JP2016112643A - ロボットシステム、ワークの姿勢調整装置及びワークの搬送方法 - Google Patents
ロボットシステム、ワークの姿勢調整装置及びワークの搬送方法 Download PDFInfo
- Publication number
- JP2016112643A JP2016112643A JP2014253253A JP2014253253A JP2016112643A JP 2016112643 A JP2016112643 A JP 2016112643A JP 2014253253 A JP2014253253 A JP 2014253253A JP 2014253253 A JP2014253253 A JP 2014253253A JP 2016112643 A JP2016112643 A JP 2016112643A
- Authority
- JP
- Japan
- Prior art keywords
- workpiece
- robot
- posture
- unit
- support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
















Landscapes
- Manipulator (AREA)
Abstract
Description
以下、実施形態について詳細に説明する。説明において、同一要素又は同一機能を有する要素に同一の記号を付し、重複する説明を省略する。図1に示すように、ロボットシステム1は、ロボット2と、3Dセンサ3と、姿勢調整装置4と、コントローラ100とを備える。
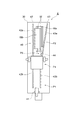
ロボット2はワークWを搬送するための多関節ロボットである。例えばロボット2は、基部11と、旋回部12と、第一アーム13と、第二アーム14と、先端揺動部15と、先端部16と、アクチュエータ21〜26とを有する。基部11は、床面に固定されている。旋回部12、第一アーム13、第二アーム14、先端揺動部15及び先端部16は互いに直列に連なっており、旋回部12が基部11に取り付けられている。
ロボット2の動作範囲には、トレー5,6,7が配置される。「ロボット2の動作範囲」とは、例えばロボット2の先端部16が到達可能な範囲を意味する。トレー5上には、搬送対象の複数のワークWがバラ積みされる。トレー6,7上には、ロボット2により搬送されたワークWが載置される。
3Dセンサ3は、トレー5上の三次元形状を検出し、その検出結果に基づいて複数のワークWの位置及び姿勢を検出する。3Dセンサ3の具体例としては、トレー5上の各部にレーザ光を照射し、照射箇所をカメラで撮像し、照射箇所の三次元座標を三角測量の原理によって算出するものが挙げられる。3Dセンサ3は、ステレオカメラによりトレー5上の三次元形状を検出するものであってもよい。
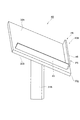
姿勢調整装置4は、ロボット2の動作範囲に設けられ、ワークWの姿勢を調整する。図2〜4に示すように、姿勢調整装置4は、支柱31,32と、支持板30と、調整部40と、センサ61〜64とを有する。
図1に示すように、コントローラ100は、機能的な構成(以下、「機能ブロック」という。)として、ピッキング対象特定部111と、揺動制御部112と、第一搬送制御部113と、外し制御部114と、配置状態取得部115と、第二搬送制御部116とを有する。
以上に説明したように、ロボットシステム1は、ワークWを搬送するロボット2と、ロボット2の動作範囲に設けられ、ワークWの姿勢を調整する姿勢調整装置4と、を備える。姿勢調整装置4は、ロボット2により搬送されたワークWを支持する傾斜した支持板30と、支持板30上に設けられ、支持板30上を滑落するワークWに接触して当該ワークWの姿勢を整える調整部40と、を有する。
Claims (12)
- ワークを搬送するロボットと、
前記ロボットの動作範囲に設けられ、前記ワークの姿勢を調整する姿勢調整装置と、を備え、
前記姿勢調整装置は、
前記ロボットにより搬送された前記ワークを支持する傾斜した支持部と、
前記支持部上に設けられ、前記支持部上を滑落する前記ワークに接触して当該ワークの姿勢を整える調整部と、を有するロボットシステム。 - 前記調整部は、
前記支持部上を滑落したワークを受け入れ、前記ロボットによるピッキングのための姿勢に保つ保持部と、
前記ワークを前記保持部内に誘導するガイド部とを有する、請求項1記載のロボットシステム。 - 前記調整部は、前記支持部上に複数の前記ワークが配置された場合に、一部のワークの滑落を規制して他のワークのみを滑落させる規制部を有する、請求項1又は2記載のロボットシステム。
- 前記姿勢調整装置は、前記支持部上における前記ワークの配置状態を検出するセンサを更に有する、請求項1〜3のいずれか一項記載のロボットシステム。
- 前記姿勢調整装置は、前記支持部上における前記ワークの配置状態として、前記支持部上における前記ワークの有無を検出するセンサを有する、請求項4記載のロボットシステム。
- 前記姿勢調整装置は、前記支持部上における前記ワークの配置状態として、前記支持部上を滑落した前記ワークの姿勢を検出するセンサを有する、請求項4又は5記載のロボットシステム。
- 前記姿勢調整装置は、前記支持部の傾斜角の可変機構を更に有する、請求項1〜6のいずれか一項記載のロボットシステム。
- 前記ワークをピッキングして前記支持部上に搬送し、前記支持部上を滑落した前記ワークを再度ピッキングして搬送するように前記ロボットを制御するコントローラを更に備える、請求項1〜7のいずれか一項記載のロボットシステム。
- 前記コントローラは、ピッキングした前記ワークを支持部上に搬送する前に、当該ワークを揺動させるようにロボットを制御する、請求項8記載のロボットシステム。
- 前記ワークをピッキングして前記支持部上に搬送し、前記他のワークが滑落した後に前記一部のワークを前記規制部から外し、前記支持部上を滑落した前記他のワークを再度ピッキングして搬送し、前記支持部上を滑落した前記一部のワークを再度ピッキングして搬送するように前記ロボットを制御するコントローラを更に備える、請求項3記載のロボットシステム。
- ロボットの動作範囲に設けられ、前記ロボットにより搬送されたワークを支持する傾斜した支持部と、
前記支持部上に設けられ、前記支持部上を滑落する前記ワークに接触して当該ワークの姿勢を整える調整部と、を有するワークの姿勢調整装置。 - ロボットの動作範囲に設けられ、前記ロボットにより搬送されたワークを支持する傾斜した支持部と、前記支持部上に設けられ、前記支持部上を滑落する前記ワークに接触して当該ワークの姿勢を整える調整部と、を有する姿勢調整装置を用い、
前記ロボットにより前記ワークをピッキングして前記支持部上に搬送すること、
前記支持部上を滑落した前記ワークを前記ロボットにより再度ピッキングして搬送すること、を含むワークの搬送方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014253253A JP6287803B2 (ja) | 2014-12-15 | 2014-12-15 | ロボットシステム、ワークの姿勢調整装置及びワークの搬送方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014253253A JP6287803B2 (ja) | 2014-12-15 | 2014-12-15 | ロボットシステム、ワークの姿勢調整装置及びワークの搬送方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016112643A true JP2016112643A (ja) | 2016-06-23 |
| JP6287803B2 JP6287803B2 (ja) | 2018-03-07 |
Family
ID=56139496
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014253253A Active JP6287803B2 (ja) | 2014-12-15 | 2014-12-15 | ロボットシステム、ワークの姿勢調整装置及びワークの搬送方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6287803B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017080846A (ja) * | 2015-10-28 | 2017-05-18 | ファナック株式会社 | ワークの向きを調整可能な仮置き装置 |
| JP2021104571A (ja) * | 2019-12-27 | 2021-07-26 | 株式会社クボタ | ハンドリング装置及びハンドリング方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013094938A (ja) * | 2011-11-04 | 2013-05-20 | Mitsubishi Electric Corp | 部品供給方法、及び部品供給システム |
| JP2015074065A (ja) * | 2013-10-10 | 2015-04-20 | セイコーエプソン株式会社 | ロボット及び取り出し方法 |
| JP2015127252A (ja) * | 2013-12-27 | 2015-07-09 | 川崎重工業株式会社 | ワーク整列方法及びワーク整列システム |
-
2014
- 2014-12-15 JP JP2014253253A patent/JP6287803B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013094938A (ja) * | 2011-11-04 | 2013-05-20 | Mitsubishi Electric Corp | 部品供給方法、及び部品供給システム |
| JP2015074065A (ja) * | 2013-10-10 | 2015-04-20 | セイコーエプソン株式会社 | ロボット及び取り出し方法 |
| JP2015127252A (ja) * | 2013-12-27 | 2015-07-09 | 川崎重工業株式会社 | ワーク整列方法及びワーク整列システム |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017080846A (ja) * | 2015-10-28 | 2017-05-18 | ファナック株式会社 | ワークの向きを調整可能な仮置き装置 |
| US10179380B2 (en) | 2015-10-28 | 2019-01-15 | Fanuc Corporation | Temporary placement device able to adjust orientation of workpiece |
| JP2021104571A (ja) * | 2019-12-27 | 2021-07-26 | 株式会社クボタ | ハンドリング装置及びハンドリング方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6287803B2 (ja) | 2018-03-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2899148B1 (en) | Parallel link robot, hand for parallel link robot, and parallel link robot system | |
| JP7507284B2 (ja) | ロボットハンド、ロボット及びロボットシステム | |
| JP6273084B2 (ja) | ロボットシステムおよびワークの搬送方法 | |
| JP2013078825A (ja) | ロボット装置、ロボットシステムおよび被加工物の製造方法 | |
| US9102063B2 (en) | Robot apparatus | |
| JPWO2020009148A1 (ja) | ワーク搬送システムおよびワーク搬送方法 | |
| JP2016060002A (ja) | ロボットシステムおよびワークピッキング方法 | |
| BR102012003829A2 (pt) | Robotized system and processed object production method. | |
| JP6838895B2 (ja) | ワーク搬送装置およびその運転方法 | |
| JP6011278B2 (ja) | 物品処理システム | |
| JP2016147330A (ja) | 物体認識に基づく制御装置 | |
| JP6219901B2 (ja) | ワークの向きを調整可能な仮置き装置 | |
| JP5913845B2 (ja) | 板状部材の搬送装置および搬送方法 | |
| JP6287803B2 (ja) | ロボットシステム、ワークの姿勢調整装置及びワークの搬送方法 | |
| JP2014061561A (ja) | ロボットシステムおよび物品製造方法 | |
| JP2010105081A (ja) | ビンピッキング装置 | |
| JP6330437B2 (ja) | ローダ装置、板材搬送方法、及び板材加工システム | |
| KR101197125B1 (ko) | 물체 파지 시스템 및 물체 파지 방법 | |
| JP5827046B2 (ja) | 板状部材の支持装置および支持方法、ならびに板状部材の搬送装置 | |
| JP6993426B2 (ja) | 部品移載装置 | |
| JP6948125B2 (ja) | 搬送システム及びその運転方法 | |
| JP5370788B2 (ja) | 対象物加工システム | |
| JP7238375B2 (ja) | 保持機構及び搬送方法 | |
| WO2013042185A1 (ja) | ハンドリングシステム | |
| JP2016203201A (ja) | 自動プログラミング装置、ローダ装置、及び板材搬送方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170919 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171025 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180109 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180122 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6287803 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |