を抑制してバッテリ2の電圧の上昇を抑制する。バッテリ低温時にバッテリ2の電圧が過度に上昇するかもしくはバッテリ2に対する入力電流が過度に増大すると、バッテリ(セル)の電極にリチウムが析出し易く、析出したリチウム(デンドライト)によって電池性能の低下や、内部短絡が生じる虞があるためである。
また本実施形態に係るモータ制御手段11は、トルク算出手段14を備えている。トルク算出手段14は、アクセルペダルストロークセンサ32、ブレーキペダルストロークセンサ34、車速センサ35、加速度センサ36、回転数検出センサ37、勾配センサ40等の検出結果に基づいて、電動車両1の走行状態に応じたモータトルクを算出する。例えば、電動車両1の加速時には、トルク算出手段14は、プラス方向のトルク(力行トルク)を算出し、電動車両1の減速時には、マイナス方向のトルク(回生トルク(回生制動量))を算出する。そしてモータ制御手段11は、このトルク算出手段によって算出されたモータトルクが発生するように、走行用モータ3を適宜制御する。
上述した回生抑制制御を実行している場合には、トルク算出手段14は、上記のようにモータトルクを算出すると共に、このモータトルクを所定の割合で減少させた抑制後モータトルクを算出する。そしてモータ制御手段11は、この抑制後モータトルクが発生するように走行用モータ3を適宜制御する。
想定減速度設定手段12は、車体の姿勢、例えば、車体の傾き(路面の勾配)と、アクセル開度と、車両速度と、に基づいて想定減速度を設定する。すなわち、ここでいう「想定減速度」とは、少なくとも車体の姿勢、アクセル開度、車両速度を含む車両の走行状態を特定するパラメータに基づいて求められる(想定される)減速度のことをいう。
そして本実施形態では、想定減速度設定手段12は、車速センサ35によって検出される車両速度が所定速度よりも速い場合には、上述した勾配センサ40、アクセルペダルストロークセンサ32及び車速センサ35の検出結果に基づいて想定減速度a1を設定する。また車両速度が所定速度以下である場合には、上述した勾配センサ40、アクセルペダルストロークセンサ32及び車速センサ35の検出結果と共に、ブレーキペダルストロークセンサ34の検出結果に基づいて想定減速度a2を設定する。
すなわち想定減速度設定手段12は、車両速度に応じた二種類のパラメータで、想定減速度a1,a2を設定する。想定減速度a2は、パラメータが想定減速度a1よりも多いことで想定減速度a1よりも大きい値に設定され易くなる。
想定減速度a1,a2の設定方法は、特に限定されず、例えば、所定の計算式から想定減速度a1,a2を演算し設定するようにしてもよいし、或いは、予め記憶されたマップを参照して想定減速度a1,a2を設定するようにしてもよい。なお計算式及びマップは、想定減速度a1,a2のそれぞれに対応して記憶しておく。
報知制御手段13は、上述のようにモータ制御手段11によって回生抑制制御が実行されている場合に、そのことを所定のタイミングで運転者に対して報知する。具体的には、報知制御手段13は、加速度センサ36によって検出される電動車両1の実際の減速度(実減速度)が上記想定減速度よりも小さい場合に、モータ制御手段11によって回生抑制制御が実行されていることを運転者に報知する。
本実施形態では、報知制御手段13は、実減速度の想定減速度に対する割合である減速ゲイン(実減速度/想定減速度)が、予め設定された第1の閾値(1よりも小さい値)以下である場合に、運転者に対する報知を実行する。すなわち実減速度が想定減速度よりも小さい場合でも、減速ゲインが第1の閾値よりも大きければ運転者に対する報知は行わず、減速ゲインが第1の閾値以下になると運転者に対する報知を実行する。さらに報知制御手段13は、減速ゲインが第1の閾値以下になった後、第1の閾値よりも大きい第2の閾値(1よりも小さい値)以上になった場合に、運転者に対する報知を終了する。
ここで、上述したように想定減速度設定手段12は、車両速度に応じた二種類の想定減速度a1,a2を設定し、想定減速度a2は、想定減速度a1よりも大きな値になり易い。このため想定減速度a2に基づいて演算された減速ゲインは、想定減速度a1に基づいて演算された減速ゲインに比べて、第1の閾値以下になり易くなる。すなわち車速が所定速度以下である場合には、報知制御手段13によって運転者に対する報知が実行され易くなっている。
なお本実施形態では、インストゥルメントパネル6に各種メータ類と共に設けられるインジケータ7を点灯させることで、回生抑制制御が実行されていることを運転者に報知している。勿論、報知の方法は特に限定されず、回生抑制制御が実行されていることを運転者が認識することができるものであればよい。
次に、図3のフローチャートを参照して、本実施形態に係る電動車両の制御装置による報知制御の一例についてさらに説明する。
まず電動車両1の走行中の所定のタイミングで、回生トルクを出力中であるか否かを判定する(ステップS1)。この判定のタイミングは適宜決定されればよいが、例えば、ブレーキペダルが踏み込まれたタイミングで行われる。ここで、回生トルクを出力中であれば(ステップS1:Yes)、次いでステップS2で電動車両1の車速が所定速度以下であるか否かを判定する。このとき車速が所定速度よりも大きい場合には(ステップS2:No)、ステップS3に進み、アクセルペダル開度(APS)、車速、車体の傾きからその時点における想定減速度a1を設定する。
一方ステップS2で車速が所定速度以下である場合には(ステップS2:Yes)、ステップS4に進み、アクセルペダル開度(APS)、車速、車体の傾きと共に、ブレーキペダルストローク(BPS)に基づいて想定減速度a2を設定する。
次いでステップS5に進み、減速ゲインを演算する。すなわち加速度センサによって検出される実減速度と、ステップS3又はステップS4で設定された想定減速度と、からこれらの比である減速ゲイン(実減速度/想定減速度)を演算する。
ステップS6では、この減速ゲインが点灯閾値(第1の閾値)以下であるか否かを判定する。減速ゲインが点灯閾値以下であれば(ステップS6:Yes)、ステップS7に進む。ステップS7では、インジケータ(警告灯)7が点灯中であるか否かを判定し、点灯中でなければ(ステップS7:No)、ステップS8に進み、一定時間経過後にインジケータ7を点灯させる。つまり運転者に対する報知を実行する。その後ステップS1に戻る。ステップS7でインジケータ7が点灯中であれば(ステップS7:Yes)、点灯状態をそのまま維持してステップS1に戻る。
ステップS6で、減速ゲインが点灯閾値よりも大きい場合には(ステップS6:No)、ステップS9に進み、減速ゲインが消灯閾値(第2の閾値)以上であるか否かを判定する。減速ゲインが消灯閾値以上であれば(ステップS9:Yes)、ステップS10に進む。ステップS10では、インジケータ7が点灯中であるか否かを判定し、点灯中であれば(ステップS10:Yes)、ステップS11に進み、一定時間経過後にインジケータ7を消灯させる。つまり運転者に対する報知を終了する。なおステップS8、ステップS11で一定時間経過後にインジケータ7を点灯又は消灯させているのは、運転者に煩わしさを感じさせないためである。すなわち減速ゲイン(実減速度と想定減速度との関係)が点灯閾値・消灯閾値付近にある場合に、減速ゲインが点灯閾値・消灯閾値を前後してインジケータ7の点灯・消灯が頻繁に繰り返されてしまうのを防止するためである。
その後ステップS1に戻る。なおステップS9で減速ゲインが消灯閾値よりも小さい場合(ステップS9:No)、またステップS10でインジケータ7が点灯中でない場合には(ステップS10:No)、そのままステップS1に戻る。ステップS1に戻り、再び回生トルクを出力中か否かを判定し、回生トルクを出力中でない場合には、ステップS12に進む。ステップS12では、インジケータ7が点灯中であるか否かを判定し、点灯中であれば(ステップS12:Yes)、ステップS13に進んでインジケータ7を消灯させ、ステップS1に戻る。インジケータ7が点灯中でない場合には(ステップS12:No)、そのままステップS1に戻る。
以上のように本実施形態では、電動車両1に設けられた加速度センサ36によって実減速度を検出し、この実減速度の想定減速度に対する割合(減速ゲイン)に基づいて、回生抑制制御が実行されていることを報知するか否かを判断するようにした。これにより適切なタイミングで運転者に対する報知を実行することができ、運転者に煩わしさを感じさせることも抑制することができる。さらに本実施形態では、点灯閾値及び消灯閾値を基準としているため、より適切なタイミングで運転者に対する報知を実行することができる。
また本実施形態では減速ゲインに基づいて運転者に対する報知のタイミングを判断していることで、実減速度及び想定減速度の大きさに拘わらず、常に的確な判断を行うことが可能となる。
また車速に応じて二種類の想定減速度a1,a2を設定するようにしたので、車速が遅い状態であっても、適切なタイミングで運転者に対する報知を行うことができる。すなわち車速が遅い場合、実減速度と想定減速度との差が比較的小さくても運転者が期待する減速感が得られ難いが、このような場合でも運転者に対して適切なタイミングで報知を行うことができる。
なお上述のように本実施形態では、減速ゲインに基づいて運転者に対する報知の実行・終了を判断したが、例えば、減速度差(|実減速度−想定減速度|)に基づいて判断するようにしてもよい。この報知制御の一例を図4のフローチャートを参照して説明する。なお図4のフローチャートは、ステップS15、S16、S19のみが図3に示すフローチャートと異なる。このため、ステップS15、S16、S19以外のステップについては説明を省略する。
上述のようにステップS3又はステップS4で、想定減速度が設定されると、ステップS15に進む。ステップS15では減速度差を演算する。すなわち加速度センサによって検出される実減速度と、ステップS3又はステップS4で設定された想定減速度と、からこれらの差である減速度差(|実減速度−想定減速度|)を演算する。
ステップS16では、この減速度差が点灯閾値(第3の閾値)以上であるか否かを判定する。減速度差が点灯閾値以上であれば(ステップS16:Yes)、つまり減速度差が大きい場合には、ステップS7に進み、所定のタイミングでインジケータ7を点灯させる。一方、ステップS16で、減速度差が点灯閾値よりも小さい場合には(ステップS16:No)、つまり減速度差があまり大きくない場合には、ステップS19に進み、減速度差が消灯閾値(第4の閾値)以下であるか否かを判定する。そして減速度差が消灯閾値以下であれば(ステップS19:Yes)、ステップS10に進み、所定のタイミングでインジケータ7を消灯させる。また、減速度差が消灯閾値よりも大きい場合には(ステップS19:No)、そのままステップS1に戻る。
このように減速度差(|実減速度−想定減速度|)に基づいて運転者に対する報知の実行・終了を判断するようにしても、減速ゲインで判断した場合と同様に、適切なタイミングで運転者に対する報知を行うことができる。
なお減速度差の点灯閾値(第3の閾値)及び消灯閾値(第4の閾値)は、適宜決定されればよいが、本実施形態では減速度差を絶対値としているため、これら点灯閾値及び消灯閾値は、何れも0よりも大きい値に設定される。
以上、本発明の実施形態について説明したが、本発明は、上述の実施形態に限定されるものではない。
例えば、上述の実施形態では、電動車両の車速に応じて、想定減速度a1,a2を設定するようにしたが、車速に拘わらず一方の想定減速度を設定するようにしてもよい。
また上述の実施形態では、点灯閾値と消灯閾値とを異なる値に設定しているが、これら点灯閾値と消灯閾値とを同一の値としてもよい。
また上述の実施形態では、減速ゲイン又は減速度差が点灯閾値以下になった後、一定時間経過後に運転者に対する報知を実行するようにしたが、勿論、減速ゲイン又は減速度差が点灯閾値以下になった直後に、運転者に対する報知を実行するようにしてもよい。同様に、減速ゲイン又は減速度差が消灯閾値以下になった直後に、運転者にする報知を終了するようにしてもよい。
また上述の実施形態では、電動車両の一例として、走行用モータを備える電気自動車(EV)を例示して本発明を説明したが、勿論、本発明は、各種の電動車両に適用可能である。本発明は、例えば、走行用モータと共にエンジン(内燃機関)を駆動装置として備えるハイブリッド車両等にも適用することができるものである。
1 電動車両
2 バッテリ
3 走行用モータ
4 自動変速機
5 駆動輪
6 インストゥルメントパネル
7 インジケータ
10 制御部(制御装置)
11 モータ制御手段
12 想定減速度設定手段
13 報知制御手段
14 トルク算出手段
31 アクセルペダル
32 アクセルペダルストロークセンサ
33 ブレーキペダル
34 ブレーキペダルストロークセンサ
35 車速センサ
36 加速度センサ
37 回転数検出センサ
38 バッテリ電圧センサ
39 バッテリ温度センサ
40 勾配センサ
2 バッテリ
3 走行用モータ
4 自動変速機
5 駆動輪
6 インストゥルメントパネル
7 インジケータ
10 制御部(制御装置)
11 モータ制御手段
12 想定減速度設定手段
13 報知制御手段
14 トルク算出手段
31 アクセルペダル
32 アクセルペダルストロークセンサ
33 ブレーキペダル
34 ブレーキペダルストロークセンサ
35 車速センサ
36 加速度センサ
37 回転数検出センサ
38 バッテリ電圧センサ
39 バッテリ温度センサ
40 勾配センサ
Claims (6)
- 充電可能なバッテリと、該バッテリに電気的に接続されて出力軸が車両の駆動輪に連結された電動機と、車両の加速度を検出する加速度センサと、を有する電動車両の制御装置であって、
前記電動機の回生制動制御を実行すると共に、該回生制動制御を実行する際の前記バッテリの電圧が所定値以下となるように前記電動機による回生制動量を抑制する回生抑制制御を実行する電動機制御手段と、
車体の姿勢、アクセル開度及び車両速度に基づいて想定減速度を設定する想定減速度設定手段と、
前記加速度センサによって検出される電動車両の実減速度が前記想定減速度よりも小さい場合に、前記電動機制御手段によって前記回生抑制制御が実行されていることを運転者に報知する報知制御手段と、を備える
ことを特徴とする電動車両の制御装置。 - 請求項1に記載の電動車両の制御装置において、
前記想定減速度設定手段は、前記車両速度が所定値以下である場合には、さらにブレーキペダルストロークに基づいて前記想定減速度を設定する
ことを特徴とする電動車両の制御装置。 - 請求項1又は2に記載の電動車両の制御装置において、
前記報知制御手段は、前記実減速度の前記想定減速度に対する割合である減速ゲインが第1の閾値以下である場合に、前記運転者に対する報知を実行する
ことを特徴とする電動車両の制御装置。 - 請求項3に記載の電動車両の制御装置において、
前記報知制御手段は、前記減速ゲインが前記第1の閾値以下になった後、当該第1の閾値よりも大きい第2の閾値以上になった場合に、前記運転者に対する報知を終了する
ことを特徴とする電動車両の制御装置。 - 請求項1又は2に記載の電動車両の制御装置において、
前記報知制御手段は、前記実減速度と前記想定減速度との差である減速度差が第3の閾値以上である場合に前記運転者に対する報知を実行する
ことを特徴とする電動車両の制御装置。 - 請求項5に記載の電動車両の制御装置において、
前記報知制御手段は、前記減速度差が前記第3の閾値以上になった後、当該第3の閾値よりも小さい第4の閾値以下になった場合に、前記運転者に対する報知を終了する
ことを特徴とする電動車両の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014251313A JP2016116271A (ja) | 2014-12-11 | 2014-12-11 | 電動車両の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014251313A JP2016116271A (ja) | 2014-12-11 | 2014-12-11 | 電動車両の制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016116271A true JP2016116271A (ja) | 2016-06-23 |
Family
ID=56142547
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014251313A Pending JP2016116271A (ja) | 2014-12-11 | 2014-12-11 | 電動車両の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016116271A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102021106033A1 (de) | 2020-03-18 | 2021-09-23 | Toyota Jidosha Kabushiki Kaisha | Elektrofahrzeug |
-
2014
- 2014-12-11 JP JP2014251313A patent/JP2016116271A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102021106033A1 (de) | 2020-03-18 | 2021-09-23 | Toyota Jidosha Kabushiki Kaisha | Elektrofahrzeug |
| US11951844B2 (en) | 2020-03-18 | 2024-04-09 | Toyota Jidosha Kabushiki Kaisha | Electric vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7103152B2 (ja) | 車両のブレーキ制御装置 | |
| CN112550247B (zh) | 制动控制装置 | |
| JP6011541B2 (ja) | 充電制御装置および充電制御方法 | |
| KR101807364B1 (ko) | 전동 모터에 의하여 구동되는 차량 및 그 차량의 제어 방법 | |
| JP6730668B2 (ja) | 車両の走行駆動装置 | |
| US20140019027A1 (en) | Vehicle and method for controlling vehicle | |
| US9868434B2 (en) | Vehicle and control method for vehicle | |
| JPWO2011161781A1 (ja) | 車両用制御装置および車両用制御方法 | |
| JP2017159741A (ja) | 制御システム | |
| JP2017178056A (ja) | 車両の走行駆動装置 | |
| JP2021011155A (ja) | ハイブリッド車両の制御装置 | |
| JP6414112B2 (ja) | 表示装置 | |
| JP5040065B2 (ja) | バッテリ充放電制御装置 | |
| JP6213388B2 (ja) | 車両 | |
| JP2016181384A (ja) | 電動車両 | |
| JP2011098577A (ja) | 車両 | |
| JP6508449B2 (ja) | 電動車両の制御装置 | |
| JP2016116271A (ja) | 電動車両の制御装置 | |
| JP5270775B1 (ja) | 電動車両および電動車両の制御方法 | |
| JP2015116871A (ja) | ハイブリッド電気自動車の制御装置 | |
| JP5814156B2 (ja) | 電動車両およびその制御方法 | |
| JP7233210B2 (ja) | 車両制御装置 | |
| JP2019080404A (ja) | 電源装置 | |
| JP2016111772A (ja) | モータ制御装置 | |
| JP2019018691A (ja) | ハイブリッド車両の制御装置 |